Аракелян А.К., Афанасьев А.А. Вентильные электрические машины в системах регулируемых электроприводов. Том 1
Подождите немного. Документ загружается.

251250
После подстановки равенств (5.29)-(5.32) в формулы (5.26)-
(5.28) получим
,
211101
T
nnn
yyyCCCy
(5.33)
,
1321102
T
nnn
yyyCCCy
(5.34)
. . . . . . . . . . . . .
,
1211102
T
nnnnn
yyyCCCy
(5.35)
где обозначено:
........
1
1
1
11
2
1
1110
n
n
n
n
n
n
nn
n
kk
kk
kkkCCC
(5.36)
Равенства (5.33)-( 5.35) можно объединить в одно
n
n
n
nnnn
n
n
y
y
y
C
C
C
yyy
yyy
yyy
2
2
1
1
1
0
121
132
21
. (5.37)
Система линейных уравнений (5.37), в которой использованы
2n ординат кривой затухания свободного тока фазы синхронной
машины, позволяет определить коэффициенты
.,
110 n
CCC
Уравнению (5.36) можно придать форму
.
1
1
2
1
1
1
1
0
2
2
2
22
1
2
11
n
n
n
n
n
n
nnn
n
n
k
k
k
C
C
C
kkk
kkk
kkk
(5.38)
Система уравнений (5.38) эквивалентна полиному n-й степени:
,0
1
1
2
210
nn
n
kkCkCkCC
(5.39)
корнями которого являются неизвестные коэффициенты
n
kkk ,,
21
.
,
21
11
2
1
11
T
n
n
n
nn
n
IIIkkky
(5.26)
,
21
1
11
12
T
n
n
n
n
n
n
III
k
k
kky
(5.27)
. . . . . . . . . . . . . . .
.
21
1
1
11
12
T
n
n
n
n
n
n
n
III
k
k
kky
(5.28)
Для столбца
T
n
III
21
, в соответствии с формулой (5.25),
можно получить следующие выражения:
,.......
1
1
1
11
n
n
n
n
n
n
y
y
kk
kk
I
I
(5.29)
,.......
1
2
1
1
1
1
11
n
n
n
n
n
nn
y
y
kk
kk
k
k
I
I
(5.30)
,.......
2
3
1
1
1
2
11
n
n
n
n
n
nn
y
y
kk
kk
k
k
I
I
(5.31)
. . . . . . . . . . . . .
........
12
1
1
1
1
11
n
n
n
n
n
n
n
nn
y
y
kk
kk
k
k
I
I
(5.32)
253252
Из формулы (5.22) также следует:
,
2
2
1
1
n
n
p
I
p
I
p
I
pi
(5.46)
.
2
22
1
11
n
nn
p
I
p
I
p
I
pip
(5.47)
Сравнивая (5.45) и (5.47), получим
.
2
22
1
11
n
nn
p
I
p
I
p
I
pLpr
U
(5.48)
Операторная проводимость обмотки статора
pLpr
1
выражается, как видно из равенства (5.48), формулой:
,
1111
2211 nn
LprLprLprpLpr
(5.49)
где
;
j
j
I
U
r
. ,,2,1 nj
I
U
L
jj
j
Выражению (5.49) соответствует электрическая схема
замещения синхронной машины, представленная на рис. 5.7.
Отметим, что для продольного и поперечного токов обмотки
статора справедливо выражение [91]:
,
3
2
cos
3
2
coscos
3
2
cbad
iiii
(5.50)
,
3
2
sin
3
2
sinsin
3
2
cbaq
iiii
(5.51)
Рис. 5.7. Схема замещения синхронной машины
В соответствии с формулой (5.24) получаем далее
.,,2,1 ,ln njtk
jj
(5.40)
Cогласно уравнениям (5.23) справедливо
.
111
1
1
0
2
1
11
2
1
1
21
nn
n
n
nn
n
y
y
y
I
I
I
kkk
kkk
(5.41)
Из системы линейных уравнений (5.41) находим теперь
начальные значения амплитуд токов
njI
j
,,2,1
.
