Живоглядов В.Г. Теория движения транспортных и пешеходных потоков
Подождите немного. Документ загружается.

493
62,4542124*b + 23,55976303*lg a = 50,121326
23,55976303*b + 9*lg a = 18,55776721
Для нахождения b и lga вычислим главный определитель системы:
∆ = 62,4542124 23,55976303 = 7,02547757 ≠ 0
23,55976303 9
Так как он не равен нулю, то найдем b и lg a по формулам Крамера: lg a
= - 3,108093903, b = 1,975002558 или a = 10
– 3,108093903
= 0,000779662, b =
1,973069324
Эмпирическая зависимость примет вид: (b>0 – параболическая) у = ах
в
= 0,000779662* х
1,975002558
.
Для определения точности выбора эмпирической кривой, т.е. макси-
мального отклонения точек таблицы от кривой у = 0, 000779662 * х
1,975002558
составим сравнительную табл. 5.10
Таблица 5.10
Результаты отклонений табличных значений от значений, вычисленных по
эмпирической формуле
x
i
y
i
y
i
выч
γ
i
%
100
200
300
400
500
600
700
800
900
6,90
27,38
61,15
107,85
167,60
239,850
324,26
420,64
528,75
6,948826746
27,31784868
60,84532037
107,394368
166,8702936
239,2005609
324,3263798
422,1983367
532,773826
0,048826746
0,062151316
0,304679626
0,455632
0,72970636
0,64943912
0,06637981
1,55833672
4,02382595
0,707634001
0,22699531
0,498249593
0,422468243
0,435385656
0,270768864
0,020471168
0,37046803
0,461007272
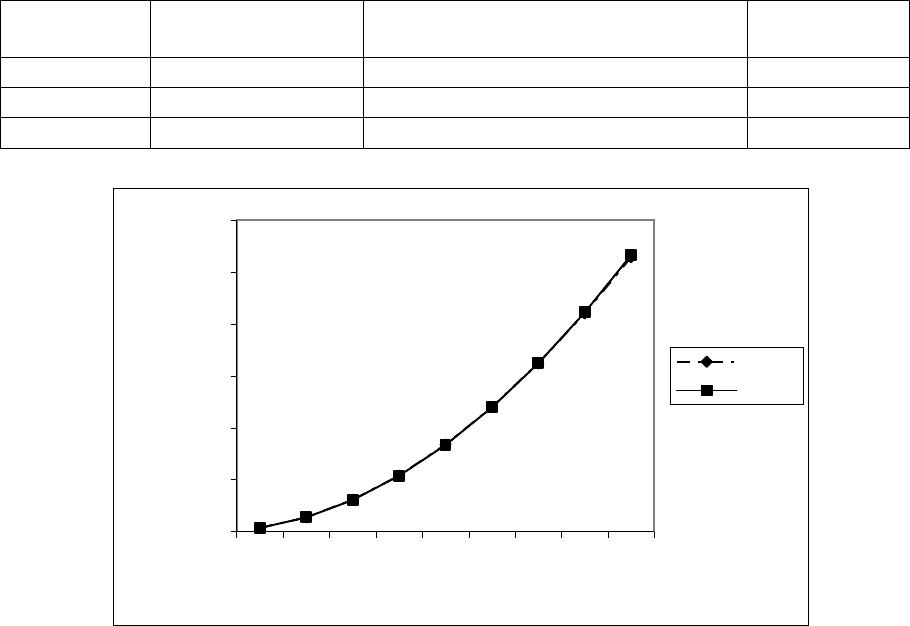
Результаты отклонений табличных значений от вычисленных по эмпи-
рической формуле представлены на рис. 5.48.
Таким образом, размах отклонений значений табличных, от вычислен-
ных при слиянии составит 0,048826746 4,02382595, а среднее взвешенное
отклонение составляет 0,0204711680,707634001%, что дает основание под-
твердить экспериментальные данные.
