Аракелян А.К., Афанасьев А.А. Вентильные электрические машины в системах регулируемых электроприводов. Том 1
Подождите немного. Документ загружается.

331
330
6.4.6. Датчики тока
Для реализации оптимальных или близких к ним законов
управления ВД, а также для защиты коммутатора от чрезмерных
токов необходимо иметь обратную связь по току двигателя. Сигнал
обратной связи по току может сниматься как с пороговых датчиков
(релейного типа), производящих оценку входного сигнала по методу
"меньше-больше" (двухпозиционные) или "меньше-норма-больше"
(трехпозиционные), так и с аналоговых преобразователей входного
сигнала (см. рис. 6.2).
Пороговые датчики предназначены для выявления аварийных
режимов и используются, как правило, в схемах защиты ВД.
Основным требованием к ним является быстродействие.
Аналоговые датчики служат для получения выходного сигнала,
пропорционального текущему значению контролируемого тока
двигателя. Среди требований, предъявляемых к ним, можно
выделить следующие:
- линейность и высокая крутизна выходной характеристики;
- хорошая помехозащищенность;
- термостабильность;
- надежность гальванической развязки от силовых цепей ВД.
Традиционным способом реализации аналогового датчика тока
в мощных ВД является введение трансформаторов тока в
контролируемую цепь [100]. При этом, так как в большинстве
случаев информация о токе двигателя требуется в виде постоянного
напряжения, на выходе трансформаторов тока устанавливаются
выпрямитель и сглаживающий фильтр.
Недостатком такого способа являются большие габариты
трансформаторов тока, обусловленные требованием надежной
гальванической развязки выходных цепей датчика от силовой цепи.
Наличие в силовой цепи вентильных двигателей с НПЧ
сглаживающего дросселя, выполненного с воздушным зазором, дает
возможность контролировать ток двигателя нетрадиционным
способом, предложенным в работе [165]. Так как значение индукции
магнитного поля в зазоре сердечника дросселя в каждый момент
времени однозначно определяется током двигателя, то она может
быть использована в качестве модулирующего воздействия на
малой постоянной времени цепи разряда он успевает разрядиться
до окончания входного импульса. Во время формирования "полочки"
транзистор VT2 работает как нелинейное сопротивление,
осуществляя совместно со стабилитроном VD2 и резистором R3
стабилизацию тока управления. Благодаря этому амплитуда
импульса определяется уровнем стабилизации и не зависит от
колебаний напряжения питания и в определенном диапазоне от
величины сопротивления управляющего перехода тиристора VS1.
В момент окончания входного импульса t
n
транзистор VT1
закрывается и конденсатор С начинает заряжаться по цепи: "плюс"
источника питания - резистор R2 - динистор VD4 - переход база -
эмиттер транзистора VT2 - "минус" источника. По мере заряда
конденсатора формируется задний падающий участок импульса
управления, длительность которого t
n
определяется постоянной
времени цепи заряда. Благодаря наличию динистора VD4 падающий
участок обрывается на уровне тока удержания динистора I
0
, что
расширяет область рабочих частот устройства в сторону их
увеличения. Напряжение переключения динистора выбирается
несколько ниже напряжения источника, поэтому он не откроется
до тех пор, пока конденсатор С не разрядится до соответствующего
напряжения. Это обеспечивает защиту как от помехи по цепи
питания, так и от короткой помехи на входе транзистора VT1.
К достоинствам устройства наряду с высокой
помехоустойчивостью следует отнести значительно меньшие
массу и габариты используемых конденсаторов и импульсных
трансформаторов. Это объясняется тем, что через импульсный
трансформатор, размеры которого определяются длительностью
передаваемых импульсов, передается не весь импульс управления
тиристором (его длительность порядка 100 - 200 мкс), а только
короткий импульс, длительность которого определяет ширину
"полочки" и составляет всего 5 - 10 мкс.
Следует отметить, что гальваническая развязка выходных
каскадов от системы управления осуществляется с помощью
входных импульсных трансформаторов или оптронов, а друг от дру-
га - путем применения гальванически не связанных источников
питания для каждого каскада.
333
332
Достоинствами описанного способа построения ДТ являются:
- компактность и удобство конструктивного выполнения
датчика в виде отдельного блока, закрепленного на дросселе;
- значительно меньшие по сравнению с трансформаторным
датдатчиком масса и габариты;
- высокая помехозащищенность благодаря схемному решению
и минимальному расстоянию между измерительным органом
(датчиком Холла) и усилительно-преобразующей частью;
- линейность преобразования.