Таким образом, зависимости (5.38)-( 5.41) позволяют
определить все компоненты убывающего тока фазы (5.22).
5.5.3. Определение параметров электрической схемы
замещения синхронной машины
Начальное значение тока в фазе а обмотки статора
,
0
r
U
Ii
a
(5.42)
где в соответствии с рис.5.5 имеем
a
rr
2
3
, (
a
r
- активное сопро-
тивление фазы обмотки статора).
Момент замыкания выключателя К cоответствует подаче на
статор напряжения (-U), вызывающего добавочный ток, который
можно определить по Лапласу как
. ppLrpU
(5.43)
Изображения результирующего тока i(t) и его производной
будут иметь вид
.
ppLrp
U
pr
U
pi
(5.44)
.
pLpr
U
pip
(5.45)
255254
.
2
2
1
1
nq
nq
q
q
q
q
aq
q
III
I
r
L
(5.59)
С учетом того, что
jjj
Lr
и в установившемся режиме
(до закорачивания обмотки статора)
, ; rUIrUI
ajj
(5.60)
получим из выражений (5.58), (5.59) новые формулы для
синхронных индуктивностей:
,
22
2
2
2
1
1
2
nd
nd
d
d
d
d
d
r
L
r
L
r
L
rL
(5.61)
.
22
2
2
2
1
1
2
nq
nq
q
q
q
q
q
r
L
r
L
r
L
rL
(5.62)
Из формулы (5.49) можем найти операторную индуктивность
.
11
1
11
p
r
pLrpLr
p
pL
nn
(5.63)
Взяв в ней
p
, определяем сверхпереходные
индуктивности:
,
111
1
21 nddd
d
LLL
L
(5.64)
.
111
1
21 nqqq
q
LLL
L
(5.65)
Операторная проводимость при p=0 в формуле (5.49)
соответствует электрической проводимости обмотки статора (для
схемы рис.5.5) в установившемся режиме (
t
):
,
1111
21 nddd
rrrr
(5.66)
где
- угол между магнитной осью фазы а статора и осью d ротора.
Для схемы (рис.5.5), когда
2/
acb
iii
, будем иметь из фор-
мул (5.50), (5.51) соответственно при 0
и
2
:
. ;
aqad
iiii
(5.52)
Аналогично доказывается, что для потокосцеплений обмотки
статора справедливо
. ;
aqad
(5.53)
Ориентируясь для определенности на первое равенство в
формулах (5.52), (5.53), имеем для свободного процесса убывания
тока статора по оси d:
,
d
d
ir
dt
d
(5.54)
отсюда
dtirILd
dadddd
0
0
0
(5.55)
или
.
0
0
dti
I
r
I
L
d
adad
d
d
(5.56)
По аналогии
.
0
dti
I
r
L
q
aq
q
(5.57)
Формулы (5.56), (5.57) позволяют определить синхронные
индуктивности обмотки статора
d
L
и
q
L
, если найдены
экспериментально площади (интегралы) убывающего тока фазы a
статора для двух характерных положений ротора.
Принимая во внимание выражение (5.22) для тока i, из формул
(5.56), (5.57) можем также получить
,
2
2
1
1
nd
nd
d
d
d
d
ad
d
III
I
r
L
(5.58)
257256
Таким образом, для потокосцепления обмотки статора
d
, в
соответствии с формулой (5.69), будем иметь:
.
1
jd
n
j
jd
id
d
i
r
rL
(5.74)
В частности для начального момента (t=0) затухания тока из
формулы (5.74) получим, используя зависимости (5.60):
.
2
1
2
0 a
jd
jd
n
j
d
I
r
L
r
(5.75)
Поскольку в этом режиме
add
IL
0
, то из (5.75) следует:
.
1
22
n
j
jdjdd
rLrL
(5.76)
Это выражение идентично зависимости (5.61), полученной
ранее.
