Аракелян А.К., Афанасьев А.А. Вентильные электрические машины в системах регулируемых электроприводов. Том 1
Подождите немного. Документ загружается.

311
310
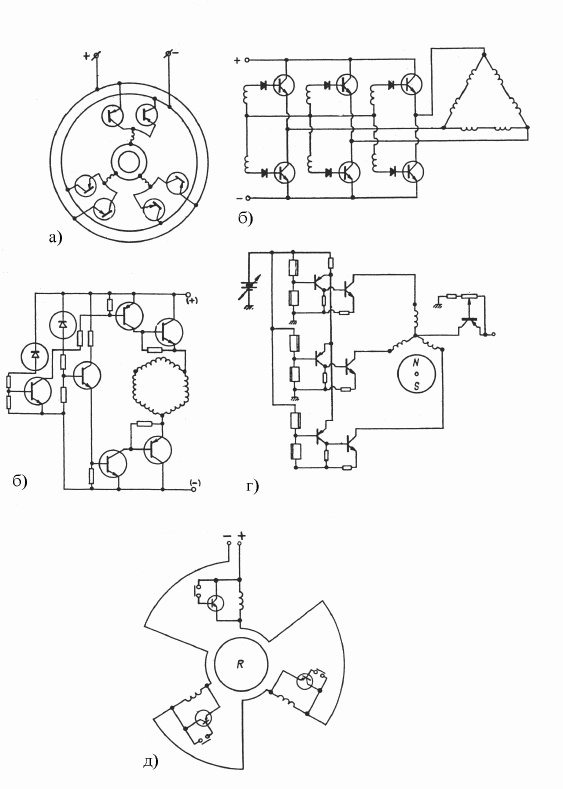
Рис. 6.23. Транзисторные коммутаторы
образом - в обратном направлении. В каждый данный момент вре-
мени работают два выпрямительных устройства. На рис.6.22,б
показаны формы подводимого напряжения
1
e
, ЭДС статора
s
e
и
тока в фазе i. Напряжение, подводимое к фазе, является
прерывистым и переменным по знаку в соответствии с формой
кривой ЭДС статора. Это напряжение непрерывно и постоянно по
знаку в течение времени, равного 2/3 полупериода частоты ЭДС
статора. Затем наступает пауза, равная 1/3 полупериода. После
этого следует перемена знака напряжения и снова период
непрерывного приложения напряжения. ЭДС статора
s
e
синусоидальна при холостом ходе. Эта же кривая является
характеристикой магнитного поля ротора. Ток фазы статора i
протекает в течение 2/3 периода ЭДС статора. Из-за индуктивно-
сти тока проводящего контура (обмоток двигателя и
трансформатора) ток затягивается на угол
, вследствие чего
снижается вращающий момент. Последнее может быть легко
компенсировано сдвигом тока в сторону опережения при помощи
управления СИФУ.
Возможные отказы выпрямительной установки одной из фаз
не отражаются на работе других фаз, так как фазы питаются
отдельно и между ними отсутствует электрическая связь. В
обычных схемах вентильного двигателя нарушение коммутации
тока вызывает сначала короткое замыкание между двумя фазами,
а затем и между тремя и полный выход из строя двигателя. В
описанной схеме наиболее вероятно возникновение отказа только
в одной фазе, и вся установка может продолжать работать.
Транзисторные коммутаторы. Результаты работ по транзи-
сторным коммутаторам, соответственно вытекают из трудов [70,
74, 100, 116, 154, 179]. На рис. 6.23, а показана принципиальная
схема, а на рис.6.23,б - одна из ее возможных реализаций.
Модификации в основном касаются только способов получения
команд на переключение фаз (рис.6.23,в) или построения цепей
кольцевой коммутации. В последнем случае (рис.6.23, г), например,
транзисторы работают в режиме эмиттерного повторителя,
задающего потенциал общей точки всех обмоток статора. Весьма
интересный вариант схемы, представлен на рис.6.23,д. Идея
построения схемы по такому принципу может оказаться
перспективной также и при тиристорном управлении.
Можно предположить, что развитие принципа построения
схемы, показанного на рис. 6.23,д, может оказаться полезным также
и для схем управления асинхронными двигателями.
313
312
снятия перенапряжений с тиристоров T
2
-T
6
в момент переключения
обмоток управления двигателя.
Резисторы R
3
, R
4
и конденсаторы С
3
, С
4
образуют диффе-
ренцирующие цепочки для формирования импульсов управления
тиристорами Т
1
, Т
2
.
Питающее напряжение подается на обмотки 2-5. Среднее
значение напряжения питания изменяется с изменением угла
включения тиристоров Т
1
, Т
2
, которое осуществляется за счет тока,
протекающего по управляющим обмоткам W
3
, W
4
магнитного
усилителя. Ток в обмотке W
4
изменяется с изменением скорости
вращения ротора, т.е. частоты следования управляющих импульсов,
поступающих на управляющие электроды тиристоров Т
3
-Т
6
. Когда
частота следования импульсов равна нулю, в обмотке W
4
ток не
протекает, угол включения тиристоров Т
1
, Т
2
максимален.
С поступлением управляющего импульса на управляющий элек-
трод первого тиристора Т
3
, в момент переключения обмотки 2
двигателя за время переходного процесса через обмотку W
4
,
проходит импульс тока, обусловленный ЭДС самоиндукции обмотки
2. Этот импульс вызывает уменьшение угла включения тиристоров
T
1
, T
2
и увеличение среднего значения напряжения питания.