6.4.7. Датчики состояний вентилей
Датчики состояния вентилей (ДСВ) являются разновидностью
двухпозиционных пороговых датчиков тока (рис.6.33). Их
назначение - давать информацию о наличии или отсутствии тока
через отдельные вентили или группы вентилей коммутатора. Такая
информация, необходимая для реализации некоторых законов
управления (например, перевода вентильных групп в инверторный
режим), может быть получена как от трансформаторов тока, так и
от других устройств, срабатывание которых основано на протекании
через их элементы тока вентиля.
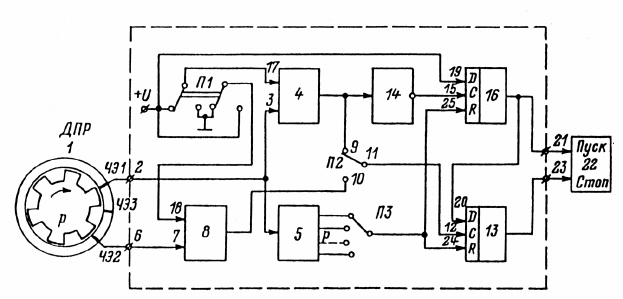
Рис. 6.33. Диаграммы, поясняющие работу датчика
состояния вентилей
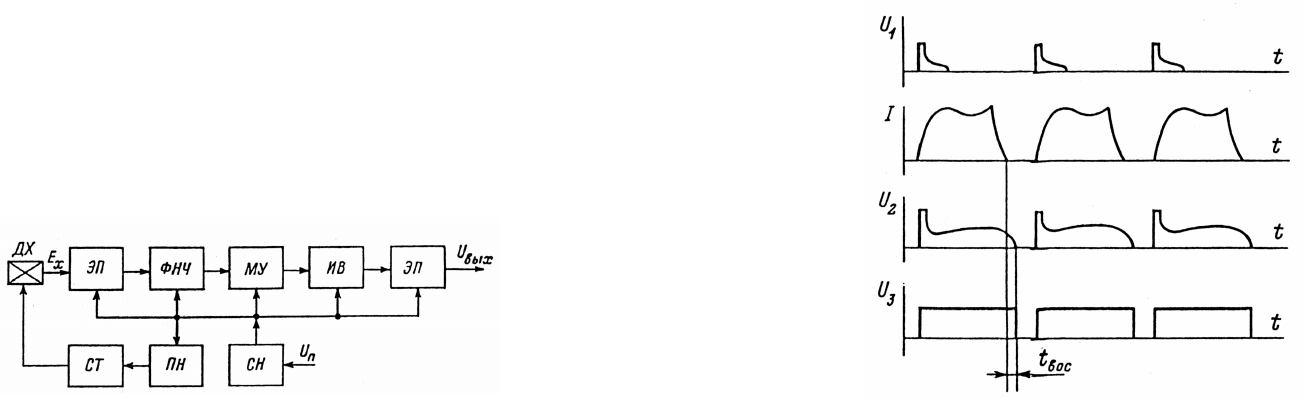
Рис. 6.32. Блок-схема датчика тока (ДТ)
датчик тока. Для этого чувствительный элемент датчика тока, в
качестве которого целесообразно использовать датчик ЭДС Холла,
помещается в воздушный зазор дросселя, а усилительно-
преобразующая часть, помещенная в экранирующий корпус,
располагается на сердечнике дросселя в непосредственной
близости от чувствительного элемента.
Блок-схема датчика тока представлена на pис.6.32.
Напряжение Е
х
с сигнальных выводов датчика Холла (ДХ)
поступает через эмиттерный повторитель (ЭП) на вход
низкочастотного фильтра (ФНЧ), обеспечивающего за счет
выделения первой гармоники в кривой входного напряжения
помехозащищенность устройства в условиях возможных помех. С
выхода ФНЧ сигнал поступает на масштабный усилитель (МУ) и
далее на схему измерительного выпрямителя (ИВ).