Электрическая схема замещения синхронной машины с
неподвижным ротором (рис.5.7) неудобна для пользования, так как
она не позволяет в явном виде выделить потокосцепление
qd
обмотки статора.
Произведем обоснование другой схемы замещения, более
удобной для практического применения.
Уравнение равновесия напряжения, приложенного к обмотке
статора (рис. 5.8), имеет вид:
Рис. 5.8. Схема включения обмотки статора синхронной машины
на постоянное напряжение
.
1111
21 nqqq
rrrr
(5.67)
В соответствии с рис.5.7 потокосцепление обмотки статора по
соответствующей оси будет формироваться независимыми токами
nji
j
,,2,1
.
Процесс затухания тока в схеме рис. 5.6, например, для продоль-
ной оси будет описываться дифференциальным уравнением (5.54),
которое запишем в виде формулы
,0
1
d
jd
n
j
jd
ir
dt
di
L
(5.68)
где
,
1
jd
n
i
jdd
iL
(5.69)
jd
L
- некоторые неизвестные индуктивности, которые определим
с помощью n дифференциальных уравнений вида
.0
jdjd
jd
jd
ir
dt
di
L
(5.70)
Эти уравнения описывают затухание тока в n ветвях схемы
замещения (рис. 5.7).
Из (5.70) следует
.
jd
jd
jdjd
i
L
r
dt
di
(5.71)
Подставляя формулу (5.71) в (5.68), получим:
.
11
n
j
jdjd
jd
jd
n
j
jd
iri
L
r
L
(5.72)
Из сопоставления левых и правых частей равенства (5.72)
следует выражение для искомых индуктивностей:
.
jd
jd
jd
r
L
rL
(5.73)
259258
r
r
r
L
d1
L
d2
L
nd
i
n d
р
1q
р
2q
р
nq
u
nd
u
d2
u
d1
i
d1
i
d2
Рис. 5.9. Схема замещения
синхронной машины по
продольной оси
Выводы
1. Рассматриваемый метод позволяет определить типовые
статические и динамические частотно-независимые параметры
синхронной машины.
2. Метод оперирует также с рядом легко вычисляемых
специфических параметров, позволяющих получить новые схемы
замещения синхронной машины, удобные для практического
применения.
3. Для повышения эффективности метода (увеличение
точности, количества учитываемых экспонент, в том числе с
большими коэффициентами затухания) необходимо применение
аппаратных средств,
позволяющих пре-
образовать кривую
затухания свободного тока
обмотки статора в
решетчатую функцию с
достаточно большим
числом дискрет на
интервале наблюдения.
.
11
dt
di
Lir
dt
d
iru
jd
n
j
jd
n
j
jd
d
d
(5.77)
В соответствии со схемой замещения (рис.5.7) для n
независимых контуров справедливы уравнения:
.
dt
di
Liru
jd
jdjdjd
(5.78)
После умножения левой и правой частей этого уравнения на
множитель
jd
rr
получим с учетом формулы (5.73)
.
dt
di
Lir
r
r
u
jd
jdjd
jd
(5.79)
Уравнениям (5.77), (5.79) соответствует электрическая схема
замещения синхронной машины в координатах d, q (рис. 5.9),
которая справедлива также и для вращающего ротора. На ней
njiL
r
r
uu
qjdqjdqjd
qjd
qjd
,,2,1 ;
)()()(
)(
)(
.
Схема может учитывать и магнитоэлектрическое возбуждение
ротора путем введения источника тока
)(qmd
i
, обеспечивающего
потокосцепление обмотки статора
.
)()()( qmdqidqmd
iL
(5.80)
Указанное потокосцепление может быть найдено с помощью
основной гармоники ЭДС холостого хода обмотки статора:
,2
0 pmd
E
(5.81)
где
р
- электрическая частота вращения ротора.
Этот метод был реализован в учебных лабораториях кафедр
электропривода и электромеханики ЧГУ на базе сначала
измерительно-вычислительного комплекса ИВК-8, а затем ПК типа
ДВК.