При малых частотах следования управляющих импульсов
протекание тока через обмотку магнитного усилителя W
4
носит
импульсный характер.
При увеличении частоты следования управляющих импульсов
через обмотку магнитного усилителя W
4
, начиная с некоторого
момента, протекает постоянная составляющая тока. Угол
включения тиристоров еще больше уменьшается и среднее значение
напряжения питания увеличивается.
Обмотка магнитного усилителя осуществляет отрицательную
обратную связь по напряжению, что увеличивает жесткость
механической характеристики вентильного двигателя в
электроприводе на границах диапазона регулирования скорости.
Таким образом, совместное действие обмоток магнитного
усилителя W
3
и W
4
позволяет автоматически так изменять
питающее напряжение, что обеспечивается постоянство
электромагнитного момента на валу двигателя во всем диапазоне
регулирования скорости.
Для транзисторных схем электропривода с вентильным
двигателем могут оказаться полезными варианты схем из работы
[100], предназначенные для устранения механических вибраций
транзисторного электропривода с вентильным двигателем,
обусловленных крутыми фронтами диаграмм тока обмоток статора
двигателя, коммутируемых транзисторами. Система включает в
себя источник постоянного напряжения; ряд фазных обмоток
статора с последовательно включенными транзисторами; датчики
углового положения ротора, определяющие момент коммутации
транзисторов; устройство сглаживания фронтов временных
диаграмм - токов статора.
Последнее построено на демпфирующих конденсаторах,
подключаемых параллельно переходу эммитер-коллектор каждого
коммутирующего транзистора, или на реакторах, последовательно
подключаемых к источнику и стабилитрону, селективно
шунтирующему нагрузочные цепи транзистора.
Система регулирования скорости включает диодный
выпрямитель, обеспечивающий выпрямление противо-ЭДС
обмоток статора при быстрых коммутациях, сравниваемой затем
с эталонным сигналом.
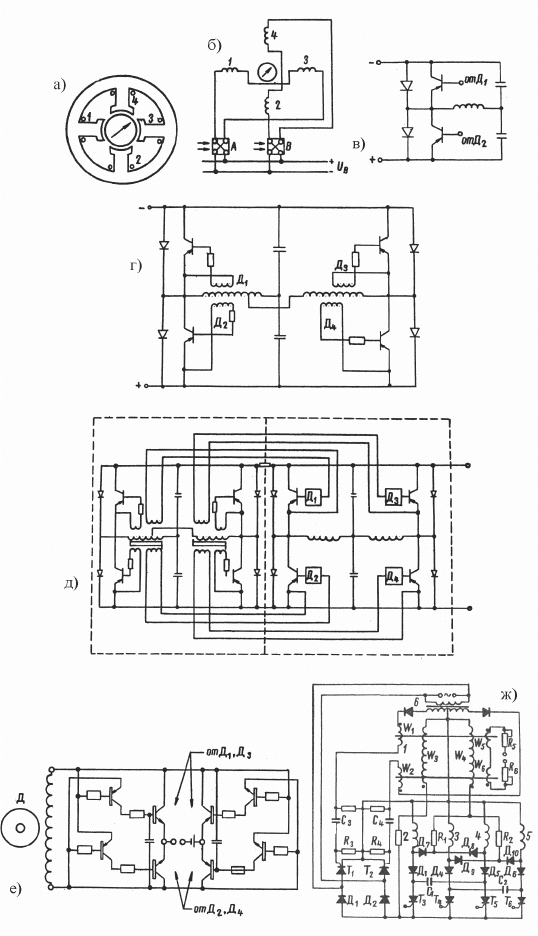
Особенности преобразователей для двух- и
четырехполюсных вентильных двигателей. Коммутатор, как
совокупность ключей А и В (рис.6.24,б), для двигателя по рис.6.24,а
выполнен с помощью транзисторно-диодных блоков. Транзисторные
варианты схем управления подобными двигателями представлены
на рис.6.24,в,г,д. Вариант транзисторной схемы, основанной на
совместном использовании транзисторов различных типов (n-р-n и
р-n-р), представлен на рис.6.24,е (Д - датчик).
Тиристорный коммутатор по схеме 6.24,ж содержит вы-
прямительную схему на тиристорах T
1
, Т
2
- и диодах D
1
, D
2
;
магнитный усилитель 1 с рабочими W
1
, W
2
и управляющими. W
3
W
4
обмотками, осуществляющими широтно-импульсное управление
тиристорами Т
1
и Т
2
, и обмотками смещения W
5
, W
6
; тиристоры T
3
-
T
6
, включенные последовательно с диодами D
3
-D
6
и с обмотками
управления 2-5; коммутирующие конденсаторы С
1
,С
2
. Кроме того,
предусмотрены резисторы R
1
, R
2
и диоды D
7
-D
10
, необходимые для
315
314
Представляют интерес также варианты схем с
использованием преобразователей положения, основанных на
магнисторах и датчиках Холла [168].
Наконец, существуют коммутаторы на герконах, которые в общих
чертах аналогичны описанным выше. Экспериментально проверенные
варианты схем основаны на применении герконов МУК-2.
