Аракелян А.К., Афанасьев А.А. Вентильные электрические машины в системах регулируемых электроприводов. Том 2
Подождите немного. Документ загружается.

247
246
Г л а в а в о с е м н а д ц а т а я
ЧИСЛЕННЫЕ МАТЕМАТИЧЕСКИЕ МОДЕЛИ
ВЕНТИЛЬНЫХ МАШИН
18.1. Математическая модель вентильного элемента
При исследовании рабочих и специальных режимов
электрических машин в вентильных цепях сравнительно
эффективным может быть метод моделирования вентилей
преобразовательного устройства кусочно-линейными резисторами.
В этом случае открытому вентилю соответствует малое
сопротивление резистора, закрытому - относительно большое.
Таким образом, в отличие от представления вентилей идеальными
ключами, когда структура проводящих цепей преобразователя
испытывает дискретные изменения, данный метод позволяет
оперировать с электрической цепью неизменной структуры и не
требует составления уравнений для всего набора ожидаемых
структур.
Состояние вентиля с номером j (открыт, закрыт)
характеризуем коэффициентом состояния
j
k
, который равен (-1)
или нулю для закрытого вентиля и (+1) - для открытого (табл.18.1).
Принимаем, что вентили меняют свое состояние скачком
(мгновенно), причем на временном интервале, равном шагу
интегрирования дифференциальных уравнений, состояние вентилей
остается неизменным. Для уточнения момента изменения
коэффициента
j
k
можно уменьшать в целое число раз шаг
интегрирования на интервале, на котором зафиксирована смена
знака
j
k
.
Обозначим коэффициент состояния вентиля на шаге, предше-
ствующем рассчитываемому, через
j
k
, на шаге, следующем за
ним (рассчитываемом), -
j
k
. Коэффициент
j
k
является функцией
нескольких переменных, из которых для тиристорных элементов
следует в первую очередь назвать:
j
k
; ток
j
i
и напряжение
j
u
вентиля; ток управления
j
i
у
; время
восстановления запирающих свойств
в
t
.
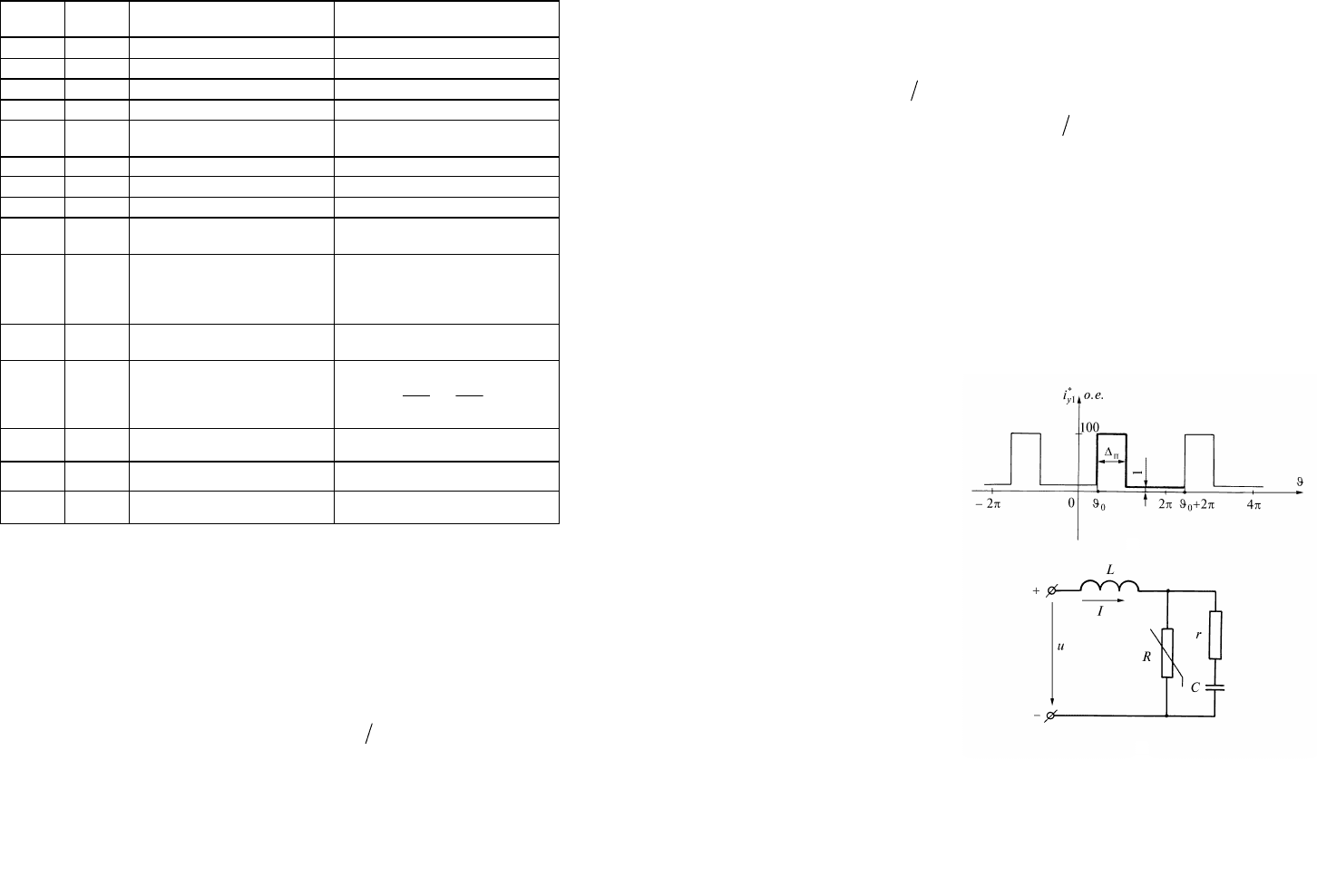
Характер этой функции иллюстрирует табл.18.2, в которой
приведены возможные комбинации управляющих факторов,
определяющих состояние тиристорного вентиля
1
.