261
260
машины постоянного тока и поэтому называется бесколлекторным
двигателем постоянного тока или ВД. Электронный
(полупроводниковый) инвертор, управляемый расположенным на
валу СД полюсным датчиком положения ротора, выполняет функции
механического коллектора, а вентили инвертора тока - функция
скользящего щеточного контакта ДПТ.
Режим работы ВД по принципу действия существенно
отличается от частотнорегулируемого синхронного двигателя и,
тем более, от режимов обычного СД, питающегося от сети. По
сравнению с приводимым синхронным двигателем, питаемым от
управляемого ПЧ с внешним управлением, в котором частота
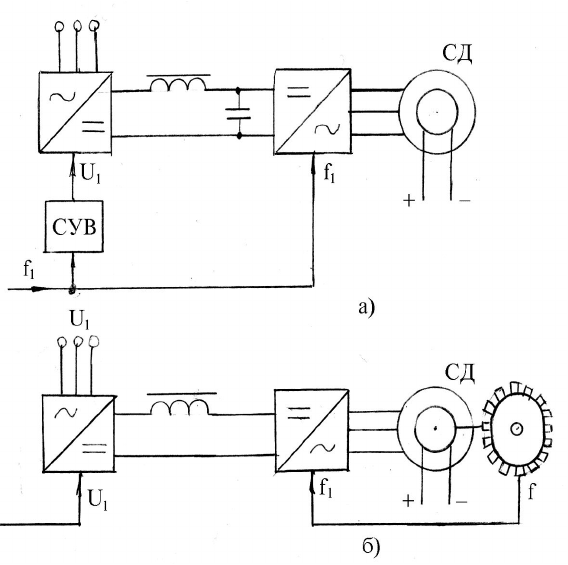
Рис. 6.1. Принципиальные схемы управления синхронным двигателем:
а - внешнее управление СД (принцип частотноуправляемого СД),
б - внутреннее управление СД (принцип управления вентильным
двигателем)
Ч А С Т Ь В Т О Р А Я
ВЕНТИЛЬНЫЕ ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ
В РЕГУЛИРУЕМОМ ЭЛЕКТРОПРИВОДЕ
Г л а в а ш е с т а я
ФУНКЦИОНАЛЬНАЯ СХЕМА И СОСТАВНЫЕ ЧАСТИ
ЭЛЕКТРОПРИВОДА С ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ
6.1. Общая функциональная схема электропривода.
Принцип действия вентильного двигателя
Развитие современной техники электропривода характеризуется
увеличением производительности и надежности систем, а также
увеличением числа выполняемых ими функций. Однако создание
таких систем электроприводов требует существенного повышения
надежности их элементов, в первую очередь непосредственно
электромеханических преобразователей энергии - приводных
двигателей. Одним из решений этой проблемы является
использование в электроприводе синхронных двигателей (СД),
питаемых из статических преобразователей частоты (ПЧ) с
вентильными коммутаторами с внешним либо с внутренним
управлением.
При внешнем управлении осуществляется принцип частотного
регулирования синхронного двигателя в электроприводе [82], со
всеми вытекающими особенностями работы СД при изменяющейся
частоте сети.
В подавляющих же случаях на современных регулируемых
электроприводах с СД управление инвертором преобразователя
частоты осуществляется в функции углового положения
ротородвигателя, т. е. осуществляется принцип внутреннего
управления. При этом в любом установившемся режиме выходная
частота ПЧ в точности совпадает с частотой ЭДС вращения СД.
Таков принцип действия электромеханического
преобразователя энергии, принцип вентильного двигателя (ВД).
Самоуправляемый синхронный двигатель обладает свойствами
263
262
Таблица 6.I
питающего СД инвертора тока (напряжения) задается
принудительно задатчиком частоты, приводы с вентильным
двигателем имеют следующие преимущества:
1. Они обладают свойством автокоммутации, т.е.
