Appel W. Mathematics for Physics and Physicists
Подождите немного. Документ загружается.

Solution of the problem 487
The potential χ is o f the form
χ(r) =
A
r
cosh µr +
B
r
sinh µr for all R
1
< r < R
2
,
and moreover satisfies χ(R
1
) = χ(R
2
) = V , which leads to the system of equations
¨
A e
−µR
1
+ B e
µR
1
= R
1
V ,
A e
−µR
2
+ B e
µR
2
= R
2
V .
Solving this linear system, we obtain
χ(r) =
V
r sinh(µ∆R)
R
1
sinh µ(R
2
− r) + R
2
sinh µ(r − R
1
)
with ∆R = R
2
− R
1
. Then, differentiating, we get th e values of the electric field on
the left and on the right of R
1
, and the difference is
E(R
+
1
) − E(R
−
1
) =
∂ϕ
∂ r
r=R
1
−
∂χ
∂ r
r=R
1
= µV
coth µR
1
+ coth µ∆R −
R
2
R
1
sinh µ∆R
=
σ
ǫ
0
.
Thus, for small µ, we have
σ =
µ
2
V ǫ
0
6
R
2
R
1
(R
1
+ R
2
).
The total charge is therefore
Q = 4πR
2
1
σ =
2π
3
µ
2
V R
1
R
2
ǫ
0
(R
1
+ R
2
).
5. With the data in the text, since Q ¶ 10
−9
C, we obtain µ
−1
¾ 6 m, or, adding
correctly the proper factors }h and c,
µ ¶ 3. 10
−43
kg,
which is a very remarkable result. (Compare, for instance, with the elect ron mass
m
e
= 9.1 ·10
−31
kg.)
488 Differential forms
Sidebar 6 (Integra tion of differential forms) Let ω be a differential k-form.
In R
k
, it would be easy to give a meaning to the integral of ω on (a subset of) R
k
(see Definition 17.33, pa ge 471).
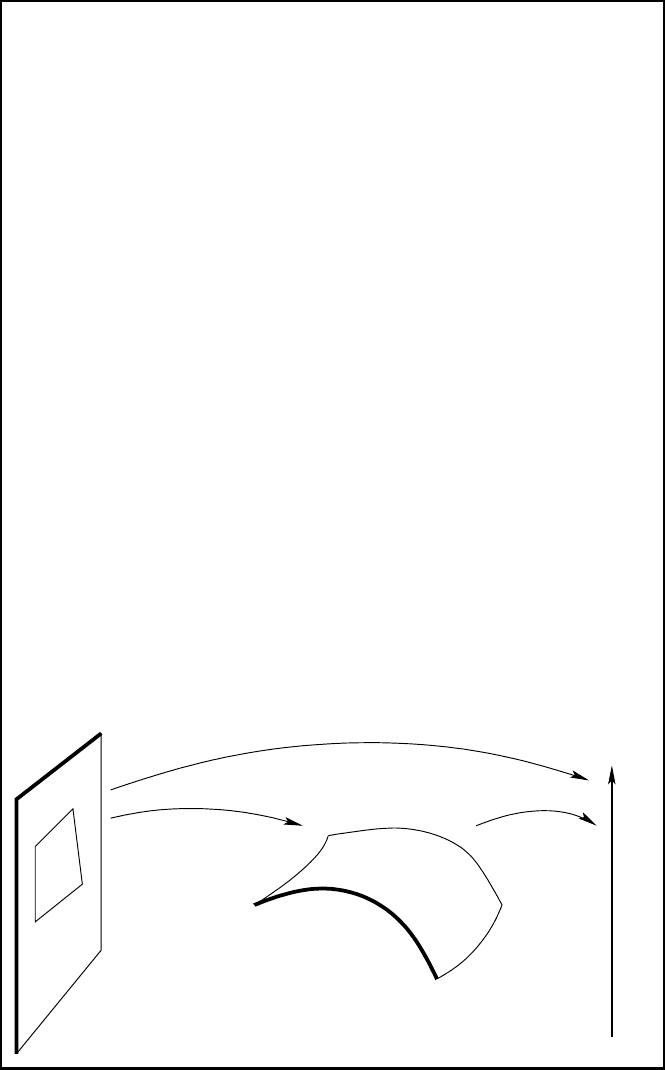
In order to define the integral of ω on a k-dimensional “surface” S (also called
a k-dimensional manifold), one starts by transforming S into a ma nifold ∆,
which is indeed a subset of R
k
, by means of a change of coordinates. Let f denote
the inverse change of coordinates, that is, the map from ∆ ⊂ R
k
into S :
f : ∆ −→ S ⊂ R
n
,
x 7−→ f ( x).
