Алешин Г.В., Богданов Ю.А. Эффективность сложных радио-технических систем
Подождите немного. Документ загружается.

91
уменьшается при
′
≤
′
C C
oc opa
. Если же
′
>
′
C C
oc opa
, то экспоненциальный множитель при увели-
чении
α
растет. В этом случае может существовать оптимальное число
α
, или параметров со-
вмещенных блоков k. Оптимальный параметр
α
можно определить из уравнения
A x
p
x
p
m
p
x
p
p
m
ε ε ε
= =
∑
+
∑
=
1 1
0ln
, (4.2.2)
где
x
n
=
−
1
1( )α
,
A
C
C
oc
о н
=
′
′
ln
р
.
Разлагая функцию
ε
x
в ряд Тейлора в окрестности
ε
p
=1
для высококачественных систем и
оставляя лишь члены второго порядка малости, получим
x
A
B A
opt
m
=
+( )1
и
α
opt
B A
Amn
=
−
+
1
1( )
, (4.2.3)
где
B
p
p
m
=
∑
=
ln
1
1
ε
. Оптимум имеет место для
A
B
mn B
≥
−
.
Таким образом, для исследования вопросов оптимальности совмещенных систем большое
значение имеет метод анализа эффективности совмещения. Примененный в работе метод опре-
деления оптимальности совмещения имеет то преимущество, что он органически связан с пара-
метрическим синтезом системы и может дать практические рекомендации по более общим во-
просам оптимизации совмещенных систем.
В результате решения общей задачи оптимизации совмещенной системы можно сделать
следующие выводы:
— параметрический синтез совмещенной системы можно производить для типовых много-
критериальных систем с произвольным числом технических параметров и независимых каналов
измерения параметров движения и передачи информации;
— для каждой задачи параметрического синтеза, отличающейся хотя бы одним ограничени-
ем, или критерием, как численно, так и качественно, т. е. составом ограничений, существуют
свои оптимальные значения параметров, или оптимальное решение, которое обращает целевую
функцию (стоимость) в минимум;
— в случае, когда среднее геометрическое производных от стоимости по параметру для со-
вмещенных блоков меньше или равно среднему геометрическому таких же производных для не
совмещенных блоков, число совмещенных блоков целесообразно по возможности увеличить,
поскольку стоимость системы при этом монотонно падает. В противном случае может иметь
место определенный выше оптимум числа параметров совмещенных блоков;
— в случае, когда число оптимизируемых параметров во всех каналах одинаково, задача
имеет каноническое решение в аналитическом виде. В противном случае решение для парамет-
ров совмещения отыскивается численными методами по полученным итерационным формулам;
— полученные оптимальные решения позволяют производить инженерные расчеты техни-
ческих параметров системы и минимально необходимых ассигнований на систему. Решения
верны для достаточной близости линейных ограничений реальным линиям регрессии стоимости
на параметры;
— результаты решения можно использовать для произвольных ограничений, если использо-
вать применяемый в разделах 3, 4 метод последовательных приближений для функций регрес-
сии, удовлетворяющих условиям [22]. Решение задачи аналогично для оптимизации совмещен-
ных двухсторонних систем типа КИС, использующих простые и сложные сигналы, либо для
систем другого класса, если показатели качества систем формализуются таким же образом;
— задача вообще допускает поэтапное определение оптимальных параметров.
4.3. Возможности учета более полного состава технических требований к радиотехническим
системам
В разделах 3, 4 оптимизация систем производилась по критериям 1, 2, 3, 11 подраздела 3.
Покажем, что без существенных изменений методика оптимизации систем может быть расши-
рена на случай более полного состава тактико-технических требований, т. е. для случая, учиты-
92
вающего также показатели качества 5, 8, 12, 13. Методика учета показателей качества 4, 5 со-
вместно с 2, 11 описана в подразделе 4.3. Поэтому приведенная в работе оптимизация РТС охва-
тывает по существу основную часть показателей качества из состава ТТТ к системе.