6.4. Элементы информационного канала управления
электропривода с вентильным двигателем
6.4.1. Выбор структуры системы управления
Обеспечение требований, предъявляемых к вентильному
двигателю как основному силовому элементу автоматизированного
электропривода, во многом определяется функциональными
возможностями и качеством его коммутатора, важным составным
элементом которого наряду с силовым полупроводниковым
преобразоватслем является система управления.
Система управления ВД в общем случае необходима для
выполнения коммутатором следующих функций (см.рис.6.2):
- плавный пуск двигателя и обеспечение заданного темпа
разбега в пределах допустимого перерегулирования скорости;
- регулирование в широком диапазоне и стабилизация частоты
вращения двигателя в пределах длительного времени;
- возможность реверса и торможения с рекуперацией энергии
в сеть;
- обеспечение высоких энергетических показателей за счет
оптимальных законов управления;
- диагностика и защита важнейших элементов преобразователя
(коммутатора) двигателя в аварийных режимах и т. д.
Очевидно, что обеспечение всех перечисленных функций
наряду с выполнением требований по повышению надежности,
снижению стоимости и улучшению массогабаритных показателей,
является сложной и весьма противоречивой задачей. Поэтому при
проектировании САР с ВД следует соизмерять сложность СУ с
кругом решаемых двигателем задач.
В простейших случаях, когда основными критериями являются
надежность и невысокая стоимость, выбирается простейшая
Рис. 6.24. Типовые схемы коммутаторов для двух- или
четырехполюсных вентильных двигателей
317
316
6.4.2. Устройства синхронизации с сетью
Устройства синхронизации (УС) предназначены для син-
хронизации всех блоков СУ напряжением сети. Для этого, как
правило, входы УС через понижающие трансформаторы
подключаются к силовой трехфазной сети. На выходах УС должны
формироваться три последовательности импульсов длительностью
180 эл. град., сдвинутые между собой на 120 эл. град. и
синхронизированные с нулями соответствующих линейных
напряжений сети. При этом погрешность временных параметров
выходных сигналов для обеспечения заданной точности СУ должна
быть минимальной.
Решение этой задачи осложняется тем, что ввиду конечной
мощности трансформаторов силовых подстанций предприятий
форма напряжений сети существенно искажена различными
всплесками и провалами, связанными с работой промышленного
оборудования, т. е. УС в условиях промышленной эксплуатации
ВД являются объектом наиболее сильного воздействия помех. Это
в свою очередь требует принятия специальных мер для обеспечения
их помехозащищенности, так как ложное срабатывание УС под
воздействием помехи может привести к нарушению алгоритма
работы всей СУ и стать причиной аварийного режима.
Основой большинства схем УС являются нуль-органы,
вырабатывающие импульсы в моменты перехода напряжения (тока)
через нуль [207]. Они строятся по принципу усилителей постоянного
тока с большим коэффициентом усиления, работающих в режиме
ограничения или на основе несимметричных пусковых устройств
(детекторов нуля). Для увеличения помехозащищенности УС в их
схему приходится вводить активные фильтры, а для исключения
зависимости фазы выходного сигнала от уровня входного - схемы
автоматической регулировки степени усиления (АРУ). Эти меры
хотя и существенно повышают помехозащищенность, вместе с тем
значительно усложняют схему УС и требуют дополнительной
подстройки и точной фазировки.
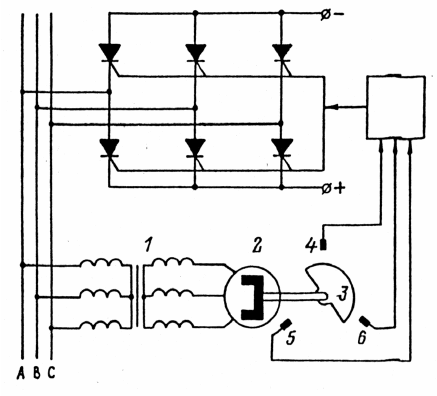
Оригинальный способ построения УС, отличающийся
простотой и повышенной помехозащищенностью, представлен на
рис. 6.25. УС содержит синхронный микродвигатель 2 с датчиком
структура СУ с минимально необходимым количеством элементов.
По мере роста сложности выполняемых электроприводом задач
усложняется и структура СУ.
При этом оправдано не только применение микросхем средней
и большой степени интеграции, но и переход к однокристальным
микроЭВМ, специализированным микропроцессорам и
интерфейсам.
Важным элементом при проектировании СУ является выбор
элементной базы. Микроэлектронная элементная база, постоянно
совершенствуясь и обновляясь, позволяет существенно повышать
как, технические характеристики, такие как точность,
быстродействие, надежность, энергопотребление, габариты и т.д.,
так и функциональные возможности СУ в целом. Как правило, СУ
современных ВД строятся с применением интегральных микросхем
на основе транзисторно-транзисторной логики с диодами Шотки
(ТТЛШ) и логики на комплементарных (дополнительных) полевых
транзисторах со структурой металл-оксид-полупроводник
(КМОПТЛ). Наиболее широкое применение в СУ вентильных
двигателей получили микросхемы второго типа благодаря
наименьшей потребляемой мощности, минимальной энергии
переключения и наибольшему коэффициенту разветвления по
выходу. Хотя по быстродействию и помехозащищенности они
несколько уступают микросхемам на основе ТТЛ-логики.
