Zehnder E. Lectures on Dynamical Systems: Hamiltonian Vector Fields and Symplectic Capacities
Подождите немного. Документ загружается.

V.10. Integrable systems, action–angle variables 231
(3) We return to our chosen point p 2 N
0
and to the Liouville chart .W; /
of Lemma V.42, where maps the open neighborhood W of p onto the open
neighborhood V of 0 2 R
2n
and satisfies .p/ D 0. To extend the inverse map
1
W V ! W , we introduce the map
# W R
n
D
2
! M; #.x; y/ ´ '
x
B
1
.0; y/;
where D
2
is a small neighborhood of 0 2 R
n
and '
x
for x 2 R
n
is, as in the
first step, the flow of the Hamiltonian vector fields X
F
j
.Ify D 0, we obtain
#.x;0/ D '
x
.p/ and the flow does exist for all x 2 R
n
, as we have already seen.
We shall show that also for small y 2 D
2
the map #.x;y/is defined for all x 2 R
n
.
In view of Corollary V.43,
#.x;y/ D
1
.x; y/;
for small x 2 R
n
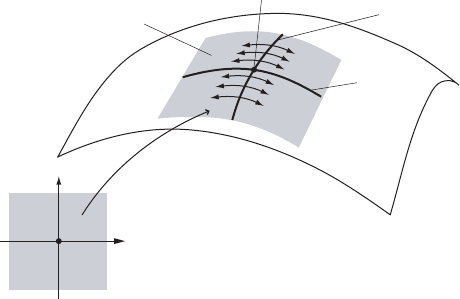
. Geometrically we apply the flow maps '
x
to the section S D
f
1
.0; y/ 2 M j y 2 D
2
g which, in view of Corollary V.43 is transversal to the
vector fields X
F
j
:
0
p
x
y
1
S D
1
.0; D
2
/
N
0
M
'
x
#..1; 1/ D
2
/
Figure V.3. The geometrical meaning of the map #, flowing out from the transversal section
S of N
0
.
From the invariance F B '
x
D F we conclude by means of Lemma V.42 that
F.#.x;y// D F.'
x
B
1
.0; y// D F.
1
.0; y// D y;
so that on its domain of definition the map # satisfies
# W R
n
fyg!N
y
D F
1
.y/

232 Chapter V. Hamiltonian vector fields and symplectic diffeomorphisms
for y 2 D
2
. In the special case y D 0 the map #.x;0/ D '
x
.p/ is, due to step (1),
defined for all x 2 R
n
and maps R
n
f0g onto the submanifolds N
0
D F
1
.0/.
From this it follows for D
2
sufficiently small that the map # is defined on K D
2
,
where K R
n
is a compact set containing the generators
j
2 of the lattice.
We show that # is defined on R
n
D
2
.Ify D 0, then #.x C ; 0/ D #.x;0/
for all x 2 R
n
and all 2 . We construct for y in a small neighborhood of
0 an n-dimensional lattice .y/ R
n
which is close to .0/ D and satisfies
#
x C .y/;y
D #.x;y/ for all x 2 R
n
and for all .y/ 2 .y/.
If D
j
2 is a generator of the lattice, then '
.p/ D p and .p/ D 0.In
the Liouville chart V R
2n
the map
./ B '
B
1
W .x; y/ 7! .; /
is a local symplectic diffeomorphism near the fixed point 0 in R
2n
.
Lemma V.44. The symplectic map ./ has the form
D x v.y/; v.y/ D
@
@y
Q.y/; D y
for a smooth real-valued function Q which satisfies Q.0/ D 0. Moreover, v.0/ D 0.
Proof. By definition '
B
1
.x; y/ D
1
.; / and from F B'
x
D F it follows
using Lemma V.42 that
y D F B
1
.x; y/ D F B '
B
1
.x; y/ D F B
1
.; / D :
In Section V.9. we have seen that every symplectic map which extends the relation
D y is necessarily of the desired form. The statement v.0/ D 0 follows from
B '
B
1
.0/ D 0, and the lemma is proved.