Динамические ошибки оценки параметров сигнала могут быть учтены при системном анали-
зе, когда будет исследована зависимость дисперсии динамической ошибки от априорных сведе-
ний, от степени астатизма, от сложности и стоимости системы. В этом случае структура задачи
не изменится, однако при поиске оптимального соотношения между флуктуационными и дина-
мическими ошибками на полосу пропускания канала будет наложено еще одно ограничение.
Ошибки оценивания параметров за счет неточного знания времени привязки параметров к
шкале системы единого времени могут быть учтены с достаточной точностью и дополнены в
критериях точности в совмещенных командно-измерительных системах. Ошибки оценивания
ряда ранее независимых каналов могут при этом стать зависимыми. Для прецизионных систем
такую несущественную зависимость ошибки вторичной обработки сигналов несложно учесть,
особенно при независимых оценках, в виде монотонных функций от дисперсий точечных оценок
и объема выборки. Структура задачи при этом принципиально не изменится.
На практике встречается ряд других не основных схемных (структурных) и параметрических
решений, которые могут быть не учтены при постановке задачи в основных критериях, напри-
мер, узел компенсации нестабильности частоты гетеродина, синтезатор частоты, развязывающие
цепи, фидерные устройства и пр. В этих случаях оптимизация подсистем производится по более
частным показателям качества системы и узлов (см. [23]).
Объем и вес аппаратуры могут оказаться существенными показателями качества системы,
особенно для бортовой части аппаратуры. Поэтому для бортовых элементов используется соот-
ветствующая статистика.
И еще несколько соображений об оптимизации совмещенного сигнала РТС.
В зависимости от назначения РТС и технических требований к ней, т. е. от того, какие пара-
метры измеряются, в каком диапазоне и с какой точностью, можно получить набор гармоник,
позволяющих решить комплексную задачу. Вся проблема синтеза оптимального совмещенного
сигнала РТС будет теперь заключаться в том, чтобы найти такую общую форму сигнала, из ко-
торой все наборы гармоник можно было бы получить в приемнике с наименьшими взаимными и
флуктуационными помехами. В случае, когда РТС располагает информационными каналами с
цифровыми сигналами, создать оптимальный совмещенный сигнал еще сложней. Тогда совме-
щенный сигнал может представлять собой ансамбль ортогональных или противоположных сиг-
налов, содержащий, кроме того, набор гармоник для измерительных каналов. Неплохо, если
требованиям измерительных каналов удовлетворяет, например, тактовая частота, цикловая час-
тота и их гармоники и комбинации. Использование гармоник тактовой и цикловой частоты и их
комбинационных частот возможно, поскольку несущественно снижает отношение сигнал / шум
в измерительных каналах.
93
5. Оптимизация систем навигации и единого времени
Системы навигации и единого времени предназначены для морской, воздушной и наземной
навигации объектов. От качества работы такой системы зависят не только качественные показа-
тели их работы, но и вообще выполнение ими своих задач. Одними из самых эффективных
средств сверки времени считаются в настоящее время спутниковые системы навигации и едино-
го времени. Следует ожидать, что спутниковые, или бортовые, СЕВ будут использовать совме-
щенные составные сигналы, несущие информацию о шкале времени и (или) свои координаты.
Естественно поэтому рассмотреть такую задачу оптимизации СЕВ, которая учитывала бы не
только процесс синхронизации шкал времени потребителей по шкалам подвижных хранителей
времени, но и синхронизацию шкал подвижных хранителей времени по шкалам центральных
эталонов времени, и учитывала бы применение сложных сигналов как более общего случая ис-
пользования сигналов.