Будем в дальнейшем считать, что смена знаков
j
u
и
j
i
происходит одновременно, т.е. пренебрегаем временем
запаздывания в смене знака
j
u
при выключении вентиля. Это время
примерно совпадает с временем нарастания обратного тока до
максимального значения.
Коэффициент
j
k
при допущениях
рк
перудзв
; ;0 ;0
dt
du
iitt
j
j
можно определить аналитически, используя формулу
j
k
jjj
uik 1,0signsign
у
, (18.1)
где
j
i
у
- нормализированный ток управления «j» вентиля, который
при уровнях фактического тока управления
0
у
j
i
и
0
у
j
i
принимает соответственно значения:
100
у
j
i
и
1
у
j
i
.
В справедливости формулы (18.1) можно убедиться путем
непосредственной подстановки в нее данных из табл. 18.1.
Коэффициент k
j
Состояние вентиля Сопротивление
вентиля
j
R
—1 закрыт
max
R
+1 открыт
min
R
Таблица 18.1
1
уд
1
i
- ток удержания;
дин уд.
2
i
- ток удержания динамический (ток выключения);
пер
3
i
- ток переключения;
рк
4
dt
du
j
- критическая скорость нарастания прямого
напряжения;
1
5
t
- время, отсчитываемое от момента появления обратного
тока;
2
6
t
- время, отсчитываемое от момента одновременного появления
0
j
u
и
0
у
j
i
,
з
t
- время запаздывания отпирания.
247
249
248
j
k
j
u
j
i
у
j
k
1
+ 0
1
1
+ + +1
1 — 0 1
1
— +
1
+1 + 0 +1 (
уд
ii
j
)
1
+1 + + +1
+1
0
1
+1
+
1
+1 + 0 1 (
уд
ii
j
)
+1 +
0
(на предыдущем шаге
j
i
у
>0)
1 (
уд.дин
ii
j
)
2
1
+ 0
+ 1(
пер
ii
j
)
3
1
+ 0
+1
4
рк
dt
du
dt
du
jj
+1 — 0
+1
5
в1
tt
+1 — + +1
в1
tt
1
+ +
1
6
з2
tt
Таблица 18.2
Для вентильных машин с датчиками положения ротора, у
которых отсутствует канал электрического воздействия на угол
отпирания вентилей, и для датчиков с наличием такого канала, но
при постоянстве управляющего воздействия по этому каналу
нормализованный ток управления вентилями
j
i
у
будет функцией
только угла положения ротора
.
На рис.18.1,а показана функция
1у1у
ii
для вентиля 1 с
шириной отпирающего импульса
3
и
. Ее аналитическоее
представление следующее:
kIi
2
1у1у
,
где
, 122
00
kk
;...2;1;0;1;2
k
Рис.18.1. Моделирование тиристорного
вентиля функциональным резисторным
сопротивлением, шунтированным
r - C ветвью
.2 при 1
, при 100
0п0
п00
1у
I
Для токов управления других вентилей, фазовые сдвиги
которых кратны
3
, имеем:
31
1уу
jii
j
, .6,...3,2
j
Коэффициент состояния вентиля применительно к
транзисторным и диодным элементам определяется следующим
образом:
jj
ik
у
т
;
1
Д
j
k
, если
0
jj
uu
;
1
Д
j
k
, если
0
jj
uu
,
где
j
i
у
;
j
u - соответ-
ственно нормализирован-
ный ток управления j
транзистором, при-
нимающий значения
1
, и напряжение на j
диоде, взятые в начале
рассматриваемого шага
интегрирования.
При моделировании
вентилей функциональ-
ными резисторами
возникают вычислитель-
ные трудности решения
дифференциальных урав-
нений, связанные с
необходимостью зна-
чительного сокращения
шага интегрирования для
выдерживания заданной
а
б
248
251
250
точности решения. Можно показать, что шунтирование
моделирующих резисторов цепями r - C, защищающими вентили
от напряжений с крутым фронтом, позволяет существенно
увеличить допустимый шаг интегрирования [45].
