Аракелян А.К., Афанасьев А.А. Вентильные электрические машины в системах регулируемых электроприводов. Том 1
Подождите немного. Документ загружается.

291
290
напряжению. Напряжение статора выпрямляется посредством
диодов 13а, 13b и 13с и подается на базу транзистора 16
балансного усилителя. На другой вход этого усилителя, т.е. на базу
транзистора 17, подан сигнал задания с потенциометра.
Управляющее воздействие получается в виде напряжения на
резисторе 24 и создает общее смещение в базовых цепях
транзисторов 6а, 6b и 6с.
Ниже описан вентильный двигатель, основанный на
использовании фототиристоров.
Обобщая результаты анализа датчиков положения по тра-
диционному признаку, можно установить более четко
определившуюся в последние годы предпочтительность
применения индуктивных датчиков, датчиков Холла и магнисторов,
а также некоторое распространение датчиков индукционного
(магнитоэлектрического) типа. Кроме того, может быть отмечена
тенденция к конструктивному слиянию двигателей и датчиков
положения.
Однако детальное рассмотрение систем ВД позволяет
установить, что при достаточно высоких требованиях к системе
электропривода применение обратной связи по пути в чистом виде
оказывается недостаточным.
Так, в примерах, рассмотренных выше, могут быть отмечен
ряд особенностей:
1. В резонансном индуктивном датчике по рис. 6.9 оказалось
необходимым применение магнитных усилителей, рабочие обмотки
которых включены последовательно с компенсационными, а
обмотки управления включены в цепи транзисторов, управляемых
в противофазе. Между рабочими стержнями датчика включены
дополнительные стержни. Сигнал о положении ротора двигателя
оказывается недостаточным для его удовлетворительной работы
(в рамках конкретных технических требований к
электрифицируемой машине).
2. Возможность использования индукционных датчиков, вообще
говоря, свидетельствует о допустимости (а может быть, и
целесообразности) использования сигнала, несущего информацию
не только о положении, но и о скорости вращения ротора. Вопрос о
корректировки частоты вращения двигателя используется
отрицательная обратная связь по обратной ЭДС двигателя
(рис.6.11,б).
Магнисторы. К числу датчиков, основанных на изменении
активного сопротивления под действием магнитного поля, относим
магнитосопротивления и магнитодиоды. Принцип действия датчиков
магнитосопротивления состоит в том, что электропроводность
полупроводника, помещенного в магнитном поле, зависит от
напряженности этого поля. Чувствительность магнитосопротивления
определяется относительным изменением активного сопротивления,
которое у лучших образцов достигает 10-15.
Магнистор является кремниевым диодом, сопротивление
которого в проводящем направлении, будучи достаточно высоким,
изменяет свою величину под действием магнитного поля, которое
перемещает запирающий слой и изменяет скорость рекомбинации
носителей зарядов.
Триодный магнистор представляет собой комбинацию в одном
монокристалле диодного кремниевого магнистора и транзистора,
причем магнистор используется для управления базовым током
транзистора. Как диодные, так и триодные кремниевые магнисторы
соединяются в нулевые и мостовые дифференциальные схемы.
Выпрямляющие свойства кремниевых магнисторов позволяют
применять их на переменном токе, получая выходной сигнал в виде
выпрямленного тока.
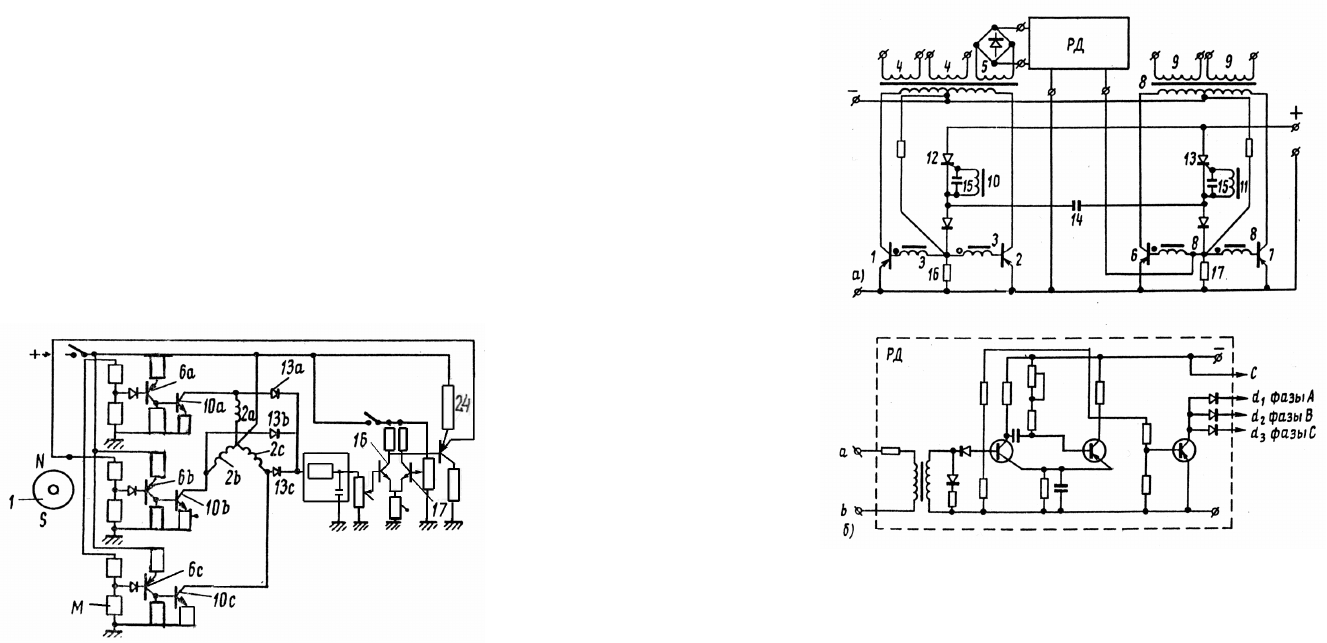
В системе, представленной на рис. 6.12, ротор 1 с постоянными
магнитами вращается в магнитном поле статора, которое создается
обмотками 2a, 2b, 2c, питающимися от источника постоянного тока
через транзисторы 10а, 10b и 10с, которые в свою очередь
управляются трантранзисторами 6а, 6b и 6с, образуя с ними
каскадное соединение. На входах транзисторов 6а, 6b и 6с по
дифференциальным схемам включены кремниевые магнисторы М,
на которые воздействует магнитное поле постоянных магнитов
ротора 1. Магнитное поле изменяет сопротивления магнисторов
таким образом, что транзисторы соответствующей обмотки
