Аракелян А.К., Афанасьев А.А. Вентильные электрические машины в системах регулируемых электроприводов. Том 2
Подождите немного. Документ загружается.

227
226
где
,1
1
экв
2
т
2
экв
1
экв
2
т
33
тэкв
TTTapTTTTapTaRa
22332
пт
pTpTpEab
- постоянные коэффициенты,
определяемые параметрами ВД и регулятора тока.
Решим (17.37) совместно с третьим уравнением системы
(17.31). Вычислив частный определитель, выведем
эc
K
по
возмущающему воздействию на двигатель. Определив модуль
,
1
1
2
3
p
3
pэкв
2
т
2
pэквэквт
2
p
2
эc
TTTTa
TTTTa
T
jK
(17.38)
и подставив значения резонансных частот демпфированных
колебаний
*
pII
,
*
pIII
для заданных
T
и
экв
T
, получим расчетные
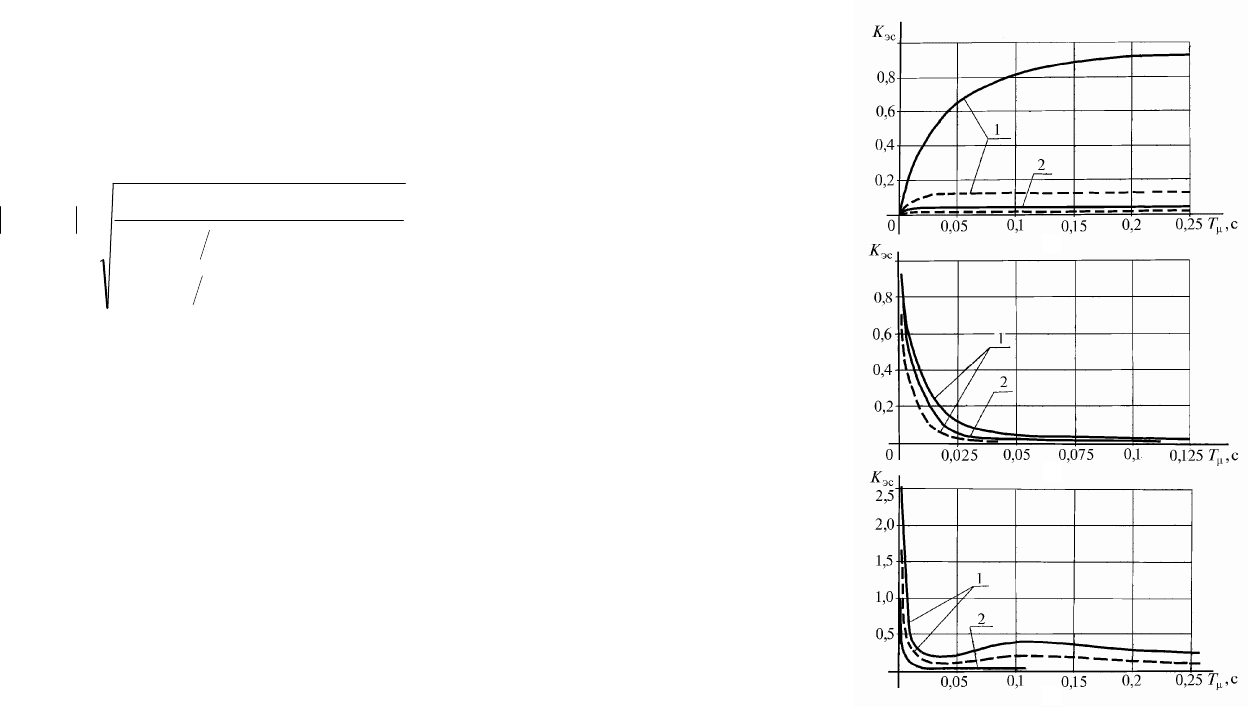
(рис.17.8, а).
При малых частотах (рис.17.8,а), т. е. в области возмущений,
где в разомкнутой САР имеет место интенсивное демпфирование
колебаний электроприводом (табл. 17.3), электромеханическая
связь значительно ослабляется при сравнительно малых значениях
некомпенсированной постоянной
T
. При
01,0
T
с и при егоо
увеличении демпфирующая способность ВД возрастает. Это
противоречит полученному (рис.17.7,в) результату, в САР с ИТ-СД
оптимизация контура тока приводит к замене звена (якоря ВД) с
большой инерционностью интегрирующим звеном с еще большей
постоянной времени. Для обеспечения оптимального
быстродействия по общепринятым критериям качества переходных
процессов при пуске САР с ВД необходима форсировка напряжения
якоря ВД, что достигается подбором (расчетом) относительно
меньшего значения некомпенсированной постоянной.
Оценим электромеханическую связь САР ДЭМС с ВД с
оптимизированным контуром скорости, реализуемым с помощью
тахогенератора, установленного на стороне электропривода.
