Алешин Г.В., Богданов Ю.А. Эффективность сложных радио-технических систем
Подождите немного. Документ загружается.

61
Φ( )α
π
=
∫
−
−∞
∞
1
2
2
2
e dt
t
.
Зависимость
inf ( )
t
t
n
ni
α
представлена далее.
Согласно формуле (2.5.35), полученной из (2.5.32), имеем
inf ( ) max ,
t
t M
n
ni
α
βα βα
= − −
−
1
1 2
2
2
2
Φ Φ
,
или согласно формуле (2.5.31) имеем
inf ( ) max ,
t
t M
erf erf
n
ni
α
βα βα
=
−
1
2 2
1
2 2
,
где
erf
x
dx
α
π
α
α
2
1
2
2
2
= −
∫
−
exp
.
При
M > 10
βα
2 2
4>
. Поэтому, разлагая в ряд функцию
( )
erf
x
x
x
2
1
2
2
2
≅ −
−
π
exp
,
получим трансцендентное уравнение для определения
x
0
или
α
0
:
e
x M
x
−
=
+
0
2
2
0
2
1
1
π
.
Для точного решения можно использовать итерационную формулу, полученную методом
Ньютона-Лагранжа:
x
x
x
C
x
i
i
i
i
=
+
+
−
−
−
1
2
1
2
1 1
1
2
exp
, (2.5.36)
где
C
M
1
2
1
1
=
+
π
.
Хотя формула (2.5.36) получена для
x
i
≥ 4
, допустимые
x
i
могут быть
≥ 2
.
Условие сходимости по Ньютону выполняется удовлетворительно, погрешность для
x ≥ 2
не превышает 20 %. При
x < 2
решение некорректно.
Как и во всех градиентных методах, точность определения зависит от точности вычислений
на последних шагах. О сходимости вычислений можно судить по следующему примеру.
Пример 1.
M =10
2
, примем,
x
( )0
1=
В этом случае получим процесс
x
i( )
=1; 2; 2,53; 2,6; 2,63
при
i = 0; 1; 2; 3;
4; 5
.
Таким образом, для
M =10
2
x
0
2 63≅ ,
при точности расчета до 3-х значащих цифр.
Пример 2.
M =10
3
,
x
( )0
1=
.
x
i( )
=1; 2; 2,49; 2,85; 3,12; 3,25; 3,33; 3,28
i = 0; 1; 2; 3; 4; 5; 6; 7
.
Таким образом, при
M =10
3
x
0
331≅ ,
.
Пример 3.
M =10
,
x
( )0
1=
.
x
i( )
=1; 1,67; 1,7; 1,68
i = 0; 1; 2; 3
.
Таким образом, при
M =10
x
0
168≅ ,
.
62
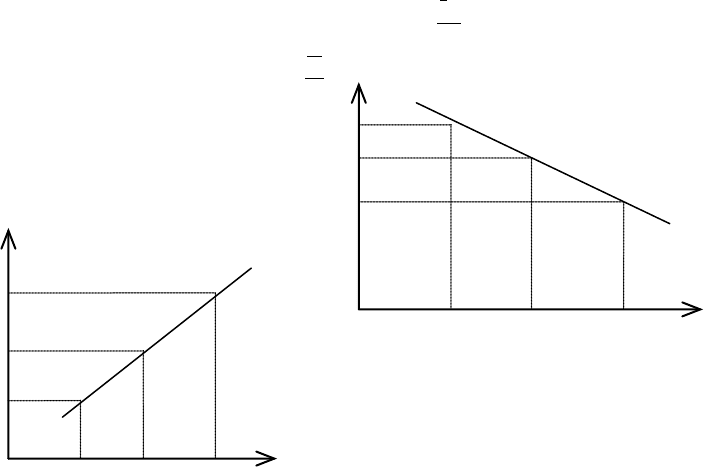
Для оптимальных значений
x
0
=1,68; 2,63; 3,3
inf ,
t
t
n
ni
= 0125; 0,0091; 0,00127
(рис. 2.5.7,
2.5.8).