отпираются и обмотка получает питание. Для стабилизации
частоты вращения ротора 1 применена обратная связь по
293
292
Коммутатор устройства выполнен в виде трехфазной мостовой
схемы, к выходу которой подключена обмотка статора двигателя.
Первый мультивибратор на транзисторах 1 и 2 и
трансформаторе 3 с выходными 4 и дополнительной 5 обмотками
обеспечивает включение первого транзистора в плечо коммутатора
и запирание второго. Второй мультивибратор на транзисторах 6, 7
и трансформаторе 8 с выходными обмотками 9 обеспечивает
включение второго транзистора в плечо коммутатора и запирание
первого. Мультивибраторы синхронизированы от датчика
положения ротора обмотками 10, 11 при помощи статического
триггера на тиристорах 12, 13 и конденсаторе 14. Входные цепи
Рис. 6.13. Система с получением дополнительного сигнала,
пропорционального скорости: а - схема одной фазы промежуточного
усилителя; б - схема ждущего мультивибратора, используемого в
качестве регулятора длительности, РД - регулятор
длительности импульсов
наблюдаемости управляемой системы электродвигателя решается
путем поиска частных технических решений, удовлетворяющих
комплексам технических требований, часто не конкретизированных
в виде списка.
3. В системы с датчиками Холла как правило вводятся
дополнительные обратные связи по противо-ЭДС (скорости)
двигателя.
4. В системах с магнисторами, например по рис. 6.12 вводится
обратная связь по напряжению.
Итак, датчик положения сам по себе, по-видимому, не
обеспечивает удовлетворительной работы вентильного двигателя.
Вот почему появились конструкции, в которых, помимо датчика
положения, на вал двигателя устанавливается также тахогенератор.
В дальнейшем стало ясно, что для получения сигнала,
пропорционального скорости, можно использовать сигнал,
поступающий от датчика положения ротора. Так, в системах, где
используется транзисторный коммутатор, управляемый
непосредственно от датчика положения ротора, для получения
сигнала, пропорционального скорости, оказывается возможным
использовать дополнительную обмотку одного из
мультивибраторов промежуточного усилителя, подключив ее на
вход регулятора длительности импульсов через выпрямитель.
Схема такого устройства представлена на рис. 6.13.
Рис. 6.12. Система с магнисторами
295
294
увеличить ошибки в канале управления. Наиболее точно судить о
нагрузке можно, только вводя в систему датчик момента. Обычно
это сложные устройства, и поэтому как правило используется
обратная связь по току.
6. При необходимости вводится обратная связь по току.
По-видимому, могут быть выявлены примеры введения также
и других обратных связей. Важно констатировать, что в
совершенных конструкциях датчик положения дополняется
некоторыми другими датчиками или преобразователями,
позволяющими ввести в схему управления также и производные
обобщенных координат системы. Разумеется, целесообразность
этого зависит от комплекса технических требований и принятой
компоновки вентильного двигателя.
6.3. Виды силовых схем коммутаторов (преобразователей
частоты) электроприводов с вентильными двигателями
6.3.1. Общие положения
Коммутаторы электроприводов с вентильными двигателями
по характеру структуры делятся на коммутаторы: с
промежуточным источником (звеном) постоянного тока без
промежуточного источника постоянного тока.
По способу коммутации - на коммутаторы с принудительной
коммутацией при помощи отдельного тиристорного или
транзисторного коммутирующего устройства, и с естественной
коммутацией, основанной на действии противо-ЭДС двигателя.
Схемы принудительной коммутации можно разделить на три
группы: с последовательной коммутацией фаз, с общей коммутацией
и с индивидуальной коммутацией.
По коммутирующему элементу (ключу) - на коммутаторы
тиристорные, транзисторные, герконовые и т.п., в том числе
современные.
По способу управления напряжением на выходе инвертора - на
коммутаторы: с фазовым управлением ключами промежуточного
выпрямителя и инвертора, с импульсным (в частности, с широтно-
импульсным управлением ключами).