Несмотря на большое разнообразие структурных схем СУ и
использование различной элементной базы при их построении, можно
выделить некоторые основные функциональные узлы, в том или
ином виде входящие почти в каждую СУ. Такими узлами являются:
- устройства синхронизации;
- фазосдвигающие устройства;
- логические и задающие режим устройства;
- выходные каскады системы управления;
- датчики параметров.
Существует множество схемных решений перечисленных
устройств. Ниже приводятся лишь некоторые из решений, которые
разработаны и в той или иной мере реализованы или испытаны на
практике коллективом "ВНИИ Электромаш".
319
318
Предлагаемое устройство имеет высокую помехо-
защищенность практически от любой помехи со стороны питающей
сети, так как чувствительные элементы датчика положения не
имеют с обмоткой микродвигателя ни гальванической, ни емкостной
связи, а демпферная клетка и значительная инерционность ротора
обеспечивают отсутствие колебаний частоты вращения ротора при
появлении выбросов и провалов в напряжении сети.
Интересно, что предлагаемое УС при работе на управляемый
тиристорный выпрямитель позволяет очень просто не только
осуществлять синхронизацию импульсов управления тиристорами
с сетью, но и вводить фазовый сдвиг их относительно нулей
напряжения сети. Для этого достаточно через механическую
передачу осуществлять поворот на требуемый угол обоймы
чувствительных элементов ДПР.
6.4.3. Фазосдвигающие устройства
Фазосдвигающис устройства (ФСУ) обеспечивают сдвиг по
времени выходных управляющих импульсов относительно
синхронизирующего сигнала.
В СУ коммутатора типа НПЧ эти устройства необходимы как
в канале машинной коммутации для введения угла опережения
включения
, т. е. сдвига импульсов, синхронизированных фронтами
с ДПР, на угол
в сторону опережения, так и в канале сетевой
коммутации для задания угла регулирования
, т. е. сдвига
импульсов, синхронизированных сигналами с УС, на угол
в
сторону отставания. Принципиально ФСУ как для одного, так и
для другого каналов могут быть построены по одной
функциональной схеме.
Наибольшее распространение получили цифровые ФСУ. Их
достоинствами являются высокая точность, стабильность
выходных параметров при изменении внешних условий, хорошая
помехозащищенность, а также возможность непосредственного
управления от ЭВМ. Кроме того, в процессе изготовления и
эксплуатации цифровые ФСУ в отличие от аналоговых не
нуждаются в настройке и регламентных работах.
На рис.6.26 представлены один из возможных вариантов
построения ФСУ канала машинной коммутации, предложенный в
положения ротора 3. При этом обмотка микродвигателя
подключается через понижающий трансформатор 1 к сети, а выходы
трех чувствительных элементов датдатчика положения ротора 4-
6, сдвинутых друг относительно друга на 120 эл. град., являются
выходами УС.
При подключении двигателя к сети он разбегается и после
завершения переходного процесса вращается с синхронной
частотой, равной частоте сети, и постоянным углом нагрузки в.
При синхронной частоте вращения каждому положению ротора
двигателя однозначно соответствует положение вектора
намагничивающей силы статорной обмотки, т. е. имеет место
однозначное соответствие положения ротора и фазы каждого из
фазных напряжений. Чувствительные элементы путем поворота
обоймы датчика устанавливаются таким образом, что моменту
появления переднего фронта сигнала на каждом из них
соответствует момент прохождения через нуль соответствующего
напряжения сети. Для обеспечения надежного пуска и уменьшения
качаний синхронного микродвигателя при колебаниях напряжения
сети его ротор имеет усиленную демпферную систему и
повышенный момент инерции.
Рис. 6.25. Принципиальная схема устройства синхронизации с сетью
321
320
Для трехфазного ВД целесообразно принять k
1
=60, что даст
возможность регулировать угол с дискретностью в 1эл. град. Если
периоду между двумя фронтами импульсов ДПР соответствует N
импульсов тактового генератора, то к моменту прихода каждого
последующего фронта в счетчике 2 накапливается число n=KN.
Это число в момент прихода фронта сигнала ДПР записывается в
инверсном коде в счетчик 3, после чего счетчик 2 сбрасывается.
Переполнение счетчика 3 наступит после прохождения на его
счетный вход n импульсов тактового генератора. При этом
встроенный в счетчик индикатор переполнения запирает его
счетный вход, останавливая счет, и выдает сигнал Q в
функциональный преобразователь 4. Сброс индикатора
переполнения также происходит с приходом фронта сигнала ДПР.
Таким образом, с выхода счетчика 3 снимается импульсная
последовательность Q, передние фронты импульсов которой
сдвинуты по фазе относительно фронтов сигналов ДПР в сторону
опережения на N-n импульсов тактового генератора, что
соответствует времени опережения
,
1в
т1
0
f
N
k
t
где f
т
- частота тактового генератора.
Поскольку угол опережения равен
0
t
(где
- частотата
ЭДС вращения двигателя, а величина
const
т
fN
), то,
следовательно, он полностью определяется кодом и не зависит от
частоты вращения двигателя.