преобразования питающего напряжения (тока) в частоту и фазу
ротора, благодаря чему снижаются качания синхронной машины
независимо от толчков нагрузки и скорости вращения. Поэтому у
ВД невозможен асинхронный режим когда частота ЭДС вращения
СД не совпадает с частотой источника питания.
2. Перегрузочная способность электропривода с ВД не зависит
от опрокидывающего момента СД, а определяется лишь
установленной мощностью ПЧ. При перегрузке ВД может
тормозиться, но не выходит из синхронизма.
3. При пуске системы электропривода может быть получен
любой вращающий момент.
В зависимости от схемы преобразователя частоты, в
особенности от построения промежуточного контура постоянного
тока, а так же от способа регулирования, различается инверторы,
управляемые напряжением или током (см. табл.6.1).
Входное напряжение инвертора, напротив, поддерживается
постоянным с помощью емкости (С) и необходимого регулирования
или изменения в соответствии с заданным управлением.
Тиристорные или транзисторные коммутаторы инвертора
вырабатывают (формируют), в зависимости от длительности
включения вентилей, ступенчатое или прямоугольное (по форме
сигнала) напряжение. Вследствие сглаживающего действия
сопротивления рассеяния статорной обмотки электрической машины
(СД), ток машины (двигателя) оказывается практически
синусоидальным.
Входной ток инвертора тока поддерживается постоянным с
помощью дросселя (L) и соответствующего регулирования или
изменения по требуемому закону. Тиристорные или иные
вентильные коммутаторы распределяют ток по обмоткам
двигателя. Напряжение статора СД формируется преимущественно
синусоидальным потоком сцепления машины
Современные регулируемые электроприводы с ВД, несмотря
на разнообразные варианты применяемых СД и ПЧ, имеют
Вид инвертора
Принципиальная
схема
Управляемая входная величина электромагнитного
преобразователя энергии двигателя
Выходная величина
синхронного двигателя
Инвертор, управляемый
напряжением
Инвертор, управляемый
током
Импульсный режим
- коммутация
- коммутация
- коммутация
265
264
Информация об электрическом состоянии непосредственно
двигателя обеспечивается датчиком напряжения
1
U
, тока якоря
UA и тока обмотки возбуждения - UAE. Возможно использование
и других датчиков, например, датчика скорости и т. п.
В рассматриваемой схеме преобразования энергии m-фазный
синхронный электродвигатель получает питание через зависимый
мостовой инвертор от источника постоянного тока - выпрямителя
В (в общем случае регулируемого), в качестве которого могут
служить так же сеть постоянного тока, генератор постоянного тока,
механический выпрямитель или аккумуляторная батарея.
Инвертором в преобразовательной технике, как известно,
принято называть статический преобразователь постоянного тока
в переменный, основанный на использовании полупроводниковых
вентилей (тиристоров, кремниевых полууправляемых или полностью
управляемых вентилей), полупроводниковых полностью
управляемых триодов и др.
Инверторы подразделяются на автономные (независимые) и
зависимые (инверторы, ведомые сетью или питающиеся от нее
электродвигатели).
К автономным инверторам относятся преобразователи
постоянного тока в переменный с принудительной коммутацией тока
в вентилях, нагрузкой которых может быть произвольная цепь как
пассивного, так и активного характера (нагрузка типа R, L, М, С,
двигатель переменного тока).
Под зависимым же инвертором понимается преобразователь
постоянного тока в переменный, отдающий энергию нагрузке,
которая уже содержит источник ЭДС той же частоты. Причем
благодаря действию этой ЭДС осуществляется естественная
коммутация тока вентилей преобразователя - инвертора.