By definition, '
B
1
.x; y/ D
1
.; /, and hence in view of Lemma V.44
and Corollary V.43,
./
1
.x; y/ D '
Cv.y/
B
1
.x; y/
for .x; y/ 2 V
0
V . Carrying out this construction for every generator
j
of we
obtain the maps v
j
.y/ D
@
@y
Q
j
.y/, which satisfy the identity ./ with
j
Cv
j
.y/
replacing C v.y/. Defining
j
.y/ D
j
C v
j
.y/, we therefore introduce the
lattice .y/ R
n
as
.y/ D
˚
.y/ D
P
n
j D1
n
j
j
.y/ j n
j
2 Z
:
In view of Lemma V.44,
j
.y/ D
j
C v
j
.y/ D
@
@y
W
j
.y/;
V.10. Integrable systems, action–angle variables 233
with the real-valued functions W
j
.y/ D Q
j
.y/ Chy;
j
i satisfying W
j
.0/ D 0 for
all 1 j n. From v
j
.0/ D 0 we deduce
j
.0/ D
j
and so
.0/ D
if y D 0. We conclude for small y that the lattice vectors
j
.y/ are linearly
independent and satisfy, due to ./, the equations
.]/
1
.x; y/ D '
j
.y/
B
1
.x; y/
for all .x; y/ 2 V
0
V and for all 1 j n.
Lemma V.45. The map #.x;y/ D '
x
B
1
.0; y/ is defined on R
n
D
2
and
satisfies
(i) #
! D !
0
,
(ii) #
x C .y/;y
D #.x;y/ for all .y/ 2 .y/ and all .x; y/ 2 R
n
D
2
.
Proof. The map # is defined for .x; y/ 2 K D
2
where K R
n
is a compact set
containing the generators of D .0/ in its interior, if D
2
R
n
is a sufficiently
small neighborhood of 0 2 R
n
. For small x we find in view of the identity .]/,
#.x C
j
.y/; y/ D '
xC
j
.y/
B
1
.0; y/
D '
x
B '
j
.y/
B
1
.0; y/
D '
x
B
1
.0; y/
D #.x;y/
for every generator
j
.y/ of . Therefore, we can indeed continue the flow x 7!
#.x;y/ D '
x
B
1
.0; y/ to all x 2 R
n
and it remains to prove that #
! D !
0
.If
.x; y/ 2 R
n
D
2
, we choose x
0
2 R
n
near x such that .x x
0
;y/lies in V . This
way we can represent # locally as a composition of symplectic maps, since in view
of Corollary V.43 we obtain
#.x;y/ D '
x
0
C.xx
0
/
B
1
.0; y/
D '
x
0
B
1
.x x
0
;y/
D '
x
0
B
1
B
x
0
.x; y/;
with the translation
x
0
.x; y/ D .x x
0
;y/in R
2n
. As a composition of symplectic
maps, the map # is symplectic and the lemma is proved.
We have already seen that #.R
n
fyg/ F
1
.y/. Next we show that # induces
a diffeomorphism
# W R
n
=.y/ ! #.R
n
fyg/ F
1
.y/
234 Chapter V. Hamiltonian vector fields and symplectic diffeomorphisms
for every small y 2 D
2
. It then follows in particular that the image is diffeomorphic
to the torus T
n
. Since #.;y/is a local diffeomorphism, it only remains to show that
# is injective, so that .y/ is indeed the isotropy group of #.;y/. By construction
the lattice .y/ is n-dimensional and we have to show that the periods
j
.y/ are
in fact minimal. Arguing by contradiction we assume that there exist bounded
sequences .x
j
;y
j
/ and .x
0
j
;y
j
/ satisfying y
j
! 0 and having the properties
#.x
j
;y
j
/ D #.x
0
j
;y
j
/ and x
j
x
0
j
… .y
j
/:
Going over to subsequences we may assume that x
j
! x
and x
0
j
! y
so that
#.x
;0/D #.y
;0/and hence x
y
2 .0/ D . Therefore x
j
x
0
j
is near a
lattice point in .y
j
/. Since the lattice is discrete, x
j
x
0
j
2 .y
j
/ must hold true
for large j , in contradiction to the assumption. Consequently, we do, indeed, have
a diffeomorphism R
n
=.y/ ! #.R
n
fyg/.