Сформированное напряжение выходного сигнала с выхода ИВ
поступает на выходной эмиттерный повторитель (ЭП),
обеспечивающий требуемую нагрузочную способность и
помехозащищенность информационного канала датчика тока. Так
как необходимым условием повышения точности преобразования
ДХ является гальваническая развязка холловских цепей от цепей
возбуждения, с одной стороны, и стабилизация тока возбуждения
датчика - с другой, то питание цепи возбуждения осуществляется
от автономного источника стабилизированного тока, состоящего
из трех блоков: стабилизации напряжения (СН), преобразования
напряжения (ПН) и стабилизации тока ДХ (СТ). В качестве
элементов Холла наиболее пригодными для измерительных целей
являются датчики серии ДХГ-05 и ДХК-14.
335
334
управляющем переходе тиристора при протекании тока через него;
U
3
- напряжение на выходе устройства.
Среди достоинств устройства следует отметить то, что после
прекращения тока через тиристор на его управляющем переходе
еще некоторое время будет оставаться напряжение, вызывая
увеличение длительности выходного сигнала U
3
на время t
вос
, таким
образом автоматически учитывается время, необходимое для
восстановления запирающих свойств тиристора, что повышает
надежность ВД.
Конструктивно ДСВ каждого тиристора выполняется на одной
плате с выходным каскадом СУ, заключается в экранирующий
корпус и размещается непосредственно в силовом тиристорном
блоке. Входные и выходные провода от блока к СУ скручиваются
и помещаются в экран. Такая конструкция обеспечивает
максимальную помехозащищенность.
6.4.8. Устройства контроля временных параметров
импульсных последовательностей
Необходимость обеспечения высокой точности сигналов с уст-
ройств синхронизации, датчиков положения ротора, фазосдвигающих
устройств и т. п. определила и повышенные требования к
контрольно-измерительной аппаратуре, используемой при их
настройке.
Так, например, при настройке ДПР необходимо измерять не
только длительность импульсов пауз сигналов с каждого
чувствительного элемента, но и относительные сдвиги передних
или задних фронтов сигналов от разных чувствительных элементов.
Более того, при настройке ДПР многополюсных ВД необходимо
учитывать, что сигнальный элемент имеет р секторов (р - число
пар полюсов электрических машин) и в силу технологического
разброса параметров последних сигнал с одного чувствительного
элемента ДПР от разных секторов будет иметь различную
длительность. Так как осуществить все эти измерения с помощью
известных методов, основанных на обработке осциллограммных
данных или измерении длительности импульсов стандартными
приборами, не представляется возможным, используется
специальная контрольно-измерительная система.
В коммутаторах циклоконверторного типа из-за большого
количества вентилей ДСВ ставятся, как правило, не на каждый
вентиль, а на ключи (тройки тиристоров), что несколько снижает
функциональные возможности системы управления.
Использование описанных ранее выходных каскадов управления
тиристорами с изолированными источниками питания позволяет
значительно упростить систему ДСВ, применив предложенное [165]
устройство для контроля состояния тиристоров.
Как известно, при протекании тока через тиристор на
управляющем электроде относительно катода появляется
напряжение порядка 0,4-0,5В (в зависимости от типа тиристора),
которое почти не зависит от величины тока. Это напряжение,
поступая на вход контролирующего состояние тиристора
устройства, усиливается и преобразуется в единичные импульсы,
поступающие через устройство гальванической развязки, в качестве
которого может быть использован оптрон или импульсный
трансформатор, в систему управления. Причем питание ДСВ и
выходного каскада, описанного в пункте 6.4.5, осуществляется от
одного и того же источника.
