Zdunkowski W., Bott A. Dynamics of the atmosphere: A course in theoretical meteorology
Подождите немного. Документ загружается.

25.2 Application of difference quotients 641
Using c = c
r
+ ic
i
and the relation sin x = [exp(ix) − exp(−ix)]/(2i), we find
exp(kc
i
t) exp(−ikc
r
t) −1 +
iU t
x
sin(kx) = 0(25.31)
Application of Euler’s formula permits us to separate the real and imaginary parts,
i.e.
(a) Real part: exp(kc
i
t)cos(kc
r
t) = 1
(b) Imaginary part: exp(kc
i
t)sin(kc
r
t) =
Ut
x
sin(kx)
(25.32)
Squaring (25.32a) and (25.32b) and adding the results gives
exp(2kc
i
t) = 1 +
Ut
x
2
sin
2
(kx)(25.33)
Solving for c
i
results in
c
i
=
1
2kt
ln
1 +
Ut
x
2
sin
2
(kx)
> 0(25.34)
Dividing the imaginary part in (25.32) by the real part gives the real part of the
phase speed:
c
r
=
1
kt
arctan
Ut
x
sin(kx)
≈ U (25.35)
for sufficiently small t and x, see equation (25.11). By substituting the complex
phase velocity (25.34) and (25.35) into the trial solution (25.6a) we find
ψ
n
j
= A exp[ik(jx− c
r
nt)] exp(c
i
nt)(25.36)
Inspection shows that the numerical solution to the difference equation (25.29)
approaches infinity with increasing time since c
i
> 0. This means that the numerical
solution is absolutely unstable.
In conclusion we will investigate the behavior of c
i
as the time step approaches
zero. From (25.34) it follows that
c
i
=
1
2kt
ln[1 + B(t)
2
] =⇒ lim
t→ 0
c
i
= 0
(25.37)
with B>0. This means that, for a very small first time step, the solution (25.36)
to the difference equation (25.29) is sufficiently accurate.
642 An excursion concerning numerical procedures
25.3 A practical method for the elimination of the weak instability
The combination of the results of the previous sections leads to a practical compu-
tational method, which will be outlined now. For the first-order partial differential
equation (25.1) a unique solution is guaranteed whenever the variable ψ is speci-
fied at t = 0. The corresponding difference equation (25.5), however, requires an
arbitrary specification of the variable ψ not only at time t = t
0
= 0 but also at
t = t
1
= t. The initial data for the two times t
0
and t
1
are not harmonized in
any way by the difference equation. This freedom in the choice of the initial data
resulted in the weak instability.
The application of the forward-in-time difference scheme (25.29), in agreement
with the differential equation, requires specification of the variable only for the
time t = 0. The weak instability does not occur in this case, but the numerical
scheme is unstable. Thus we apply equation (25.29) only for the very first time
step.
This suggests that we should use a combination of these two procedures, as will
be explained now. The numerical calculations are started by applying the forward-
in-time difference method for a fraction, say t
=
1
8
t, of the regular time step
t. In this way we calculate with a high degree of stability, without the presence
of the numerical wave, the variable ψ at the time t = t/8. In the second step
the normal solution scheme is applied, using the centered difference quotients with
t
=
1
8
t. In the third step one doubles the time step, i.e. t
=
1
4
t, thereby
always starting from n = 0. In the next step we use t
=
1
2
t until, in the
fifth step with t
= t,thevalueofψ at time step n = 2 is obtained. The
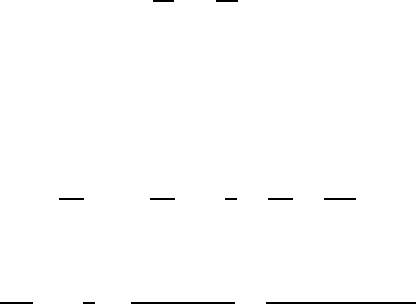
procedure, which is also known as the leap-frog method, is shown schematically
in Figure 25.3. By means of this successive initialization the phenomenon of the
weak instability is suppressed very efficiently. Much more could be said about this
and other calculation procedures, but we have given sufficient evidence that great
care must be taken in applying finite-difference schemes. Later we will discuss an
entirely different instability, which is associated with the numerical treatment of
the nonlinear advection equation.