(4) Finally, we normalize all lattices .y/to Z
n
by a symplectic diffeomorphism
W R
n
D
1
! R
n
D
2
;.;/7! .x; y/:
The lattice .y/ is generated by the lattice vectors
j
.y/ D
j
C v
j
.y/ D
@
@y
W
j
.y/:
The diffeomorphism should satisfy
.Z
n
fg/ D .y/ fyg;D .y/
where we still have to define the diffeomorphism . We define the map implicitly
by means of the generating function
S.;y/ D
n
X
j D1
j
W
j
.y/;
so that
j
D
@
@
j
S.;y/ D W
j
.y/ and x
j
D
@
@y
j
S.;y/ D
n
X
sD1
s
@
@y
j
W
s
.y/:
The first line defines the map D .y/ D .W
1
.y/;:::;W
n
.y//. It is a local
diffeomorphism in the neighborhood of 0 D .0/, in the statement of the theorem
denoted by W D
2
! D
1
. This follows because the Jacobi matrix of is equal to
d.y/ D
1
.y/;:::;
n
.y/

V.10. Integrable systems, action–angle variables 235
and the column vectors
j
.y/ are linearly independent. Since the matrix S
y
.; y/
is equal to d.y/ and therefore is invertible for all if y is small, the function S
generates a symplectic map W R
n
D
1
! R
n
D
2
. It satisfies
.e
j
;/D .
j
.y/; y/; D .y/:
Hence .Z
n
fg/ D .y/ fyg for D .y/ as desired. The composition
ˆ D # B W .R
n
D
1
;!
0
/ ! .M; !/
is symplectic, satisfies ˆ. Cj; / D ˆ.; / for all j 2 Z
n
, and therefore induces
a symplectic diffeomorphism
ˆW R
n
=Z
n
D
1
! U M
onto an open neighborhood of N
0
. The map ˆ defines the desired action- angle
variables .; / 2 T
n
D
1
. Indeed, ˆ.T
n
fg/ D F
1
.y/ \U where D .y/
and
B F B ˆ.; / D B F B # B .;/
D B F B #.x;y/
D B F B '
x
B
1
.0; y/
D B F B
1
.0; y/
D .y/
D :
This completes the proof of the theorem of Arnold and Jost.
Outlook. Integrable systems are extremely rare and therefore attract special atten-
tion and we refer to J. Moser’s lecture [72] given at the ICM 1998 in Berlin. On the
other hand, there are many systems in nature, which are not integrable, but which
are near an integrable system. The most prominent is our planetary system. We
therefore wonder how such an integrable system behaves under perturbation. We
recall that an integrable system X
h
on the phase space T
n
D of the angle and
action variables .x; y/ can be solved immediately. The Hamiltonian function h.y/
depends only on the action variable y 2 D, so that the flow leaves every single torus
T
n
fyg invariant. On the torus the flow is the Kronecker flow x 7! x C t!.y/,
where !.y/ D
@
@y
h.y/ 2 R
n
are the frequencies associated with the torus T
n
fyg.
If the frequencies !.y/ D .!