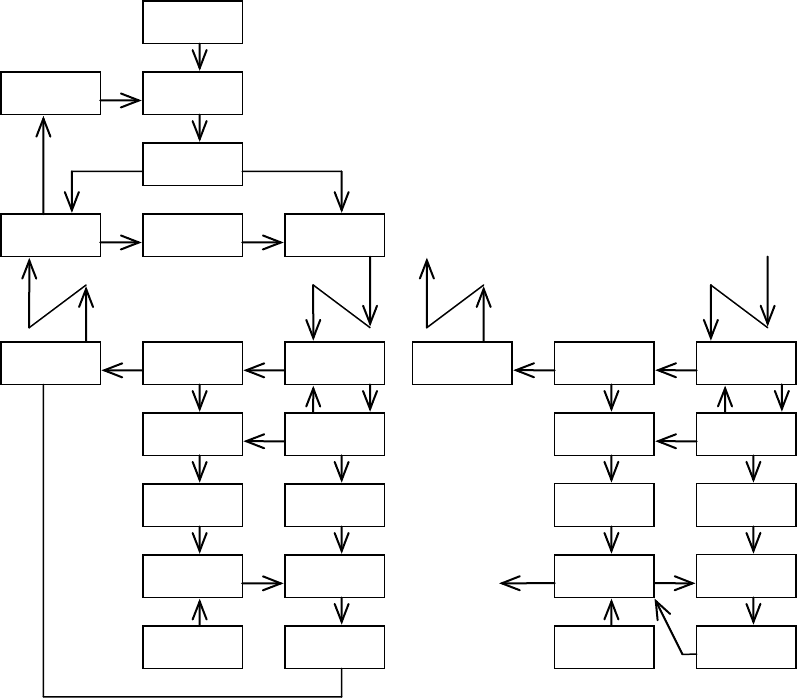
Поэтому в данном разделе оптимизируется один их самых общих вариантов СЕВ (рис.
5.1.1), использующей сложные сигналы, с анализатором на земле и коррекцией шкалы на борту.
Математическое описание задачи параметрического синтеза является, тем не менее, достаточно
общей, чтобы описывать целый класс систем того же назначения. Общность задачи объясняется
общностью формы используемых критериев точности, или дисперсии, сверки времени и ассиг-
нований на систему, учитывающих, тем не менее, особенности взаимной синхронизации шкал,
связанных радиолиниями. Тем не менее, рассмотрим одну из возможных сравнительно конкрет-
ных структур СЕВ, для которой можно применить решение данной задачи.
Рис 5.1.1
12
5
1
18
7
10
9
1
3
4
15
14
16
8
11
17
13
2
ЦП
1
3
4
15
14
16
8
11
17
13
2
ММП
94
5.1. Описание структуры и принципа действия системы единого времени
Для определенности формализации задачи опишем структуру СЕВ с подвижным хранителем
шкалы времени высокой точности. Структура системы (рис. 5.1.1) является типовой. Система
состоит из следующих функциональных блоков:
1 и 2 — наземные и бортовой передатчики,
3 и 4 — генераторы зондирующей сигнальной последовательности,
5 и 6 — наземные и бортовой приемники радиосигнала,
4 и 7 — генераторы опорной сигнальной последовательности,
8 и 9 — наземные и бортовой стандарт частоты,
10 и 11 — формирователи шкал времени,
12 — блок коррекции шкалы,
13 — дальномер,
14 — анализатор,
15 — блок формирования команд коррекции,
16 — блок модуляции,
17 — блок ввода
t
з
,
18 — демодулятор — формирователь сигнала ошибки.
Сочетание в одной системе каналов сверки времени и каналов измерения дальности является
чрезвычайно удачным в том смысле, что для точной синхронизации шкал времени информация
о дальности необходима, а для точного измерения дальности необходимо хорошо синхронизи-
ровать шкалы. Проблема оценивания дальности при использовании сложных сигналов может
облегчать проблему поиска синхронизации сигнала по задержке с опорным сигналом. Поэтому
интересы СЕВ и измерителя дальности могут гармонично сочетаться.
Информацию о бортовой шкале времени блока 9 несет начало периода сигнальной последо-
вательности. Бортовая шкала времени периодически, в конце допустимого периода хранения
времени синхронизируется со шкалой Центрального пункта (ЦП), а в течение периода хранения
служит эталонной для синхронизации шкал потребителя.