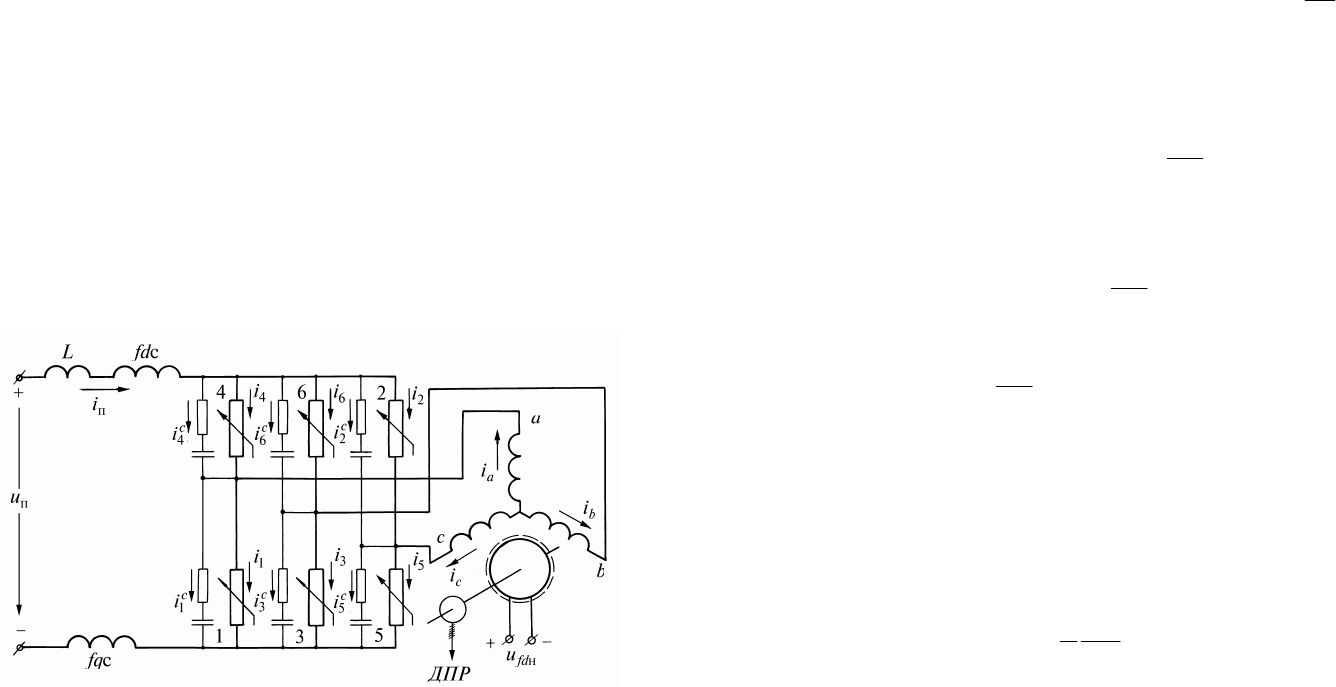
18.2. Общие принципы численного моделирования
В соответствии с общими принципами моделирования
вентильных элементов, изложенными в предыдущей главе,
рассмотрим особенности составления исходных дифференциальных
уравнений вентильной машины применительно к расчетной схеме
(рис.18.2), соответствующей вентильному двигателю постоянного
тока с электромагнитным возбуждением и естественной
коммутацией, имеющему обмотки независимого
нfd
и
последовательного возбуждения
c;с fqfd
по осям d и q.
Полная система из 16 уравнений электрического равновесия,
отвечающая 5 независимым узлам и 11 независимым контурам
этой расчетной схемы, имеет вид:
ссс
iiiiiii
642п
в
6
в
4
в
2
; (18.2)
сс
a
iiiii
41
в
4
в
1
; (18.3)
Рис.18.2. Расчетная схема вентильного двигателя с инвертором тока
сс
b
iiiii
63
в
6
в
3
; (18.4)
сс
c
iiiii
25
в
2
в
5
; (18.5)
0
в
6
в
6
в
4
в
4
в
3
в
3
в
1
в
1
iRiRiRiR
; (18.6)
0
в
6
в
6
в
5
в
5
в
3
в
3
в
2
в
2
iRiRiRiR
; (18.7)
0
cba
iii
; (18.8)
dt
di
LuuiRiRRiu
fqfd
п
cc
в
4
в
4
в
1
в
1пп
; (18.9)
ab
uuiRiR
в
6
в
6
в
4
в
4
0
; (18.10)
bc
uuiRiR
в
6
в
6
в
2
в
2
0
; (18.11)
dt
du
CruiR
c
j
jj
c
jjj
вв
0
;
6,...2,1
j
. (18.12)
Для токов демпферных цепочек, шунтирующих сопротивления
вентилей, справедливы дифференциальные уравнения:
6,...2,1, j
dt
du
Ci
c
j
j
c
j
. (18.13)
Напряжения, генерируемые в контурах электрической машины
Д2;...ДrД1;н;c;;c;;;; fdfqfdcbak
dt
d
iru
k
kkk
, (18.14)
где потокосцепления контуров
k
, являющиеся функциями вида:
;;...;;;;;;
ДД2Д1нп rfdcbakk
iiiiiiii
, (18.15)
при наличии математического описания электрической машины
могут считаться известными.
Фиксируя уравнение механического равновесия моментов на
валу вентильной машины:
с
р
MM
dt
d
p
J
, (18.16)
где М - электромагнитный момент, определяемый, например, по
формуле (11.10), и уравнение связи переменных
и
р
:

253
252
р
dt
d
, (18.17)
получим исходную систему уравнений для силовой части
вентильной машины.
Исключим из общей системы уравнений токи вентилей
6,...2,1
в
ji
j
, записав формулы (18.2)-(18.7) в матричной форме:
c
iBIiC
в
, (18.18)
где
в
6
в
5
в
3
в
2
в
6
в
4
в
3
в
1
00
00
010010
100100
001001
101010
RRRR
RRRR
C
, (18.19)
,... ,00 ,...
T
621
T
п
T
в
6
в
2
в
1
в cccc
cba
iiiiiiiiii iIi
000000
000000
010010
100100
001001
101010
B
. (18.20)
Принимая во внимание (18.13), из формулы (18.18) можем полу-
чить матричные выражения для тока и напряжения вентиля:
dt
d
c
u
FCICi
11в
, (18.21)
ввв
iRu
, (18.22)
где
000000
000000
0000
0000
0000
000
52
63
41
642
cc
cc
c
ccc
CC
CC
CC
CCC
F
, (18.23)
T
621
...
cccc
uuuu
,
в
6
в
2
в
1
в
...00
............
