Zehnder E. Lectures on Dynamical Systems: Hamiltonian Vector Fields and Symplectic Capacities
Подождите немного. Документ загружается.

VI.4. A connection between geometry and Hamiltonian dynamics 251
and explicitly given by
Py
1
Dx
1
;
Py
2
Dx
2
;
Px
i
D 0; 1 i n;
Py
i
D 0; 3 i n:
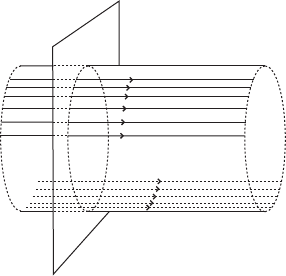
This time the solutions are straight lines orthogonal to the plane E D spanfe
1
;e
2
g.
There are no closed characteristics and no finite actions!
Z
iso
.r/
E D spanfe
1
;e
2
g
Figure VI.8. Some solutions on @Z
iso
.r/.
In view of the examples above it is tempting to explain the non-squeezing
phenomenon of Gromov from the dynamical point of view as follows. On the
boundary @B.R/ of the open ball the characteristics are all closed and have actions
equal to R
2
. Similarly, on the boundary @Z
iso
.r/ of the symplectic cylinder
the characteristics are closed and their actions are equal to r
2
. If the map '
is a symplectic embedding of the closed ball of radius R, then on the boundary
of its image the characteristics are also closed and have actions equal to R
2
.
Imagine now that there is an optimal embedding of the open ball B.R/ into the
open symplectic cylinder, in which case one is inclined to think that the boundary
of the embedded ball touches the boundary of the cylinder and that this is happening
along a closed characteristic. We then conclude in view of the invariance of the
actions that r D R. A proof of the non-squeezing theorem of Gromov along these
lines does not exist and we shall prove it in the next chapter by means of a symplectic
invariant called symplectic capacity.
Chapter VII
Symplectic invariants
This chapter is devoted to a special class of invariants of symplectic manifolds,
introduced in the framework of subsets of the symplectic standard space .R
2n
;!
0
/
by I. Ekeland and H. Hofer [33] 1989 and [34] 1990. They are called symplectic
capacities. A symplectic capacity associates with every symplectic manifold a non-
negative real number or infinity, so that three axioms are satisfied. In view of its
monotonicity axiom a symplectic capacity represents, in particular, an obstruction to
symplectic embeddings. The Gromov non-squeezing phenomenon is an immediate
consequence, as we shall first demonstrate among other simple consequences. Then
we shall construct a special symplectic capacity c
0
, the so-called Hofer–Zehnder
capacity which is of dynamical nature. It measures the minimal oscillation of
Hamiltonian functions needed to conclude the existence of a fast periodic solution
of the associated Hamiltonian vector field. In dimension 2, the capacity c
0
agrees
with the total area. The construction of c
0
is based on a variational principle for
the action functional of classical mechanics which is bounded neither below nor
above. Critical points can be guaranteed by mini-max arguments. The tools from
the calculus of variations will be developed in detail and from scratch. Applications
of the dynamical capacity c
0
to Hamiltonian vector fields are postponed to Chapter
VIII where it will be used to establish global periodic orbits on and near compact
hypersurfaces of symplectic manifolds.
VII.1 Symplectic capacities and first applications
In the following we denote by SM.2n/ the class of all symplectic manifolds .M; !/
of dimension 2n. This includes compact and non-compact manifolds, manifolds
with boundaries and manifolds without boundaries. Examples are the symplectic
standard space .R
2n
;!
0
/, the manifold .U; !
0
/ where U R
2n
is an open subset,
the manifold .D; !
0
/ where D R
2n
is a domain having smooth boundaries, or
the same subsets of R
2n
equipped with a different symplectic structure defined by
a closed 2-form
!.x/ D
2n
X
i;jD1
a
ij
.x/dx
i
^ dx
j
;
where a
ij
are smooth functions and where !.x/ is for every x a nondegenerate
skew symmetric bilinear form. In matrix notation,
!.x/.u; v/ DhJ.x/u; vi;
VII.1. Symplectic capacities and first applications 253
with a skew symmetric matrix J.x/ DJ.x/
T
satisfying det J.x/ ¤ 0.