25.4 The implicit method
It is possible to give a numerical scheme for the solution of (25.1) that is abso-
lutely stable. In this case we proceed as follows. Time and spatial derivatives are
discretized by
∂ψ
∂t
=
ψ
n+1
j
− ψ
n
j
t
∂ψ
∂x
=
1
2
ψ
n+1
j+1
− ψ
n+1
j−1
2 x
+
ψ
n
j+1
− ψ
n
j−1
2 x
(25.38)
25.4 The implicit method 643
n = 1
1
2
1
4
1
8
forward
n = 2
2 ∆t
Fig. 25.3 The leap-frog method.
The partial derivative with respect to time is discretized by a forward-in-time
difference quotient while the partial spatial derivative is expressed by a mean value
in time. Therefore, the discretized form of equation (25.1) is given by
ψ
n+1
j
− ψ
n
j
+
Ut
4 x
ψ
n+1
j+1
− ψ
n+1
j−1
+ ψ
n
j+1
− ψ
n
j−1
= 0(25.39)
In contrast to the methods which we have discussed so far, the required grid function
at n + 1 now appears at three different places and cannot be determined explicitly
as before. Therefore, this difference method is called the implicit scheme.Inorder
to find the solution of the advection problem, (25.39) must be written down for
all grid points j , including the boundary points j = 0andj = J . This leads to
a band matrix that can be solved by known methods for the required values ψ
n+1
j
with j = 1, 2,...,J − 1. We will not describe the numerical procedure, but the
numerical effort by far exceeds the computational labor of the explicit schemes.
This is the price to be paid for the stability of the numerical method.
In order to prove the stability of the scheme, we introduce the trial solution
(25.6a) into (25.39) and obtain
exp(−ikc t) − 1 +
Ut
4 x
[exp(ik x) − exp(−ik x)][exp(−ikc t) + 1] = 0
(25.40)
644 An excursion concerning numerical procedures
Dividing this equation by the expression within the second set of brackets gives
exp(−ikc t) − 1
exp(−ikc t) + 1
+
Ut
4 x
[exp(ik x) − exp(−ik x)] = 0(25.41)
On multiplying the numerator and denominator of the first term by exp(ikc t/2)
and using well-known trigonometric relations we obtain without difficulty the
frequency equation
−i tan
kc t
2
+ i
Ut
2 x
sin(kx) = 0(25.42)
The required expression for the phase velocity follows immediately:
c =
2
kt
arctan
Ut
2 x
sin(kx)
(25.43a)
The argument of the arc tangent may become arbitrarily large since the tangent
may assume any value between minus and plus infinity. This means that the phase
velocity is real for all values of t and x. For this reason the solution of the
difference equation (25.39) remains absolutely stable. Since arctan x ≈ x for
|
x
|
1wefind
lim
x,t→0
c = U (25.43b)
so that in the limiting case we obtain the required phase velocity.
The implicit method is used in many practical applications, since the CFL
criterion does not have to be obeyed in the implicit method. However, the smaller
the values of t and x the closer the agreement with the analytic solution, in
general.
The implicit treatment of the meteorological equations is very time-
consuming. In order to reduce the numerical effort Robert (1969) introduced the
so-called semi-implicit method. This is a procedure that treats implicitly only those
terms which are mainly responsible for the propagation of the high-speed waves
requiring very small time steps in the explicit treatment. The remaining terms are
treated explicitly. This leads to a considerable increase of t, which is now limited
only by the slower waves of meteorological significance.