При подлете борта к зоне видимости Центрального пункта включается бортовой передатчик
2. В пределах априорно известных эфемерид осуществляется поиск синхронизации принимаемо-
го сигнала с опорным путем перестройки генератора сигнальной последовательности 7 и поиск
по частоте приемником. При захвате сигнала полученная информация о запаздывании, о дально-
сти с точностью хранения времени и ошибки синхронизации генератора сигнальной последова-
тельности 7 по отношению к генератору сигнальной последовательности 4 используется для та-
кой подстройки зондирующей сигнальной последовательности 3, при которой осуществляется
синхронизация генератора сигнальной последовательности 4 по генератору сигнальной последо-
вательности 3. Ошибка синхронизации генератора сигнальной последовательности 7 выделяется
временным дискриминатором приемника 5 и с помощью, например, фазоразностной череспери-
одной модуляции 16 передается на Центральный пункт для точной подстройки генератора псев-
дослучайной последовательности 3. Информация о дальности дальномера 13 используется для
соответствующего сдвига эталонной шкалы Центрального пункта. Таким образом, при сравне-
нии бортовой шкалы с учетом запаздывания за счет текущей дальности со сдвинутой шкалой
Центрального пункта в анализаторе 14 выделяется информация об уходе бортовой шкалы, кото-
рая используется для коррекции с помощью блока 12 бортовой шкалы. На местном пункте, или
местном приемном пункте СЕВ, местная шкала времени синхронизируется с бортовой.
5.2. Постановка задачи оптимизации СЕВ
Точность сверки времени системы единого времени есть качественный показатель, характе-
ризующий технические возможности системы и определяющий степень выполнения своей зада-
чи потребителями.
Дисперсию
Д
мп
ошибки сверки времени местного приемного пункта (СЕВ) в соответствии
со структурой рис. 5.1.1 можно определить в виде
Д Д Д Д
мп ск
k
х j
j
d
=
∑
+ +
∑
= =1
4
1
1
р
, (5.2.1)
где
Д
ск
— дисперсия ошибки синхронизации опорного и принимаемого сигналов приемни-
ков «борта» и «земли» центрального пункта (ЦП) и местного приемного пункта,
95
Д
хр
— дисперсия неучтенной ошибки хранения времени в конце периода между сверками
времени шкал,
d
1
— число оптимизируемых блоков системы, относящихся к наземной и бортовой аппара-
туре, определяемых своими дисперсиями ошибок
Д
j
, которые они вносят в дисперсию
Д
мп
.
В предположении достаточно большого необходимого для качественной работы отношения
сигнал / шум на выходе приемников можно считать [22], что дисперсия оценки времени запаз-
дывания (ошибки синхронизации сигналов
Д
ск
) будет описываться в соответствии с разделами
3, 4 и может быть представлена в факторизованном виде.
Д
N
Э F
N
F X
ск
k
k k
k
k эi
i
n
= =
∏
=
0 0
1
1
2
2
∆
∆
, (5.2.2)
где
N
k0
— спектральная плотность шума,
∆F
k
— полоса пропускания радиоприёмника
( )
Э Э X y
k k эi i
i
=
∏
0
— энергия сигнала,
X
эi
— монотонная функция от параметров
y
i
— расстроек, возмущений и неидеальностей,
влияющих на энергию сигнала на выходе приемнике.
Для непрерывных сигналов энергию
Э
k0
можно записать в виде
Э P T
k k0
=
, (5.2.4)
где
P
k
— мощность сигнала на выходе соответствующего приемника,
T — период сигнала.
В свою очередь
( )
P
P
R
X y
k
з б б з
k
pi i
i
=
∏
− −прд k
λ λ
π
2 2
4 4
4( )
, (5.2.5)
где
P
прд k
— мощность соответствующего передатчика,
R
k
— максимальная дальность,
λ
з б б з− −( )
— длина волны прямой (обратной) радиолинии,
X
pi
— монотонные функции технических параметров
y
i
, таких как КНД, КПД, диаграмм
направленности антенн и т. д., т. е. параметров, влияющих на мощность сигнала.
Спектральную плотность шума на выходе соответствующего приемника можно записать
следующим образом
( )
( )
N Ш Ш kT L
const
X y
k б зк p
p
Ш
Шi i
i
0
= °
∏
=
∏
( )
, (5.2.6)
где
Ш Ш
б з УВ б(з)( )
≅
— коэффициент шума бортового, или земного приемника,
( )
kT° = ×
−
4 10
21
Дж
,
L
p
— соответствующие коэффициенты усиления и затухания,
X
Шi
— монотонные функции параметров
y
i
— обратных величин от технических парамет-
ров
L
p
и Ш.