Definition. A symplectic capacity is a map
c W SM.2n/ ! Œ0; 1; .M; !/ 7! c.M;!/;
associating with a symplectic manifold of dimension 2n a non-negative real number
or infinity, satisfying the following three axioms.
(A1) Monotonicity. If there exists a symplectic embedding .M; !/ ! .N; / into
a second symplectic manifold of dimension 2n, then
c.M;!/ c.N;/:
(A2) Conformality. For every symplectic manifold .M; !/ and for every real num-
ber ˛ ¤ 0 we have
c.M;˛!/ Dj˛jc.M;!/:
(A3) Normalization. If B.1/ R
2n
is the open unit ball centered at the origin and
if Z.1/ R
2n
is the symplectic open unit cylinder, then
c.B.1/; !
0
/ D D c.Z.1/; !
0
/:
We recall that B.R/ Df.x; y/ 2 R
n
R
n
jjxj
2
Cjyj
2
<R
2
g and Z.r/ D
f.x; y/ 2 R
n
R
n
j x
2
1
C y
2
1
<r
2
g with respect to the symplectic coordinates
.x; y/ D .x
1
;:::;x
n
;y
1
;:::;y
n
/ of the symplectic standard space .R
2n
;!
0
/. The
map ' W .M; !/ ! .N; / is a symplectic embedding, if ' W M ! N is an injective
immersion satisfying '
D !, and if ' W M ! '.M / N is a homeomorphism
onto its image '.M/.
The three axioms (A1)–(A3) do not determine a unique capacity function. The
existence proof of a capacity function is neither trivial nor intuitive. We postpone
it for the moment, and assuming that the existence of a capacity is guaranteed, we
first illustrate the concept and deduce some simple consequences.
Proposition VII.1. A symplectic capacity c is a symplectic invariant which differs
from the volume if n>1.
Proof [Monotonicity]. If ' W .M; !/ ! .N; / is a symplectic diffeomorphism,
then c.M;!/ c.N;/ in view of the monotonicity axiom (A1). Since the inverse
diffeomorphism '
1
W N ! M is also symplectic, the converse inequality holds
also true, so that c.M;!/ D c.N;/. From (A3) it follows that the volume is not a
symplectic capacity if n>1, because vol.Z.1// D1, while the capacity of Z.1/
is finite.
254 Chapter VII. Symplectic invariants
In the special case n D 1, that is, dim M D 2, the total volume is an example
of a symplectic capacity c,
c.M;!/ D
ˇ
ˇ
ˇ
ˇ
Z
M
!
ˇ
ˇ
ˇ
ˇ
; dim M D 2:
If, for instance, U R
2
is an open set or a domain having smooth boundaries, then
c.U;!
0
/ D c.U;dx ^ dy/ Djarea.U /j is its symplectic capacity.
Lemma VII.2. If c is a symplectic capacity, U .R
2n
;!
0
/ an open subset and
¤ 0 a real number, then
c.U;!
0
/ D
2
c.U;!
0
/:
Proof [Conformality]. This is a consequence of the conformality axiom. The dif-
feomorphism
' W U ! U; x 7!
1
x
satisfies '
.
2
!
0
/ D
2
'
!
0
D
2
2
!
0
D !
0
: Therefore
' W .U; !
0
/ ! .U;
2
!
0
/
is a symplectic diffeomorphism, so that
c.U;!
0
/ D c.U;
2
!
0
/ D
2
c.U;!
0
/;
by Proposition VII.1 and axiom (A2).
Proposition VII.3. Let c be symplectic capacity. In the symplectic standard space
.R
2n
;!
0
/ we have, for every r>0,
c.B.r// D r
2
;
c.
B.r// D r
2
;
c.Z.r// D r
2
:
Proof. From Lemma VII.2 and (A3) we conclude
c.B.r// D c.rB.1// D r
2
c.B.1// D r
2
:
Analogously, one verifies that c.Z.r// D r
2
.If">0, then B.r/ B.r/
B.r C "/ and, in view of the monotonicity axiom (A1),
r
2
D c.B.r// c.B.r// c.B.r C "// D .r C "/
2
:
This holds true for every ">0, so that c.
B.r// D r
2
, as claimed.