0...00
0...0
0...0
R
R
R
R . (18.24)
Легко показать, что
0det
в
4
в
1
3
1
в
3
в
jj
j
jj
RRRRC , (18.25)
(
вв
6 jj
RR
, в частности
в
1
в
7
RR
).
Из (18.25) следует, что матрица
1
C
существует..
Аналогично система уравнений (18.12) с учетом (18.21) в
матричной форме получит вид:
FCR
u
M
1в
dt
d
c
, (18.26)
где
FCRTM
1в
c
, (18.27)
255
254
,
...00
............
0...00
0...0
0...0
1
2
1
c
c
c
c
T
T
T
T
. 6,...2,1 jCrT
c
j
c
j
c
j
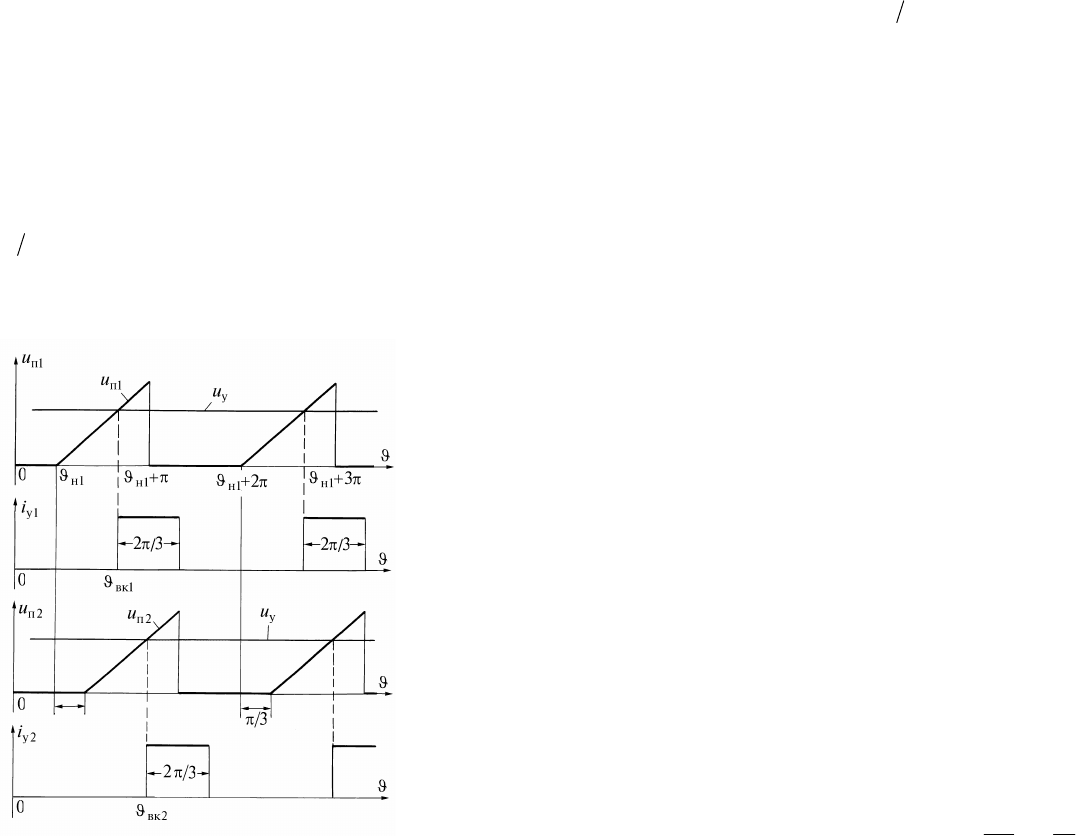
Программа формирования токов управления вентилями
6,...2,1
у
ji
j
предусматривает расчет на каждом шаге
интегрирования дифференциальных уравнений вентильной машины
шести пилообразных напряжений
j
u
п
, изменяющихся в функции
углового положения ротора
с последовательным взаимным
сдвигом на
3
электрических радиан (рис.18.3). Пилообразные
напряжения сравниваются с напряжением управления
у
u
.
у
u
–
известная функция времени. В частности, в нормальном
установившемся режиме
const
у
u
.
В момент равенства напряжений
j
u
п
и
у
u
, когда их разность
уп
uu
j
меняет знак с отрицательного на положительный,
фиксируется появление импульса тока управления вентиля
j
u
у
длительностью
32
радиан.
Одновременно на каждом шаге интегрирования
дифференциальных уравнений по формулам (18.21), (18.22)
определяются токи и напряжения вентилей. Значения трех величин
вентиля:
j
i
у
;
в
j
i
;
в
j
u
, будучи сопоставлены с их уровнями на
предыдущем шаге, позволяют найти, в соответствии с табл.18.2,
коэффициент состояния вентиля, а значит, и его сопротивление
в
j
R
.
Таким образом, после записи части исходных выражений (18.2)-
(18.17) в матричной форме будем иметь уравнения, относящиеся
только к преобразователю частоты – (18.210), (18.22), (18.26);
только к электрической машине – (18.8), (18.14)-(18.17); только к
цепям, общим для преобразователя частоты и машины, – (18.9)-
(18.11).
18.3. Математические модели вентильных двигателей
ï î ñòî ÿí í î ãî òî êà â êî î ðäèí àòàõ
d, q
18.3.1. Математическая модель вентильного двигателя
с одномостовым преобразователем частоты
Вентильный двигатель постоянного тока с одномостовым
преобразователем частоты представляется расчетной
электрической цепью неизменной топологической структуры
(рис.18.2), содержащей 16 ветвей, 6 узлов и 11 независимых
контуров. Режим этой цепи можно рассчитать известными из теории
цепей методами, например, методом переменных состояния.