Учитывая (5.2.3—5.2.6), дисперсию
Д
ск
(5.2.2) можно представить в общем виде
Д
A
X
ск
k
i
i
n
k
=
∏
=1
, (5.2.7)
где
A
k
— постоянная, неоптимизируемая величина на максимальной дальности.
Если разделить «фазовые» параметры
X
i
на группы, относящиеся к одному из концов ра-
диолинии, то получим выражение для критерия оптимизации
96
Д
X
A
X
A
X
X
A
X
A
X
X
мп
jб
j
n
iз
i
n
m змп
m
kб
k
n
lз
l
n
t змп
t
q
q
n
=
∏
∏
+
∏
+
∏
∏
+
∏
+
∑
1 1
2
1
3
4
7
1 3
2 4
n
n
5
6
, (5.2.8)
где
X
k
и
X
j
— «фазовые» параметры, описывающие приемную и передающую аппаратуру
борта,
X
i
и
X
l
— наземную приемную и передающую аппаратуру центрального пункта (ЦП),
X
m
и
X
t
— наземную приемную и передающую аппаратуру местного приемного пункта
(МПП),
X
q
— «фазовые» параметры остальных блоков системы единого времени.
Из (5.2.8) следует, что
min Д
мп
достигается при предельно малых значениях
X
q
и предель-
но больших
X
i( j, k, l, m, t)
. Однако реализация предельных
X
i
является сложной научно-
технической проблемой, вызывающей значительное возрастание расходов при незначительном
улучшении качества.
Поэтому, пользуясь высокой корреляцией либо функциональной зависимостью между стои-
мостью блока и описывающими его техническими параметрами [25—27], можно сформулиро-
вать ограничения на параметры в виде неравенства
( ) ( )
[ ]
C C X y X y
r r r rs rs
r
d
≤
∑
=
1 1
1
, ,
, (5.2.9)
где С — ассигнования на систему единого времени,
C
r
— многомерные функции регрессии стоимости блоков на параметры
y
rs
при постоян-
ных значениях неоптимизируемых параметров,
S — число параметров, описывающих блоки r.
Задача состоит в том, чтобы найти
min Д
мп
при ограничениях (5.2.9) и определить опти-
мальные параметры и стоимости блоков, при которых он достигается. Однако, чтобы получить
решение задачи (5.2.8, 5.2.9) выпуклого программирования в общем аналитическом виде, как и
прежде, линеаризуем ограничения (5.2.9) в окрестности вектора параметров
y
0
какого-либо об-
разца системы того же класса
( )
( )
C C X X C X X C
r
r
d
u u u
u
N n
q q q
q
n
0
1
0 0
1
0 0
1
7 7
= =
−
=
∑
+
′
−
∑
+
′
−
∑
≤
, (5.2.10)
где
( )
X X y
u q u q u q0 0( ) ( ) ( )
=
,
( )
C C X X
r r r rs0 0 1 0
= , ,
,
′
= ×C
C
y
y
X
u q
u q
u q
u q
u
q
0 ( )
( )
( )
( )
( )
∂
∂
∂
∂
,
X X
u q u q( ) ( )
=
0
,
N n n n n n n n= + + + + + +
1 2 3 4 5 6 7
.
Поэтому выбор такого вектора параметров
y
0
, как отмечалось выше, использует по сущест-
ву априорные сведения об оптимальном решении.
Задачу, формализованную в виде
min Д
мп
(5.2.8) и ограничений (5.2.10) ,можно решить ме-
тодом динамического программирования [28].
5.3. Решение задачи оптимизации СЕВ
Определим сначала
{ }
min
min
Д
ск
=
∏
X
k
i
i
n
i
k
A
X
(5.3.1)
при
′
∑
≤ −
∑
+
′
∑
= =
C X C C C X
i i
i
n
nk i
i
d
i i
i
n
k k k
0 0
1
0 0
1
,
97
где
C
nk
— ассигнования на
d
k
блоков.