VII.1. Symplectic capacities and first applications 255
Remark. In R
2
it therefore follows for every symplectic capacity c that
c.B.r// D c.
B.r// D area.B.r//; n D 1:
One can conclude that for every bounded connected domain D .R
2
;!
0
/ with
smooth boundary, the symplectic capacity agrees with the area,
c.D/ D area.D/:
For a proof we refer to [52].
Proposition VII.4. If ;¤U .R
2n
;!
0
/ is an open and bounded subset, then
0<c.U/<1
for every symplectic capacity c.
Proof. The set U contains a small open ball B
x
0
.r/ around a point x
0
2 U and
is contained in a large open ball B.R/ centered at 0. Since the translation in R
2n
is a symplectic diffeomorphism, we have c.B
x
0
.r// D c.B.r// and conclude the
estimates
0<r
2
c.U/ R
2
< 1
from the inclusions B
x
0
.r/ U B.R/, using the monotonicity axiom.
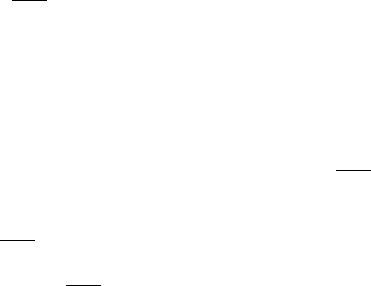
Examples. (1) If U .R
2n
;!
0
/ is an open set satisfying
B.r/ U Z.r/;
one concludes by the monotonicity and Proposition VII.3 for every symplectic
capacity c, that c.U / D r
2
– regardless of the volume, the geometrical properties
and the topological properties of U !
(2) Ellipsoid. We consider the ellipsoid E in .R
2n
;!
0
/ which is the set
E Dfz j q.z/<1gR
2n
with the quadratic function q W R
2n
! R defined by
q.z/ D
n
X
j D1
x
2
j
C y
2
j
r
2
j
;zD .x
1
;:::;x
n
;y
1
;:::;y
n
/ 2 R
2n
where the constants r
j
D r
j
.E/>0are ordered according to 0<r
1
.E/
r
n
.E/. Then B.r
1
/ E Z.r
1
/ and using the monotonicity one concludes that
the capacity of the ellipsoid is equal to c.E; !
0
/ D r
1
.E/
2
.
In view of their monotonicity properties the symplectic invariants c.M;!/ rep-
resent in particular obstructions to symplectic embeddings. For example, an imme-
diate consequence of the axioms is M. Gromov’s non-squeezing theorem.
256 Chapter VII. Symplectic invariants
r
U
Z.r/
Figure VII.1. Illustration of example (1).
Theorem VII.5 (Gromov’s non-squeezing theorem, 1985). In the symplectic stan-
dard space .R
2n
;!
0
/ there exists a symplectic embedding
' W B.R/ ! Z.r/
if and only if r R.
Proof [Monotonicity and normalization]. If r R, then the inclusion map
B.R/ ,! Z.r/ is a symplectic embedding. Conversely, if ' W B.R/ ! Z.r/
is a symplectic embedding and if c is a symplectic capacity (whose existence
will be proved later), then the monotonicity and Proposition VII.3 lead to R
2
D
c.B.R// c.Z.r// D r
2
, so that r R, as claimed in the theorem.
In view of the monotonicity and the example above the following statement is
obvious.
Theorem VII.6. Let E and F be two ellipsoids in .R
2n
;!
0
/. If there exists a
symplectic embedding ' W E ! F , then r
1
.E/ r
1
.F /.
Theorem VII.7. In .R
2
;!
0
/ .R
2
;!
0
/ there exists a symplectic diffeomorphism
' W B.r
1
/ B.r
2
/ ! B.s
1
/ B.s
2
/
between products of open 2-discs satisfying r
1
r
2
and s
1
s
2
, if and only if
r
1
D s
1
and r
2
D s
2
.
Proof. We denote by B
m
.r/ the open ball in R
m
centered at the origin. If ' is the
symplectic diffeomorphism of the theorem, we consider the following composition
VII.1. Symplectic capacities and first applications 257
of mappings:
B
4
.r
1
/
i
! B
2
.r
1
/ B
2
.r
2
/
'
! B
2
.s
1
/ B
2
.s
2
/
j
! B
2
.s
1
/ R
2
D Z.s
1
/;
where i and j are the inclusion mappings. The composition j B ' B i W B
4
.r
1
/ !