Передаточная функция регулятора скорости для однократно
интегрирующей САР [388]
Рис. 17.8. Коэффициент электромеханической связи (
эc
K
) в
оптимизированной по быстродействию системе: а - при регулировании
тока якоря в функции малого параметра (
T
); б - при статическом
регулировании скорости двигателя в функции (
T
); в - то же при
астатическом регулировании скорости: 1 -
с;1,0
экв
T
2 - ;с175,0
экв
T
––––––
*
IIр
; - - - - -
*
рIII
а
б
в
229
228
Расчетные кривые
)(
эc
TK
(рис.17.8,б) показывают, чтоо
астатическая САР с ВД на базе типового СД также обладает
значительной электромеханической связью. Однако эта связь
несколько ниже, чем в аналогичной САР с ДПТ, из-за сравнительно
высокого значения эквивалентной электромагнитной постоянной
якорной цепи ВД.
Следовательно, если при синтезе САР с ВД для ДЭМС с
большой податливостью механического звена целесообразно
статическое регулирование скорости или токоограничивающей
характеристики с невысокой степенью точности, то в ДЭМС со
слабодемпфирующим механическим звеном желательно
астатическое регулирование скорости или момента.
В первом случае условия для демпфирования упругих
механических колебаний электрической частью и возникшие
колебания электропривода от управляющих воздействий
благоприятны, поэтому специальные меры по обеспечению
демпфирования сводятся к оптимизации регуляторов [501]. При
относительно малых
T
(меньших 0,01 с) возникают условия,
характерные для САР с жесткой электромеханической связью, в
которой демпфирование ослаблено вследствие чрезмерно жестких
механических характеристик ВД. Механические колебания в этом
случае не вызывают изменений скорости электропривода и отвода
энергии колебаний в якорную цепь, поэтому следует параметры
регуляторов подбирать такими, чтобы сумма некомпенсированных
постоянных САР была не меньше 0,01 с.
Выводы
1. Многомассовые электромеханические САР с ВД на базе
типовых СД в линейном приближении обладают большим диапазоном
возможных значений коэффициента электромеханической связи, в
каждом конкретном случае этот коэффициент может быть
рассчитан.
2. Область слабого демпфирования, как правило, охватывает
верхний диапазон регулирования, включая и критическую скорость
приводного двигателя, поэтому САР МЭМС с ВД по
быстродействию может быть оптимизирована на основе
pTaaRK
KTK
pW
cnэквjc
еомот
рc
, (17.39)
где а
с
- коэффициент, характеризующий демпфирование контура ско-
рости.
Пренебрегая внутренней связью ВД по ЭДС с членом второго
порядка оптимизированного замкнутого токового контура, получим
уравнение контура регулирования скорости:
pM
pTTTaK
E
pWK
11
эквмтот
0п
рcоc
.
Преобразование этого уравнения по известному методу дает
выражение комплексного коэффициента электромеханической
связи. Выделив модуль
эc
K
, имеем:
11
11
2
01
2
экв
22
т
2
01тc
эc
TTTa
TTaa
jK
М
М
.
Расчетные кривые
)(
эc
TK
(рис.17.8,б) показывают, что при
малых
T
существенно возрастает
)(
эc
TK
по сравнению с
эc
K
,
которое было получено с учетом значений, соизмеримых с
п
T
(рис.17.7,а). Это свидетельствует о том, что, как и для САР с
ДПТ или АД [429], уровень статизма регулировочных
характеристик ВД играет существенную роль в приобретении
определенных демпфирующих свойств.
Рассмотрим двукратно интегрирующую систему, т. е. астатиче-
скую систему регулирования. Учтем и внутреннюю обратную связь
ВД по ЭДС вращения [32]:
. 1
1
эквэкв10п
1
п
1
пртрc1оc
pTRppE
pTKpWpWpK
(17.40)
Решая (17.40) совместно с уравнением моментов из (17.31),
определим комплексный коэффициент
jK
эc
, модуль которого будет
1111
1
2
2
01
32
01
2
2
2
01
42
тc
2
01экв
2
тc
22
т
2
01тc
эc
TTT
TaaTTTaaTa
TTaa
jK
М
. (17.41)
231
230
2
01
*
cот
*-1
123
1
MKTMTJJc
ММ
;
2
01
*
c0
Mc
;
1
эквувхмо
*
MRKUKM
;
*1
0
SM
;
S
4
мН105,14
3
;
0схеомо
2
fad
ILKPKK
;
эквуотот
RKKK
;
-1
эквэквэкв
RLT
;
;
ядэкв
LLL
; 2cos33
2
1
1
я
qdqd
LLLLL
;
2
3
2
дэкв
qdd
LLLrrR
;
-2
моэкв
KRJT
М
;
1*
MMM
;
26
sin
2
0
tgMM
;0,3
*
д
L
;7636,1
**
aqad
LL
;1178,0
*
L
;8814,1
**
qd
LL
;0001,0
*
д
r
;1698,0
**
qd
LL ;0069,0
*
r
;23
1
сх
K
60,30
1
21
фи0п
36000
UE
В;
314
0
рад/с;
1
p (число пар полюсов СТД).