25.5 The aliasing error and nonlinear instability 645
25.5 The aliasing error and nonlinear instability
In order to demonstrate the existence of a different type of instability, we consider
the one-dimensional nonlinear advection equation
∂u
∂t
+ u
∂u
∂x
= 0(25.44)
which is always a part of the equations of motion. The analytic solution, as is easily
verified, is given by
u = f (x − ut)(25.45)
where f is an arbitrary function. We now consider the nonlinear term which results
from the multiplication of u and its spatial derivative. When the calculation is
performed in finite differences, we obtain an error due to the inability of the grid to
resolve wavelengths shorter than 2 x, or wavenumbers larger than k
max
= π/x.
Mesinger and Arakawa (1976) give an illuminating example by considering the
function
u = sin(kx)(25.46)
where k<k
max
. Substituting (25.46) into the nonlinear term gives
u
∂u
∂x
= k sin(kx)cos(kx) =
1
2
k sin(2kx)(25.47)
The wavenumber appearing in the sine wave of (25.47) is twice as large as the
original wavenumber in (25.46). Suppose that the wavenumber in (25.46) is in the
interval
1
2
k
max
<k≤ k
max
. It follows that the nonlinear term produces a wave that
cannot be resolved by the grid, which leads to an improper evaluation of the finite-
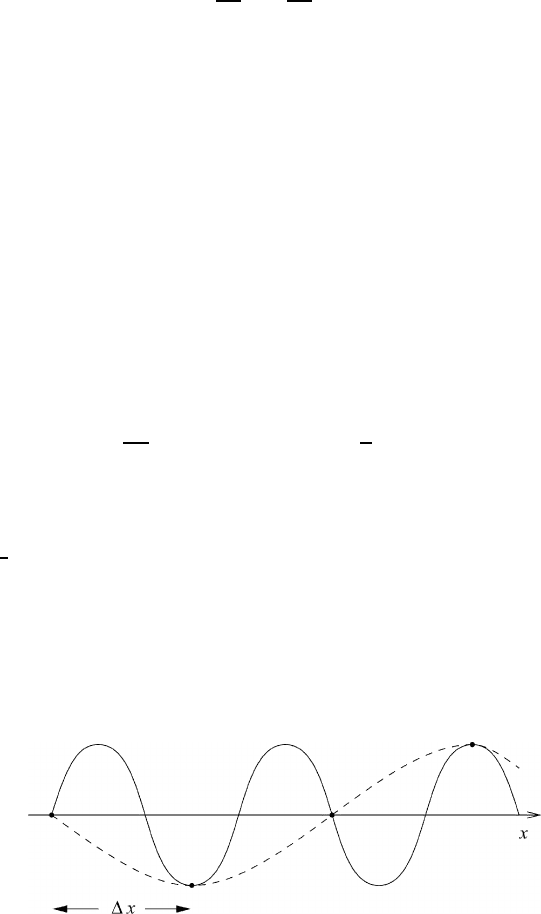
difference calculation. To gain further insight, consider a wave whose wavenumber
exceeds k
max
. This, for example, is the case if the wavelength is 4 x/3, as shown
by the full line in Figure 25.4.
Fig. 25.4 Misrepresentation of a wave of length 4 x/3 (full curve) as a wave of length
4 x due to the use of the finite-difference grid.

646 An excursion concerning numerical procedures
All we can know about a variable is its values at the grid points. Therefore, we
cannot distinguish this wave from the dashed-line wave of wavelength 4 x.This
misrepresentation is known as the aliasing error.
In the more general case the variable u will be represented by an infinite series
of harmonic components of the type (25.46):
u =
n
u
n
with u
n
= sin(k
n
x)(25.48)
so that many nonlinear terms of the type sin(k
1
x)sin(k
2
x) will appear due to the
nonlinear term. This, of course, will falsify the energy spectrum of the process
to be studied. Since aliasing is due to nonlinear effects one speaks of nonlinear
instability. Apparently, this effect was first encountered by Phillips (1956) in his
famous numerical experiment modeling the general circulation of the atmosphere.