На рис.6.34 приведены диаграммы, поясняющие работу
описанного ДСВ. Здесь U
1
- напряжение, поступающее на
управляющий переход тиристора в виде коротких импульсов с
выходных каскадов СУ; I - ток через тиристор; U
2
- напряжение на
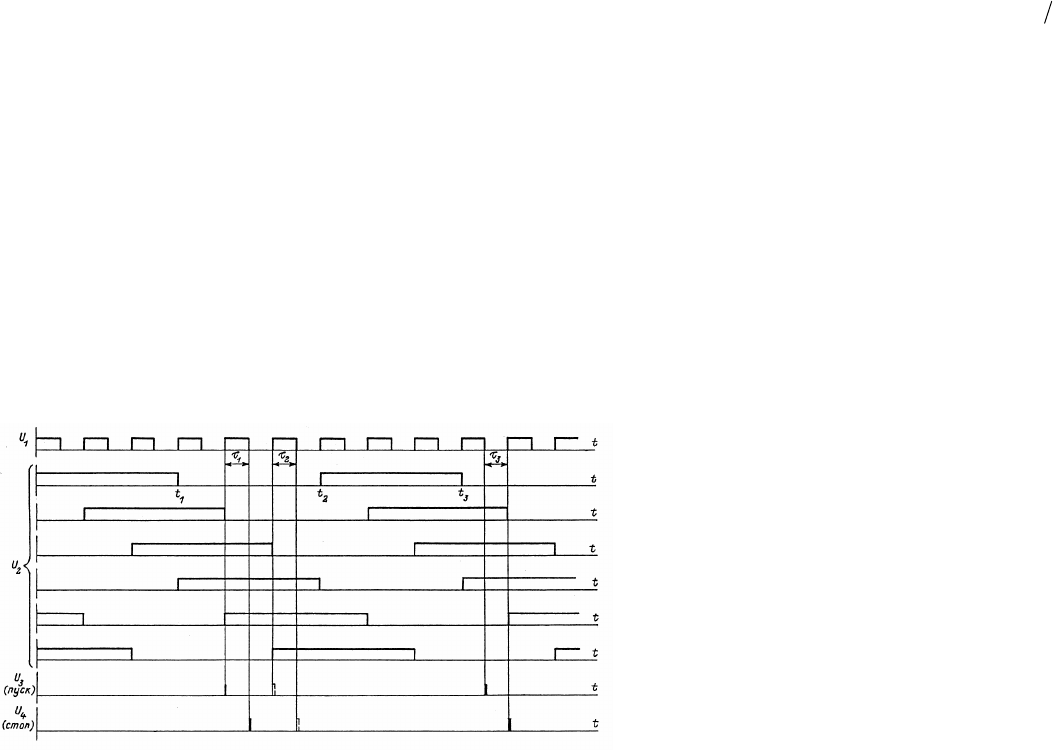
Рис. 6.34. Функциональная схема устройства контроля временных
параметров импульсных сигналов
337
336
"Исключающее ИЛИ" 4 и счетный вход счетчика 5. При указанном
положении П1 элемент 4 работает как инвертор. При этом на
командный вход 75 триггера 16 поступает прямой сигнал с ЧЭ1, а
на командный вход 12 триггера 13 - инвертированный сигнал.
Счетчик 5 работает в коде Либау-Крейга и делит частоту
следования импульсов f на число, равное р. Выход счетчика
выполнен р-канальным, причем в каждом последующем канале
сигнал U
2
с частотой
pf
сдвинут на 360/р эл. град. по отношению
к предыдущему. С помощью переключателя П3 один из каналов
соединяется с входами установки нуля 24 и 25 триггеров 13 и 16.
В те интервалы времени, когда сигнал на выходе переключателя
П3 равен логической единице, D-триггеры устанавливаются в
состояние логического нуля.
Как только напряжение U
2
на установочных входах 24 и 25
становится равным нулю (интервал времени t
1
-t
2
) , передний фронт
первого импульса U
1
, приходящего на командный вход 15 D-
триггера 16, устанавливает его в состояние логической единицы.
При этом фронт U
3
выходного сигнала триггера 16 запускает
измеритель временных интервалов 22, в качестве которого может
использоваться серийный цифровой частотомер в режиме
измерителя времени. Одновременно изменяется логический
уровень сигнала на информационном входе 20 триггера 13.
Задний фронт первого импульса U
1
с ДПР переводит триггер
13 в состояние логической единицы, при этом фронт U
4
его
выходного напряжения поступает на вход 23 измерителя 22,
прекращая процесс измерения.
Все последующие импульсы U
1
на временном интервале t
1
-t
2
не изменяют состояния схемы, поскольку неизменными остаются
логические уровни на информационных входах 19 и 20 D-триггеров.
Благодаря этому измеряется длительность
1
импульса U
1
,
соответствующего одному и тому же сектору сигнального элемента
ДПР.
Если переключением П3 на установочные входы 24 и 25
подается сигнал U
2
со следующего канала счетчика 5, то
происходит измерение длительности
2
импульса U
l
ДПР,,
соответствующего следующему сектору сигнального элемента.
Импульсы U
3
и U
4
для этого случая показаны пунктиром.
Рассмотрим работу устройства на примере контроля выходных
сигналов с ДПР с р-секторным сигнальным элементом, на роторе.