Оценивая результаты (2.5.31), (2.5.34)—(2.5.36), можно сделать следующие выводы:
— комбинированные методы поиска с целью обнаружения сигнала могут быть весьма
эффективными и могут приближаться по критерию среднего времени поиска к параллельным
многоканальным методам обзора. Однако, это относится лишь к среднему времени поиска,
максимальное время поиска с заданным коэффициентом доверия остается тем же;
— последовательный поиск с изменяющейся ДН по времени поиска равноценен
последовательному поиску с неизменной ДН при заданном качестве обнаружения;
— параллельный многоканальный обзор с неодинаковыми ДН равноценен обзору
одинаковыми ДН, ширина которых равна среднему арифметическому значению;
— комбинированный метод обзора эффективен лишь в среднем, он хорош по
экономическому критерию по сравнению с многоканальным методом лишь в случаях частого
применения поисковых схем и для случаев малой ответственности за невыполнение требований
к наименьшему времени поиска.
Результаты системного анализа особенностей поискового метода по углам справедливы
также для поиска по частоте и задержке.
При поиске по частоте это связано с тем, что мощность собственных шумов на выходе
приемника пропорциональна его полосе пропускания. Т. е. качество обнаружения должно быть
неизменно, поэтому время поиска не зависит от полосы пропускания системы, т. к. чем уже
полоса, тем больше постоянная времени элемента разрешения по частоте, равного полосе
пропускания.
Аналогично при поиске сложного сигнала по задержке, чем меньше длительность элемента
сигнала, тем больше элементов разрешения по задержке требуется просмотреть.
100
10
M
X
0
(M)
Рис 2.5.7
1000
100
M
10
inf ( )
t
t
M
n
n
Рис 2.5.8
10
-2
10
-3
10
-1

63
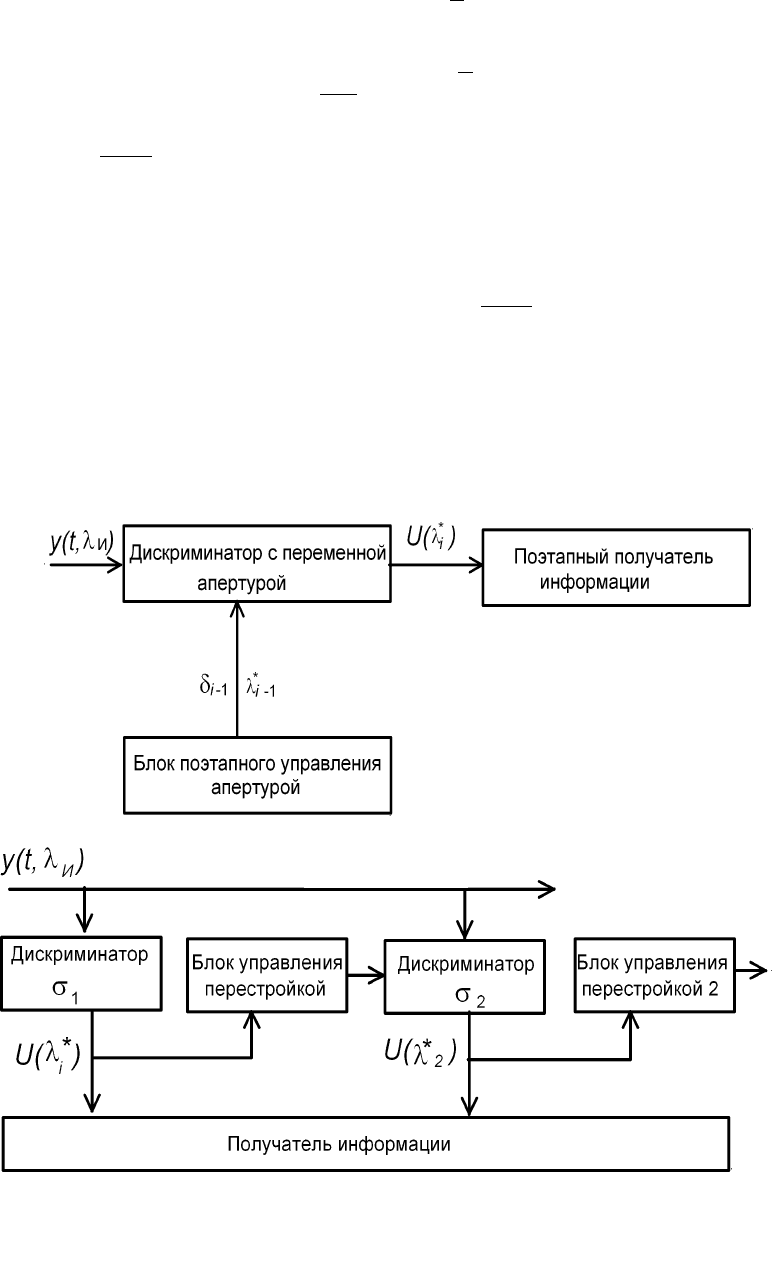
2.6. Оптимизация многоканального измерителя параметров сигнала
Многоканальным называется такой измеритель параметра сигнала (рис. 2.6.1), апертуры
каналов которого одновременно перекрывают весь априорный диапазон измеряемого параметра
(рис. 2.6.2) при заданных уровнях сигнала и порогов. Во многоканальном измерителе
совмещены процесс обнаружения сигнала и измерения его параметра
λ
. Измерение параметра
λ
производится по параметру настройки i-го канала, где обнаружен сигнал. Естественно, что
точность таких измерений определяется полосой i-го канала.
Рис. 2.6.1
i+1
0
i
i-2
U
U
пор
max
1
( )
U
вых
λ
λ
2β σ
а а
λ
н
i-1