571
494
Таблица 5.11
Зависимость интенсивности конфликтования при от интенсивности прибытия
транспортных средств к его стоп-линии
Характери-
стика
Вид зависимости Уравнение зависимости Погрешность,
%
А
параболическая у =0,000152807 * х
1,979084491
0,002
3,699
В параболическая у =0,000467852 * х
1,974987807
0,02
0,76
С параболическая у = 0, 000779662 * х
1,975002558
0,02
0,71
В заключение можно сделать некоторые выводы:
1. В теоретических проработках и выборе вариантов схем ОДД целесооб-
разно учитывать не только конфликтующие первичные, за ними следующие
вторичные пары транспортных средств, но и вероятность их синхронного
контакта при отклонениях, слияниях и пересечениях. Синхронность можно
применять в интервале 0,3 ÷0,5 с/ТЕ.
2. Функционирование перекрестка желательно рассматривать не только по
функциональному критерию эффективности использования потенциала пе-
рекрестка (пропускной способности проезжих частей, возможностей их ко-
личественного увеличения и т.п.), но и по функциональному критерию
транспортной опасности – коэффициенту транспортной опасности, посколь-
ку последний линейно связан с БДД.
0
100
200
300
400
500
600
1 2 3 4 5 6 7 8 9
Интенсивность движения, ТЕ/ч
Интенсивность конфликтования
при пересечении
y i
yi выч
Рис. 5.48. Результаты отклонений табличных значений от значений, вычис-
ленных по эмпирической формуле
572
495
3. Целесообразно проектировать регулируемые и нерегулируемые перекре-
стки в одном уровне с дополнительными разгонно-накопительными проез-
жими частями на всех направлениях соответствующим образом узаконить
это в ГОСТе.
4. Желательно канализировать движение на перекрестках и подходы к ним,
что также будет способствовать упорядочению и обеспечению БДД. Пеше-
ходные переходы безопаснее размещать не в местах маневрирования – от-
клонений, пересечений и слияний ТС с ТП, а до и после них. Весьма опасно
размещать остановки МПТ в границах разгонно-накопительных проезжих
частей. В крайнем случае в этих границах разрешать остановки лишь на базе
заездных карманов защищенных островками безопасности.
5. Разработанная теория конфликтования транспортных средств, которое
возможно в процессе их маневрирования и неудавшегося взаимодействия
при этом позволит глубже исследовать конфликтные ситуации при различ-
ных схемах ОДД, применять бесконфликтными или менее конфликтные схе-
мы ОД и оценивать уровень БДД более достовернее.
6. Оценку уровня обеспечения и прогнозирования БДД можно осуществлять
с помощью функционального критерия – коэффициента транспортной опас-
ности, который, на наш взгляд, более достоверен в результативном аспекте.
7. Целесообразно разработать и внедрить в конструкции автомобилей орга-
низационно – технические устройства по типу «Автоводитель» на электрон-
но-вычислительных и измерительных носителях, эти устройства должны не
только обеспечить выбор оптимальных вариантов обгонов, проездов пере-
крестков, но и автоматически вносить коррективы в управление ТС, исклю-
чающие конфликтные ситуации в процессе движения и особенно при манев-
рировании.
8. Поскольку ДТП является следствием невыполнения регламента ПДД по
причине их незнания, неопытности или игнорирования ПДД внедрить в
практику подготовки и проверки водительских кадров на стадии приема эк-
замена экспертизу способности водителя управлять бесконфликтно автомо-
573
496
билем, применяя для этого автотелепсихотренажи, с программой, рассчитан-
ной на 20 км дорог со сложными условиями движения, что будет на наш
взгляд, способствовать более качественному отбору водительских кадров для
работы в сложных – экстремальных условиях.
574
6. ПРИНЦИПЫ ОПТИМАЛЬНОСТИ ПРОПУСКА ПОТОКОВ
ЧЕРЕЗ РЕГУЛИРУЕМЫЙ ПЕРЕКРЕСТОК
В данном разделе дается:
– толкование понятий терминов оптимальности в пропуске ТПП и оп-
тимизации в управлении дорожным движением;
– математическое определение принципов оптимальности и связанных
с нею параметров, а также критериев их оценки в режимах CР на перекрест-
ках, которые подтверждаются конкретными экспериментальными данными.