Можно показать, что за
n
k
шагов
{ }
( )
X
ск nk nk
k i
i
n
nk i
i
d
i i
i
n
k
n
i
k
k k
k
Д F C
A C
C C C X
n
min
= =
′
∏
−
∑
+
′
∑
=
= =
0
1
0
1
0 0
1
(5.3.2)
при
X
C
C
nk э
i
i opt
k
n
=
′
0
.
Затем последовательными шагами ищется
min Д
мп
(5.2.8) при ограничениях (5.2.10). Для
простоты предположим, что
n n n n n n
1 2 3 4 5 6
= = = = =
.
Тогда можно определить
( )
( ) ( )
[ ]
F C F C F C
C
C
n n n n
n
n
1 5 1 5 1 1 5 5
1
3
, ,
min
= +
при
C C C
n n1 5 1 5
+ =
,
.
Таким образом,
( )
( )
( )
F C
A A
C B B
n
m i
n
1 5 1 5
11 31
1
1 5
, ,
,
=
+
+ +
+
(5.3.3)
при
( )
C
A C B A B
A A
n1 opt
11 1,5 m 31 i
11 31
=
+ −
+
,
где
A A n C
n
i
i
n
n
11 1 0
1
1
=
′
∏
=
+
,
A A n C
n
m
m
n
n
31 3 0
1
1
=
′
∏
=
+
,
B C C X
i i
i
d
i i
i
n
= −
∑
+
′
∑
= =
0
1
0 0
1
1
,
B C C X
m m
m
d
m m
m
n
= −
∑
+
′
∑
= =
0
1
0 0
1
3 1
.
Аналогично
( )
( ) ( )
[ ]
( )
( )
F C F C F C
A A
C B B
C
C
n n n n
n
l t
n
n
n
4 6 4 6 4 4 6 6
21 41
1
4 6
4
6
, ,
,
min
= + =
+
+ +
+
(5.3.4)
при
C C C
n n4 6 4 6
+ =
,
.
( )
C
A C B A B
A A
n4 opt
21 4,6 l 4,1 t
21 41
=
+ −
+
,
где
A A n C
n
l
l
n
n
21 2 0
1
1
=
′
∏
=
+
,
A A n C
n
t
t
n
n
41 4 0
1
1
=
′
∏
=
+
.
Далее находится
( ) ( )
( )
( )
[ ]
( )
F C F C F C
A A A
C B B B
C
C
n n
n
j
n
m i j
n
n
1 1 2 2 1 5 1 5
2
11 31
1
1
2
1
1 5
2
= =
+
+ + +
+
,
min
, ,
(5.3.5)
при
C C C
n2 1 5 1
+ =
,
.
( )
C C B B B
n2 opt 1 m i j
= + + −
1
2
,
98
где
A n C
j
n
j
j
n
n
=
′
∏
=
+
0
1
1
.
Аналогично
( ) ( )
( )
( )
[ ]
( )
F C F C F C
A A A
C B B B
C
C
n n
n
k
n
k l t
n
n
2 2 3 3 4 6 4 6
2
21 41
1
2
2
3
4 6
2
= =
+
+
+ +
+
,
min
, ,
(5.3.6)
при
C C C
n3 4 6 2
+ =
,
.
( )
C C B B B
n3 opt 2 l t k
= + + −
1
2
,
где
A n C
k
n
k
k
n
n
=
′
∏
=
+
0
1
1
.
Следующим шагом определяется
( ) ( ) ( )
[ ]
( )
F C F C F C
E E
C B
c c
C
C
n
n
n
n
n
n
c
n
= + =
+
+
∑
+ +
1
2
1 1 2 2
2
1
1
2
2
1
2
2
2
2
min
(5.3.7)
при
C C C
c1 2
+ =
.
( )
( )
C
E
C B B B E B B B
E E
n
n
n
n
n
n
n
n
1 opt
c k l t m i j
=
+ + + − + +
+
+ +
+ +
1
1
2
2
1
2
1
1
2
2
1
2
,
где
( )
E A A A
j1 11 31
= +
,
( )
E A A A
k2 21 41
=
+
,
B B B B B B B
m i j k l t
∑
= + + + + +
.
Предположим для простоты, что для конкретных
C
q
хранителей шкал времени найден
min X
q
q
n
7
∑
при соответствующих ограничениях
C C
q
q
d
х
q
=
∑
=
1
р
.