тиристров 12,13 шунтированы конденсаторами 15. Анодными
сопротивлениями триггера служат базовые сопротивления 16,17
мультивибраторов.
Сигналы датчика положения с обмоток 10, 11 переключают
тиристоры 12, 13 с частотой, соответствующей скорости вращения
двигателя, а падение напряжения на сопротивлениях 16, 17 от
анодного тока тиристоров подавляет возбуждение
мультивибраторов, обеспечивая переключение соответствующих
транзисторов коммутатора.
К базовому сопротивлению 17 одного из мультивибраторов
подключен также выход регулятора длительности импульсов РД,
на вход которого через выпрямитель присоединена обмотка 5
первого мультивибратора.
Регулятор длительности РД позволяет дополнительно запирать
второй мультивибратор на интервалах, когда он должен быть
включен сигналом датчика. Это позволяет регулировать фазный
ток, а значит, и скорость вращения двигателя.
В качестве регулятора длительности используется обычная
схема ждущего мультивибратора. Его вход через импульсный
трансформатор подключен к точкам, а, b (см. рис. 6.13, б), а выходы
с, d
1
, d
2
, d
3
- к базовым сопротивлениям одного из мультивибраторов
промежуточных усилителей в каждой фазе коммутатора.
При определенной длительности импульсов на выходе
регулятора с изменением скорости, а значит, и частоты импульсов
на входе регулятора изменяется скважность напряжения на выходе
коммутатора.
5. Таким образом, может быть сформулирована еще одна
особенность применяемых датчиков положения, использование в
ряде устройств имеющихся возможностей по преобразованию
сигнала датчика положения в сигнал, пропорциональный скорости.
Следующим шагом, если рассматривать развитие конструкций
в аспекте представлений об управляемости и наблюдаемости,
должно было бы быть введение обратной связи по моменту, а для
построения инвариантной системы - по нагрузке. Здесь, однако,
встречаются значительные трудности. Действительно, дважды
дифференцируя сигнал на выходе положения, можно существенно
297
296
переключения несущей частоты определяются не величиной рабочей
частоты инвертора, а совокупностью трех величин: рабочей частоты
инвертора, длительности паузы и длительности импульса. В каждой
рабочей точке происходит измерение этих величин и выбирается
оптимальное отношение между несущей и рабочей частотами.
Оптимизация предусматривает, например, обеспечение такого
гармонического состава, при котором коэффициент использования
непосредственно двигателя оказывается максимальным.
Возможности всех способов модуляции ограничены частотными
свойствами тиристоров. Обычные тиристоры имеют такие значения
времени выключения, что несущая частота не может превосходить
720 Гц, а рабочая частота инвертора без ШИМ при
шестиступенчатой форме выходного напряжения ограничивается
частотой 120 Гц. Новые высокочастотные запиральные (GTO)
тиристоры и другие современные элементы силовой электроники
(IGBT, MOSFET и др.) позволяют увеличить несущую частоту и
рабочий диапазон частот инвертора до 200 при условии подавления
низкочастотных составляющих в выходном напряжении.
Увеличение несущей частоты улучшает гармонический состав
выходного напряжения. На низких частотах целесообразно получать
24-ступенчатую, а на средних частотах - 12-ступенчатую форму
выходного напряжения.
Высокое качество напряжения, генерируемое инвертором с
ШИМ на низких и средних частотах (до 140 Гц), обеспечивает
хорошие характеристики двигателей, уменьшает потери в них. На
более высоких частотах (до 200 Гц) инвертор с ШИМ обеспечивает
модулированную шестиступенчатую форму выходного напряжения
с меньшим содержанием пятой и седьмой гармоник, чем в обычной
немодулированной кривой [12].
Достоинством системы с адаптивным способом модуляции
является возможность автоматического перехода в процессе
регулирования с одной формы кривой на другую для обеспечения
наилучшего гармонического состава.
Возможности импульсного управления тщательно изучаются
также и в направлении непосредственного использования в системах
электропривода с вентильными двигателями. Сигнал импульсного
Вообще говоря, особенности коммутаторов являются во
многом общими с особенностями приводов переменного тока с
частотным управлением, которые широко освещены в учебной
научно-технической литературе [67-70]. Специфические
особенности отражены в [153].
Решение дифференциальных уравнений, справедливых на
интервалах проводимости вентилей коммутаторов, при учете
соответствующих начальных условий позволяет получить
временные функции напряжений и токов в процессе коммутации, из
которых при известных параметрах вентилей и нагрузки можно
получить соотношение размеров коммутирующих реактивных
элементов L и С, а также нагрузку вентилей.
Существенное улучшение формы кривой выходного
напряжения достигается при геометрическом суммировании
напряжений нескольких инверторов на специальном
трансформаторе. Регулирование выходного напряжения при этом
осуществляется либо изменением фазового угла между
отдельными инверторными блоками, либо с помощью ШИМ.
Улучшение формы кривой достигается усложнением и повышением
стоимости схемы. Следует отметить, что величина гармонических
составляющих быстро увеличивается при уменьшении выходного
напряжения и практический диапазон регулирования напряжения
(частоты) не превышает 3:1 или 4:l [33, 34].