Рис.2..6..2
U
U
пор
max
2
1
2
=

64
Достоинством многоканального измерителя является высокая оперативность
(быстродействие) по сравнению с поисковым методом измерений при большой априорной
неопределенности и при высокой чувствительности обнаружения сигнала.
Недостаток — больше сложность, масса, стоимость, а также неоднозначность измерений
при больших уровнях сигнала. Первоначально порог обнаружения (
U
пор1
рис. 2.6.2) в каналах
устанавливают такой, какой обеспечивает допустимый уровень вероятности ложных тревог,
определяемый шумом. Поэтому при большом уровне сигнала малый порог (
U
пор1
) превышается
в нескольких каналах сразу. Отсюда происходит неоднозначность измерений. С целью
устранения неоднозначности измерений или уровень сигнала на входе многоканального
измерителя уменьшают аттенюатором, или уровень порогов обнаружения во всех каналах
увеличивают до тех пор (до уровня
U
U
пор
max
2
2
=
), пока не устранится неоднозначность
измерений. Если
U
U
пор
max
2
2
>
, появляются «мертвые» зоны, где сигнал может быть, а
обнаружения не будет. Процесс устранения неоднозначности несколько усложняет систему, зато
при его автоматизации уменьшает оперативность незначительно.
Действительно, время обнаружения сигнала определяется полосой пропускания частот П
системы
t
П
обн
≅
1
и временем перестройки порогов, которое можно, но бесполезно делать меньшим времени
затухания сигнала в контурах. Поэтому оперативность
t
мк
многоканального измерителя, т. е.
время измерения, определяется полосой пропускания П системы
t t
П
мк обн
≅ =2
2
.
Изложенное справедливо для любого измеряемого параметра
λ
сигнала. Если параметр —
частота узкополосного сигнала с шириной спектра, меньшей полосы пропускания, то
многоканальный измеритель представляет собой систему расстроенных резонансных фильтров.
Если параметр — угловые координаты практически точечной цели, то многоканальный
измеритель в простом случае осуществляется, например, расстановкой облучателей в фокальной
плоскости зеркала в двух ортогональных плоскостях или ФАР с питанием элементов по
Баттлеру. Если параметр — задержка сигнала, то многоканальная система может представлять
собой набор корреляторов для сложного сигнала и т. п. Разумеется многоканальный метод
оценивания может быть реализован в настоящее время не для всех параметров сигнала. Это,
например, длительность фронта, ширина спектра и т. п.