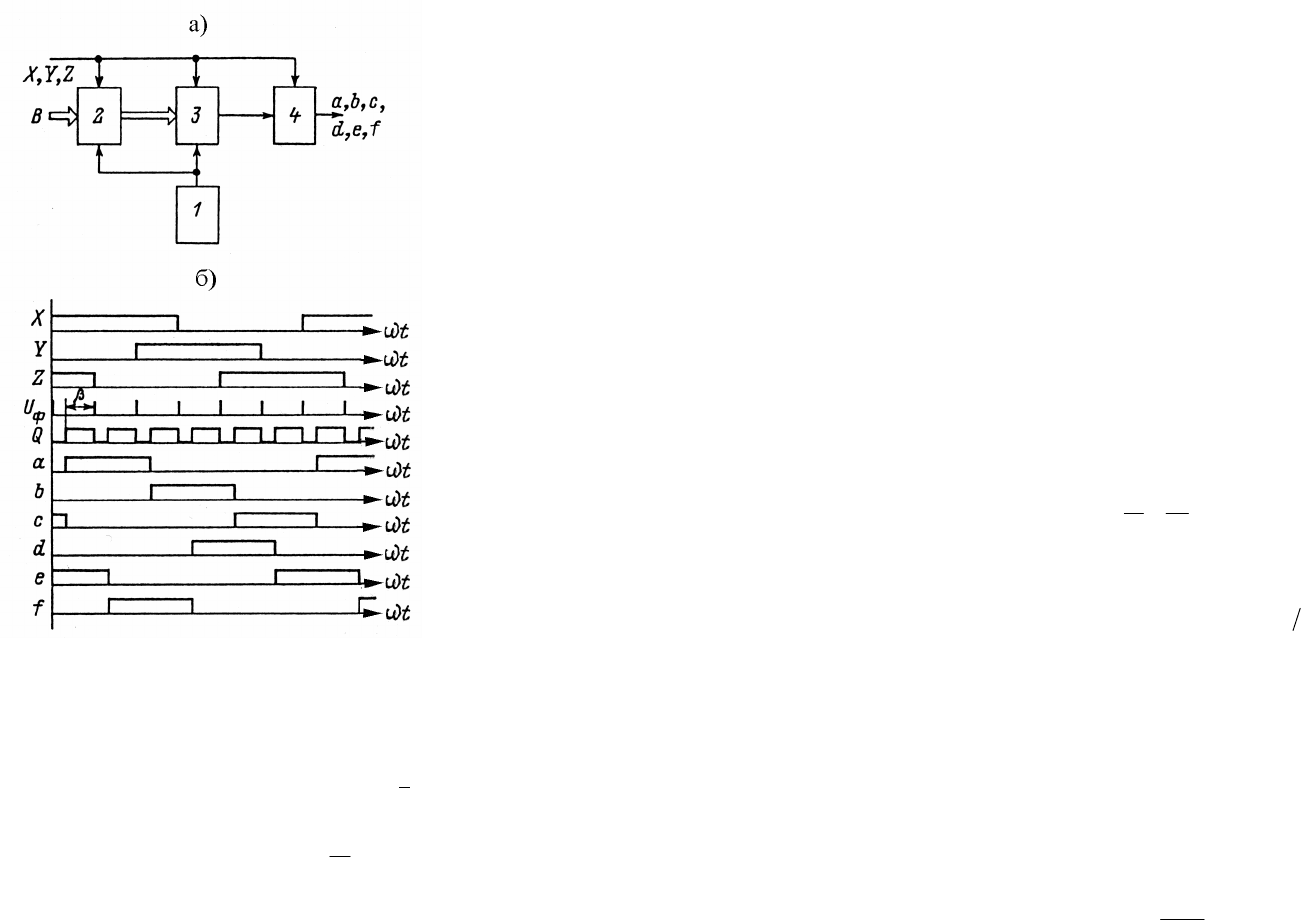
Функциональный преобразователь 4 формирует по сигналам X,
Y, Z, Q шесть выходных напряжений: а, b, с, d, e, f - длительностью
120 эл. град., сдвинутых относительно нейтральной установки на угол
600
эл. град.
Следует отметить, что диапазон частот вращения двигателя,
в котором может осуществляться регулирование угла
, ограничен
емкостью (числом разрядов) счетчиков, определяемой по формуле
1ln44.1
D
Ep
m
,
Рис. 6.26. Схема фазосдвигающего
устройства в канале машинной коммутации
(а) и диаграммы, поясняющие ее работу (б)
[165] и диаграммы,
поясняющие его
работу. ФСУ со-
держит высоко-
частотный тактовый
генератор 1, счетчик
с регулируемым
к о э ф ф и ц и е н т о м
пересчета 2, счетчик
с остановкой при
переполнении 3 и
фун кц и о н а ль н ы й
преобразователь 4.
Импульсы тактового
генератора по-
ступают на счетные
входы счетчиков 2 и
3. На вход
"Установка нуля"
счетчика 2 и на вход
"Запись" счетчика 3
поступают фронты
сигналов ДПР X, Y, Z,
имеющих дли-
тельность 180 эл.
град. и сдвинутых
относительно друг
друга на 120 эл. град.,
т. е. через каждые 60 эл. град.
Коэффициент пересчета К счетчика 2 может быть изменен
путем установки кода В на его входе и определяется выражением
1
в
1
k
K
,
где k
1
- коэффициент, определяющий дискретность регулирования
угла.