Функциональная схема устройства показана на рис.6.34, а
диаграммы, поясняющие его работу, - на рис.6.35. Устройство
содержит два D-триггера 13 и 16, два логических элемента
"Исключающее ИЛИ" 4 и 8, счетчик по модулю "р" 5, инвертор 14,
переключатели П1, П2 и П3 и измерительное устройство, например
цифровой измеритель временных интервалов. Выходы одного или
двух чувствительных элементов (ЧЭ1, ЧЭ2) ДПР 1 подключаются
к входным клеммам 2 и 6 устройства. Переключатель П1
позволяет контролировать либо длительность импульсов (левое
положение), либо длительность пауз (правое положение). Пере-
ключатель рода измерений П2 в положении 9 позволяет
контролировать длительность импульсов или пауз сигнала с одного
чувствительного элемента, а в положении 10 - сдвиг передних или
задних фронтов импульсов с двух разных чувствительных
элементов.
Сначала рассмотрим работу устройства, когда переключатель
П1 на-ходится в левом положении, а переключатель П2 в положении
9. При этом измеряется длительность импульсов с ЧЭ1. Приводной
двигатель вращает сигнальный элемент ДПР. Сигнал U
1
с частотой
f с клеммы 2 поступает на вход 3 логического элемента
Рис. 6.35. Диаграммы, поясняющие работу устройства по рис. 6.33
338
Для измерения паузы
3
между импульсами U
1
вход 17
логического элемента "Исключающее ИЛИ" 4 с помощью П1
подключается к общей шине источника питания. При этом на
командный вход 75 триггера 16 поступает инвертированный сигнал,
а на командный вход 12 триггера 13 - прямой. Диаграммы при
измерении паузы
3
показаны на интервале времени t
3
-t
4
.
Таким образом, устройство позволяет контролировать тех-
нологические погрешности каждого сектора сигнального элемента
ДПР в отдельности и с большой точностью, определяемой в
основном стабильностью частоты вращения приводного двигателя
и разрядностью цифрового измерителя временных интервалов.
Для контроля сдвига фронтов импульсов с разных
чувствительных элементов переключатель П2 устанавливают в
положение 10, когда с входом 12 триггера 13 связан выход
логического элемента "Исключающее ИЛИ" 8, что соответствует
измерению сдвига фронтов импульсов, поступающих на входную
клемму 6 с ЧЭ2, относительно фронтов импульсов с ЦЭ1,
поступающих на клемму 2 устройства. Показанное на рис.6.33
положение переключателя П1 соответствует режиму измерения
сдвига передних фронтов импульсов. Для измерения сдвига задних
фронтов П1 устанавливают в другое положение. Работа устройства
в обоих этих режимах аналогична описанной выше.
Для измерения сдвига фронтов сигналов от другого сектора
сигнального элемента переключатель П3 следует перевести в
соответствующее этому положение.
339
Г л а в а с е д ь м а я
КОММУТАЦИЯ TOКA В ВЕНТИЛЬНОМ ДВИГАТЕЛЕ
С ЗАВИСИМЫМ ИНВЕРТОРОМ ТОКА
7.1. Общие замечания
Одой из разновидностей вентильных двигателей постоянного
тока является вентильно-машинный комплекс, выполненный на
основе синхронной машины и зависимого инвертора.
Нормальный режим работы вентильного двига теля
сопровождается периодически повторяющимися короткими
замыканиями фаз обмотки якоря через одновременно открытые
вентили инвертора. За время этих замыканий, называемых
коммутационными, осуществляется, как и в машинах постоянного
тока с механическим коллектором, перевод постоянного тока
(входного тока инвертора) из одной фазы (секции) обмотки якоря
в другую.
Устойчивость рассматриваемого двигателя в статических и
динамических режимах определяется не только перегрузочной
способностью синхронной машины, но и коммутационной
устойчивостью преобразователя, которая в свою очередь, также
зависит от параметров используемой машины. Точный анализ
коммутационного короткого замыкания при наличии высших
гармонических в токе якоря даже в статическом режиме
достаточно затруднителен, особенно при работе двигателя на
низких частотах, когда потокосцепления контуров ротора за время
между двумя смежными коммутациями успевают существенно
измениться.
В настоящей главе исследуется коммутационный процесс с
учетом активных сопротивлений всех обмоток синхронной
машины. Анализ производится применительно к двигательному
режиму машины, но предлагаемый метод и полученные
результаты легко могут быть распространены и на генераторный
режим.