Применение ШИМ в инверторе позволяет регулировать
частоту и величину выходного напряжения одним и тем же силовым
комплектом управляемых вентилей и улучшить форму выходного
напряжения без выходного трансформатора. Диапазон совместного
регулирования напряжения и частоты в подобных коммутаторах
достигает 200:1. Инвертор с ШИМ работает от источника
фиксированного напряжения постоянного тока, и, поскольку
регулирование осуществляется внутренними средствами самого
инвертора, его быстродействие значительно превосходит
быстродействие традиционных схем. В инверторе с ШИМ воз-
можно несколько способов модуляции: с постоянным отношением
несущей и рабочей частот, с переменным отношением и с
самонастраивающимся отношением. В последнем случае точки
299
298
Если имеются три реверсивных ВИ и на их входы поданы
синусоидальные сигналы с одинаковой амплитудой и сдвигом на 1/3
периода, то образуется симметричный трехфазный источник с
регулируемой частотой и амплитудой, который может быть
использован для питания трехфазной обмотки якоря.
Коммутация тиристоров ВИ - естественная, под действием
напряжения источника питания.
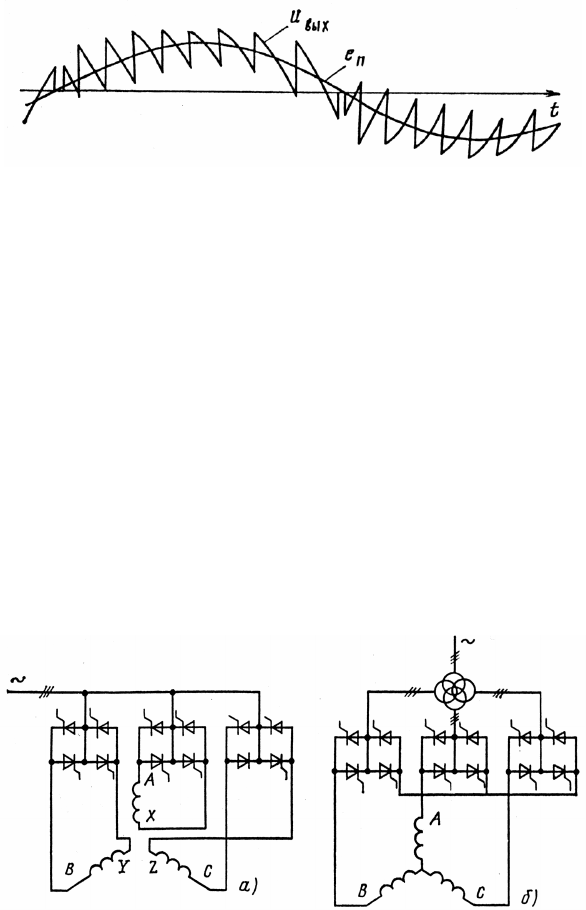
Для питания трехфазной обмотки якоря используются три ВИ;
возможные варианты схемы цепей якоря показаны на рис.6.15. В
варианте рис. 6.15, а фазы якоря изолированы друг от друга, питание
же трех ВИ осуществляется от общего трехфазного источника:
трансформатора.
В варианте рис.6.15,б фазы якоря соединены, друг с другом,
например по схеме Y, но для питания ВИ необходимы три
Рис. 6.14. Выходное напряжение ВИ, входящего в НПЧ, и его гладкая
составляющая
Рис. 6.15. Схемы главных цепей СД с НПЧ:
а - изолированное питание обмоток, б - трехпроводноя схема
управления при этом вводится в цепи управления коммутатора
вентильного двигателя, в результате чего электропривод с
вентильным двигателем по габаритам и энергетическим
показателям лишь незначительно уступает коллекторному
электроприводу, а по надежности значительно превышает последний.
Рассмотрим некоторые примеры преобразователей частоты
для электропривода с вентильным двигателем.
6.3.2. Основные виды преобразователей частоты
В электроприводах переменного тока используется немало
видов ПЧ. Рассмотрим в начале такие виды ПЧ, которые нашли
широкoe применение или перспективны для питания якоря СД в
регулируемом электроприводе с вентильным двигателем [69, 153].
Непосредственный преобразователь частоты (НПЧ) [110]
представляет собой совокупность нескольких реверсивных
комплектов тиристорных преобразователей, выполненных по
системе выпрямитель-инвертор (ВИ), таких же, какие используются
в электроприводах постоянного тока.
Когда реверсивный ВИ работает в установившихся режимах
постоянного тока, его характеристика "вход-выход" при
определенных условиях может считаться линейной
упп
UKE
,
где Е
п
- эквивалентная ЭДС выходной цепи ВИ (гладкая
составляющая);
U
у
- управляющее напряжение, воздействующее на вход DB;
K
п
- коэффициент усиления ВИ.
Когда управляющее напряжение изменяется не слишком
быстро, такая зависимость сохраняется; если управяющее
напряжение синусоидально
tUu
m
sin
уу
и частота его много ниже частоты источника питания, то и
эквивалентная ЭДС будет синусоидальной (pис. 6.14):
tEe
m
sin
пп
.
Будет синусоидальной и гладкая составляющая выходного
напряжения.