Z.s
1
/ is a symplectic embedding so that s
1
r
1
in view of Theorem VII.5. The
same argument applied to the inverse map '
1
leads to r
1
s
1
, so that r
1
D s
1
.
Because ' is volume preserving, it follows that r
2
D s
2
, as claimed.
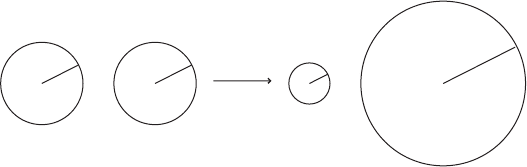
1
1
r
1=r
Figure VII.2. In view of Theorem VII.7 such a symplectic embedding is not possible.
The previous theorem shows clearly that volume preserving diffeomorphisms
behave completely differently from symplectic diffeomorphisms. For every r>0
there exists a (linear) volume preserving diffeomorphism
B.1/ B.1/ ! B.r/ B.1=r/:
The volume vol.B.r/ B.1=r// D
2
is independent of r. In contrast, the sym-
plectic capacity function satisfies c
B.r/ B.1=r/
D r
2
! 0 as r ! 0.
We have already seen above that every open ball B.R/ can be symplectically
embedded into the isotropic cylinder Z
iso
.r/ Dfz 2 R
2n
j x
2
1
C x
2
2
<r
2
g
.R
2n
;!
0
/. As a consequence its capacity is easily computed.
Proposition VII.8. c.Z
iso
.r/; !
0
/ D1for every r>0and for every symplectic
capacity c.
Proof [Monotonicity]. Take the symplectic diffeomorphism '.x; y/ D ."x; "
1
y/
for .x; y/ 2 R
n
R
n
where ">0.IfR>0, then for " sufficiently small
' W B.R/ ! Z
iso
.r/
is a symplectic embedding and hence, in view of the monotonicity property of the
capacity,
R
2
D c.B.R// c.Z
iso
.r//:
This holds true for every R>0and so c.Z
iso
.r// D1, as claimed.
258 Chapter VII. Symplectic invariants
If one symplectic capacity has been found, it is easy to construct new ones.
One example is the Gromov width G.M; !/ of a symplectic manifold which will
be introduced next.
We consider the symplectic manifold .M; !/ of dimension 2n. Given an open
subset U M there exists in view of Darboux’s theorem a symplectic embedding
' W .B.r/; !
0
/ ! .U; !/;
of an open ball in R
2n
having a sufficiently small radius r>0. We now look for
the largest open ball that can be symplectically embedded into the given manifold.
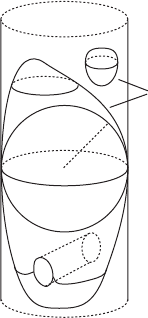
Definition. The Gromov width G.M; !/ is defined as
G.M; !/Dsupfr
2
j there exists a symplectic embedding .B.r/; !
0
/ !.M; !/g:
'
M
r
Figure VII.3. Embedding of the open ball B.r/, illustrating the definition of the Gromov
width.
Theorem VII.9. The Gromov width G.M; !/ is a symplectic capacity. It satisfies
G.M; !/ c.M;!/
for every capacity c and every symplectic manifold .M; !/.
Proof [Gromov]. We shall verify that the function G satisfies the axioms (A1)–(A3)
of a capacity function.
(A1) Let W .M; !/ ! .N; / be a symplectic embedding. For every symplec-
tic embedding ' W B.r/ ! M into M the composition
B ' W B.r/ ! N
is a symplectic embedding into M . In view of the definition of the function G it
therefore follows that G.N; / G.M; !/ and hence the axiom (A1) is verified.
(A2) Let 0 ¤ ˛ 2 R. We show that to every symplectic embedding
' W .B.r/; !
0
/ ! .M; ˛!/

VII.1. Symplectic capacities and first applications 259
there belongs a symplectic embedding
O' W
B
r
p
j˛j
;!
0
! .M; !/
and conversely. Then the property G.M; ˛!/ Dj˛jG.M; !/ of axiom (A2) fol-
lows.