Рассмотрим задачу оптимизации многоканальной системы поиска сигнала по стоимости
системы и времени поиска при заданных качественных показателях обнаружения сигнала и
заданной его сложности.
При формализации задачи будем предполагать, что сигнал — сложный, например, типа
широкополосного шумоподобного по пространству и по времени, и что поиск сигнала
производится по всем возможным параметрам настройки: по времени запаздывания, по частоте,
по пространственным углам и т. д. Это предположение является достаточно общим, поскольку
частные случаи, когда по какому-либо параметру поиск не производится, нетрудно получить
подстановкой соответствующих фиксированных параметров сигнала и системы поиска.
Обозначим диапазон поиска i-го параметра сигнала символом
βD
i
1 2
, а число разрешаемых
элементов
n
i
. Естественно, что полоса
∆i
разрешения при этом равна
∆i
D
n
i
i
=
β
1 2
. (2.6.1)
Сигнал может быть обнаружен лишь в том случае, если настройка системы
{ }
∆ ∆ ∆
1
, , , ,
i m
полностью совпадает с параметрами согласованного сигнала
{ }
∆ ∆ ∆S S S
i m1
, , , ,
. Не конкретизируя структуру системы поиска, поскольку была показана
примерная равноценность параллельного и последовательного поиска, установим, что для

65
равновероятного поиска максимальное число N возможных комбинаций настроек
∆
равно
произведению числа разрешаемых элементов
n
i
по всем искомым параметрам
N n
i
i
m
=
∏
=1
, (2.6.2)
где m — число искомых параметров.
Тогда максимальное время поиска сигнала по всем настройкам
∆
в предположении, что
время переключения мало по сравнению с временем обработки (приема) сигнала
∆t
п мр
определится
t N t
п мn max
= ∆
р
. (2.6.3)
Причем, величина
∆t
п мр
, как и мощность и другие параметры сигнала, выбрана из условий
удовлетворения качественных показателей обнаружения, помехозащиты, скрытности и т. п. С
учетом (2.6.1), (2.6.2) выражение для максимального времени поиска примет вид
t t D i t n
п м
i
i
m
i
m
п м i
i
m
n max
=
∏ ∏
=
∏
= = =
∆ ∆ ∆
р р
β
1 2
1 1 1
. (2.6.3)
Сложность сигнала, определяемая заданным числом N возможных комбинаций настроек
∆
,
существенно, если не функционально, связана с показателями помехозащиты, скрытности и т. п.
Поэтому критерий N, а, следовательно, и
t
n max
, можно считать ограничением на варьируемые
параметры (или
∆
).
n
t
t
N
i
i
m
п м
доп
=
∏
= =
1
n max доп
∆
р
. (2.6.4)
Выполнение равенства (2.6.4) будет означать при этом строгое соответствие допустимого
времени поиска (2.6.3) и допустимого числа
N
доп
возможных настроек. Следовательно, в
данной задаче не решается вопрос о разрешении технического противоречия между допустимым
временем поиска и заданной сложностью сигнала.
В данной задаче критерием для выбора оптимального вектора
n
может служить стоимость
системы поиска. Стоимость
n
i
идентичных каналов i-го параметра можно представить в виде
C C n C
i i i i
= +
0
∆
,
где
∆C
i
— стоимость одного канала по i-му параметру поиска,
C
i0
— стоимость аппаратуры, независимой от числа каналов.
Например, если i-й параметр — частота, то
∆C
i
— стоимость узкополосных УПЧ,
формирующих частотные каналы, а
C
i0
— стоимость широкополосных усилителей (УВЧ, УПЧ
и пр.), если параметр — время задержки ШШС, то
∆C
i
— стоимость генератора опорного
сигнала (ШШС) с заданной задержкой, а
C
i0
— стоимость логики сдвига (линий задержки и т.