301
300
напряжении характеристика вход-выход ВИ в режиме непрерывного
тока линейна. Используют также пилообразное опорное напряжение,
при этом иногда для линеаризации характеристики вход-выход
вводят управляющее напряжение через нелинейный элемент.
Для открывания тиристоров ВИ СИФУ может формировать
либо короткие (10-15°), либо длинные импульсы (свыше 60°); вместо
длинных импульсов часто используют длинные пачки коротких
импульсов. Вариант СИФУ с длинными импульсами предпочтителен
с точки зрения работы НПЧ.
Реверсивный ВИ выполняется либо с совместным, либо с
раздельным управлением комплектами тиристоров [176]. Чаще
всего используется раздельное управление. При таком способе
управляющие импульсы на тиристоры одного из мостов подаются
только тогда, когда закрыты все тиристоры другого моста.
Частота выходного напряжения может изменяться от нуля
включительно, при этом режим нулевой частоты - постоянного тока
- вполне допустим для ВИ. Но по мере увеличения выходной частоты
ухудшается гармонический состав выходного напряжения НПЧ и
токов, потребляемых им от источника питания; загрузка тиристоров
становится неравномерной; для сглаживания пульсаций токов якоря
необходимы индуктивности; часть их составляют индуктивности
рассеяния якоря. При росте частоты растет и напряжение на этих
индуктивностях, режим электропривода становится весьма
неэкономичным. Эти обстоятельства (особенно последнее)
ограничивают сверху частотный диапазон уровнем 1/4-1/3 частоты
источника у шеститактных преобразователей, 1/3-1/2 у
двенадцатитактных.
Каждый ВИ, входящий в НПЧ, потребляет от источника
реактивную мощность. Потребление реактивной мощности тем
больше, чем меньше выходное напряжение. Поскольку напряжение
каждого ВИ в течение периода дважды проходит через нуль,
коэффициент мощности НПЧ при описанном методе управления
оказывается довольно низким [82].
Инвертор напряжения с широтно-импульсной модуляцией
(ИН с ШИМ) [68] становится весьма перспективным видом ПЧ
для питания маломощных (до 10 кВт) СД. Собственно ИН с ШИМ
преобразует постоянное напряжение в напряжение регулируемой
изолированных друг от друга источника - три трехфазных обмотки
трансформатора.
Собственно ВИ электроприводов средней мощности обычно
выполняется из двух трехфазных тиристорных мостов, соединенных
встречно-параллельно, как и показано на рис. 6.15. Схема является
шеститактной.
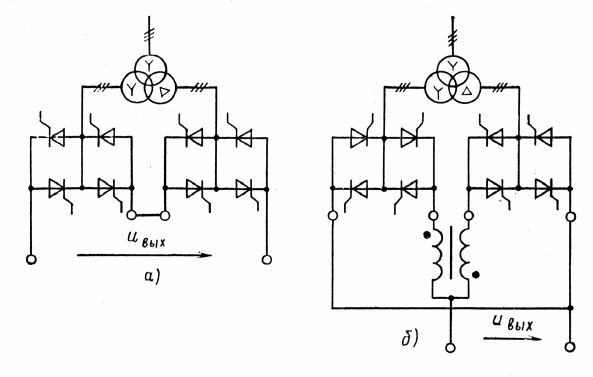
Для электроприводов большой мощности (свыше 1-5 МВт)
используются ВИ по двенадцатитактной схеме: последовательной
(рис. 6.16,a) или параллельной (рис. 6.16,б). В этом диапазоне
мощностей используются часто также более сложные обмотки
якоря [33, 34].
Вопрос о выборе варианта схемы главных цепей тесно связан
со свойствами электропривода, он будет рассмотрен в гл. 10.
Формирование управляющих импульсов в НПЧ для тиристоров
каждого из ВИ осуществляется системой импульсно-фазового
управления (СИФУ). В большинстве случаев используются СИФУ,
работающие по методу вертикального управления [176]. В каждом
канале такой СИФУ осуществляется сравнение входного
управляющего напряжения с периодическим опорным напряжением
частоты источника питания. При синусоидальном опорном
Рис. 6.16. Схемы двенадцатитактных НПЧ: а - последовательная,
б - параллельная
303
302
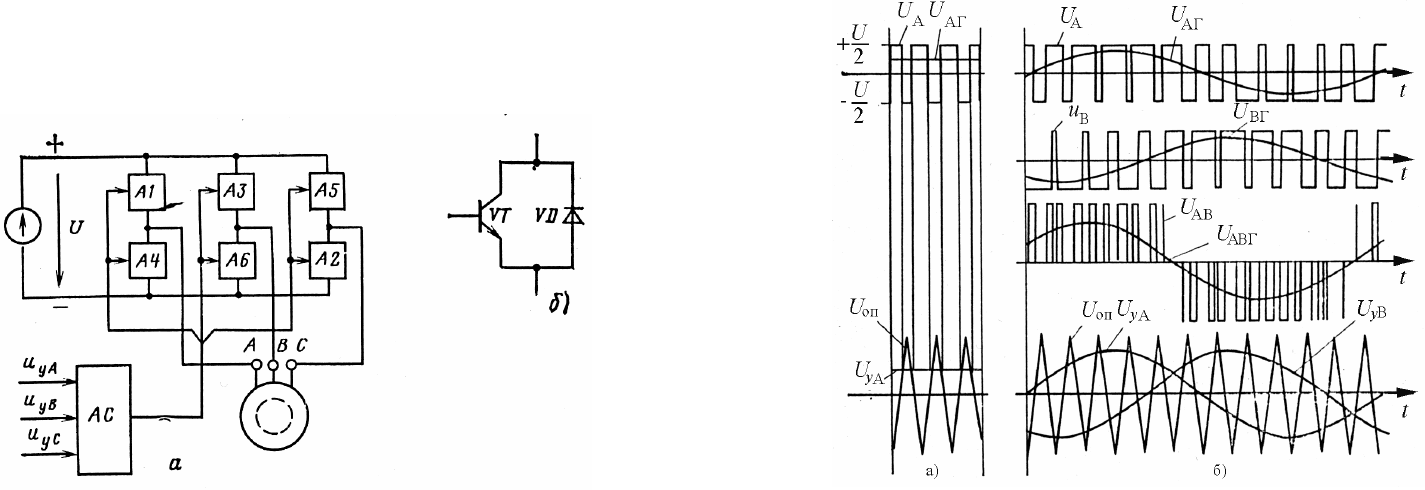
Каждая пара ключей (А1-А4, A3-А6, А5-А2) с определенной
периодичностью (период модуляции) переключается. Если рассмат-
ривать, например, потенциал точки А, то при включенном ключе
А1 этот потенциал максимален, а при выключенном ключе
минимален. Средний за период потенциал зависит от относительной
продолжительности включения ключей. Когда эта
продолжительность во времени не изменяется (диаграмма