Обратимся в начале к синхронной машине, записав ее
уравнения (18.14)-(18.16) в координатах d, q.
Потокосцепления обмоток в этих координатах не являются
функциями угловой координаты ротора
. Поэтому производные
потокосцеплений и токов связаны матричным равенством:
dt
d
dt
d i
L
, (18.28)
Рис.18.3. К программе формирования токов управления тиристорами
инвертора тока
257
256
где
;......
...
T
cc221121н
T
121
fqfdQrQQqDrDDfdd
N
(18.29)
T
221121нп
T
221
.........
QrQQqDrDDfddN
iiiiiiiiiiiii
i
; (18.30)
212111
)2(22221
211211
...
............
...
...
NNNN
N
N
LLL
LLL
LLL
L
i
- (18.31)
матрица динамических индуктивностей размером
21
NN
.
Уравнения (18.9)-(18.11), (18.16) с учетом (18.14), (18.28) можно
привести к нормальной форме Коши:
п
вв1,4пп
u
dt
d
iRiR
i
L
, (18.32)
в,64-в
р
iRiСС
i
L
dqbaМbaba
r
dt
d
, (18.33)
в6-в2,
р
iRiСС
i
L
dqcbМcbcb
r
dt
d
, (18.34)
с
0 0 0 0
1
р
2
3
Mdiddidp
dt
d
p
J
q
d
i
i
d
e
q
i i
iLiL
, (18.35)
где
0...00;
дрдрcп
L
f
LLLL
,
L - индуктивность сглаживающего дросселя;
212111222212
c
......
NNNNNNNN
f
LLLLLLL
;
; ; ;3
T
1
T
1
1
ecbcbebaba
re LLCLLLCL
;... ;...
221211211
1
Neee
e
N
LLLLLL LL
; 3cos3sin3
ba
C
;
T
dq
М
; ; cossin3
T
qd
dqcb
ii iC
; 0000 ; 0000 ; 0000
в
6
в
2
-6в2,в
6
в
4
,6-4вв
4
в
1
в1,4
RRRRRR RRR
; ; 0...00
ccпп
п
fqfd
RRRRR R
cc
; ;
fqfd
RRR
- активные сопротивления сглаживающегоо
дросселя и последовательных обмоток возбуждения;
r - активное сопротивление фазы обмотки якоря.
Выражение для электромагнитного момента в уравнении
движения ротора (18.35) получено из формулы для коэнергии
магнитного поля в фазных координатах [213]:
i
i
dW
0
, (18.36)
где
.... , ...
Т
нн fdcbafdcba
iiii
i
Принимая во внимание, что потокосцепления роторных обмоток,
как отмечено выше, не зависят от угловой координаты ротора
,
будем иметь:
cbakidp
W
pM
k
k
i
k
k
,,,
0
. (18.37)
Дифференцируя известные зависимости, связывающие
переменные в координатах d, q и фазных
,32sin32cos
,32sin32cos
,,,sincos
qdc
qdb
qda
fff
fff
iffff
(18.38)
формулу (18.37) после ряда преобразований можно представить в
виде:
q
d
i
i
dqqd
didipM
0 0
2
3
. (18.39)
259
258
После подстановки в (18.39) равенств, очевидных из
выражения (18.31)
, ;
00
1
ii
iLiL dd
e
qd (18.40)
получим формулу для электромагнитного момента в уравнении
(18.35).
Если пренебречь сравнительно слабыми зависимостями,
обусловленными насыщением магнитной цепи, вида
qdd
i
и
dqq
i
, то формула для электромагнитного момента в
уравнении (18.35) примет известный вид:
dqqd
iipM
2
3
, (18.41)
где
d
и
q
находятся из интегральных выражений (18.40).
К уравнениям (18.32)...(18.35) следует добавить уравнения
равновесия напряжений обмоток независимого возбуждения и
успокоительных:
ннн
2
fdfdfd
iru
dt
d
i
L
, (18.42)
kk
k
ir
dt
d
i
L
, (18.43)
где
122221
2
...
N
LLLL
,
k
L
- вектор-строки матрицы
L
с номерами k, относящиеся к
контурам успокоительной обмотки.