п.) на время корреляции, а
C
i0
— стоимость генератора опорного сигнала, если параметр —
угол, то
∆C
i
— стоимость облучателя с фидерным устройством, а
C
i0
— стоимость общего
зеркала, линзы и т. д.
Суммарная стоимость определится
C C C n C
i
i
m
i i
i
m
=
∑
= +
∑
= =1
0
1
∆
, (2.6.5)
где
C
0
— стоимость системы поиска, независящей от числа каналов
n
. При этом, вообще
говоря,
C
0
не обязательно равна
C
i
i
m
0
1=
∑
, так как возможны общие части системы поиска по
параметрам сигнала, которые не зависят от числа i каналов, но участвуют в поиске нескольких
параметров. Например, в системах поиска такой общей частью может быть высокочастотный
тракт общего усиления и предварительной фильтрации. Таким образом, задачу (2.6.5), (2.6.4)
можно считать сформулированной в виде
( )
min
min min
{ } { }
∆ ∆C C C n C
n n
i i
i
m
= − =
∑
=
0
1
, (2.6.6)
при ограничении
n N
i
i
m
доп
=
∏
=
1
.
66
Это простая задача сепарабельного программирования. Ее нетрудно решить методом
вырожденного динамического программирования либо методом покоординатного спуска.
Условный экстремум можно определить также методом множителей Лагранжа. Решение задачи
имеет вид
∆ ∆C m
N C
i
i
m
m
opt
=
∏
=
0
1
1
, (2.6.7)
n
C
N C
i opt
i
i
i
m
m
=
∏
=
1
0
1
1
∆
∆
, (2.6.8)
или
n
С
m C
i opt
opt
i
=
∆
∆
.
Решение легко объясняется физически, исходя из формулы (2.6.7). Действительно, чем
больше стоимость канала
∆C
i
, тем меньше необходимо брать таких каналов при сохранении той
же сложности сигнала
N
∂
, т. е. величины
n
i opt
и
∆C
i
обратно пропорциональны, поскольку
n C n C
C
m
i opt i i i
opt
∆ ∆
∆
= =
− −( )1 1 opt
.
2.7. Оптимизация многоэтапных измерений
Под многоэтапным будем понимать такой измеритель (рис. 2.7.1, 2.7.2), последующая шкала
(этап) которого настраивается на математическое ожидание оценки предыдущей шкалы и
апертура последующей шкалы сопряжена с доверительным интервалом оценки предыдущей
шкалы.
Рис. 2.7.2.
Рис. 2.7.1

67
Фактически это – измеритель, адаптирующийся к последовательной точечной оценке и к
точности измерений. Аналогичная идея описана в теории нелинейной фильтрации [39] на основе
марковских процессов. Здесь более просто получены результаты, ориентированные на
применение.
Если в формуле для взвешенной оценки (2.4.12) и дисперсии (2.4.13) предположить, что
σ
1
2
и
λ
1
— соответственно дисперсия и оценка на первом этапе, а
σ
a
2
и
λ
a
— на нулевом этапе
(априорные значения), то аналогично справедлива формула для последнего, n-го этапа
σ σ
β
n n
n
n
q
−
−
−
−
−
= +
2
1
2
1
2
1
2
. (2.7.1)
Применяя последовательно к каждому
σ
i
−2
формулу (2.7.1), получим
σ σ
β
n a
k
k
k
n
q
− −
−
−
=
= +
∏
2 2
1
2
1
1
2
. (2.7.2)
Заметим, что (2.7.2) может быть представлена также в исходном виде
σ σ
n k
k
n
− −
=
=
∑
2 2
0
, где
σ σ
0
=
a
. (2.7.3)
Правда, в этом выражении (2.7.3) не представлены условия сопряжения шкал (подраздел
2.4.2) и связи между параметрами шкал [22].
В выражении (2.7.2) представлены показатели точности
σ
n
−2
измерителя и априорной
неопределенности
σ
a
−2
. Их иногда называют внешними параметрами оптимизации.