Наиболее распространённые нагрузки такого вида: сеть
переменного тока, мощность которой несоизмеримо больше
мощности, поступающей через инвертор; одна или несколько машин
переменного тока (синхронных и асинхронных) с возбуждёнными
якорными обмотками. В первом случае частота, величина и форма
кривой напряжения на выходных зажимах зависимого инвертора
заданы и не зависят от работы самого инвертора. Во втором же
случае, когда мощности машин и преобразователя соизмеримы,
определенную общность в отношении состава и взаимодействия
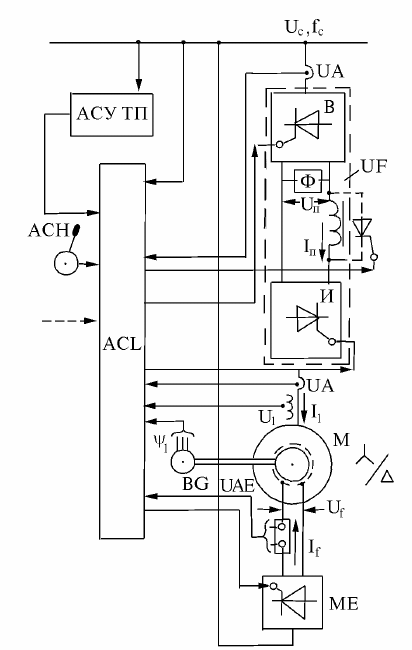
основных частей. Эти общие черты отражены в функциональной
схеме на рис.6.2.
Обмотка якоря
вентильного двигателя
M питается от
полупроводникового
преобразователя ча-
стоты с зависимым
инвертором тока (на-
пряжения) UF, обмот-
ка возбуждения двига-
теля - от статического
(полупроводникового)
возбудителя МЕ.
Управление пре-
образователем ча-
стоты и возбудителем
осуществляется схем-
ными устройствами
а в т о м а т и ч е с к о г о
управления и регу-
лирования ACL. В это
устройство вводится
задание скорости (или
электромагнитного
момента) электро-
привода от соответ-
ствующего командо-
аппарата (АСН) либо
от вышестоящей
системы автоматического управления технологическим процессом
(АСУ ТП). В устройство управления и регулирования поступает
информация о положении ротора двигателя от датчика углового
положения ротора (ДПР), BG, имеющего различные принципы
(схемы) устройства или действия.
Рис. 6.2. Общая функциональная схема
регулируемого электропривода с вентильным
двигателем
267
266
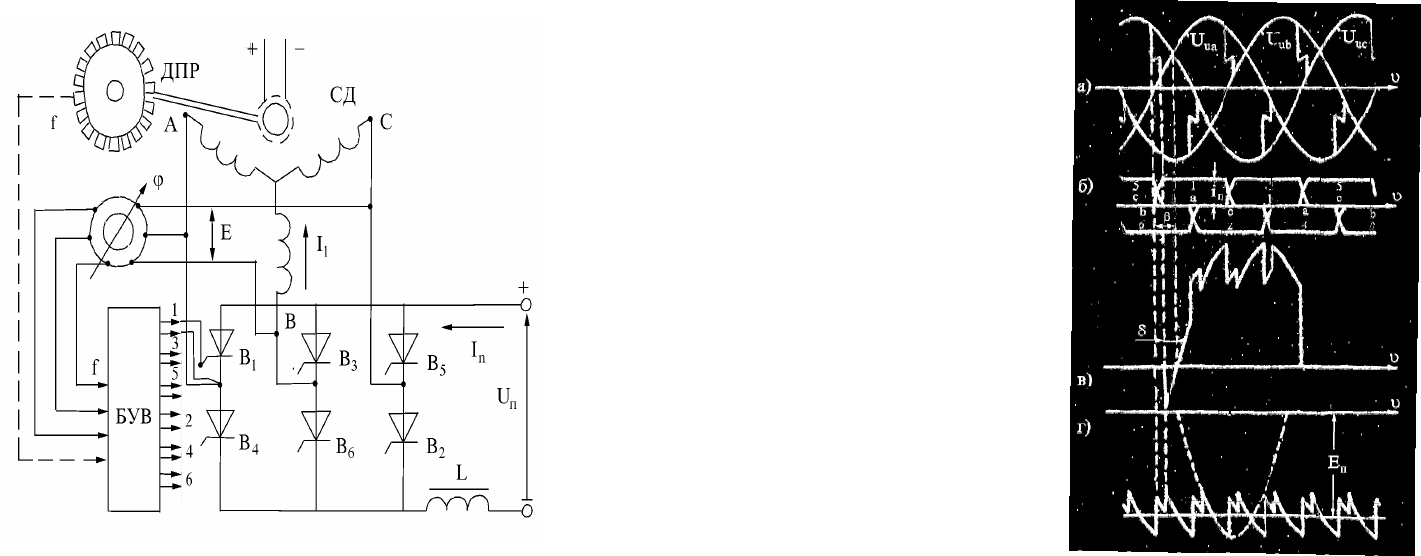
входную цепь постоянного тока преобразователя. Указанное
включение составляет временный интервал в 60 эл.градусов (при
пренебрежении временем совместной работы вентилей одной груп-
пы - анодной или катодной, временем коммутации), при учёте же
последнего этот интервал составит
60
эл.град., где
- уголол
коммутации. Переключения происходят в соответствии со схемой ab;
ac; bc; ba; ca; cb; ab и т.д. вследствие чего, при непрерывном входном
токе фазный ток оказывается состоящим из импульсов равной
полярности с продолжительностью каждого в 120 эл.град. (
120 -
при учете угла коммутации).
Импульсы разделяются
бестоковой паузой в 60 эл.
град. (
60 - при 0
),