323
322
Сигналы с УС X, Y, Z, синхронизированные с нулями линейных
напряжений сети, поступают на вход "Запуск" счетчика 1 и входы
элемента памяти 4 и функционального преобразователя 5. Сигнал
переполнения U
1
на выходе счетчика 1 появляется после
прохождения на его счетный вход n
1
импульсов с тактового
генератора, что соответствует требуемому значению угла
регулирования одной из групп тиристоров, например анодной,
задаваемому в инверсном коде уставкой В счетчика 1. Этим
сигналом сбрасывается счетчик 3, и на его выходе появляется
сигнал логического нуля, открывающий ключ 2, который пропускает
на счетный вход счетчика 3 импульсы тактового генератора. По
прошествии n
2
импульсов на выходе счетчика появляется сигнал
U
2
, закрывающий ключевой элемент 2 и запускающий элемент
памяти 4. При этом число n
2
определяет необходимый угловой сдвиг
между импульсами анодной и катодной групп (при симметричном
управлении
1
= 60 эл. град.). Сброс элемента памяти
осуществляется задними фронтами сигналов X, Y, Z.
Функциональный преобразователь вырабатывает шесть
последовательностей импульсов длительностью 120 эл. град.
Причем импульсы а, b, с сдвинуты относительно "нулей" линейных
напряжений на угол
a
, а импульсы d, e, f - на угол
x
.
6.4.4. Логические устройства и устройства задания
режима работы ВД в электроприводе
При частых пусках и реверсах мощных ВД особенно
актуальными становятся вопросы ограничения пусковых токов и
рекуперации энергии в сеть при торможении двигателей. Решение
этих задач усложняет алгоритмы управления ВД. Кроме того,
регулирование и стабилизация частоты вращения также могут
осуществляться по разным алгоритмам [17, 18].
Все это требует введения в состав СУ логических устройств
и устройств задания режима (УЗР), осуществляющих по сигналам
с пульта управления или от ЦВМ, а также с датчиков параметров
операции перевод ВД в нужный режим без возникновения перегрузок
и опасных режимов.
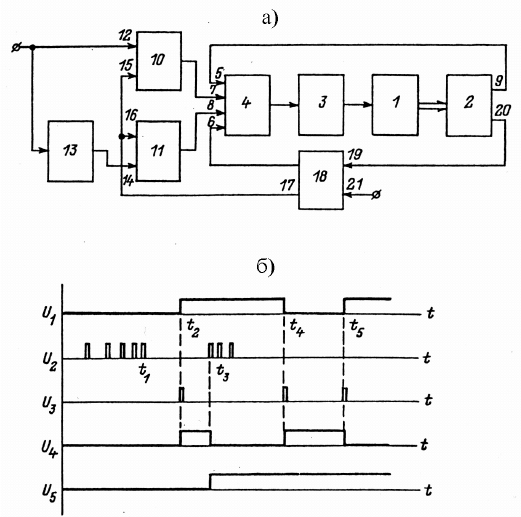
На рис. 6.28 представлен пример построения системы
управления ВД с коммутатором типа НПЧ, позволяющей
где Е - целая часть числа;
m
- максимальное значение угла
опережения;
- дискретность изменения угла; D - диапазон
регулирования частоты вращения двигателя.
Например, при
m
= 60 эл. град. и
= 1 эл. град, минимальное
число двоичных разрядов в счетчике равно шести при
максимальной частоте вращения. При D = 100 на минимальной
частоте вращения необходимы уже 23-разрядные счетчики.
Для того чтобы избежать увеличения числа разрядов счетчиков
и каналов передачи информации в широкодиапазонном приводе, в
состав ФСУ может быть введен управляемый делитель частоты,
вход которого подключен к выходу тактового генератора 1, а вы-
ход - к счетным входам счетчиков 2 и 3 [165]. Коэффициент деления
управляемого делителя может принимать значения от 1 до 2q в
зависимости от частоты вращения двигателя, где q - число
разрядов делителя частоты.
Описанное ФСУ обеспечивает симметричное регулирование
угла, т. е. одинаковый фазовый сдвиг импульсов для анодной и
катодной групп тиристоров. В канале сетевой коммутации часто
используется несимметричное управление, когда углы
регулирования тиристорами анодной и катодной групп не равны,
благодаря чему несколько повышается сети. В этом случае
управление тиристорами каждой группы может осуществляться
от своего независимого ФСУ, аналогичного описанному.
Однако установка самостоятельных кодов на входах
счетчиков разных групп требует большого числа каналов связи и
усложняет схему. Этот недостаток устранен в ФСУ, схема которого
и диаграммы, поясняющие се работу, представлены на рис.6.27.
ФСУ содержит счетчик 1, выполненный с возможностью установки
начального кода, ключевой элемент 2, счетчик 3, элемент памяти
4 и функциональный преобразователь 5.
На счетные входы счетчика 1 и через ключевой элемент 2
счетчика 3 поступают импульсы тактового генератора, частота
которых выбирается исходя из соотношения
,
360
1
т
k
f
f
c
где f
с
= 50 Гц - частота сети.
325
324
На вход 12 поступает сигнал U
1
, который в зависимости от
требуемого направления вращения может принимать значения
логического нуля либо логической единицы. При пуске двигателя,
пока частота вращения не достигла некоторого значения
1
(около
0,1
н
) на командный вход 15 с выхода 17 формирователя 18
периодически поступают импульсы U
2
, устанавливающие D-
триггер 10 в состояние, определяемое напряжением U
1
на его
информационном входе 12, а счетный триггер 11 - в состояние
логического нуля. При этом на вход канала рекуперации подается
напряжение U
4
, уровень которого соответствует логическому нулю.