1
;:::;!
n
/ are rationally independent or, more
explicitly, if h!;ji…Z for all j 2 Z
n
nf0g, then every orbit on this torus is
dense, in view of the proposition by Kronecker (Corollary I.7). Otherwise, there
exist non-trivial relations of the form h!;ji2Z for integer vectors j 2 Z nf0g,
so-called resonance conditions. In this case, the closure of every orbit lies densely

236 Chapter V. Hamiltonian vector fields and symplectic diffeomorphisms
in a torus of lower dimension. If there exist n1 independent resonance conditions,
then every orbit is periodic on the corresponding torus. In the nondegenerate case
defined by the condition
det
@
@y
!.y/ D det
@
2
@y
2
h.y/ ¤ 0; y 2 D
the frequencies !.y/ actually do depend on the action variables y and all the differ-
ent types of tori are mixed together. It turns out that these tori T
n
fyg, depending
on their frequency vectors !.y/, react completely differently to a Hamiltonian per-
turbation H of h of the form
H.x;y/ D h.y/ C h
1
.x; y/;
where the perturbation term h
1
is small and periodic in the angle variable, so that
h
1
.x Cj; y/ D h
1
.x; y/ for all integer vectors j 2 Z. As an example we consider
an irrational torus T
n
fyg, whose frequency vector is strongly irrational in the
sense that it satisfies the Diophantine inequalities
jh!.y/; j ij jj j
for all j 2 Z
n
nf0g, with two constants >0and >n 1. One can prove that
such a torus survives under the perturbation h
1
as an invariant parametrized torus,
on which the flow is conjugated to the unperturbed flow, if only the perturbation h
1
is sufficiently small and sufficiently smooth. Therefore, the torus is only slightly
deformed. For this purpose, one constructs an embedding
' W T
n
fyg!T
n
D
of the unperturbed torus into the phase space, which is in the neighborhood of the
inclusion map of the torus and solves the partial differential equation
d'.x/! D J rH.'.x// for all x 2 T
n
where ! D !.y/ are the frequencies of the unperturbed system,
Such an embedding ' maps the solution .t/ D Ct! on the unperturbed torus
T
n
fyg onto the solution x.t/ ´ '..t// on the perturbed torus '.T
n
fyg/,
since using the above partial differential equation,
Px.t/ D d'..t//
P
.t/
D d'..t // !
D J rH.'..t///
D J rH.x.t//:
V.10. Integrable systems, action–angle variables 237
The partial differential equation is an analytically very subtle boundary value prob-
lem for periodic boundary condition. Solutions can be constructed by means of
powerful iteration methods, called KAM theory. The acronym KAM stands for
Kolmogorov–Arnold–Moser. The KAM theory guarantees not only one, but an
abundance of such invariant tori for the vector field X
H
, under suitable conditions
on the smoothness of H and the smallness of the perturbation h
1
. The set of all
these invariant tori form a set of positive Lebesgue measure in T
n
D which, how-
ever, is nowhere dense in T
n
D, so that the complement of this set of stable orbits
for n 3 is connected. It immediately follows that perturbed integrable systems
cannot be ergodic, as the famous physicist E. Fermi has claimed. So far, the system
still looks like an integrable system, at least as far as the measure is concerned.
However, in the complement of the set of invariant KAM tori something com-
pletely different happens under the perturbation. Here the invariants and stability
properties break down and unstable phenomena show up generically. They can
give rise to a slow so-called Arnold diffusion through the phase space and even to
escaping solutions.
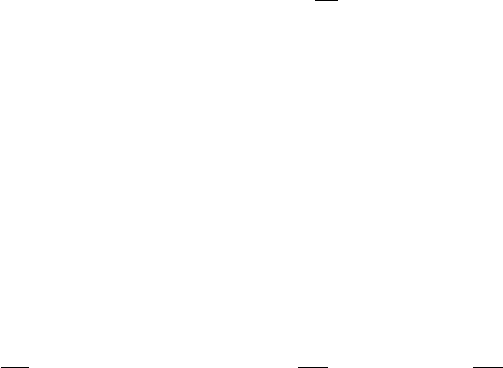
That in the Hamiltonian systems near integrable systems stable and unstable
orbits coexist and cannot be separated from each other is best illustrated by the
celebrated sketch due to V. I. Arnold and A. Avez in their book [8]. It demonstrates
vividly the complexity of the orbit structure of a smooth nonlinear area preserving
diffeomorphism ' near an elliptic fixed point in the plane R
2
. As explained in
Section VIII.5 such a map arises, for example, as a transversal section map of a
stable periodic orbit on the 3-dimensional energy surface of a Hamiltonian system.