17.4. Синтез систем автоматического регулирования
с вентильным двигателем
Приведем математическое описание электромагнитных
процессов вентильного двигателя в неподвижной системе координат
и получим структурную схему, пригодную для анализа и синтеза
систем автоматического регулирования электропривода [32, 28]
Математическое описание электромагнитных процессов
выполним исходя из общеизвестных допущений, отмеченных в 17.1.
Для вентильного двигателя, бесконтактный коммутатор
которого выполнен по схеме инвертора тока [20], в качестве
переменных удобно принять токи отдельных контуров, тогда
система известных уравнений напряжений и потокосцеплений
примет вид
приведенного жесткого (одномассового) механического звена (т.е.
экв12
С
) известными методами.
3. Область существенной электромеханической связи в этих
САР охватывает область низкочастотного главного колебания,
поэтому передаточные функции регуляторов при последовательной
либо параллельной коррекции и место установки тахогенератора
рассчитаны и могут быть выбраны, например, по [429, 501, 532].
Приложение 17.4
Синхронный турбодвигатель 4000кВт;СТД
n
с
= 3000 об/мин;
22
мкг278 GD
;
15,0
в
d
м,
56,2
в
l
м. Питательный насос
кВт,3200ПЭН
22
мкг0,21 GD
(при рециркуляции), GD
2
=
= 54,0 кг
.
м
2
(при подаче),
11,0
b
d
м,
6,1
b
l
м. Тахогенераторор
ТГ-180П,
232
мкг102,1
GD
, зубчатая соединительная муфта -
22
мкг0,1 GD
,
мН10318,0
5
12
C
,
мН10288,5
6
3423
CC
,
с13,251
01
,
с1321
02
(без жидкости),
с1610
02
(с жидкостью),
эквМп
1
2
1
TTT
J
J
a
;
;
пэкв
1
2
2 М
TTT
J
J
a
эквотп
-1
12
2
01эквп
-1
1213
TKTTJJTTTJJJa
ММ
;
2
01эквп
-1
1214
TTTJJJa
М
;
2
01эквп
1
215
TTJJJa
;
2
010
а
;
*
c
*-1
121
MMTJJb
М
;
*
c
-1
122
MJJb
;
*
cп
*-1
1213
MTMTJJJb
М
;
2
01
*
c0
Mb
;
2
01
*
cэквп
-1
121
MTTTJJc
М
;
2
01
*
cэквп
-1
122
MTTTJJc
М
;
4
Базовыми являются общепринятые номинальные параметры СД.
233
232
(17.42)
где
1
- угловая скорость вращения гладкой составляющей
магнитного поля ВД.
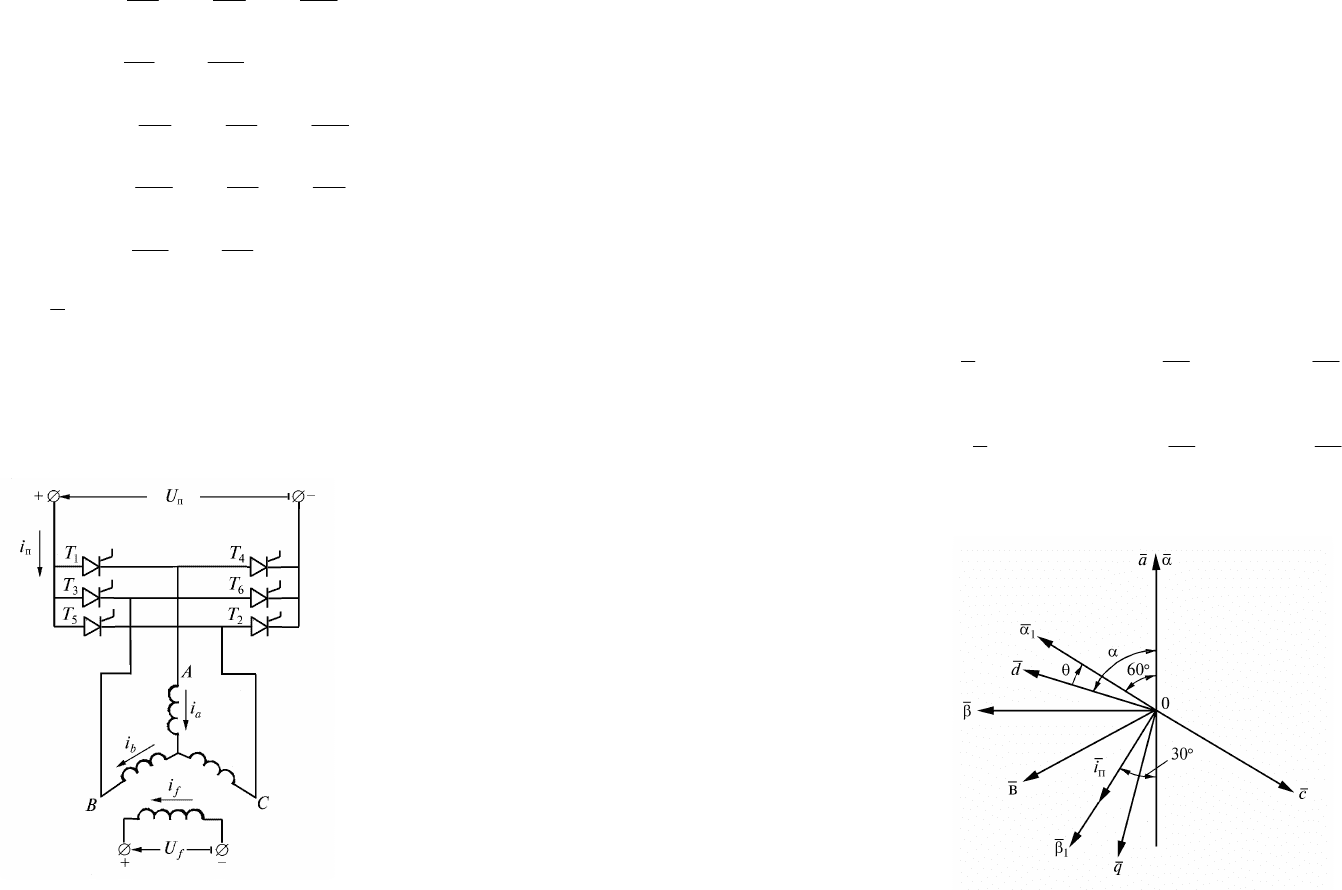
Анализ электромагнитных процессов проведем с учетом
дискретности вентильной части системы (рис.17.9).
Рассмотрим межком-
мутационный период.
Допустим, что проводят ток