340
341
6 0
о
60
о
iU
I
п
U
п
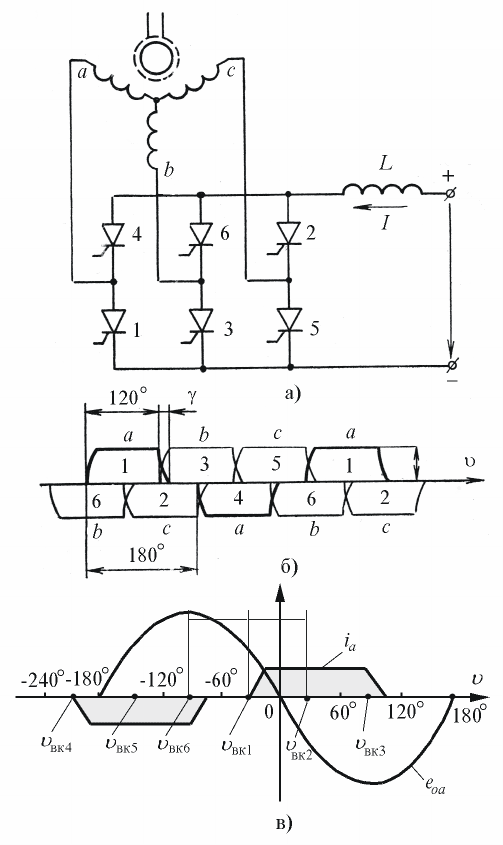
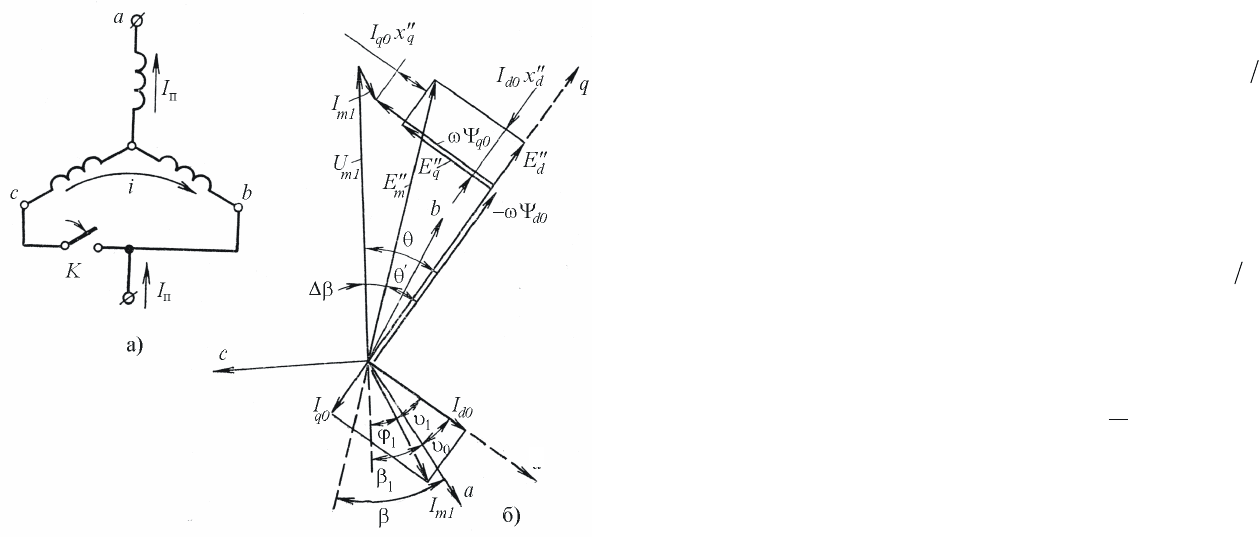
Рис. 7.1. Трехфазный мостовой инвертор тока с естественной
коммутацией, работающий на синхронный двигатель (вентили 1, 2, 6
открыты) (а), диаграмма линейных токов инвертора при идеальном
сглаживании (б) и углы включения тиристоров(
-угол между
магнитной осью фазы а статора и продольной осью d ротора)
7.2. Физическая картина процесса коммутации и его
качественный анализ
При питании синхронного двигателя от трехфазного мостового
зависимого инвертора (рис.7.1,а) наблюдаются циклические
(периодически повторяющиеся) короткие замыкания двух фаз через
два одновременно открытых вентиля. Вентили, имеющие общие
аноды, составляют анодную группу (четные имеющие общие аноды,
составляют анодную группу (четные вентили рис.7.1,а). Вентили с
общими катодами (нечетные) образуют катодную группу.