6.1. Понятие оптимальности
Оптимальность в пропуске ТПП следует понимать как наилучшую,
наивыгоднейшую из множества рассмотренных возможностей, в аспекте ми-
нимума задержек на всех направлениях при их проезде через перекресток с
учетом максимума эффективности использования потенциала последнего.
Оптимизацию в управлении дорожным движением следует понимать
как целевой процесс, не только направленный, но и обеспечивающий эффек-
тивную эксплуатацию потенциалов проезжих частей и максимальное исполь-
зование наиболее лучших из имеющихся возможностей в пропуске ТПП на
сетях дорог и их пересечениях в частности.
Эффективность использования потенциала либо проезжей части,
либо разрешающего такта следует, на наш взгляд, понимать как степень
использования способности объекта исследования в гармоническом, т.е. в
относительном (процентном) представлении. Объектом исследования
может быть проезжая часть, перекресток, разрешающий такт, цикл СР,
дорожная сеть, ТПП в динамике, БДД и т.п. Потенциал (способность)
объекта исследования, как правило, принимается за единицу (100 процен-
тов).
6.2. Определение принципов оптимальности
Наиболее выгодный режим СР отличается такими длительностями цик-
лов светофора С и их основных t
зел
, t
кр
, а также промежуточных Т
o
l
тактов,
при которых разрешающие такты используются для пропуска ТС только из
575

очереди без остатка с интервалом
jk
<
1
jk
и отмечаются при этом мини-
мальные задержки ТС и ПП в каждом цикле С. Процесс поочередного про-
пуска потоков через перекресток улиц и дорог считается нормальным только
в том случае, когда на подходах к перекрестку не образуются заторы в дви-
жении, т.е. отсутствуют не пропущенные ТЕ за несколько последовательных
циклов С.
Оптимальное СР движения понимается как совокупность наиболее вы-
годных режимов, длительность тактов которых обеспечивает нормальное
протекание процессов пропуска ТПП через перекресток при реальных исход-
ных или заданных значениях характеристик ТП λ
jk
, τ
jk
, T
jk
, t
rjk
.
.
Каждый процесс пропуска потоков через перекресток характеризуется
основными признаками, определяющими его качество, так называемыми по-
казателями качества. К ним относятся, например: длительность задержки у
стоп-линии, с; приемистость ТС, т.е. ускоренное трогание автомобиля, трам-
вая с места, при этом реакция водителя должна стремиться к нулю (t
r
=0);
занятость зоны перекрестка при проезде через него во времени – для
одной ТЕ, с; скорость приведения в движение первого ТС из очереди, обра-
зовавшейся перед перекрестком, м/с; временной интервал между троганием с
места первой и последней ТЕ, находящихся в очереди, с; временной интервал
между передними буферами, бамперами ТС при пересечении стоп-линии,
с/ТЕ; размеры очереди, ТЕ/цикл; длительность пропуска очереди ТС – расса-
сывания, с/цикл; интервал времени зеленого такта, оставшийся для проезда
перекрестка сходу – без предварительной остановки перед ним для всего по-
тока j-го направления в пределах цикла; эффективность использования по-
тенциала разрешающего такта; интенсивность пропуска очереди при разре-
шающем такте цикла светофора.
Кроме того, интенсивность протекания процессов пропуска ТПП зави-
сит от условий движения как в зоне перекрестка, так и на подходах к нему.