тиристоры Т
1
, Т
6
, тогда
,0
;
;
п
п
c
в
a
i
ii
ii
(17.43)
где
п
i
- мгновенное значение
входного тока инвертора.
Взаимное положение в
пространстве осей ротора и
статора будем
характеризовать углом
(рис.17.10).
В начальный момент
р а с с м а т р и в а е м о г о
межкоммутационного периода для угла
справедливо равенствоо
0нач
30
,
где
- угол коммутации;
0
- начальный угол управления
инвертором, задаваемый датчиком положения ротора.
За время межкоммутационного периода ротор поворачивается
на угол
60
,
и к концу межкоммутационного периода угол
принимает значение
.90
0кон
Воспользовавшись формулами преобразования, осуществим
переход к неподвижной системе координат для переменных статора:
;
3
2
cos
3
2
coscos
3
2
cвad
iiii
.
3
2
sin
3
2
sinsin
3
2
cвaq
iiii
Подставив в эти равенства соотношения (17.43) и выполнив
Рис.17.10. К определению пространственного положения осей статора
и ротора
Рис.17.9. Упрощенная силовая
схема вентильного двигателя
,
2
3
;0
;0
;
;
;
1
1
dkqaqqkdfadqdqd
d
aq
kq
kqkqkq
f
ad
d
ad
kd
kdkdkd
kd
ad
d
ad
f
ffff
kdadddfad
kq
aq
q
qqq
kqaqqq
kd
ad
f
ad
d
ddd
iiLiiiLiiLLpM
dt
di
L
dt
di
Lir
dt
di
L
dt
di
L
dt
di
Lir
dt
di
L
dt
di
L
dt
di
LirU
iLiLiL
dt
di
L
dt
di
LriU
iLiL
dt
di
L
dt
di
L
dt
di
LriU
235
234
преобразования, получим
.cos
3
2
;sin
3
2
п
п
ii
ii
q
d
(17.44)
Здесь введено обозначение текущего угла:
.
3
Мгновенные значения фазных напряжений
.
3
2
sin
3
2
cos
;sincos
qdв
qda
UUU
UUU
(17.45)
Напряжение, подводимое к инвертору:
ba
UUU
п
.
Подставив в это уравнение соотношения (17.45) и выполнив
преобразования, получим
. cossin3
п
qd
UUU
(17.46)
Принимаем неподвижную систему координат
11
,
(рис.17.10),
одна из осей которой совпадает с результирующим вектором тока
якоря
п
i
. В этой системе координат взаимное положение в
пространстве осей ротора и вектора результирующего тока якоря
п
i
характеризуется углом
. За положительное направление
отсчета угловых положений принято направление, совпадающее с
угловой скоростью ротора. В этой системе координат ротор
принимается неподвижным, тогда результирующий вектор тока
якоря
п
i
перемещается относительно ротора со скоростью
1
с
обратным знаком.