рис.6.18,a), потенциал точки А содержит постоянную
составляющую, которая представляет собой полезную, гладкую
составляющую потенциала. На эту составляющую наложены
пульсации с частотой модуляции.
Если относительная продолжительность включения ключей А1-
А4 за счет управления от периода к периоду изменяется, то
изменяется во времени гладкая составляющая потенциала. При
соответствующем управлении эта гладкая составляющая может
быть синусоидальной (рис. 6.18, б).
Рис. 6.18. Временная диаграмма ИН с ШИМ
частоты и амплитуды. В тех случаях, когда ПЧ должен питаться
от источника переменного напряжения, в его состав должен
дополнительно входить ВИ с фильтром для получения постоянного
напряжения. Силовая цепь ИН с ШИМ образуется полностью
управляемыми ключевыми элементами (рис.6.17,б), для
трехфазного якоря используются шесть ключей по мостовой схеме
(рис.6.17,а). Ключ должен не только открываться, но и за-
крываться по сигналам управления. Если в ключах используются
обычные полууправляемые тиристоры, то необходимы
дополнительные элементы для искусственной коммутации, и ПЧ
оказывается весьма громоздким. Наиболее перспективны ИН с
ШИМ на основе полностью управляемых полупроводниковых
приборов: двухоперационных тиристоров или силовых транзисторов
IGBT и др.
В настоящее время рабочие напряжения таких приборов
доведены до 1 кВ и выше, а максимальные токи - до 500 А, это
обеспечивает указанный диапазон мощностей. Частота
переключения полностью управляемых приборов может быть
установлена до 10 кГц, что обеспечивает частотный диапазон СД
до 500-1000 Гц. Помимо транзистора (или двухоперационного
тиристора) ключ содержит также диод для обратного тока.
Рис. 6.17. Схема главных цепей СД, питаемого от ИН с ШИМ

305
304
Схема главной цепи ПЧ с ЗИТ представляет собой
совокупность двух нереверсивных тиристорных ВИ, один из
которых UV подключен к источнику питания (трансформатору,
генератору), другой UZ (собственно ЗИТ) - к якорю СД (рис. 6.19).
В промежуточной цепи постоянного тока включен сглаживающий
реактор L. В двигательном режиме СД преобразователь UV
работает выпрямителем, он передает энергию от источника в цепь
постоянного тока. Преобразователь UZ работает как инвертор, он
передает энергию из цепи постоянного тока в якорь СД. В тормозном
режиме СД преобразователь UZ переходит в выпрямительный
режим, a преобразователь UV - в инвенторный.
Преобразователь UZ, как и любой ВИ, подключенный к
источнику, работает во всех режимах с естественной коммутацией
вентилей от напряжения источника. В ЗИТ (преобразователь UZ)
коммутация естественная от ЭДС вращения СД. Необходимая для
работы ЗИТ реактивная мощность поступает от СД, который
должен работать как источник реактивной мощности, т. е. с
опережающим током якоря.
Индуктивность сглаживающего реактора достаточно велика,
и ток в звене постоянного тока в установивших режимах
действительно близок к постоянному. Этот ток переключается
тиристорами ЗИТ из фазы в фазу якоря СД. Фазные токи i
sA
, i
sB
, i
sC
трехфазного якоря принимают вид, показанный на рис. 6.20. Здесь
обозначения вентилей соответствуют рис.6.19. Большую часть
периода ток проходит по двум из трех фаз якоря, только на коротких
коммутационных интервалах - по трем фазам.
Рис. 6.19. Схема главных цепей СД, питаемого от ПЧ с зависимым
инвертором тока
Управление ИН с ШИМ может осуществляться, как и НПЧ, по
принципу вертикального управления. Для каждой пары ключей в
системе управления предусмотрен канал формирования открывающих
импульсов. На все эти каналы подается общее опорное напряжение -
пилообразное напряжение с частотой модуляции
tu
оп
. На рис.6.18, a
показан частный случай симметричного пилообразного напряжения.