Вентили каждой группы сменяют друг друга в работе по
круговой системе, циклически. Например, для анодной группы после
прекращения работы вентиля 4 открывается вентиль 6, затем 2 и
вновь 4 и т. д.
При пренебрежении временем коммутации каждый вентиль
находится в работе 120°. Аналогичная картина наблюдается и для
катодной группы, но с тем отличием, что начало работы каждого
вентиля смещается относительно момента включения
противолежащего вентиля другой группы (принадлежащего той же
фазе) на 180°. Например, вентили 1 и 4 работают со сдвигом в 180°.
На временной диаграмме рис.7.1,б показана очередность и
длительность работы вентилей. Жирно очерченная кривая
показывает интервалы работы вентилей фазы а (вентили 1 и 4).
При достаточно большой индуктивности сглаживающего
дросселя L фазные токи будут иметь в первом приближении форму
прямоугольных импульсов. В промежутке времени между двумя
коммутациями находятся в работе два, а во время коммутации -
три одновременно работающих вентиля. На рис.7.1,а изображен
случай, когда при открытом вентиле 1 катодной группы происходит
перевод тока вентиля 6 на вентиль 2 анодной группы. Угловое
положение оси ротора d относительно магнитной оси фазы а
характеризуется в момент включения вентиля 2 углом
вк2
(рис.7.1,в). Открытые вентили 2 и 6 закорачивают фазы b и с
между собой. Затем в катодной группе будут переключаться
вентили 1 и 3 (короткое замыкание фаз а и b) и т. д.
В контуре коммутации под действием ЭДС обмотки якоря
возникает ток короткого замыкания (ток коммутации), который за
342
343
время коммутационного процесса уменьшает ток заканчивающей
работу фазы до нуля и увеличивает ток вновь вступающей в работу
фазы до значения входного тока инвертора.
7.3. Ток коммутационного короткого замыкания.
Предельные значения тока якоря по условиям
коммутации
Рассмотрим коммутационное короткое замыкание двух фаз вен-
тильного двигателя, полагая, что пульсации тока во входной цепи
инвертора отсутствуют (
L
). На рис.7.2,а изображена схемаа
включения обмотки якоря в промежутке времени, когда ток
пропускают две фазы а и b, причем фаза b заканчивает работу и
должна включаться фаза с. Выключатель K в момент начала
d
Рис. 7.2. К расчету коммутационного короткого замыкания:
а -расчетная схема; б - диаграмма изображающих векторов двигателя
коммутации замыкается. Угловое положение оси ротора d
относительно магнитной оси фазы а обмотки якоря характеризуется
в указанный момент углом
вк20
(рис.7.1, в).
Непосредственно перед коротким змыканием (началом
коммутации) имеем:
.0
;
;
п
п
c
b
a
i
Ii
Ii
(7.1)
После замыкания выключателя К
;
;
;
п
п
ii
iIi
Ii
c
b
a
(7.2)
02
п
dtdrIriuuu
bcaabc
, (7.3)
где r - активное сопротивление фазы обмотки якоря;
a
u
- падение напряжения в открытом вентиле;
i - мгновенное значение тока коммутации;
п
I
- входной ток инвертора;
bc
- полное потокосцепление фаз b и с обмотки якоря.
Интегрируя (7.3) в пределах от 0 до
, получаем
bcbcbc
0
, (7.4)
где
0bc
- потокосцепление фаз b и c в начальный момент короткогоо
замыкания;
, 2
0
п
diIr
bc
(7.5)
0
(
0
- угол между осью ротора d и осью фазы a);
- угловая частота основной гармоники выходного напряжения
инвертора.
344
345
В системе координат d, q, 0 выражение (7.4) примет вид
,cossin3
qdbc
(7.6)
причем потокосцепления эквивалентных обмоток d и q (81) могут
быть найдены в соответствии с уравнениями
,
;
qqq
q
ddd
d
xie
xie
(7.7)
где
d
e
,
q
e
- сверхпереходные ЭДС обмотки якоря по осям d и q,
наводимые магнитным потоком воздушного зазора, без части этого
потока, созданной обмоткой якоря и замыкающейся по путям рас-
сеяния обмоток ротора;
d
i
,
q
i
- токи эквивалентных обмоток якоря
d и q.