Присовокупив к уравнениям (18.32)-(18.35), (18.42), (18.43)
зависимости (18.17), (18.26), получим полную систему
дифференциальных уравнений вентильного двигателя в нормальной
форме Коши, которую можно представить в виде:
f
x
A
dt
d
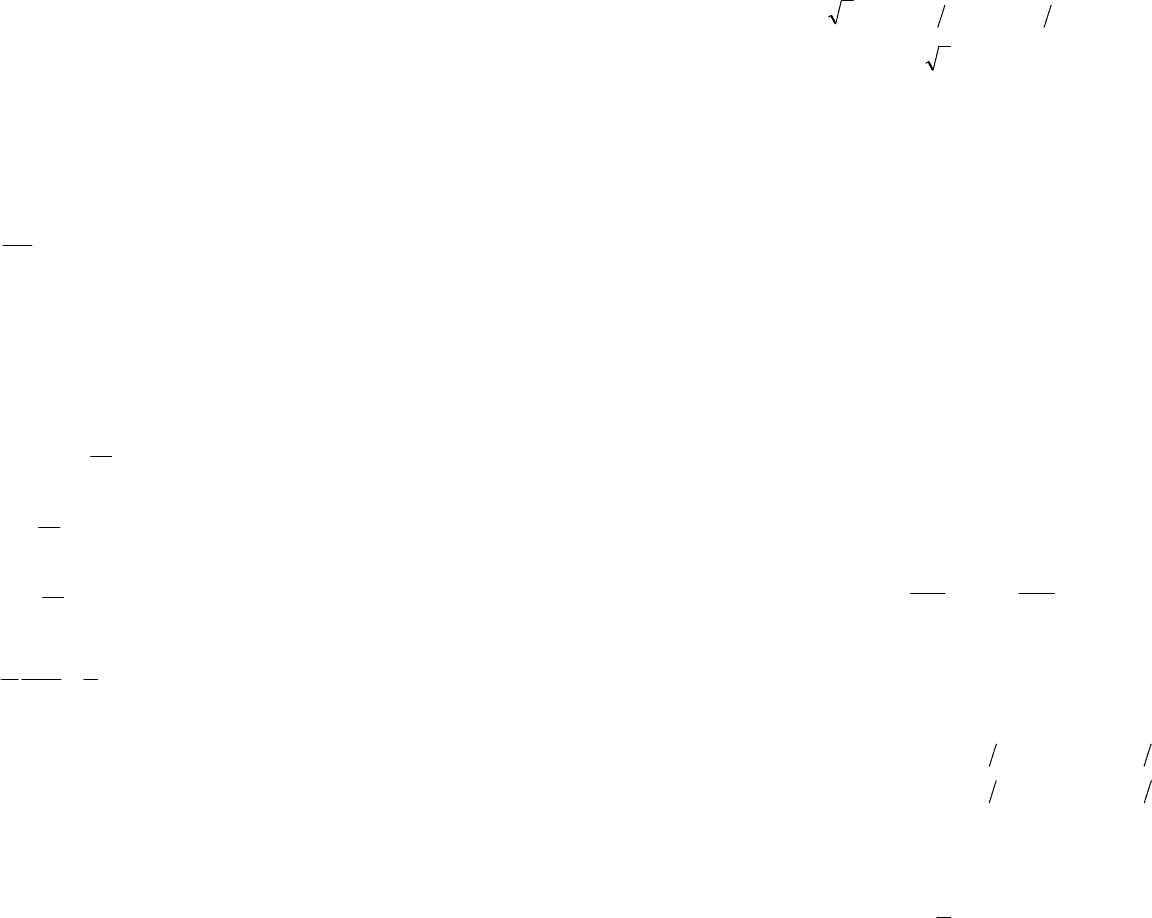
, (18.44)
где
A
- квадратная матрица размером
6
N
, структура которой
показана на рис.18.4;
.... ,...
T
621
T
р
T
621
N
c
N
fffxxx fuix
На рис.18.4 обозначены матрицы:
FCRM
1в1,4п
, (18.45)
FCRM
1,6-4в
ba
, (18.46)
FCRM
1-6в2,
cb
. (18.47)
При расчете коэффициентов состояния вентилей с помощью
формул (18.21), (18.22) вектор
T
п
00
cba
iiiiI
в первой из них
следует выразить через независимые токи:
dqdq пп
iCI
, (18.48)
Рис.18.4. Структура квадратной матрицы
A
дифференциального
уравнения (18.43) вентильного двигателя с расчетной схемой на рис.18.2
261
260
где
000
000
32sin32cos0
32sin32cos0
sincos0
001
пdq
C
, (18.49)
.
T
пп qddq
iiii
(18.50)
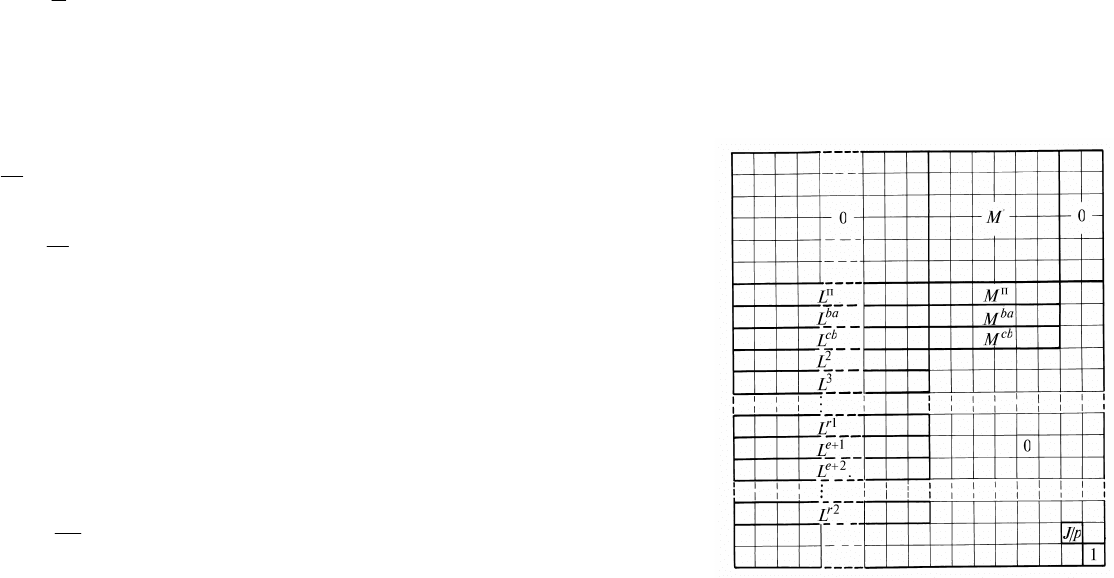
18.3.2. Математические модели вентильного двигателя
с двухмостовым преобразователем частоты
18.3.2.1. Математическая модель с постоянной
топологической структурой
Вентильный двигатель на основе инвертора тока с
естественной коммутацией имеет два мостовых преобразователя
(рис.18.5). Первый из них, трехфазные зажимы которого
подключаются к сети, будем называть сетевым (СМП), второй,
аналогичные зажимы которого подключаются к синхронной машине,
- машинным (ММП).