На вход каждого канала поступает управляющее напряжение
yCyByA
uuu ,,
. Управляющее напряжение сравнивается с опорным
напряжением
оп
u
, в результате чего формируются открывающие
импульсы. Например, канал А работает по таким условиям:
A1uu
yA
оп
открыт, А4 закрыт;
A1uu
yA
оп
закрыт, , А4
открыт. Очевидно, что при этом гладкая составляющая, потенциала
точки А (относительно условной средней точки источника постоянного
напряжения) пропорциональна управ-ляющему напряжению
AA
KuU
уГ
,
где К - коэффициент пропорциональности.
Потенциалы выводов якоря U
A
, U
B
, U
C
переключаются от -U/2
на +U/2, где U - напряжение источника. Что каcается линейных
напряжений, то каждое из них может принимать одно из значений: -
U, 0, +U. При общем опорном напряжении каналов управления имеет
место частный случай: линейное напряжение переключается от 0 до
+U, когда гладкая составляющая положительна, и от 0 до -U, когда
гладкая составляющая отрицательна (рис.6.18,б). Таким образом,
модуляция линейных напряжений однополярная; при этом
существенно уменьшаются пульсации токa якоря.
Для снижения коммутационных потерь энергии желательно иметь
частоту модуляции f
м
как можно более низкой. Однако имеются
обстоятельства, которые ограничивают снизу частоту модуляции. Во-
первых, при малом отношении частоты модуляции к максимальной
рабочей частоте f
s max
затруднено сглаживание токов якоря. Во-вторых,
при малом отношении частот неблагоприятно влияет дискретный
характер управления ИН с ШИМ. Поэтому обычно отношение частот
принимают по условию
2010
max м
s
ff
.
Преобразователь частоты с зависимым инвертором тока
[69] широко применяется для питания скорее СД, особенно
быстроходных.
307
306
регулирования скорости при значительной верхней частоте, может
быть использован так называемый токовый НПЧ [68, 110] - вариант
ПЧ, который работает при низких выходных частотах как НПЧ, а
при высоких - как ЗИТ.
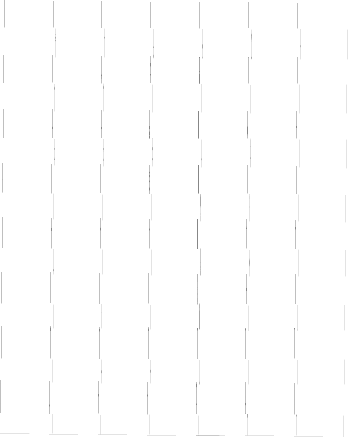
Находят применение также некоторые рациональные схемы
силовых тиристорных преобразователей на основе
полууправляемых вентилей (рис. 6.21). Коммутация двигателя 1 в
схеме а осуществляется при помощи инвертора 5 на тиристорах,
питающегося от источника постоянного тока. Для запирания в
требуемые моменты времени тиристоров в инверторе используются
трехфазный мост на диодах 6, подключенный со стороны
переменного тока инвертора, и тиристоры 7 и 8. Подача импульсов
на запирание осуществляется от источника 9 через ключ 10. Схема
предусматривает управление в функции положения ротора 2, с валом
которого связан датчик положения 3. Устройство 4 предназначено
для выработки управляющих импульсов как для тиристоров
инвертора, так и для тиристоров 7 и 8.
Схемы б и в работают аналогично. В этих схемах может быть
осуществлено питание как в режиме источника тока, так и в режиме
источника напряжения.
Некоторые работы посвящены улучшению регулировочных и
энергетических характеристик преобразователей частоты для
электроприводов с вентильными двигателями. Так, например, в [70]
ставится вопрос о том, чтобы схемным путем достичь увеличения
надежности работы вентильных двигателей.
Дело в том, что при случайных толчках нагрузки вентильных
двигателей, по схемам рис. 6.19, 6.21 нарушается коммутация тока
между фазами статора из-за их большого (по сравнению с
трансформатором) реактивного сопротивления.
Фазы двигателя обтекаются током так же, как в фазах
трансформатора по мостовой схеме. Для того чтобы обеспечить
переход номинального тока с фазы на фазу двигателя, необходим
большой угол опережения отпирания вентилей (
40 и выше). Чтобы
коммутировать толчки тока или аварийные токи, необходимы еще
большие углы опережения отпирания. Но сдвиг угла опережения
приводит к уменьшению вращающего момента двигателя. Это
Общие свойства электроприводов с ЗИТ обусловлены
принципом работы. Форма фазных токов якоря заметно отличается
от синусоидальной. Из-за этого повышены пульсации
электромагнитного момента СД.
Условия коммутации тиристоров ЗИТ накладывают
ограничения на режимы СД, из-за этого несколько yxyдшаются
массо-габаритные и энергетические показатели двигателя.
Преобразователь частоты с ЗИТ позволяет получить
достаточно высокую выходную частоту, при современных
тиристорах - до 1000-5000 Гц.
Диапазон регулирования скорости сравнительно невелик - до
10:1, при малых угловых скоростях ЭДС вращения недостаточна
для коммутации тиристоров ЗИТ.