576
Далее, при математическом описании процессов оказывается, что пока-
затели качества О и УДД являются функционалами от управляющих воздей-
ствий, рассматриваемых как функции времени. Поэтому задачи, возникаю-
щие при разработке теории пропуска ТПП или теории движения ТПП, – это
вариационные задачи о минимуме и максимуме в условиях случайности и
многоэкстремальности соответствующих функционалов. Одной из основных
особенностей теории оптимального регулирования движения, не позволяю-
щей непосредственно использовать методы и результаты классического ва-
риационного исчисления, является необходимость учета многоэкстремально-
сти, случайности и ограничений, наложенных на управляющие воздействия и
регулируемые параметры системы. Поэтому основным звеном в О и УДД бу-
дет выбор методов расчета длительностей цикла светофора, его фаз и тактов,
соответствующих требованиям оптимального регулирования движения на
перекрестке. При этом здесь должны быть учтены местные особенности и
планировки его зоны, состав ТП и уровень ОД, т.е. задачу следует решать в
главных параметрах. Выбор наиболее выгодной длительности цикла свето-
фора С, отвечающей требованиям оптимального регулирования движения на
перекрестке, выполняется различным путем (глава 2 [71, 82, 85 и другие]).
Отметим, что цикл С находится в прямо пропорциональной зависимости от
размеров и сложности перекрестка, что отражает суммарная длительность
промежуточных тактов (желтых сигналов)
0
0
1
n
l
l
T T
, где (l = 1, 2, …, n) и
от суммы динамических характеристик ТП (q+r) т.е. от гармонических раз-
меров движения по пересекающимся направлениям. Каждому перекрестку с
его размерами и сложностью геометрических параметров T
o
l
и каждой сумме
величин динамических характеристик ТП (q+r) соответствует своя наиболее
выгодная (оптимальная) длительность цикла светофора С, которая получает-
ся только расчетным методом. Допустим, что q + r = 0, тогда цикл
С=T
o
=
1
1
n
o
l
T
, а если q+r=1, то длительность цикла С стремится к бесконеч-
577
ности. Если на перекрестке с жестким или гибким управлением теоретически
принять длительность цикла C<
0
1
rj
T nt
q r
(где n=1, 2, 3 и 4 – номер фазы, со-
ответствующей числу фаз), то на подходах к перекрестку возникнут заторы.
Скорость образования затора зависит от величины разности
0 0
1 1
rj rj
T nt T nt
C
q r q r
: чем больше величина ∆
0
1
rj
T nt
q r
, тем выше ско-
рость образования затора, т.е. за меньшее количество циклов возникнет затор
в движении. А если принять C>
0
1
rj
T nt
q r
, то увеличатся очереди и, соответ-
ственно, задержки ТС перед перекрестком и одновременно уменьшится ин-
тенсивность пропуска ТП через перекресток и эффективность использования
разрешающего такта цикла СР в единицу времени и в целом. Это пропорцио-
нально снизит использование пропускной способности – потенциала улиц и
дорог. Увеличение очереди и задержки, снижение интенсивности пропуска
ТП и эффективности использования пропускной способности перекрестка за-
висят от величины разности ∆C, C–
0
1
rj
T nt
q r
=∆C. Чем больше величина ∆C,
тем больше размеры очереди и задержки ТС и тем меньше время интенсив-
ного пропуска ТП через перекресток при разрешающем такте, а также эф-
фективность использования его пропускной способности, т.е. остается неэф-
фективно использованное время в этом такте для пропуска потоков. Дли-
тельности основных (разрешающих и запрещающих) тактов должны строго
отвечать динамическим характеристикам, т.е. размерам ТП в единицу време-
ни по соответствующим направлениям движения через перекресток. Допус-
тим, что доля разрешающего такта α
J
, будет
j=1,3
<
1
rj o
rj o
t r qT
t T q r
. При этом
образовавшаяся очередь на нечетных направлениях пропускается не полно-
стью, и создаются заторы, поскольку недостаточна длительность разрешаю-
578

щего такта, а на четных уменьшаются размеры задержек, потому что дли-
тельность запрещающего такта несколько меньше, чем надо. Следует отме-
тить, что при этом снизится степень использования пропускной способности
потенциала проезжей части за цикл, в связи с тем, что длительность разре-
шающего такта несколько больше, чем требуется. Следовательно, перекре-
сток нормально функционировать не будет. При
j=1,3
>
1
rj o
rj o
t r qT
t T q r
на не-
четных направлениях уменьшатся очереди и, соответственно, задержки перед
перекрестком, но снизится степень использования пропускной способности,
а на четных – образуются заторы в движении.