A point x ∈ R
k
in the space R
k
is mapped to f ( x). How are the tangent
vectors in R
k
transformed? Since tangent vectors correspond to “differences between
two p oints of R
k
,” the image by the change of coordinates of a vector v attached
to the point x will be v 7→ d f
x
. v, that is, the result of evaluating the differential
form d f
x
(given by the differential of f at the point x) at the vector v. It is often
customary to write f
∗
= d f the differential of f (without indicating precisely at
which point it is considered).
From the change of coordinates, a k-differential form on ∆, the “inverse image
of ω by f ,” which is denoted f
∗
ω, may be defined by pu tting
( f
∗
ω) : (R
k
)
k
−→ R,
( v
1
, . . . , v
k
) 7−→ f
∗
ω( v
1
, . . . , v
k
)
def
= ω( f
∗
v
1
, . . . , f
∗
v
k
).
Using the definition of the integral of a dif ferential k-form on R
k
, it is then possible
to define:
Z
S
ω
def
=
Z
∆
f
∗
ω.
Of c ourse, this definition can be shown to be independent of the choice of f .
R
k
R
n
S
∆
f ω
f
∗
ω
R

Chapter
18
Groups
and group representations
18.1
Groups
DEFINITION 18.1 A group (G, ·) is a set G with a product law “·” defined on
G ×G, such that
1. “·” is associative: (g · h) ·k = g ·(h ·k) for all g, h, k ∈ G;
2. (G, ·) has an identity element e, that is, an element of G such that
e · g = g · e = g for any g ∈ G;
3. any element in G is invertible, that is, for any g ∈ G, there exists an
element h ∈ G such that g · h = h · g = e. This element is unique; it is
denoted g
−1
and is called the inverse of g.
DEFINITION 18.2 A group (G, ·) is abelian or commutative if the product
law is commutative, that is, if g ·h = h · g for any g, h ∈ G. An abelian group
is often denoted additively: one writes g + h instead of g · h.
490 Groups and group representations
For commutative groups, the definition can thus be rephrased as follows:
DEFINITION 18.3 An additive group is a pair (G, +) such that
1
′
. “+” is an addition law on G, which is associative and commutative;
2
′
. (G, +) has an identity element 0
G
such that
∀g ∈ G 0
G
+ g = g + 0
G
= g;
3
′
. any G is invertible, that is, for any g ∈ G, there e xists an element
h ∈ G such that g + h = h + g = 0
G
. This element is d enoted −g and
is called the opposite of g.
Example 18.4 The set GL
n
(R) of invertible square matrices w ith real coefficients of size n, with
the law given by the product of matrices, is a group; for n ¾ 2, it is non-abelian.
Example 18.5 The set of symmetries of a molecule, with the law given by composition of
maps, is a group.
Example 18.6 The set of rotations of t he vector space R
2
(rotations fixing the origin) is a
commutative group.