Тогда можно проделать последний шаг
( ) ( )
( )
[ ]
F C Д C F C X
мп мп
C
C
х
с
х
= = +
min
min
р
р1 1
при
( )
C C C X X C
c х х х х
+ +
′
− ≤
0 0 0р р р р
.
Отсюда
( )
( )
F C X
E E
C
C C B
C
мп х
n
n
n
n
n
n
n
n
х
n
n
х
х
= +
+
′
+
− −
∑
′
+
+ +
+
+
0
2
2 1
1
1
2
2
1
2
2
2 1
0
2
2 1
0
0
2
р
р
р
р
. (5.3.8)
C C E E B
c opt х
n
n
n
n
n
n
=
′
+
−
∑
+ +
+
0 1
1
2
2
1
2
2 1
р
.
99
Оптимальные ассигнования и параметры блоков находятся из (5.3.8—5.3.12) в обратном по-
рядке.
Тогда
C
E
E
A
A
B
n i
1
11
0
31
11
1
opt
=
+
−
,
C
E
E
B
n j
2
11
0
opt
= −
,
C
E
E
B
n k
3
22
0
opt
= −
,
C
E
E
A
A
B
n t
4
22
0
41
21
1
opt
=
+
−
,
C
E
E
A
A
B
n m
5
11
0
11
31
1
opt
=
+
−
,
C
E
E
A
A
B
n l
6
22
0
21
41
1
opt
=
+
−
,
X
C
n C
u
nu
k u
=
′
0
и
( )
y y
X
u u u
=
,
где
E E
n
n
11 1
1
2
=
+
,
E E
n
n
22 2
1
2
=
+
.
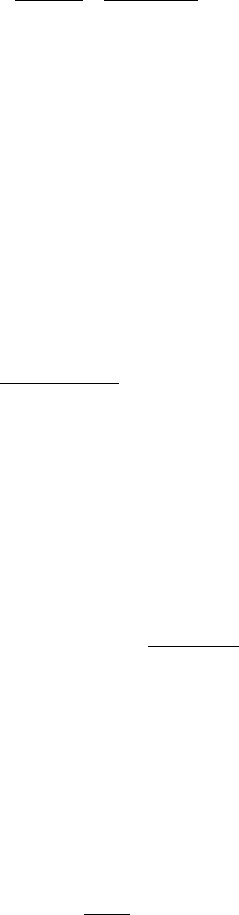
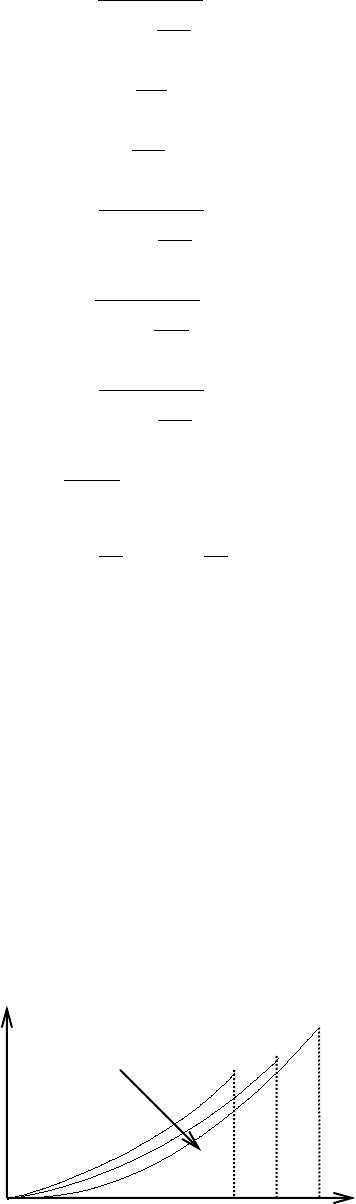
Обсуждение результатов.