Arakawa (1966) and Arakawa and Lamb (1977) constructed finite-difference
equations that suppress the effect of nonlinear instability by restricting the inter-
action between the resolved and unresolved scales. We refer to Kasahara (1977),
who used the simple nonlinear advection equation (25.44) to demonstrate the basic
property of the Arakawa scheme. First of all, we consider the integrated linear
momentum M
u
and the kinetic energy K
u
per unit mass
M
u
=
L
0
udx, K
u
=
1
2
L
0
u
2
dx (25.49)
The dependent variable u is defined on a cyclic continuous domain from x = 0to
x = L so that u(0) = u(L). In the integrated form the advection equations for the
linear momentum and the kinetic energy can be written as
(a)
L
0
∂u
∂t
dx =−
L
0
u
∂u
∂x
dx =−
L
0
∂
∂x
u
2
2
dx = 0
(b)
L
0
∂
∂t
u
2
2
dx =−
L
0
u
∂
∂x
u
2
2
dx =−
L
0
∂
∂x
u
3
3
dx = 0
(25.50)
since u(0) = u(L). Equation (25.50a) implies the well-known space-centered
difference scheme
∂u
j
∂t
=−
(u
j+1
)
2
− (u
j−1
)
2
4 x
(25.51)
Using (25.51), we may approximate (25.50a), to obtain
∂
∂t
J
j=1
u
j
=−
1
4 x
J
j=1
[(u
j+1
)
2
− (u
j−1
)
2
] = 0(25.52)
25.5 The aliasing error and nonlinear instability 647
where J = L/x must be a natural number. Hence it is seen that the finite-
difference scheme (25.51) conserves the momentum. It will be left as an excercise
to show that the kinetic energy is not conserved by using (25.51) as indicated by
∂
∂t
J
j=1
u
2
j
2
= 0(25.53)
The conservation of the momentum by itself does not ensure computational stabil-
ity.
Both momentum and energy may be conserved by using an alternate scheme.
By writing (25.44) in the form
∂u
∂t
=−u
∂u
∂x
=−
1
3
u
∂u
∂x
+
∂u
2
∂x
(25.54)
we find the finite-difference approximation
∂u
j
∂t
=−
1
3
u
j
u
j+1
− u
j−1
2 x
+
(u
j+1
)
2
− (u
j−1
)
2
2 x
(25.55)
It will be left as an exercise to show that the scheme (25.55) conserves the
momentum and the kinetic energy. A difference scheme may be stable if it conserves
both the momentum and the kinetic energy. Since no change in the potential energy
of the system occurs, the total energy is conserved. This prevents the spurious
growth of energy which may occur on using (25.51) and various other advection
schemes. Additional details are given by Washington and Parkinson (1986), where
further references may be found, particularly with respect to the use of spatial-
difference schemes.
It is well known that most numerical modeling of all scales of atmospheric flow is
based on the approximation of horizontal derivatives by finite differences. The basic
concepts of finite-difference approximations are relatively simple to understand.
Indeed, much sophistication has gone into the construction of many finite-difference
schemes, which are needed in order to handle various flow problems. It is fair to
say that numerical modeling of atmospheric flow since the pioneering work by
Charney et al. (1950) has been a story of great success. Most of the numerical work
represents the meteorological variables in space and time on a finite-difference
grid. However, there are other methods for describing atmospheric fields. It has
been shown by various modelers of the atmospheric flow that hemispheric and
global modeling can be advantageously carried out by means of a spectral model
that makes use of the orthogonality properties of the spherical functions. Various
versions of spectral models have been devised. In the next chapter we will briefly
discuss the philosophy of the spectral model and show how the model equations
may be obtained.
648 An excursion concerning numerical procedures
25.6 Problems
25.1: Show that equation (25.39) can be expressed with the help of a band matrix
multiplying the vector
ψ
n+1
1
,ψ
n+1
2
,...
T
, where T denotes the transpose. The
boundary points are assumed to be independent of time; all ψ
n
j
are considered to
be known.
25.2: Show all steps between (25.41) and (25.43a).
25.3: Verify equation (25.53) by using equation (25.51).
25.4: Show that the momentum and the kinetic energy are conserved by using
(25.55).