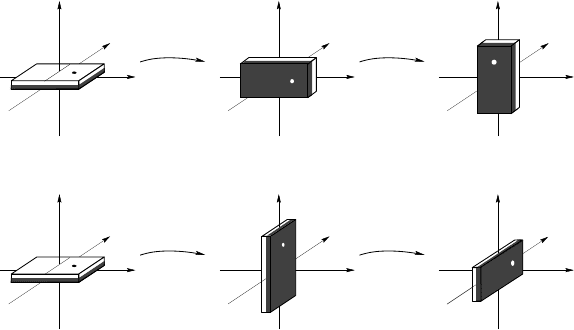
Example 18.7 Consider t h e oriented space E = R
3
with its euclidean structure. Let G denote
the set of rotations of E centered at the origin 0. Then (G, ◦) is a noncommutat ive group.
Indeed, if R
x
denotes the rotation with axis O x and angle π/2, and if R
y
denotes the rotation
with axis Oy and angle π/2, the following transformations of a domino show that R
x
◦ R
y
6=
R
y
◦ R
x
:
R
x
R
y
x
y
z
R
y
R
x
x
y
z

Linear representations of groups 491
18.2
Linear representations of gr oups
A group may be seen as an a bstract set of “objects,” together with a table
giving the result of the product for every pair of elements (a “multiplication
table”). From this point of view, two groups (G, ·) and (G
′
, ⋆) may well have
the same abstract multiplication table: this means there exists a bijective map
ϕ : G → G
′
which preserves the product laws, that is, such that for any g
1
, g
2
in G, the image by ϕ of the product g
1
·g
2
∈ G is the product of the respective
images of each a rgument:
ϕ(g
1
· g
2
) = ϕ(g
1
) ⋆ ϕ(g
2
).
In such a case, the groups are called isomorphic.
DEFINITION 18.8 A map that preserves in this manner the group structure
is called an homomorphism or a group morphism; if it is bijective, it is a
group isomorphism.
Example 18.9 The set M o f matrices
M
x
=
1 x
0 1
,
with the product given by the product of matrices, is a group. Since M
x
· M
y
= M
x+ y
for any
x, y ∈ R, it follows that the (obviously bijective) map ϕ : x 7→ M
x
is a group isomorphism
between (R, +) and (M , ·).
Alternately, one speaks of a representation of the group G by G
′
if there
exists a homomorphism ϕ : G → G
′
(not necessarily bijective).
Example 18.10 Let U be the set of complex numbers z such t hat |z|= 1. The map ϕ : R → U
defined by ϕ(θ) = e
iθ
is a group morphism between (R, +) and ( U, ·), but it is not an
isomorphism. Its kernel, defined as the set of elements with image equal to the identity
element in U, is g iven by
Ker ϕ = {θ ∈ R ; ϕ(θ) = 1} = 2πZ.
The map ϕ : R → U is a (nonbijective) continuous representation
1
of the additive group R.
(Note th at the groups R and U have very different topological propertie s; for instance, R is
simply connected, whereas U is not.)
On the other hand, if we denote by G the group of rotations of R
2
centered at the
origin 0, th e map ψ : G → U which associates e
iθ
to a rotation with angle θ is indeed a group
isomorphism. M o reover, it is conti nuous. It follows that G, like U , is not simply connected.
By far the most us eful representations are those which map a group (G, ·)
to the group of a utomorphisms of a vector space or, equivalently, to the group
GL
n
(K) of invertible square matrices of s ize n:
1
To speak of continuity, we must have a topology on each group, which h ere is simply the
usual topology of R and of U ⊂ C.

492 Groups and group representations
DEFINITION 18.11 Let K be either R or C. A linear representation of a
group G defined over K is a pair (V , ϕ), where V is a K-vector space a nd
ϕ is a homomorphism of G into Gℓ(V ), t he group of linear automorphisms
of V.
Such a representation is of finite degree if V is a finite-dimensional vector
space, and the degree of the representation is the dimension n of V . In this
case, Gℓ(V ) is isomorphic to GL
n
(K), and we have a matrix representation.
By abuse of notation, one sometimes refers to V only, or to ϕ only, as a
representation of the group G.