Техническими параметрами, или внутренними параметрами являются коэффициенты доверия
шкал и отношение сигнал / шум
q
k
на выходе каждой k-й шкалы. Отношение сигнал / шум
q
k
каждой шкалы также зависит от технических параметров.
Поскольку шкалы многоэтапного измерителя работают последовательно во времени, то
существует ограничение на энергетику шкал
T T
k
k
n
=
∑
≤
1
, (2.7.4)
где
T
k
— время оценивания параметра в k-й шкале.
Поскольку мощность сигнала
P
c
и спектральная плотность шумов
N
0
на выходе шкал
одинаковы, сумму можно представить в виде
q q
k
k
n
=
∑
≤
1
, (2.7.5)
где
q
PT
N
k
k
=
0
.
В свою очередь, каждое значение
q
i
можно представить в факторизованном виде (см.
подраздел 3.1)
q X
k ik
i
n
k
=
∏
=1
,
где
X
ik
— монотонные функции от технических параметров k-й шкалы.
Задача оптимизации многоэтапного измерителя с учетом ограничений (2.7.5) и по стоимости
предстанет в виде
{ } { } { }
max max max
X X
n
a
X
k
k
k
n
A q= = +
∏
−
−
−
=
σ
σ
β
2
2
2
1
1
2
(2.7.6)
q q
k
k
n
=
∑
≤
1
, (2.7.7)
( )
[ ]
C q C C
k k k
k
n
+
∑
≤
=
∑0
1
, (2.7.8)
( )
p p
k
k
n
дов k дов доп
−
=
−
∏
≤
1
1
1
β
, (2.7.9)
X X X
i i i
kk min k max
≤ ≤
, (2.7.10)

68
где
p
дов k
— доверительная вероятность k-й шкалы,
( )
( )
C q C X
k k k
=
и
C
k0
—
соответственно стоимости частей k-й шкалы, зависящей от значения
q
k
и независящей от него.
Все ограничения (2.7.7—2.7.10) должны быть непротиворечивыми, т. е. должно
существовать множество допустимых решений, на котором требуется определить оптимум.
Ввиду монотонности
( )
A q
,
( )
C X
и
( )
q X
решение задачи оптимизации многоэтапного
измерителя может быть упрощено, т. к. оптимум может отыскиваться при строгих равенствах.
Для высококачественных систем, для которых
β
k
k
q
−
>>
2
2
1
, выражение (2.7.6) для A
упрощается
A q
k
k
k
n
≈
∏
−
=
β
2
1
2
. (2.7.11)
Задача (2.7.6), (2.7.8) решается методом, изложенным в подразделе 3.1: линеаризацией
ограничений (2.7.8), использованием стандартного решения подраздела 3.1 как итерационной
формулы и использованием ограничений на технические параметры для коррекции решения.
При одинаковом по форме распределении параметра
λ
k
максимум A на множестве
β
достигается, если
β β
i
=
.
Отсюда следует, что максимум A на множестве
q
для задачи (2.7.6), (2.7.7) определяется
при
q
q
n
i
=
.
Тогда
{ }
max
q
n
n
A
q
n
q
n
12
2
2
=
=
−
β
ξ
, (2.7.12)
при
q
q
n
i опт
12
=
, (2.7.13)
где
ξ
β
=
−2
2
.