При пренебрежении активными сопротивлениями обмоток
ротора в соответствии с принципом постоянства потокосцеплений
сверхпереходные ЭДС остаются неизменными в переходном
процессе и в установившемся режиме с несинусоидальным током
обмотки якоря. Однако при работе вентильного двигателя на
сравнительно низкой частоте допущения об отсутствии активных
сопротивлении обмоток ротора и постоянстве потокосцеплений
становятся неприемлемыми. В этом случае необходимо учитывать
факт непостоянства сверхпереходных ЭДС.
В установившемся режиме работы вентильного двигателя,
потокосцепления и токи эквивалентных обмоток якоря d и q, кроме
постоянных во времени составляющих будут содержать и
переменные, обусловленные высшими гармоническими токов
d
i
и
q
i
:
;
;
0
0
qqq
ddd
(7.8)
,
;
0
0
qqq
ddd
iIi
iIi
(7.9)
где
0000
;;;
qdqd
II
- постоянные составляющие, обусловленные
первыми гармониками тока якоря и поля возбуждения, причем
.
;
0
0
00
0
qq
q
mdd
d
Ix
EIx
(7.10)
Разложив токи
d
i
и
q
i
в ряд Фурье
,Re
;Re
0
0
ktj
k
qkqq
ktj
k
dkdd
eIIi
eIIi
(7.11)
найдем, что
,Re
1
;Re
1
k
ktj
qkqq
ktj
k
dkdd
eIkjx
eIkjx
(7.12)
где
kjxkjx
qd
,
- операторные сопротивления синхронной ма-
шины по осям d и q, взятые при kjp
.
Подставив уравнения (7.8) - (7.12) в (7.7), получим
,
;
qqqq
q
dddd
d
ixteE
ixteE
(7.13)
где
;
00 dddmd
IxxEE
0qqqq
IxxE
- сверхпереходные
ЭДС, обусловленные основными гармониками тока якоря и поля
возбуждения; они остаются неизменными в установившемся
режиме работы вентильного двигателя;
,Re
;Re
k
ktj
dqqq
k
ktj
dddd
eIxkjxte
eIxkjxte
– (7.14)
346
347
– переменные составляющие сверхпереходных ЭДС, обусловлен-
ные токами высших гармонических.
При пренебрежении активными сопротивлениями обмоток
ротора следует принять
;
dd
xkjx
.
qq
xkjx
В этом частном случае
.0
tete
qd
Пользуясь известными соотношениями
,
3
2
sin
3
2
sinsin
3
2
;
3
2
cos
3
2
coscos
3
2
cbaq
cbad
iiii
iiii
(7.15)
из (7.2) находим, что для рассматриваемого коммутационного
интервала
.cos2
3
1
sin
;sin2
3
1
cos
пп
пп
IiIi
IiIi
q
d
(7.16)
Уравнение (7.6) с учетом (7.13), (7.16) запишется в виде
.cossincossin2
3
1
cossin
3
п
22
п
IxxxxIi
teEteE
qdqd
qqdd
bc
(7.17)
Пренебрегая активным сопротивлением обмотки якоря (при
мощностях около сотен киловатт и выше оно примерно в 10 раз
меньше индуктивного сопротивления рассеяния), для
коммутационного короткого замыкания из (7.4) и (7.17) получаем
.cossincossin
3
1
cos
sin
33
п000
2
0
2
0
0
0
00
Ixxxx
eE
eE
qdqd
qq
dd
bcbc
(7.18)
В вентильных двигателях малой мощности, а также при работе
с частотой значительно ниже номинальной активное сопротивление
обмотки якоря относительно велико и оказывает заметное влияние
на токи коммутации. Вывод соответствующих уравнений для
случая
0
r
дан в конце настоящего параграфа.
Из совместного решения уравнений (7.17) и (7.18) найдем
мгновенное значение тока коммутации
,
3
1
cossin
coscossinsin
2
3
п0
22
000
Ihxxe
xx
eEE
i
qd
qd
qd
(7.19)
где
,62sin62sin
0
h
k
tkjtkj
ekjAekjAe , Re
1
2
1
1
k
kjAkjAe , Re
210
.
22
;
22
0
0
2
1
j
qk
qq
dk
dd
j
qk
qq
dk
dd
eI
xkjx
I
j
xkjx
kjA
eI
xkjx
I
j
xkjx
kjA
(7.20)