В неподвижной системе координат дифференциальные
уравнения для контуров ротора из (17.42) принимают вид
.sin
3
2
cos
3
2
0
;cos
3
2
sin
3
2
0
;cos
3
2
sin
3
2
1п
п
1п
п
1п
•
iL
dt
di
L
dt
di
Lir
dt
di
LiL
dt
di
L
dt
di
Lir
dt
di
LiL
dt
di
L
dt
di
LirU
aq
aq
kq
kqkqkq
f
adad
ad
kd
kdkdkd
kd
adad
ad
f
ffff
Решая данную систему уравнений относительно производных,
получим
;cos
3
2
sin
3
2
1п
п
dt
di
L
L
i
L
L
dt
di
L
L
i
L
r
dt
di
f
kd
ad
kd
ad
kd
ad
kd
kd
kdkd
;sin
3
2
cos
3
2
1п
п
i
L
L
dt
di
L
L
i
L
r
dt
di
kq
aq
kq
aq
kq
kq
kqkq
. cos
3
2
sin
3
21
1п
2
п
2
2
kd
kd
ad
kd
kd
ad
ad
kd
ad
adfff
kdkdf
f
i
L
L
ri
L
L
L
dt
di
L
L
LriU
LLL
dt
di
(17.47)
Уравнение электромагнитного момента из (17.36) и уравнение
(17.46) с учетом (17.42), (17.44) и (17.47) принимают соответственно
вид
237
236
.sinctg1
3costg
sin2
2
3
2
3cos
sin22
2
2
2
2
1
п
2
2
2
2
2
п
2
2
2
2
2
2
2
п1п
kqkq
kq
aq
kdkd
kd
ad
f
kd
ad
ad
kd
ad
fff
kd
ad
f
kd
ad
ad
kqaqkdad
kq
aq
q
kd
ad
f
kd
ad
ad
kd
ad
dfad
kq
aq
q
kd
ad
f
kd
ad
ad
kd
ad
d
ir
L
L
ir
L
L
L
L
L
L
L
L
riU
L
L
L
L
L
L
iLiL
i
L
L
L
L
L
L
L
L
L
L
L
LiL
dt
di
L
L
L
L
L
L
L
L
L
L
L
LirU
(17.48)
. sincos
32sincos3
пп
2
пп
iiLiiL
piLLpiiLpM
kqaqkdad
qdfad
(17.49)
Уравнение (17.48) после преобразований можно представить в
виде
,sin
1
1
1
1
3cos3
2sincos322
1
11
ctg
tg
п
п
Шпп
kqkdkqkdkd
kdf
f
kd
fff
kdf
kdf
kqaqkdad
afad
irkir
kk
k
k
riU
kk
kk
iLiL
iLiL
dt
di
LriU
(17.50)
где
2cos
2
2
я
dqqd
LLLL
L
- индуктивность якоря дви-
гателя, абсолютное значение которой зависит от углового положе-
ния ротора;
;
f
ad
f
L
L
k
;
kd
ad
kd
L
L
k
kq
aq
kq
L
L
k - коэффициенты связи обмоткитки
возбуждения и демпферных контуров по осям d и q.
Индуктивность реакции якоря определяется по формуле
dqqda
LLLLL
3
или
.
1
11
2
kdf
fkdkdf
adqda
kk
kkkk
LLLL
При анализе и синтезе САР, которая выполнена по принципу
подчиненного регулирования, будем пренебрегать пульсациями
момента и скорости, обусловленными дискретностью переключения
тока в фазах якоря. Кроме того, будем полагать, что коммутация
тиристоров инвертора идеальная.
С учетом этих допущений осуществим переход в (17.49) и
(17.50) к средним значениям:
,2sin
2
2
cos
2
;22
0
2
п0п
дв
•
япп
Mi
LLpk
iiL
pk
M
e
dt
di
LriU
qdcx
fad
cx
(17.51)
где
0я
2cos
33
2
2
dqqd
LLLL
L
- среднее значение ин-
дуктивности якоря при заданном угле
0
;
дв
e
- среднее значение выпрямленной ЭДС вентильногоо
двигателя;
233
cx
k
- коэффициент схемы выпрямления для трехфаз-
ного мостового инвертора;
239
238
0п0п
sincos
2
iiLiiLp
k
M
kqaqkdad
cx
- составляющая
электромагнитного момента, обусловленная действием
демпферных контуров.
Для электрических машин с демпферной обмоткой можно
пользоваться упрощенной формулой при нахождении индуктивности
якоря:
.
2
я
qd
LL
L
Среднее значение выпрямленной ЭДС вентильного двигателя
можно представить в виде суммы отдельных составляющих:
тврa0дв
eeeee
;
010
cos
2
fad
cx
iL
k
e
;
01па
2sin
22
iL
k
e
a
cx
;
100вр
sincos
2
kdadkdad
cx
iLiL
k
e
;
,sinctg
1
1
1
1
2
00
т
kqkqkq
kdf
kdkdf
kdfff
kdf
kdf
cx
irk
kk
irk
kriU
kk
kk
k
e
,
где
0
e
- ЭДС холостого хода;
a
e
- ЭДС реакции якоря;
вр
e
- ЭДС вращения, обусловленная действием демпферной
обмотки;
т
e
- трансформаторная ЭДС.