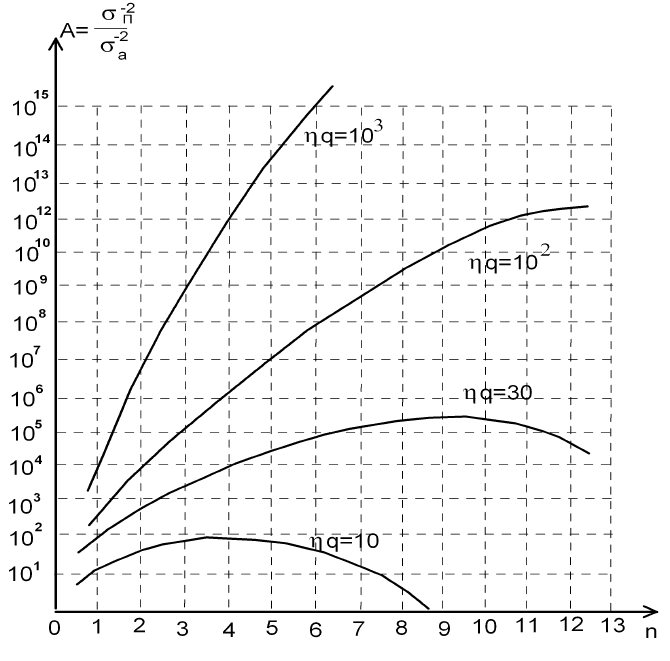
Графики зависимостей (2.7.12) представлены на рис. 2.7.3. Характер зависимостей, т. е.
убывание выигрыша A в точности при большом числе шкал n, объясняется тем, что энергетика
каждой шкалы резко падает и это приводит к усиленному пороговому эффекту.
Требуемое число этапов, или шкал определяется из уравнения
n
A
q n
=
−
ln
ln ln
12
ξ
, (2.7.14)
или приближенно
n
A
q
=
ln
lnξ
для
n n>> ln
.
И хотя очевидно, что существует оптимум для A, особенно при малых
ξq
, этим оптимумом
воспользоваться не всегда рационально, поскольку число шкал в реальных системах не
превышает 7—8.
При
ξq n>>
оптимальное число шкал равно
n
q
e
opt
=
−
ξ
1
.
При этом
A e
q
e
max
=
−
ξ
1
.
Это означает, что для практически интересных случаев, когда
ξq e>>
, несмотря на
возможность достижения самых больших выигрышей в точности
A
max
, добиться реализации
системы с большим числом шкал
n
opt
проблематично.
69
Рис. 2.7.3.
Приведенные примеры оптимизации являются достаточно общими, потому что
дискриминаторные измерители являются частным случаем многоэтапных измерителей (при
n = 1
). Каждый из этапов может содержать измеритель, использующий любой метод
оценивания. Реальные измерительные системы, как правило, многоэтапные, поскольку
требуемый выигрыш A в точности измерений может достигать шести порядков и более.
Многоэтапный измеритель может быть реализован в виде комплекса, когда роль каждой
шкалы (этапа) играет самостоятельная система, или в виде совмещенной системы с n -
шкальным измерителем. Совмещенная система гораздо экономичней. Поэтому первый вариант
может быть оправдан лишь в том случае, когда системы комплекса имеют самостоятельное
значение и решают, кроме того, свои задачи, либо когда они построены на различных
физических принципах и имеют свои условия работы, либо когда совмещенной системы еще
нет, а комплекс уже существует.
В случае совмещенной системы ограничение (2.7.8) должно быть представлено в виде
C q nC C C
k
( )+ + ≤
∑0
, (2.7.15)
где C(q) и
C
0
— стоимости частей системы, зависящей и независящей от отношения сигнал
/ шум q,
C
k
— стоимость одной шкалы.
Решение задач (2.7.6), (2.7.8) и (2.7.6), (2.7.15) приведено в следующем подразделе.
Задача (2.7.6), (2.7.8) и (2.7.7) нуждается в анализе множества допустимых решений.
2.8. Оптимизация многошкальных систем оценивания параметров сигнала
Многошкальными называются такие многоэтапные измерители, которые для формирования
дискриминаторных характеристик шкал используют сигналы, с периодической зависимостью от
измеряемого параметра. Другими словами, дискриминаторная характеристика каждой шкалы
представляет собой периодическую, чаще гармоническую, функцию (рис. 2.8.1).