DEFINITION 18.12 Let (V , ϕ) be a linear representation of a G. This repre-
sentation is faithful if ϕ is injective, tha t is, if distinct elements of the group
have distinct images (this means no information is lost by going th rough t he
map ϕ).
On the other hand, the representation is trivial if ϕ(g) = Id
V
for any
g ∈ G, i.e., if we have ϕ(g)(v) = v for all g ∈ G and all v ∈ V (which means
all information in G is lost after applying ϕ).
Example 18.13 Consider Example 18.9 again. The map ϕ : R → GL
2
(R) which associates the
matrice M
x
to a real number x is a faithful matrix representation of R.
18.3
Vectors and the group S O(3)
In this section, physical space is identified with the vector space E = R
3
.
DEFINITION 18.14 The special orthogonal group or group of rotations of
euclidean space E = R
3
, denoted S O(E), is the group of linear maps R :
R
3
→ R
3
such that
• the scalar product is invariant under R:
∀a, b ∈ R
3
( a|b) =
R( a)
R( b)
;
• R preserves orientation in space: the image of any b asis which is posi-
tively oriented is also positively oriented.
The rotation group SO(E) will be identified without further comment with
the group S O(3) of matrices representing rotations in a fixed orthonormal
basis.
Denoting by R the matrix representing a rotation R in the (orthonormal)
canonical basis of E, we have
( a|b) = (R a|R b) = ( a|
t
RR b) for all a, b ∈ E

Vectors and the g roup SO(3) 493
(using the invariant of the scalar product under R), which shows that R is an
invertible matrix and that
t
R = R
−1
. (18.1)
A matrix for w hich (18.1) holds is called an orth ogonal matrix.
Thus linear maps preserving the scalar product correspond to orthogonal
matrices, and they form a group, called the orthogonal group, d enoted O(E).
The group of orthogonal matrices is itself denoted O(3). Note that the matrix
−I
3
, although it is orthogonal, is not a rota tion matrix; indeed, it reverses
orientation, and its determinant is equal to −1.
The group O(3) is therefore larger than SO(3). More precisely, we have:
THEOREM 18.15 The group O(3) is not connected; it is the union of two connected
subsets, namely, SO(3) and {−R ; R ∈ SO(3)}, on which the determinant is equal,
respectively, to 1 and −1.
Since the identity matrix lies in SO(3), it is natural to state that SO(3) is
the connected component of the identity in O(3).
To summariz e, th e notation SO(3) means
§
“S” for special (i.e., with determinant 1),
“O” for orthogonal (such that
t
R = R
−1
).
Consider then a rotation R
θθ
θθ
θθ
, cha racterized by a vector θθ
θ
θ
θθ ∈ R
3
with norm
θ ∈ [0, 2π[ (the angle of the rotation), directed along a unit vector n (the axis
of the rotation): θθ
θ
θ
θθ = θ n.
Denote by (e
1
, e
2
, e
3
) the basis vectors in space and by (e
′
1
, e
′
2
, e
′
3
) their
images by a rotation R
θθ
θ
θ
θθ
. With matrix notation (it is easy to come back to
tensor notation) we denote by R(θθ
θ
θ
θθ) the matrix defined by the relations
2
e
′
i
=
3
X
j=1
R(θθ
θ
θ
θθ)
i j
e
j
.
2
Note : the matrix R(θθ
θ
θ
θθ) is not the matrix for the change of basis L
µ
ν
defined Equation (16.1)
on page 434, but its transpose. Here, we have, symbolically,
e
′
1
e
′
2
e
′
3
= R(θθ
θ
θ
θθ)
e
1
e
2
e
3
,
which means that one can read the coordinates of the new vectors in th e old basis in the rows
of the matrix (rather than in the columns). The matri x linking the coordinates of a (fixed)
point in both bases is R(θθ
θ
θ
θθ)
−1
=
t
R(θθ
θ
θ
θθ) :
x
′
y
′
z
′
=
t
R(θθ
θ
θ
θθ)
x
y
z
.