причём однополярные
импульсы тока равных фаз по
порядку их следования имеют
временной сдвиг в 120 эл.град.
Рассматриваемый ста-
тический преобразователь
частоты следует отнести к
классу инверторов тока [68,
69], поскольку первичной
принудительно задаваемой
величиной является фазный
ток, особенности кривой
которого считаются
известными. При заданном
гармоническом составе тока
форма кривой напряжения
может быть получена путем
использования уравнений
равновесия напряжений
синхронной машины,
например в форме диф-
ференциальных уравнений
Парка-Горева (см. 1.1)
Рис. 6.4. Диаграммы напряжений
и токов трехфазного мостового
зависимого инвертора:
а - фазных напряжений;
б - фазных токов;
в - напряжения на вентиле;
г - противо-ЭДС инвертора
указанные величины будут определяться параметрами и режимом
как машин, так и инвертора.
Функционирование вентилей трёхфазного мостового инвертора
при его работе на возбуждённую синхронную машину (pис. 6.3), в
якорной обмотке которой наведена ЭДС вращения, имеет такое же
физическое содержание, что и при работе данного инвертора на
трехфазную сеть переменного тока.
Как видно из диаграммы фазных напряжений и токов инвертора
(рис.6.4), управляемые вентили осуществляют пoочередное
включение двух фаз обмотки статора синхронной машины во
Рис. 6.3. Принципиальная схема бесколлекторного электродвигателя
постоянного тока на основе синхронной
машины и зависимого инвертора:
СД - синхронный электродвигатель;
B1-B6 - управляемые вентили (тиристоры);
- фазорегулятор;
БУВ - блок управления вентилями;
L - индуктивность сглаживающего дросселя
269
268
Запирающее напряжение будет отрицательным, если выходной
переменный ток преобразователя носит опережающий характер
относительно выходного напряжения и временная фаза опережения
достаточно велика.
Угол опережения открывания вентиля
определяет временной
сдвиг в сторону опережения первой гармоники фазного тока
относительно фазного напряжения
2
. (6.1)
Обычно отсчёт угла
производится относительно точек
пересечения кривых фазных напряжений диаграммы напряжений
инвертора (рис. 6.4, а).
Величина запирающего отрицательного напряжения
определяется углом запирания вентиля
(рис. 6.4, в)
sin
Аm1
UU
зап
, (6.2)
где
1Am
U
- амплитуда первой гармоники линейного напряжения на
выходе преобразователя.