Несмотря на то, что оптимальное СР движения вытекает из самой тео-
рии (глава 2), в данной главе на экспериментальных материалах будет иссле-
дована оптимальность в режимах СР. Кроме того, будет представлен анализ
других параметров, связанных с оптимальным СР.
Теоретические расчеты ведутся по средним значениям исходных харак-
теристик при установившемся стационарном потоке. В действительности
движение ТС в потоке случайно, они прибывают к перекрестку через различ-
ные временные интервалы, отклоняющиеся от средней величины.
Таким образом, длительности циклов светофора и их такты, рассчитан-
ные по средним значениям исходных параметров λ
i
j
, τ
i
j
, T
i
j
, могут быть
слишком велики, когда количество прибывающих ТС меньше среднего коли-
чества, или слишком малы, когда количество прибывающего транспорта
больше среднего. В первом случае длительность разрешающего такта может
быть уменьшена, во втором – увеличена, но при этом ТС будут накапливать-
ся и дополнительно задерживаться. Если вести расчеты по максимальному
пределу, то создадутся ничем не оправданные длительные задержки перед
перекрестком, а по минимальному пределу – заторы. Учитывая, что отклоне-
ния от средних значений по амплитуде и частоте незначительны и эти «пики»
ликвидируются за 1–3 цикла, то расчет по средним значениям, по нашему
мнению, вполне оправдан.
579
6.3. Исследование оптимальности в режимах CР
На основании анализа причин задержек можно сделать заключение, что
наименьшая задержка ТС данного потока происходит при наименьшей сум-
марной длительности запрещающего и промежуточных тактов. Однако ин-
тервал запрещающего такта для каждой фазы зависит от суммы длительно-
стей разрешающих тактов других фаз (при трехфазных и более циклах СР) с
добавлением длительности промежуточных тактов всех фаз цикла. В то же
время, как выше уже подчеркивалось, длительность разрешающего такта лю-
бой фазы цикла должна быть достаточной в среднем для пропуска через пе-
рекресток всей очереди с учетом запаздывания трогания с места первой ТЕ
очереди и количества ТС, прибывших в очередь в течение разрешающего
такта.
В данном разделе выполнен анализ оптимальной длительности циклов
и тактов светофора, результаты которого помещены в табл. 6.1–6.2 и показа-
ны в графиках рис. 6.1–6.2. Для исследования приняты три группы обычных
реальных перекрестков, которые обозначены через “А”, “В”, и “C”. Перекре-
стки характеризуются следующими исходными параметрами на каждом на-
правлении (j=1, 2, 3, 4):
Группа “A” ((А
1
и А
2
) табл. 6.1 и 6.2, рис. 6.1 и 6.2): интенсивность при-
бытия λ
j
=0, 2 и 0, 28 ТЕ/с; временной (усредненный для всех маневров) ин-
тервал между передними бамперами ТС τ
j
=2, 1 с/ТЕ.
Группа “A” ((А
3
и А
4
) табл. 6.3 и 6.4, рис. 6.3 и 6.4): интенсивности при-
бытия 0, 1 и 0, 24 ТЕ/с; τ
j
=1, 5 и 2 с/ТЕ; суммарная длительность промежу-
точных (желтых) тактов Т
о
1
+Т
о
2
= 4 + 4 = 8 с.
Группы “B” и “C” (табл. 6.5–6.8 и 6.9–6.11; рис. 6.5 ÷ 6.13 и 6.14÷6.19):
λ
j
=0, 1÷0, 32 ТЕ/с и λ
j
= 0, 1 – 32 ТЕ/с; τ
j
= 1, 5 – 3 с/ТЕ и 1, 5 – 2, 5 с/ТЕ соот-
ветственно.
580