Если полученные соотношения дополнить уравнением
движения и учесть, что напряжение к вентильному двигателю
подводится от управляемого выпрямителя, то будем иметь систему
дифференциальных уравнений, пригодную для анализа
электромеханических процессов:
,
;2sin
2
2
cos
2
;
cossin
2
0
2
п0п
твр
00п
п
эпэв
dt
d
JMM
Mi
LL
pk
iiL
pk
M
ee
iLiL
pk
dt
di
LiRe
c
qd
cx
fad
cx
afad
cx
(17.52)
где
в
e
- среднее значение ЭДС выпрямителя;
2
2
т
рдтэ
mx
rrrR
- эквивалентное сопротивление якорной
цепи с учетом сопротивления трансформатора (
т
r
), сглажи-
вающего дросселя (
д
r
) и эквивалентного сопротивления, учиты-
вающего коммутацию управляемого выпрямителя
2
т
mx
;
дтяэ
2 LLLL
- эквивалентная индуктивность якорной це-
пи с учетом индуктивности трансформатора (
т
L
) и
сглаживающего дросселя (
д
L
);
- угловая скорость вращения ротора.
Приведем (17.52) к операторной форме записи:
,
;2sin
2
2
cos
;2sin
22
cos1
0
2
п
п0м
твр0п
0епээв
pJppMpM
pMpi
LLpk
picpM
pepeppiL
pk
pcpipTRpe
c
qdcx
a
cx
(17.53)
241
240
где
е
c
,
м
c
- коэффициенты ЭДС, холостого хода и электромагнитно-
го момента,
fad
cx
iL
pk
cc
2
ем
;
э
T
- электромагнитная постоянная времени якорной цепи,
э
э
э
R
L
T
.
Таким образом, получена система дифференциальных
уравнений, по своей физической сущности близкая к
электроприводам с машинами постоянного тока, методика анализа
и синтеза которых достаточно разработана. На основании
полученных соотношений строится двухконтурная система
подчиненного регулирования (рис.17.11).
В приведенной схеме управляемый выпрямитель представлен
в виде линейного звена с коэффициентом усиления
в
k
и фильтромм
на входе с малой постоянной времени
T
.
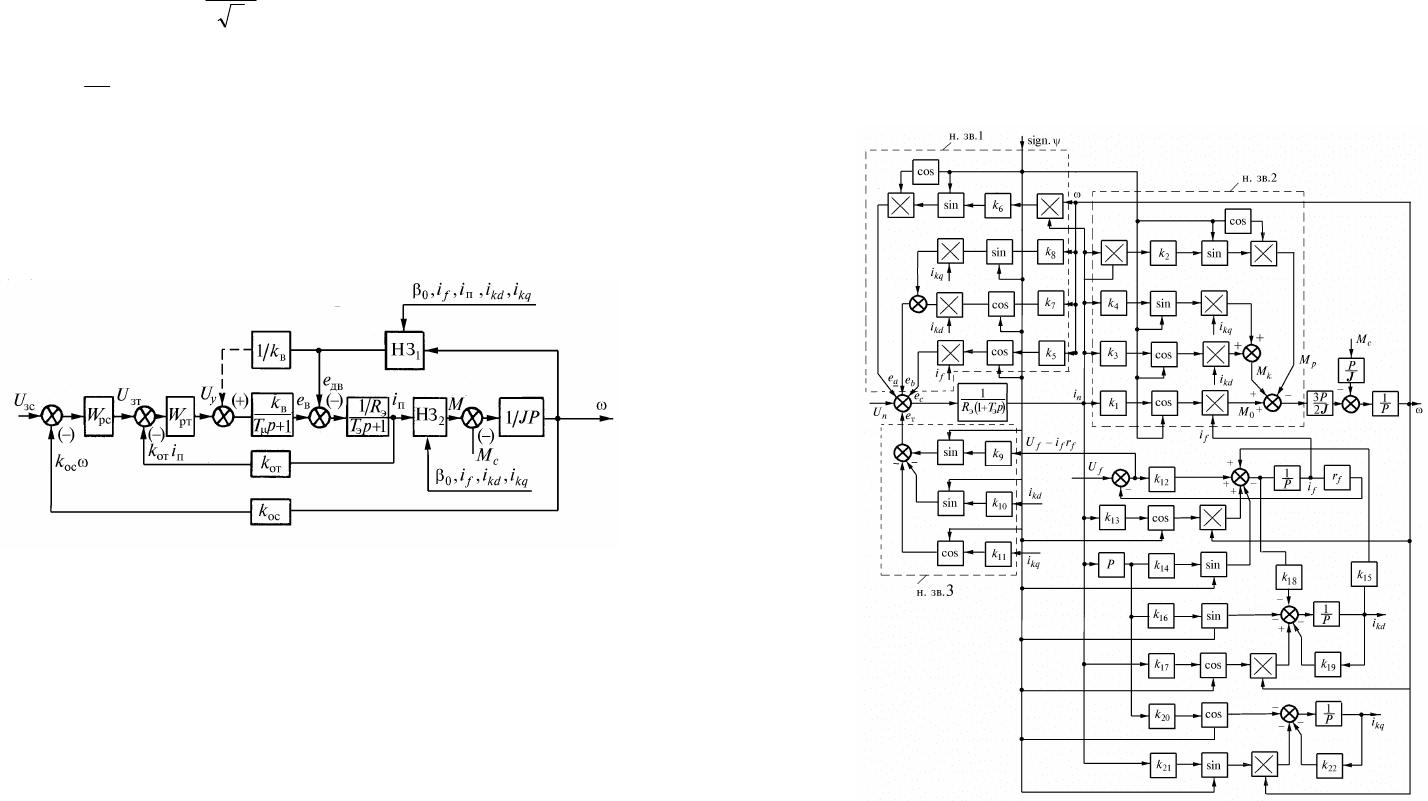
В исходной структурной схеме по модели рис.17.12 можно
выделить четыре звена: звено тока якоря
п
i
, звено тока обмотки
возбуждения
f
i
и звенья токов демпферной обмотки
kd
i
и
kq
i
.