Instead of studying nearby solutions for all times one can, just as well, study all the
iterates of the section map.
The elliptic fixed point 0 at the center of Figure V.4 is surrounded by smooth
closed curves which are close to circles and which are invariant under the map '.
Their existence was established by J. Moser, 1962, in [70]. For a recent proof in
the analytic case we point out [62] by M. Levi and J. Moser. On every invariant
curve the map is conjugated to the rigid rotation of a circle by an irrational rotation
which depends on the curve. These invariant curves represent the stable part of
the map ' and fill out a Cantor set of relatively large measure and reflect the fact
that in a neighborhood of the elliptic fixed point the map ' is close to an integrable
map. One concludes, in particular, that the fixed point is topologically stable.
However, between these invariant curves one sees generically orbits of elliptic and
hyperbolic periodic points. Taking a closer look, one discovers that the stable and
unstable invariant manifolds issuing from the hyperbolic periodic points intersect
transversally in homoclinic points. Recalling the discussion in Chapter III, the
homoclinic points give rise to invariant hyperbolic sets for higher iterates of the
map ', near which the unstable and unpredictable orbit structure is described by
means of topological Bernoulli systems. The elliptic fixed point is a cluster point
of homoclinic points. The picture is repeated near the elliptic periodic orbits for
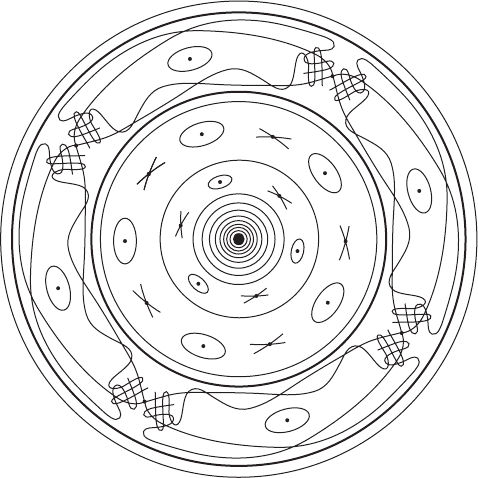
238 Chapter V. Hamiltonian vector fields and symplectic diffeomorphisms
Figure V.4. The sketch of Arnold and Avez, after [8].
higher iterates of the map ', and so on. The existence of the homoclinic orbits in
the picture was established in 1973 by E. Zehnder in[120]. A modern version is due
to C. Genecand [39]; further references are A. Chenciner [17] and J. Moser [73].
Literature. The monographs [2] by R. Abraham and J. Marsden, [45] by C. God-
billon, [66] by K. Meyer and G. Hall, [107] by C. L. Siegel and J. Moser and
[73] by Moser are classics in Hamiltonian mechanics and present also some of
the interesting history of the topics. Examples of integrable systems and applica-
tions to celestial mechanics are contained in the lecture notes [74] by J. Moser and
E. Zehnder. An efficient introduction into the Hamiltonian formalism on symplec-
tic manifolds is in Chapter 3 of [30] by J. J. Duistermaat. The monograph [65]by
D. McDuff and D. Salamon goes beyond the formalism and introduces symplectic
topology. Introductions into the KAM theory containing the references to the old
masters are the lectures [61]byR.delaLlaveand[86] by J. Pöschel and the paper
[97] by D. Salamon. The KAM theory in the configuration space is treated in [98]
by D. Salamon and E. Zehnder.