Двигатель работает в двигательном режиме и разбегается с
ограничением пускового тока в направлении, заданном сигналом
U
5
на входе канала реверса. При достижении частоты вращения в
момент времени t
1
импульсы U
2
пропадают и двигатель продолжает
разгоняться до частоты вращения
, заданной углом регулирования
по каналу управления.
Пусть команда на реверс в виде изменения сигнала U
1
приходит
в момент времени 12. Так как при этом U
2
= 0. то D-триггер
сохраняет свое состояние и на вход канала реверса 7 команда на
реверс не проходит. На вход 14 счетного триггера через
формирователь 13 поступает сигнал U3, опрокидывающий его, и
на вход 8 канала рекуперации поступает сигнал U
4
, с приходом
которого начинается торможение двигателя с рекуперацией энергии
в сеть. При снижении частоты вращения до безопасной с точки
зрения броска тока величины в момент времени t
3
начинают
поступать импульсы U
2
, первый из которых изменит состояние D-
триггера, и на вход 7 канала реверса поступит напряжение U
5
,
соответствующее изменению направления вращения.
Одновременно счетный триггер изменит свое состояние и сигнал
U
4
на входе канала рекуперации станет равным нулю, что
соответствует двигательному режиму, и двигатель меняет
направление вращения. При этом броски тока отсутствуют.
Пусть при t = t
4
U
1
снова изменится и двигатель перейдет в
режим рекуперации энергии. Если при этом частота вращения не
успела снизиться до
1
, a U
1
снова изменится при t = t
5
, то вторым
импульсом с формирователя 13 счетный триггер вновь опрокинется,
осуществлять разбег двигателя с ограничением пускового тока,
торможение и реверс с рекуперацией энергии в сеть [165]. Обмотка
двигателя 1, с ротором которого механически связан датчик
обратных связей 2 по положению (выход 9) и скорости (выход 20),
подключена к сети с помощью тиристорного преобразователя 3,
ключи которого управляются логическим устройством 4.
Логическое устройство имеет несколько входов, в том числе вход
5 канала обратной связи по положению, вход 6 канала управления
скоростью, вход 7 канала реверса и вход 8 канала рекуперации
энергии. В состав устройства входят также D-триггер 10, счетный
триггер 11, формирователь фронтов 13 и формирователь сигнала
обратной связи по скорости 18.
Рис. 6.28. Пример построения СУ, позволяющей осуществлять разбег
ВД с ограничением пускового тока, торможение и реверс с рекупера-
цией энергии в сеть (а); диаграммы, поясняющие работу СУ (б) [56 ]
327
326
устанавливает его в состояние, соответствующее заданному по
входу 19 направлению вращения. В то же время, так как двига-
тель еще не вращается, единичный сигнал обратной связи по
скорости через конъюнктор 16 устанавливает RS-триггер 13 в
состояние логического нуля, которому соответствует
выпрямительный режим блока сетевой коммутации 6 с углом
900
эл. град. По мере разбега двигателя сигналы обратной
связи по скорости и с датчика тока пропадают, при этом D- и RS-
триггеры остаются в прежних состояниях.
Для реверса двигателя изменяют логический уровень сигнала
на входе 19 элемента "Исключающее ИЛИ" 10. При этом фронт
его выходного сигнала устанавливает RS-триггер в состояние
логической единицы, что соответствует инверторному режиму
блока 6 с углом
12090
эл. град. Как только ток черезз
тиристоры упадет до нуля, выходной сигнал с датчика тока 9
переведет D-триггер в новое логическое состояние,
устанавливающее блок 4 в состояние, соответствующее
противоположному направлению вращения. Такое сочетание
состояний блоков 4 и 6 характеризует режим торможения двигателя
с рекуперацией энергии в есть. Как только частота вращения
снизится до нуля и RS-триггер установится в состояние логического
нуля, переводя блок 6 в выпрямительный режим, двигатель
разбегается в противоположную сторону.
При поступлении на входы 14 и 15 команды "Останов" элемент
10 изменяет свое состояние, что имеет последствия, аналогичные
описанным при реверсе. Однако при снижении частоты вращения
до нуля сигнал обратной связи по скорости через конъюнктор 16
не проходит, блок 6 остается в инверторном режиме и двигатель
останавливается.
6.4.5. Выходные каскады системы управления
Выходные каскады являются звеном, осуществляющим связь
системы управления с силовой частью коммутатора ВД, и во
многом определяют надежность его работы. В их функции входит
усиление сигналов, поступающих с логической части системы
управления, формирование по ним импульсов управления и
распределение их по управляющим переходам тиристоров. Кроме
переводя двигатель в двигательный режим. Следует отметить, что
введение в описанную схему дополнительного D-тригтера и
логического элемента "Исключающее ИЛИ" позволяет, учитывая
указанное обстоятельство, довольно просто осуществлять
импульсное регулирование частоты вращения мощных
низкоскоростных ВД с рекуперацией энергии в паузах между
управляющими импульсами [165].