В общем случае подход к описанию СМП сходен с
рассмотренным только что выше, так как трехфазная сеть может
представляться идеализированной синхронной машиной, у которой
якорные ЭДС синусоидальны, имеют неизменные амплитуду
m
E
и угловую частоту
. Роторные контуры со свободными токами
отсутствуют. Каждая фаза обмотки якоря обладает
индуктивностью рассеяния
L
~
и активным сопротивлением
r
~
.
Отпирающие импульсы тиристоров СМП имеют 120-
градусную длительность, управляются по вертикальному принципу
(рис.18.3) и следуют в функции угловой координаты "ротора" этого
идеализированного генератора:
t
0
~
~
. (18.51)
По аналогии с синхронной машиной имеем:
.
~
~
~
;
~
~
~
qqdmd
iLiLE
Матрица динамических индуктивностей, типа (18.31), будет
двухмерной:
L
L
L
~
0
0
~
~
.
Вектор независимых токов сети содержит две компоненты
T
~
~
~
qd
iii
. Эти токи будут определяться с помощью двух
дифференциальных уравнений типа (18.33), (18.34),
соответствующих равновесию напряжений в линейных контурах
питающей сети
ab
~
~
и
bc
~
~
:
в6,4-в
~
~
~
~
~
~
~
~
~
~
~
~
iRiCC
i
L
abMabab
r
dt
d
, (18.52)
в6-,2в
~
~
~
~
~
~ ~
~
~
~
~
~
iRiCC
i
L
bcMbcbc
r
dt
d
, (18.53)
Рис.18.5. Расчетная схема вентильного двигателя с сетевым (СМП)
и машинным (ММП) мостами преобразователя частоты
263
262
где
LCL
~
~
~
~
~
abab
;
LCL
~
~
~
~
~
bcbc
;
векторы
в-6,2в6,4в
~
~~
~
~
,
~
,
~
,
~
,, iRRCC
Mbcab
по форме не отличаются
от своих аналогов ММП, выражения для которых приведены выше.
К уравнениям (18.52), (18.53) следует добавить также
матричное уравнение для напряжений емкостей демпферных
цепочек вентилей СМП:
c
c
I
dt
d
uCR
u
M
~
~~~
~
~
1в
, (18.54)
где
dqdq
I
пп
~
~
~
iC
;
Т
вв
~
~
~
qddq
iiii
;
представленные в (18.54) сомножители имеют выражения,
полностью аналогичные формулам (18.19), (18.23), (18.24), (18.27),
(18.49).
Уравнение, соответствующее равновесию напряжений в
контуре звена постоянного тока обоих преобразовательных мостов,
будет отлично от (18.32) и иметь вид:
вв1,4вв1,4пп
~
~
iRiRiR
i
L
dt
d
. (18.55)
Таким образом, система дифференциальных уравнений
рассматриваемого вентильного двигателя также может быть
приведена к нормальной форме Коши вида (18.44):
f
x
A
11
dt
d
, (18.56)
где квадратная матрица
A
1
, в отличие от матрицы
A
в (18.44),
будет иметь размер на 8 единиц больше, т.е. N +14;
T
p
~
~
cc
uiuix
.
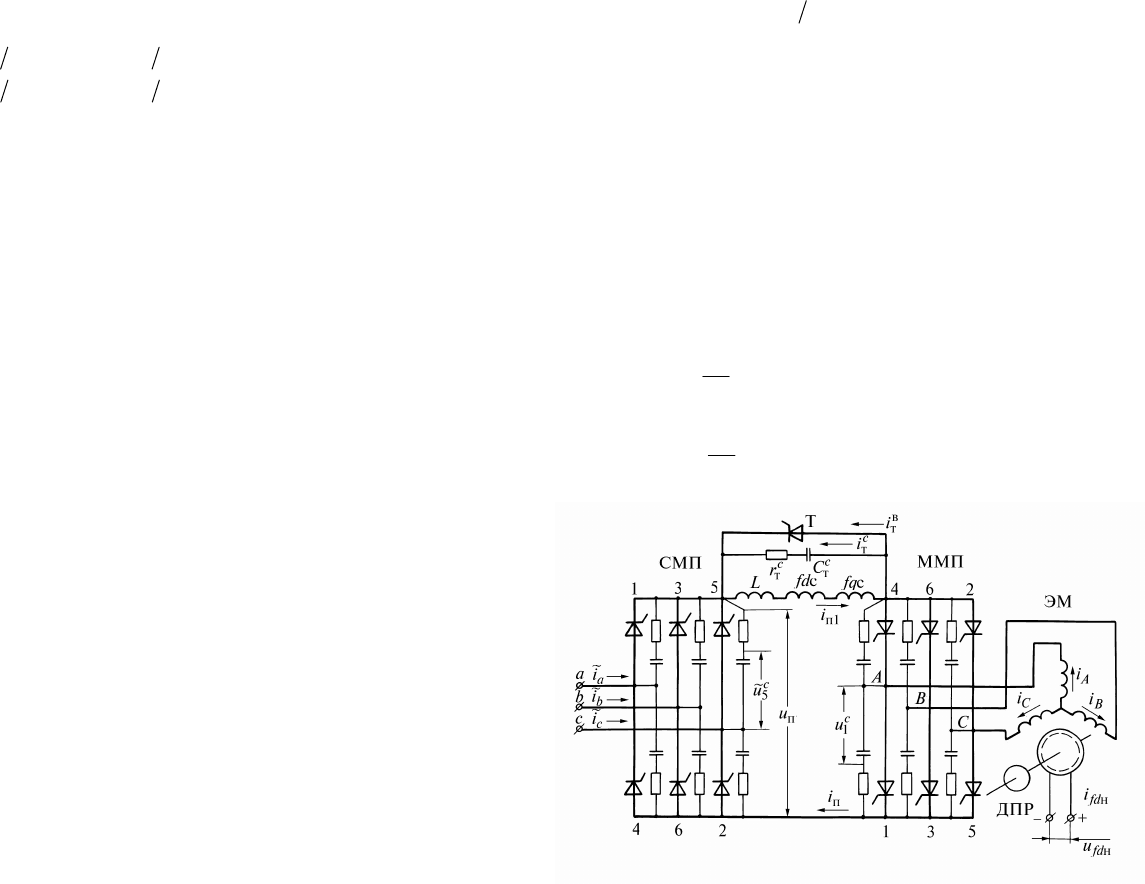
Структура матрицы
A
1
размером 22 (N=8) показана на
рис.18.6, где обозначено:
.