Поскольку дискриминаторная, периодическая характеристика перекрывает весь диапазон
параметра (рис. 2.8.1), измерения возможны одновременно на всех шкалах. Поэтому
многошкальные измерители могут быть с последовательными шкалами во времени (рис.2.7.1.) и
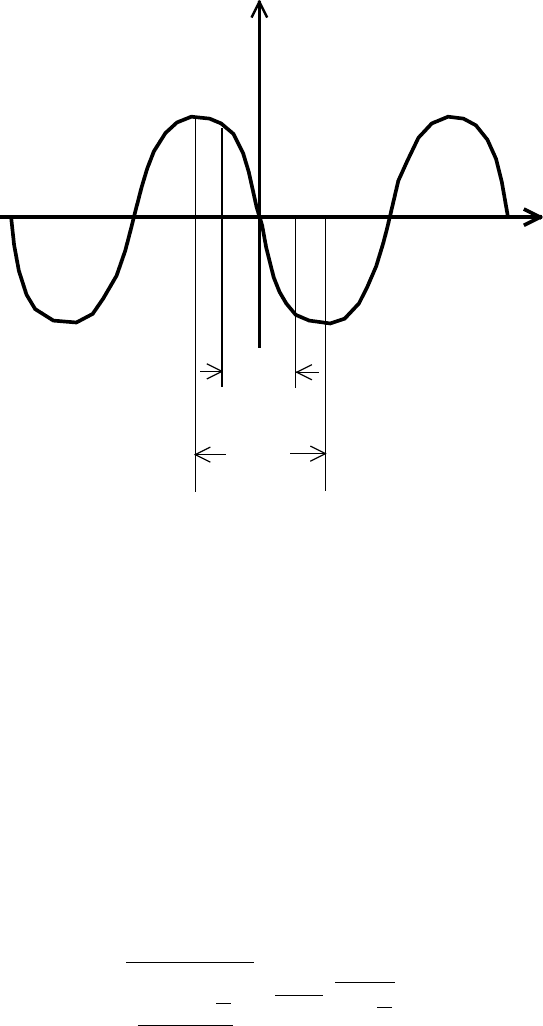
70
с параллельными, т. е. одновременными (рис. 2.7.2). Структура измерителей такая же, как и у
многоэтапных измерителей.
Последовательные, как и многоэтапные, измерители могут иметь аппаратурную реализацию
как всех шкал, так и одной шкалы с переменным (переключающимся) периодом. Существенное
преимущество многошкальных измерителей перед многоэтапными в том, что нет
необходимости настраивать каждую последующую шкалу на значение оценки предыдущей, т. к.
шкалы всегда настроены и перекрывают весь диапазон. Это существенно повышает точность
измерений согласно подраздела 2.4.3, т. к. точность настройки шкал в этом случае всегда можно
сделать выше точности измерений параметра в самой точной шкале.
U ( )
λ
д
2∆λ
д
λ
2∆λ
д
χ
Рис.2.8.1
Для многошкальных измерителей чаще всего используют фазовые измерения задержки,
угловых координат при базовом методе пеленгации и реже несущей частоты и других
параметров сигнала.
Для формирования дискриминаторных характеристик шкал чаще всего используют
гармонические колебания по той причине, что отфильтровать их в шумах можно, используя
более узкие полосы пропускания, что обеспечивает высокие отношения сигнал / шум
q
i
.
Однако, гармонические дискриминаторные характеристики, в которых применяются
гармонические сигналы для формирования шкал, имеют тот недостаток по сравнению с
линейными дискриминаторными характеристиками шкал, что на границах апертуры
дискриминатора существенно снижается точность измерений. Приходится сужать апертуру
дискриминатора до приемлемой точности на границе. Это приводит к росту числа шкал и к
связанным с этим недостаткам.
Оценим влияние сужения линейного участка апертуры дискриминатора каждой шкалы за
счет применения гармонической характеристики. Если апертуру дискриминатора сузить до
значения
2χ∆λ
∂
, где
χ ≤1
, то крутизна характеристики дискриминатора увеличится на новых
границах апертуры (рис. 2.8.1) и точность измерений будет равна
σ
σ
χ
π
χ
χ
χ
π
λ
∂
∂
2
2
2
2
2
2
2
2
2
2
2
≅
=
ш
ш
S
q
sin
sin
∆λ
∆λ
. (2.8.1)
При