В этой модели отсутствуют сильные перекрестные частотно-
зависимые связи между напряжением и ЭДС контуров якоря, а
собственные связи контуров обмоток ротора слабодействующие,
поскольку контурные коэффициенты
11
K
,
15
K
,
19
K
и
22
K
из-за
малых постоянных
kd
K
и
kq
K
проявляют себя в динамике
пренебрежимо слабо (см. прил. 17.5).
Рис.17.11. Структурная схема САР
Рис.17.12. Модель структурной схемы вентильного двигателя
в осях
, - неподвижных в пространстве: Т
э
- эквивалентная
электромагнитная постоянная входной цепи инвертора
Сильнодействующие связи между якорной обмоткой, обмоткой
возбуждения и демпферной обмоткой ротора особо проявляют себя
в динамике по аналогии с некомпенсированным двигателем
постоянного тока. Однако при малых установочных углах ДПР
(следовательно, при малых
1
sin
) влияние этих связей, как
показывает опыт, пренебрежимо мало. Поэтому с целью упрощения
и иллюстрации наглядности дальнейший анализ и синтез САР с ВД
243
242
в неподвижной системе отсчета ведется только по цепи якоря в
предположении, что компенсация реакции якоря осуществляется
автоматически путем компаундирования возбуждения входным
током инвертора, а действия нелинейных составляющих ЭДС и
электромагнитного момента в канале якоря ВД выражаются
реакциями нелинейных звеньев НЗ1 и НЗ2, вводимых в структуру
ВД. В вентильном двигателе в значительной мере проявляет себя
внутренняя обратная связь по ЭДС двигателя. Наиболее ярко это
наблюдается при реверсировании, когда изменяется угол управления
инвертором
0
. В связи с этим при оптимизации контура регулирова-
ния тока необходимо принимать меры по компенсации влияния внут-
ренней обратной связи по ЭДС двигателя.
Непосредственное измерение ЭДС вентильного двигателя
затруднено, поэтому целесообразно воспользоваться косвенными
методами. Довольно простое решение вопроса компенсации
внутренней обратной связи по ЭДС предложено в [165].
Воспользовавшись этой методикой, определим передаточную
функцию регулятора тока:
.
1
ээ
отв
2
т
т
рт
p
TR
kk
Ta
pTa
pW
Напряжение задания по току
зт
U
подается с выхода фильтра,
имеющего передаточную функцию:
1
1
т
ф
pTa
pW
,
где
TTa
тт
- коэффициент, характеризующий степень демпфи-
рования колебаний тока;
т
T
- постоянная интегрирования контура
тока.
Передаточная функция оптимизированного замкнутого
токового контура
.
11
1
э
22
т
от
зам
pTTaTpTa
k
pW
Расчет контура скорости осуществляется известными
методами. Нелинейное звено НЗ2 удобно представить в виде
упрощенной передаточной функции
,cos
0м
п
нз2
c
pi
pM
pW
которая может быть получена из (17.51) при пренебрежении
реактивной составляющей электромагнитного момента и
дополнительным моментом, вызванным действием демпферных
контуров (рис.17.12).
При определении передаточной функции регулятора скорости
следует принимать во внимание законы регулирования тока
возбуждения и угла управления инвертором.
Если скорость регулируется при поддержании постоянной
составляющей результирующего магнитного потока, действующего
перпендикулярно обобщенному вектору тока якоря, то
const,cos
м00м
cc
где
0м0
2
fad
cx
iL
pk
c
- коэффициент электромагнитного момента,
пропорциональный нормальной составляющей магнитного потока;
0f
i
- ток возбуждения двигателя при холостом ходе.
Для однократно интегрирующей системы передаточная
функция регулятора скорости принимает вид
,
тсэос
ме0от
ср
pTaaRk
Тсk
pW
где
сомо
э
м
cc
JR
Т
- электромеханическая постоянная времени;
с
a
- коэффициент, характеризующий демпфирование для конту-
ра скорости.