~
~
~~
;
~
~
~~
;
~
~
~
~
16-,2в
16,4в
14,1вп
FCRM
FCRM
FCRM
cb
ba
Вентильный двигатель рассматриваемого типа имеет
естественную коммутацию тиристоров, которая в ММП
осуществляется за счет ЭДС вращения обмотки якоря. При пуске
двигателя в ход и работе с малыми скоростями, когда ЭДС
вращения отсутствует или недостаточно велика, организуется
режим принудительной коммутации путем циклического прерывания
до нуля тока
п
i
в звене постоянного тока преобразователя за счет
перевода СМП в инверторный режим. Для улучшения показателей
пуска целесообразно режим изменения тока
п
i
осуществлять с
возможно большей скоростью. С этой целью производится
шунтирование сглаживающего реактора и последовательных
обмоток возбуждения специальным тиристором Т (рис.18.5),
который отпирает контур для замыкания рабочего тока
п1
i
этих
индуктивных элементов на время ускоренного изменения общего
тока мостов
п
i
.
В расчетной схеме двигателя тиристор Т моделируется
нелинейным резистором, шунтированным ветвью из
последовательно включенных элементов
c
T
r
и
c
T
C
(рис.18.5).
Рис.18.6. Структура квадратной матрицы
A
1
дифференциального
уравнения (18.56) вентильного двигателя
265
264
Применение дополнительного тиристора Т увеличивает порядок
системы дифференциальных уравнений вентильного двигателя на
единицу. Имеем:
f
x
A
22
dt
d
, (18.57)
где квадратная матрица
A
2
имеет размер N+15 и отличается отт
предыдущей матрицы
A
1
наличием только новой окаймляющей
строки и нового окаймляющего столбца (рис.18.7,а);
c
T
c
T
c
T
CrT
- единственный новый элемент в нижнем правом уг-
лу матрицы
A
2
;
T
c
T
c
p
1
~
u
c
uiuix
, (18.58)
вектор
1
i
в (18.58) отличается от аналогичного вектора
i
в (18.30)
только тем, что в качестве первого элемента у него стоит
п1
i
ток
вместо тока
п
i
.
Коэффициент состояния тиристора Т находится по данным его
тока
в
T
i
, напряжения
в
T
u
и тока управления
T
у
i
с помощью
табл.18.2. Имеем:
п1п
1п
1
в
T
в
T
iRRi
iL
,
в
T
в
T
в
T
iRu
,
где
в
T
R
- нелинейное сопротивление, моделирующее тиристор Т.
Импульсы тока управления
T
у
i
(нормализированные) рассчиты-
ваются в функции углового положения ротора
(рис.18.7,б), причем
фронты этих импульсов, имеющих продолжительность
3
T
радиан, совпадают со значениями углов включения очередных
вентилей ММП.
Ток
п
i
, необходимый для формирования векторов
dqп
i
и
dqп
~
i
(см. формулы (18.50), (18.54)), находится из равенства:
dtduCiii
в
T
в
T
в
Tп1п
.
18.3.2.2. Гибридная математическая модель
Мощность сети переменного тока, к которой подключен сетевой
мост преобразователя частоты (СМП), может быть значительно
больше мощности вентильного двигателя. В этом случае
представляется возможным пренебречь собственным
сопротивлением сети и принять коммутацию вентилей СМП
мгновенной. Рассматриваемая ниже математическая модель
СМП, в которой вентили переключаются без взаимного перекрытия
и являются идеальными ключами, не требует использования
дифференциальных уравнений. В результате, сохранив основные
физические особенности работы вентилей СМП, оперируем с той
же системой дифференциальных уравнений (18.44), что и в случае
вентильного двигателя с одномостовым преобразователем.
Вентиль СМП (рис.18.8) с номером
6,...2,1
jj
считается
открытым при соблюдении следующих двух условий:
1) по цепи управления вентиля протекает отпирающий ток
(импульсы токов управления
j
i
у
следуют в функции угла
t
0
~
~
),
Рис.18.7. Структура матрицы
A
2
и ток управления шунтирующим
тиристором
а
б