Chapter VI
Questions, phenomena, results
So far we have introduced the concepts of symplectic manifolds and symplectic
diffeomorphisms and have presented the Hamiltonian formalism which was used
and taught in physics and mathematics over centuries. We now turn to more recent
developments which are at the beginning of the new field of symplectic topology. In
the present, very short, Chapter VI we shall raise some questions and present some
phenomena and results, in order to motivate the detailed construction of symplectic
invariants later on in Chapter VII.
VI.1 Geometric questions
We consider two compact domains K
1
and K
2
in R
m
which possess smooth bound-
aries and which are diffeomorphic by an orientation preserving diffeomorphism
uW K
1
! K
2
. We look for conditions on these two domains which allow us to con-
clude that there exists a diffeomorphism W K
1
! K
2
that is volume preserving
and hence satisfies det d .x/ D 1 for all x 2 K
1
, or equivalently,
D where D dx
1
^^dx
m
is the volume form on R
m
. In order to derive necessary conditions we assume that
W K
1
! K
2
is a volume preserving diffeomorphism. Then it follows from the
variable transformation formula for every integrable function f W K
2
! R that
Z
K
1
f . .x// dx D
Z
K
1
f . .x// jdet d .x/jdx D
Z
K
2
D .K
1
/
f.x/ dx:
If f D
K
2
is the characteristic function of the domain K
2
, then f B D
K
1
and
we obtain
vol.K
1
/ D vol.K
2
/
so that the domains must have the same volume. We see that the total volume is an
invariant of volume preserving diffeomorphisms. It turns out that this condition is
also sufficient, as the following statement shows.
Theorem VI.1 (Dacorogna–Moser, 1990). If K
1
and K
2
are two compact domains
in R
m
which possess smooth boundaries, are diffeomorphic and have the same
volume, vol.K
1
/ D vol.K
2
/, then there exists a volume preserving diffeomorphism
W K
1
! K
2
, hence satisfying
D .

240 Chapter VI. Questions, phenomena, results
For the proof of a more general theorem with precise regularity conditions we
refer to Dacorogna and Moser [25]. That the total volume is the only invariant of
volume preserving diffeomorphisms is also demonstrated by the following result
for compact manifolds without boundaries.
Theorem VI.2 (Moser). If M is an oriented, compact and connected manifold
(without boundary) and if
0
and
1
are two volume forms on M having the same
total volume such that
Z
M
0
D
Z
M
1
;
then there exists a volume preserving diffeomorphism u of M such that
0
D u
1
:
In other words, the only invariant of volume forms is their total volume.
Proof. We proceed as in the proof of Darboux’s theorem and deform the volume
form
0
into
1
defining
t
D .1 t/
0
C t
1
;0 t 1:
These forms are volume forms since locally
0
and
1
are represented by
0
.x/ D
a.x/dx
1
^^dx
m
and
1
.x/ D b.x/dx
1
^^dx
m
with non-vanishing smooth
functions a and b which, by the assumption on the total volume, must have the same
sign. We shall construct a family '
t
of diffeomorphisms satisfying
./.'
t
/
t
D
0
;'
0
D Id
for 0 t 1, so that the diffeomorphism u D '
1
will solve our problem. Since
M is compact, connected and oriented we conclude from
R
M
.
1
0
/ D 0 that
1
0
D d
for some .m 1/-form on M . This is a special case of the de Rham theorem.
Since
t
are volume forms, we find a unique time dependent vector field X
t
on M
solving the linear equation
i
X
t
t
D
for 0 t 1. Denote by '
t
the flow of the vector field X
t
satisfying '
0
D Id.
Since d˛
t
D 0 for volume forms we find, again using Cartan’s formula,
d
dt
Œ.'
t
/
˛
t
D .'
t
/
L
X
t
˛
t
C
d
dt
˛
t
D .'
t
/
Œd.i
X
t
˛
t
/ C
1
0
which vanishes, because d.i
X
t
˛
t
/ C
1
0
D d.i
X
t
˛
t
C/ D 0 by our choice
of the vector field X
t
. Therefore, ./ holds true and the proof is finished.