26
Modeling of atmospheric flow by spectral techniques
26.1 Introduction
The representation of atmospheric flow fields by means of spherical functions has a
long history. Haurwitz (1940) represented the movement of Rossby waves by means
of spherical functions. The development of the spectral method for the numerical
integration of the equations of atmospheric motion goes back to Silberman (1954),
who integrated the barotropic vorticity equation in spherical geometry. The spectral
method attracted the attention of others and studies were performed, for example, by
Lorenz (1960), Platzman (1960), Kubota et al. (1961), Baer and Platzman (1961),
and Elsaesser (1966). Lorenz demonstrated that, for nondivergent barotropic flow,
the truncated spectral equations have some important properties. Just like the exact
differential equations, they preserve the mean squared vorticity, called enstrophy,
and the mean kinetic energy. Platzman pointed out that this very desirable property
automatically eliminated nonlinear instability, which at that time was a substantial
difficulty in grid-point models. The early work made use of the so-called interaction
coefficients to handle nonlinearity. This cumbersome procedure was replaced by the
efficient transform technique for solving the spectral equations, which was devised
independently by Orszag (1970) and by Eliasen et al. (1970). In compressed form
the essential information on spectral modeling is given by Haltiner and Williams
(1980). Much valuable information about spectral techniques – which is usually
not readily available – can be extracted from the “gray” literature. We refer to an
excellent report by Eliasen et al. (1970). Finally, we refer the reader to an excellent
article on “Global modelling of atmospheric flow by spectral methods”, by Bourke
et al. (1977). This article states the merits of the spectral relative to finite-difference
models. We will briefly repeat these.
Foremost among the advantages of the spectral method relative to finite-
difference methods are
649
650 Modeling of atmospheric flow by spectral techniques
(i) the intrinsic accuracy of evaluation of horizontal advection,
(ii) the elimination of aliasing arising from quadratic nonlinearity,
(iii) ease of modeling flow over the entire globe, and
(iv) the ease of incorporation of semi-implicit integration over time.
These characteristics of the spectral method result in highly accurate and
stable numerics and efficient and simple computer coding. The spectral transform
technique described in this chapter follows the description in Technical Report
No. 6 “The ECHAM 3 Atmospheric General Circulation Model”, DKRZ, Hamburg,
1993, where the operational forecast model is presented. The model equations are
based on various suitable approximations to simplify the required parameterizations
of fluxes and the numerical procedures. These approximations include simplified
forms of the continuity equation and the heat equation. We do not discuss these
approximations but use the equations in the forms given in the previous chapters.
Since the model equations ignore the diffusion flux of the dry air, it becomes
possible to reduce the system of continuity equations of the partial masses to a
single prediction equation for the moisture variable q = m
H
2
O
, which here refers
to the sum of the specific humidity for the vapor (m
1
), the specific liquid (m
2
), and
the specific ice content (m
3
). All physical effects are thought to be described by the
symbol Q
q
. The moisture equation in the model is structured in such a way that it
is compatible with the heat equation.
26.2 The basic equations
In this section we will present the basic equations used for the spectral representa-
tion. These are the horizontal equations of motion, the continuity equation and the
hydrostatic equation, the prognostic equations for temperature, and the moisture
variable q. These equations have been derived in previous chapters but need to be
rewritten to a certain extent. First of all we repeat the equation for the individual
derivative in the spherical system, see equation (19.15),
d
dt
=
∂
∂t
+
u
a cos ϕ
∂
∂λ
+
v
a
∂
∂ϕ
+
˙
ξ
∂
∂ξ
(26.1)
where we have used the unspecified general vertical coordinate ξ and r has been
replaced by the constant earth radius a. Robert (1966) has pointed out that it is
appropriate for the spectral representation of the flow field on the globe to replace
the original velocity components by the transformation
u =
U
cos ϕ
,v=
V
cos ϕ
(26.2)
For notational convenience it is costumary to introduce the symbol µ = cos θ =
sin ϕ,whereθ = π/2 − ϕ is the co-latitude. From this definition follows a