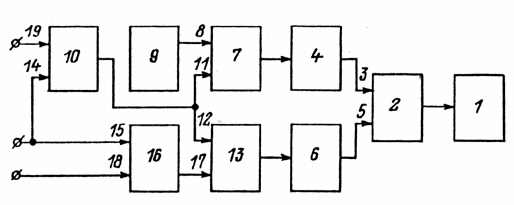
На рис.6.29 приведен другой пример построения СУ,
позволяющий несколько проще осуществлять реверс и торможение
с рекуперацией энергии.
На вход 19 поступает сигнал, задающий направление вращения,
на входы 14 и 15 - сигнал, единичному уровню которого
соответствует команда на вращение, а нулевому - на останов, на
вход 18 - сигнал обратной связи по скорости, причем вращению
двигателя соответствует нулевой уровень сигнала. При наличии
тока нагрузки с датчика тока 9 выдается нулевой сигнал, при
отсутствии - единичный.
При пуске двигателя на входы 14 и 15 подается сигнал
логической единицы. При этом, так как ток по тиристорам
преобразователя пока не протекает, D-триггер 7 единичным
сигналом на командном входе 8 устанавливается в состояние,
заданное сигналом на его информационном входе 11. Сигнал с
выхода D-триггера, поступая на блок машинной коммутации 4,
Рис. 6.29. Другой пример построения СУ, позволяющий осуществлять
реверс и торможение с рекуперацией энергии (пояснения в тексте):
1 - силовая часть преобразователя; 2 - логическое устройство; 4 - блок
машинной коммутации; 6 - блок сетевой коммутации; 7 - D-триггер; 9
- датчик тока нагрузки; 13 - RS-триггер; 16 - конъюнктор; 10 - логиче-
ский элемент "Исключающее ИЛИ"
329
328
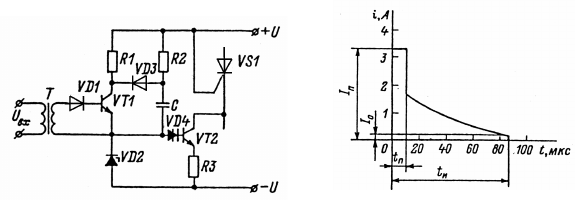
тиристорами является короткий импульс с крутым передним
фронтом (порядка 3-5 А/мкс) и увеличенной амплитудой начальной
части, в 3-5 раз превышающей номинальное значение тока
управления тиристорами. Длительность этой части импульса для
большинства тиристоров должна составлять 10-20 мкс при
длительности всего импульса около 100-200 мкс в зависимости от
характера нагрузки. При такой форме импульса улучшаются условия
включения тиристора, а именно уменьшаются потери и сокращается
время включения, снижается местный перегрев кристаллической
структуры тиристора.
Схема, а также форма и параметры выходного импульса
устройства с бестрансформаторным выходом для формирования
оптимальных импульсов управления тиристорами представлены на
рис.6.30 и 6.31.
Устройство работает следующим образом. В исходном
состоянии каскадно соединенные транзисторы VT1 и VT2,
образующие усилитель, закрыты, а конденсатор С заряжен до
напряжения источника питания. Когда входной сигнал в виде
короткого прямоугольного импульса положительной полярности,
передаваемого через импульсный трансформатор Т или входной
оптрон, приходит на базу транзистора VT1, транзисторы VT1 и VT2
открываются и формируются передний фронт и "полочка" I
n
импульса управления тиристором. Одновременно конденсатор С
разряжается через транзистор VT1 и диод VD3, причем благодаря
Рис. 6.30. Схема устройства фор-
мирования импульсов управления
тиристором
Рис. 6.31. Параметры выходного
импульса устройства формирова-
ния оптимальных импульсов
управления тиристором
того, выходные каскады должны обеспечивать гальваническую
развязку входных и выходных цепей, а также выходных цепей друг
от друга.
Функциональная схема выходных каскадов во многом зависит
от способа управления тиристорами. Существует два основных
способа. Первый состоит в том, что на управляющий переход
тиристора поступает длинный отпирающий импульс в течение всего
интервала проводимости тиристора. Этот способ применим чаще
всего для управления тиристорами инверторов ВД, выполненных
по схеме со звеном постоянного тока с регулируемым
выпрямителем [116].
К достоинствам способа следует отнести надежность
открытия тиристоров, особенно в режиме прерывистых токов при
глубоком регулировании. Принципиальные схемы выходных
каскадов с длинными импульсами можно найти в ряде работ,
например в [76].
Существенным недостатком выходных каскадов с длинными
импульсами является их большая установленная мощность и, как
следствие, значительные массогабаритные показатели. Кроме того,
они требуют увеличения мощности источников питания системы
управления.
Ввиду этих недостатков довольно широкое распространение
получил второй способ управления тиристорами - с помощью
коротких импульсов, поступающих на управляющий переход
тиристоров только в начале интервалов их проводимости. При этом
длительность импульсов должна быть достаточной для надежного
отпирания тиристоров. Этот способ применяется в регулируемых
выпрямителях, ряде инверторов [104]. Разновидностью способа
является управление сдвоенными короткими импульсами,
сдвинутыми на m эл. град., благодаря чему обеспечивается
открытие тиристоров преобразователя как при пуске двигателя,
так и в режиме прерывистых токов.
Выходные каскады с короткими импульсами выгодно
отличаются как значительно меньшими мощностью и габаритами,
так и существенно лучшими энергетическими показателями.
Исследования динамических режимов работы тиристоров
показали [166], что оптимальным импульсом управления мощными