Чтобы обеспечить трогание привода с места и начало разбега,
приходится применять специальные меры. Можно выполнить
коммутацию тиристоров ЗИТ, если к началу коммутации перевести
преобразователь UV в инверторный режим и с максимальной
интенсивностью погасить
ток в звене постоянного тока.
Коммутация тиристоров ЗИТ
производится при отсутствии
тока. Момент двигателя и
ток, потребляемый пре-
образователем UV от
источника, при этом также
нулевые.
Следовательно, работа
СД с ЗИТ на малых
скоростях сопровождается
очень большими пуль-
сациями момента и тока,
потребляемого от сети.
Длительно такой режим
недопустим.
Чтобы обеспечить
повышенный диапазон
Рис. 6.20. Диаграмма тока якоря СД
при питании от зависимого
инвертора тока
309
308
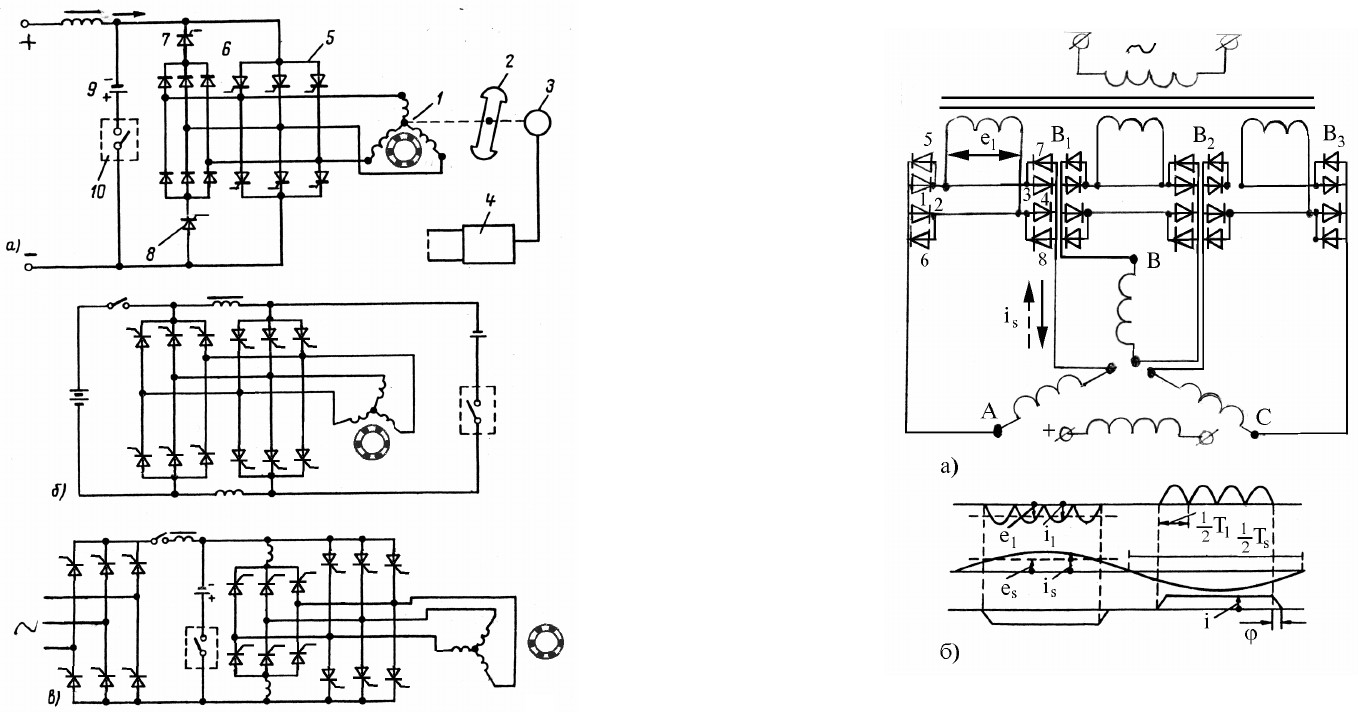
быть применена и трехфазная. Число выпрямительных устройств
В1, В2 и В3 соответствует числу фаз статора. Последние не имеют
между собой электрической связи. Каждое выпрямительное
устройство имеет две группы вентилей, обеспечивающих
протекание выпрямленного тока в фазах двигателя в прямом и
обратном направлениях. Так, в выпрямительном устройстве В1
группа вентилей 1, 2, 3 и 4 образует нормальную мостовую схему
и обеспечивает протекание выпрямленного тока в фазе двигателя
в одном направлении, а группа вентилей 5, 6, 7 и 8 аналогичным
Рис. 6.22. Электрическая схема (а) и форма питающего
напряжения (б) вентильного двигателя в электроприводе с
раздельным питанием фаз статора
обстоятельство часто ограничивает применение вентильных
двигателей.
На рис. 6.22, а показана свободная от упомянутых недостатков
схема вентильного двигателя, у которого каждая фаза статора
питается самостоятельно. Вторичные обмотки трансформатора
соединены с группой вентилей и образуют выпрямительное
устройство. Показана однофазная схема, но, разумеется, может
Рис. 6.21. Часто применяемые схемы в САР с ВД средней и малой