494 Groups and group representations
A rotation R(θ e
z
) with angle θ around the axis O z is represented by th e
matrix
R
z
(θ)
def
= R(θ e
z
) =
cos θ sin θ 0
−sin θ cos θ 0
0 0 1
Similarly, the matrices of rotations around the axis O x and O y are defined
by
R
x
(ζ)
def
= R(ζ e
x
) =
1 0 0
0 cos ζ sin ζ
0 −sin ζ cos ζ
and (b e careful with the sign in this last formula!)
R
y
(η)
def
= R(η e
y
) =
cos η 0 −sin η
0 1 0
sin η 0 cos η
.
Remark 18.16 When speaking of space rotations, the re are two different points of view, for
a physicist. The first point of view (called active) is one where the axes of the frame (the
observer) are immobile, whereas the physical system is rotated. In the sec ond point of view,
called passive, the same system is observed by two different observers, the axes of whose
respective frames differ from each other by a rotation. In all the rest of the text, we only consider
passive transformations.
For a rotation R(θθ
θ
θ
θθ) parameterized by θθ
θ
θ
θθ = θ n, we can express the vector θθ
θ
θ
θθ
in terms of the canonical basis:
θθ
θ
θ
θθ = ζ e
1
+ η e
2
+ θ e
3
.
How does one deduce the representation for the rotation R(θθ
θ
θ
θθ)? It is tempting
to try the product R
x
(ζ) · R
y
(η) · R
z
(θ); however, performing th e product in
this order seems an a rbitrary decision, and the example of the d omino on
page 490 should convince the reader that this is unlikely to be the correct
solution. Indeed, in neither the first nor the second line is the final state of
the domino the same as its state after a rotation of a ngle π/
p
2 around the
first diagonal in the O x y-plane.
A proper solution is in fact quite involved. It is first required to use
infinitesimal transformations, that is, to consider rotations with a “very small”
angle δθ. Then it is necessary to explain how non-infinitesimal rotations may
be reconstructed from infinitesimal transformations, by means of a process
called “exponentiation” (which is of course related to the usual exponential
function on R).
Consider then a rotation with axis O z and “infinitesimal” a ngle δθ: it is
given by
R(δθ e
z
) =
1 δθ 0
−δθ 1 0
0 0 1
= I
3
+ δθ J
z
Vectors and the g roup SO(3) 495
where we put
J
z
def
=
dR(θ e
z
)
dθ
θ=0
=
0 1 0
−1 0 0
0 0 0
,
Similarly, define
J
x
def
=
dR(ζ e
x
)
dζ
ζ=0
=
0 0 0
0 0 1
0 −1 0
and
J
y
def
=
dR(η e
y
)
dη
η=0
=
0 0 −1
0 0 0
1 0 0
.
DEFINITION 18.17 Denote J
1
= J
x
, J
2
= J
y
, and J
3
= J
z
. The matrices J
i
thus defined are the infinitesimal generators of rotations. We denote by J
the vector J = ( J
1
, J
2
, J
3
).
How does one now pass from infinitesimal t ransformations to “finite”
transformations?
3
A fi rst method is to remark that the set of matrices of the
form R(θ e
z
) is a representation of the addit ive group (R, +), wha t is called a
one-parameter group,
4
since we have R
(θ + θ
′
) e
z
= R(θ e
z
) ·R(θ
′
e
z
). An
explicit computation shows that
dR(θ e
z
)
dθ
θ=θ
0
=
−sin θ
0
cos θ
0
0
−cos θ
0
−sin θ
0
0
0 0 1
= J
z
·R(θ
0
e
z
),
and hence the matrix-valued function R(θ e
z
) is a solution of the ordinary
differential equation with constant coefficients
M
′
= J
z
· M
for w hich the solutions are given by
R(θ e
z
) = R(0)·exp(θ J
z
) = exp(θ J
z
) = I
2
+θ J
z
+
θ
2
2!