Выражение для оптимальной оценки
F С
мп
( )
(5.3.8) станет понятным, если учесть характер
кривых
( )
C C X
u u u
=
и
( )
C C X
х х хр р р1 1 1
=
рис. 5.3.2, 5.3.3. В практически интересном случае
y
0
близок к предельному технически реализуемому вектору. С развитием техники и производства
′
C
0 хр
и
′
C
0 u
имеют тенденцию к возрастанию, а
C
0 хр
и
C
0 u
— к убыванию, поскольку в окре-
стности
y
п едр
стоимость блоков r убывает значительно медленнее. Ввиду возрастания парамет-
ров
E
1
и
E
2
оптимальное решение
y
u opt
не может быть слишком близким к
y
п едр
. Не может
y
u opt
быть слишком далеко от
y
п едр
, поскольку
Д С
мп
( )
возрастала бы за счет малости
y
u opt
,
′
C
0 u
и
B
∑
. Поэтому, как и результаты статистических усреднений,
C
u(q)
, параметры
′
C
0 u(q)
,
C
0 u
определяются технико-экономическим состоянием производства.
0
C
U
t → ∞
3
2
1
X
OUпред
3
2
X
U
Рис 5.3.1
100
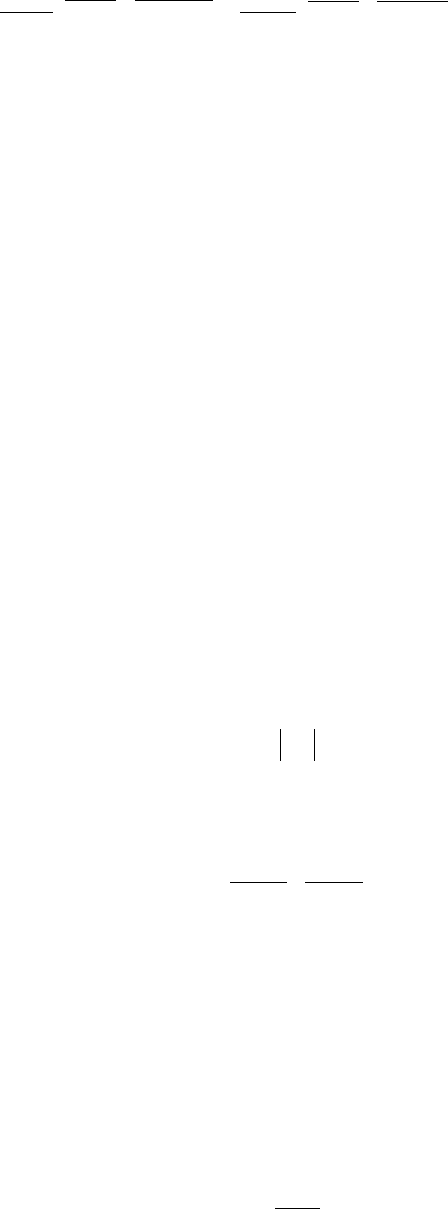
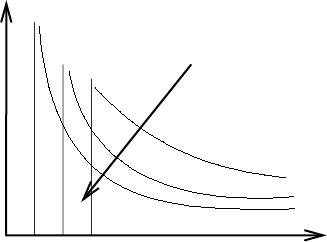
Таким образом, в результате общего решения задачи (5.2.8, 5.2.10) найдено оптимальное рас-
пределение ассигнований по блокам и оптимальные параметры системы. Получена зависимость
оптимальной дисперсии оценки сверки времени от ассигнований для области хорошей аппрок-
симации (5.2.9) линеаризованными ограничениями (5.2.10). Решения пригодны для систем еди-
ного времени и с простыми сигналами при уменьшении числа групп параметров до 4-х, по-
скольку в выражениях для критериев будут отсутствовать дисперсии ошибки синхронизации
сложных сигналов. Из (5.3.8) следует, что для уменьшения оптимальной дисперсии оценки в
первую очередь следует улучшать бортовую аппаратуру. Однако улучшать аппаратуру бортово-
го стандарта частоты (рис. 5.3.3) для системы беспредельно полезно, но не целесообразно, по-
скольку оптимальная дисперсия оценки незначительно убывает при больших изменениях
′
C
0 хр
и при относительно небольшом уменьшении
X
0 хр
.
C
kp
t → ∞
X
kp
X
kp пред
3
3
2
2
1
1
Рис 5.3.2