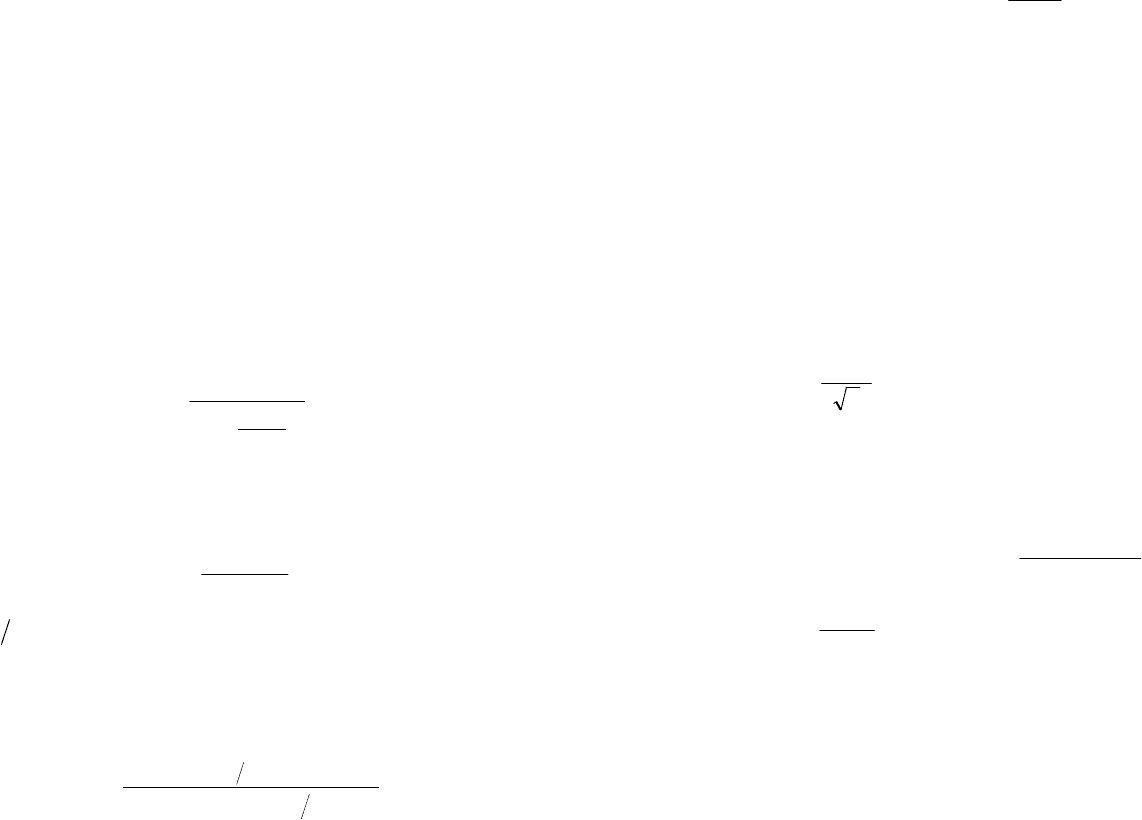
Для оптимизированной САР (рис.17.13) было проведено
исследование переходных процессов на аналоговой модели
(рис.17.14).
Проведенные исследования на аналоговой модели и
экспериментальной установке показали удовлетворительное
245
244
качество переходных процессов. Полученные соотношения были
использованы при разработке экспериментального электропривода
питательного насоса [28] (прил. 17.5).
Конструирование и синтез САР электропривода с ВД для
реализации режима пуска при условии задания алгоритма
переключения вентилей инвертора рассмотрены выше (см. гл. 7).
Расчет же параметров регулятора тока якоря ВД с учетом
прерывистости тока во входной цепи инвертора представляет
частный случай, требующий построения адаптивного регулятора
тока.
Рис.17.13. Упрощенная структурная схема САP
Рис.17.14. Осциллограмма переходных процессов пуска и реверсирования
двигателя
Приложение 17.5
Постоянные коэффициенты схемы рис. 17.11.
;
2
; ;
2
;
2
41321 aq
cx
qd
cx
ad
cx
PL
k
KKKLLP
k
KPL
k
K
;
;
2
5 ad
cx
L
k
K
;
1
)1()1(
2
2
6
kdf
fkdkdf
adqd
cx
KK
KKKK
LLL
k
K
;
12
)1(
;
2
;
9857
kdf
kdfcx
aq
cx
KK
KKk
KL
k
KKK
;
2
;
12
)1(
1110 kq
kqcx
kdf
fkdkdcx
r
Kk
K
KK
KrKk
K
; ;
3
2
;
1314
2
13
2
12
KK
LLL
LLL
K
LLL
L
K
adkdf
adkdad
adkdf
kd
; ; ;
3
2
;
18161716
2
15
kd
ad
kd
ad
adkdf
kdad
L
L
KKK
L
L
K
LLL
rL
K
; ; ; ;
3
2
;
2220212019
f
ad
f
kq
kq
kq
aq
ad
kd
L
L
K
L
r
KKK
L
L
K
L
r
K
; ;
kq
aq
kq
kd
ad
kd
L
L
K
L
L
K
где
kqkdf
KKK , ,
- коэффициенты связи обмотки возбуждения и
демпферных контуров ротора по осям d и q.