If ' W .B.r/; !
0
/ ! .M; ˛!/ is a symplectic embedding, then '
.˛!/ D
˛'
! D !
0
and so
'
! D
1
˛
!
0
:
Abbreviating ı D
r
p
j˛j
, the map
W .B.ı/; !
0
/ !
B.r/;
1
˛
!
0
; .x/ ´
p
j˛jx
satisfies
1
˛
!
0
D
1
˛
!
0
D
p
j˛j
2
˛
!
0
D sign.˛/ !
0
:
If sign.˛/ DC1, the composition
O' D ' B W .B.ı/; !
0
/ ! .M; !/
is a symplectic embedding, because
O'
! D
B '
! D
1
˛
!
0
D sign.˛/!
0
D !
0
:
If sign.˛/ D1, we take the symplectic diffeomorphism
0
W .B.ı/; !
0
/ ! .B.ı/; !
0
/
defined by
0
.x; y/ D .x; y/ for .x; y/ 2 R
n
R
n
, so that the composition
O' D ' B B
0
W .B.ı/; !
0
/ ! .M; !/
is a symplectic embedding as we wanted to show.
(A3) In order to confirm the normalization axiom, we first verify that
G.B.1/; !
0
/ D .If' W B.r/ ! B.1/ is a symplectic embedding, it follows
from the volume preservation that r 1 and hence G.B.1// . Since the
inclusion map B.1/ ,! B.1/ is a symplectic embedding, G.B.1// D ,aswe
wanted to show. It remains to prove that G.Z.1/; !
0
/ D .If' W B.r/ ! Z.1/ is
a symplectic embedding, then, in view of the non-squeezing theorem, r 1 (here
we have made use of the existence of a capacity!) and hence G.Z.1/; !
0
/ .
The equality follows from the inclusion mapping. So far we have verified that the
260 Chapter VII. Symplectic invariants
Gromov width G is a symplectic capacity function and it remains to prove that it is
the smallest capacity.
Take any symplectic capacity function c and let ' W B.r/ ! M be a symplectic
embedding. Then, by the monotonicity property and Proposition VII.3,
r
2
D c.B.r/; !
0
/ c.M;!/:
This holds true for all the symplectic embeddings ' W B.r/ ! M and hence also for
the supremum. Consequently, G.M; !/ c.M;!/ and Theorem VII.9 is proved.
In the following sections we shall establish the existence of a capacity function.
We shall construct a very distinguished symplectic capacity c
0
related to the dy-
namics of Hamiltonian systems and introduced in 1990 by H. Hofer and E. Zehnder
[51]. This dynamical capacity measures the minimal oscillation of special Hamil-
tonian functions needed to conclude the existence of a distinguished fast periodic
solution of the associated Hamiltonian vector field. In dimension 2 it agrees with
the total area. The construction is based on a variational principle for the classical
action functional of mechanics for periodic solutions of Hamiltonian equations.
VII.2 The Hofer–Zehnder capacity c
0
We recall that if .M; !/ is a symplectic manifold, then the smooth function H W M !
R determines the Hamiltonian vector field X
H
on M by the requirement that
!.X
H
.x/; v/ DdH.x/v for all tangent vectors v 2 T
x
M .Aperiodic solu-
tion x.t/ of X
H
having period T is a solution of the equation
Px.t/ D X
H
.x.t//; t 2 R;
satisfying x.0/ D x.T /. Consequently, x.t C T/ D x.t/ for all t 2 R.Wenext
introduce a distinguished class of Hamiltonian functions.
Definition. If .M; !/ is a symplectic manifold we denote by H.M; !/ the set of
smooth functions H W M ! R having the following properties.
There exist an open set U M and a compact set K M (these sets depend
on H ) satisfying U K M n@M and
(i) H j
U
0 is constant,
(ii) H j
M nK
m.H / is constant,
(iii) 0 H.x/ m.H / for all x 2 M .
The constant m.H / D max H min H is the oscillation of the function H .A
function H 2 H.M; !/ is called admissible, if the associated Hamiltonian equation
Px D X
H
.x/ does not admit a non-constant periodic solution of period 0<T 1,
so that a periodic solution is either