J
2
z
+···+
θ
n
n!
J
n
z
+··· .
(This series is absolutely convergent, and therefore convergent.) This is a
general fact, and the following theorem holds:
THEOREM 18.18 Let
R(θ)
θ∈R
be a one-parameter group of matrices. Then its
infinitesimal generator given by J = R
′
(0) satisfies R(θ) = e
θ J
for any θ ∈ R.
3
“Finite” in the usual physicist’s sense, meaning “not infinitesimal.”
4
I.e., a group with elements of the type g
x
, x running over the group of real numbers R,
such that g
y
· g
x
= g
y+x
and g
−x
= g
−1
x
for any x, y ∈ R.

496 Groups and group representations
Proof. Indeed, we have R(0) = I and
dR(θ)
dθ
= lim
h→0
R(θ + h) − R(θ)
h
= lim
h→0
R(h) −Id
h
R(θ) = J R(θ),
which shows that R(θ) is the solution of the differential equation with constant co ef-
ficient R
′
= J R such that R(0) = I, that is, R(θ) = e
θ J
.
THEOREM 18.19 Let R
θθ
θ
θ
θθ
be a rotation characterized by the vector θθ
θ
θ
θθ = θ n (angle θ,
axis directed by the vector n). Then, denoting as before J = ( J
1
, J
2
, J
3
), the matrix
representing R(θθ
θ
θ
θθ) is given by
R(θθ
θ
θ
θθ) = exp(θθ
θ
θ
θθ · J) = exp(θ
1
J
1
+ θ
2
J
2
+ θ
3
J
3
).
It is important here to be very careful that the matrices J
i
do not commute
with each other, so that this expression is not a rotation with angle θ
1
around
the x-axis, followed by a rotation with angle θ
2
around the y-a xis, and a
rotation with angle θ
3
around the z-axis:
exp(θ
1
J
1
+ θ
2
J
2
+ θ
3
J
3
) 6≡ exp(θ
1
J
1
) exp(θ
2
J
2
) exp(θ
3
J
3
).
However, using the exponentials, the matrices J
i
can provide any rotation
matrix. Even better: it turns out that, in practice, it is only necessary to know
the commutation relations between the matrices J
i
. The reader will easily check
that they are given by
[ J
1
, J
2
] = −J
3
, [ J
2
, J
3
] = −J
1
, and [ J
3
, J
1
] = −J
2
(recall th at [A, B] = AB − B A for any two square matrices A and B), which
can be summarized neatly by the single formula
[ J
i
, J
j
] = −ǫ
i jk
J
k
, (18.2)
where summation over the repeated index (i.e., over k) is implicit, and where
the tensor ǫ is the totally anti-symmetric Levi-Civita tensor. The commutation
relations (18.2) define wha t is called the Lie algebra of S O(3). The coefficients
−ǫ
i jk
are the structure constants of the Lie algebra of SO(3).
Remark 18.20 The minus sign in the formula is not important; if we had been dealing with
active transformations instead of p assive ones, the matrice s J
k
would have carried a minus sign,
and the commutation relations also.
Knowing the Lie algebra of the group (i.e., knowing the structure constants)
is enough to recover the local structure of the group. (However, we will see
that there exist groups wh ich are “globally” different but have the same Lie
algebra, for instance, SO(3) and SU(2), or more simply SO(3) and O(3); but
this is not a coincidence, s ince SU(2) is a covering of SO(3).)
Remark 18.21 Since SO(3) i s a group, performing a rotation with parameter θθ
θ
θ
θθ followed by a
rotation wit h parameter θθ
θ
θ
θθ
′
is another rotation, with parameter θθ
θ
θ
θθ
′′
. However, there is no simple
relation between θθ
θ
θ
θθ, θθ
θ
θ
θθ
′
and θθ
θ
θ
θθ
′′
.