Связь между углами опережения и запирания вентилей задаётся
уравнением
. (6.3)
При выбранном
угол коммутации
должен быть таким,
чтобы
min
, (6.4)
где
min
- минимально необходимый угол запирания,
обеспечивающий достаточное на данной частоте время запирания
вентиля
зап
tt
min
min
. (6.4)
В противном случае при невыполнении неравенства (6.4)
условия нормального функционирования вентилей будут нарушены,
и при смене знака прямого напряжения на вентиле последний не
останется в закрытом состоянии. В результате наступит момент,
когда одновременно отпертыми оказываются два вентиля разных
групп, принадлежащие одной фазе. Это явление, называемое
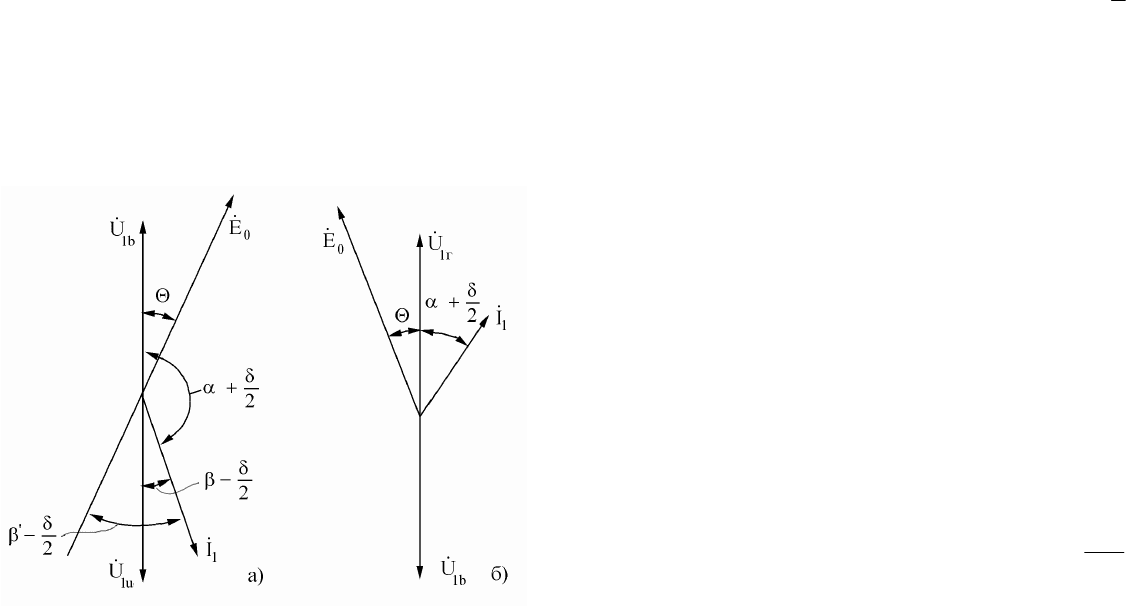
Управляемые вентили позволяют пропускать фазные токи как
встречно соответствующим фазным ЭДС вращения (рис.6.5,а), так
и согласно с ними (рис.6.5,б). При этом в первом случае поток
мощности направлен от преобразователя к синхронной машине и
последняя работает в двигательном режиме, во втором же случае
имеет место генераторный режим синхронной машины, которая
передает мощность через преобразователь (выпрямитель) в цепь
постоянного тока. Последний режим, очевидно, может быть
использован для электрического торможения синхронного двигателя
с рекуперацией энергии торможения.
После окончания пропуска тока через очередной вентиль
напряжение, прикладываемое к нему в прямом направлении, в
течение некоторого промежутка времени должно быть
отрицательным. За этот промежуток вентиль должен полностью
восстановить свое запертое состояние.
Рис. 6.5. Векторные диаграммы совместной работы синхронной
машины с преобразователем частоты: а - в двигательном режиме, б -
генераторном режиме; U
1d
, U
1n
, U
1b
- первая гармоника фазного
напряжения CД и выходного напряжения соответственно, I
1
- первая
гармоника тока фазы СД, Е
0
- ЭДС холодного хода двигателя,
- угол нагрузки СД