Yi Lin. General Systems Theory: A Mathematical Approach
Подождите немного. Документ загружается.

284
Chapter 10
From the hypothesis that S is injective, it follows that x = w,
that is,
Hence, S
i
is bijective.
Proposition 10.4.6.
Suppose that S
⊂
X
×
Y is a functional linear time system that
S has been decomposed into a family of component systems
such that S is noninteracted; i.e., If S is time invariably
realizable, each component system S
i
is then also time invariably realizable.
Proof: From the hypothesis that S is a functional system from X into Y, it
follows that
D
(S) ⊂ X. Thus, from the proof of Proposition 10.4.4, for each fixed
i
∈ I, D(S
i
) =
X
i
.
We now let t ∈ T and x
i
∈ X
i
be arbitrary. There exists an element
x
0
∈ X such
that
Since
S
is time invariably realizable, from Eq. (10.76) it follows
that for t ∈ T,
(10.103)
Let
Then x
0
∈ A ≠
Ø
and each x ∈ A satisfies
Eq. (10.103), which implies that
(10.104)
Therefore,
(10.105)
Applying Eq. (10.76), we complete the proof that
S
i
is time invariably realizab1e.
The following result combines Propositions 10.4.1–10.4.6.
Systems of Single Relations
285
Theorem 10.4.1.
Let S
⊂
X
×
Y be an input–output system which has been decom-
posed into a family of factor systems
such that
Then the following statements hold:
(1) S is a linear system if and only if each S
i
is a linear system.
(2) S is a linear time system if and only if each S
i
is a linear time system.
(3) S is strongly stationary if and only if each S
i
is strongly stationary.
(4) S is causal if and only if each S
i
is causal.
(5) S is bijective if and only if each S
i
is bijective.
(6)
The functional system S is time invariably realizable if and only if each S
i
is functional and time invariably realizable.
The proof is not hard and is left to the reader.
Theorem 10.4.1 shows that the theoretical properties of many important sys-
tems are either hereditary from the overall system S to each component system S
i
or able to be lifted up from S
i
to S. In practice, we always hope to study S by
studying each component system
S
i
.
Let S ⊂ X × Y be a linear system. We say that S can be decoupled by feedback
if there exists some functional system
S
ƒ
∈
ƒ
such that
(10.106)
where it is assumed that
is the projection defined by relation (10.96).
The concept of decoupling by feedback shows the following actions: The
original system S may not be noninteracted, so there might be some properties
which cannot be lifted up from component systems to the overall system S. If S is
decoupled by feedback, after applying appropriate feedback transformation, S is
transformed to a system which has a noninteracted complex systems representation.
We now can use that representation to analyze and control S.
Theorem 10.4.2.
Suppose that S
⊂
X
×
Y and S
ƒ
: Y → X are a linear system and
a functional linear system, respectively, such that S is decomposed into
and S
ƒ
is decomposed into
Then, for each i ∈ I,
(10.107)
286
Chapter 10
Proof:
For each
there exists (x,y
)
∈
F
(
S,S
ƒ
) such that
Π
i
(x ,y) = (
x
i
,y
i
). Since, it follows that
(10.108)
Equation (10.108) implies that
That is,
Let
be arbitrary. There then exists (x,y) ∈ S such that
(10.109)
Therefore,
From this, we have
(10.110)
Equation (10.110) gives
Theorem 10.4.3.
Assume the Axiom of Choice. Suppose that S
⊂
X
×
Y is a linear
system that can be decomposed into a family of component systems
= {
S
i
: i ∈ I
}.
Then S can be decoupled by feedback if and only if R
(
S) = Π
{
R
(
S
i
) : i ∈ I } and
N
(
S) =
Π
{
N
(
S
i
) :
i
∈
I
}.
Proof:
Necessity. Suppose S can be decoupled by feedback. By the definition
of decoupling by feedback, there exists a functional linear system S
ƒ
∈
ƒ
such
that
(10.111)
Systems of Single Relations
287
Therefore, by Theorem 10.2.5,
(10.112)
and
(10.113)
Sufficiency. Let S'
⊂ X × Y be the system defined by
(10.114)
Since and
due to our assumption,
we see that R(S) = R
(
S'
) and N
(
S) = N
(
S'
). By applying Theorem 10.2.5, we
find there exists a functional linear system S
ƒ
∈
ƒ
such that
(10.115)
That is,
S
can be decoupled by feedback.
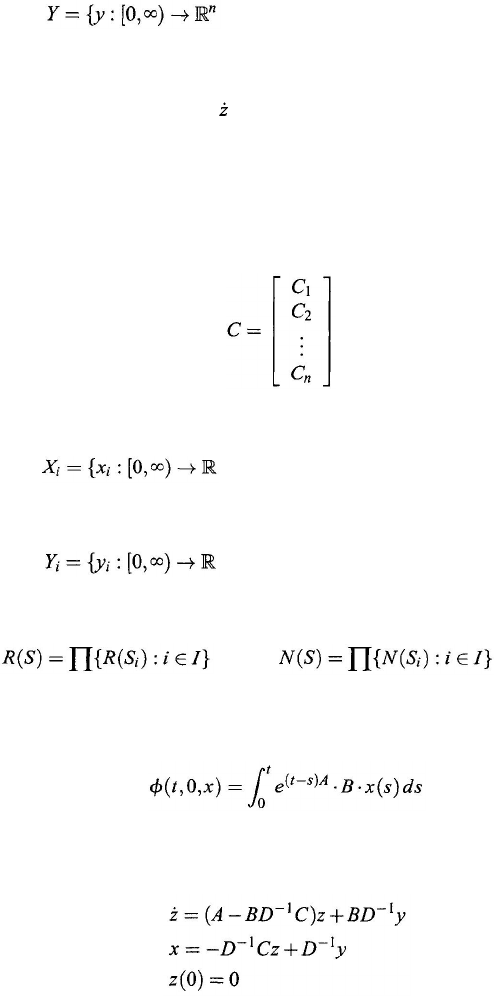
Example 10.4.2. As an example of decoupling by feedback, consider the multi-
variable system S defined by
= Az + Bx
y = Cz + Dx
z
(0) = 0
(10.116)
where z is an m × 1 variable vector, A an m × m constant matrix, B an m × n
constant matrix, C an n
× m constant matrix, D an n × n nonsingular constant
matrix, and
:
x
is piecewise continuous}
(10.117)
288
is the input space and
: y is piecewise continuous}
is the output space. For each
i
= 1, 2, . . . ,
n,
define the system
S
i
by
= Az+B
i
x
i
y
i
= C
i
z
+
D
i
x
i
z(0) = 0
Chapter 10
(10.118)
(10.119)
where
B
i
is an m × 1 constant matrix such that B = [B
l
B
2
. . . B
n
], C
i
is a 1 × m
constant matrix such that
D
i
is a nonzero constant, and
: x
i
is piecewise continuous}
is the input space and
: y
i
is piecewise continuous}
(10.120)
(10.121)
(10.122)
is the output space. Then the systems
S
and
S
i
, i = 1, 2, . . . , n, satisfy
and
(10.123)
In fact, for any x ∈ X, the solution of the differential equation (10.116) in S is
given by
(10.124)
Thus,
D
(
S) = X. At the same time, since the matrix D is nonsingular, the inverse
system
S
–1
of
S
is obtained as follows:
(10.125)
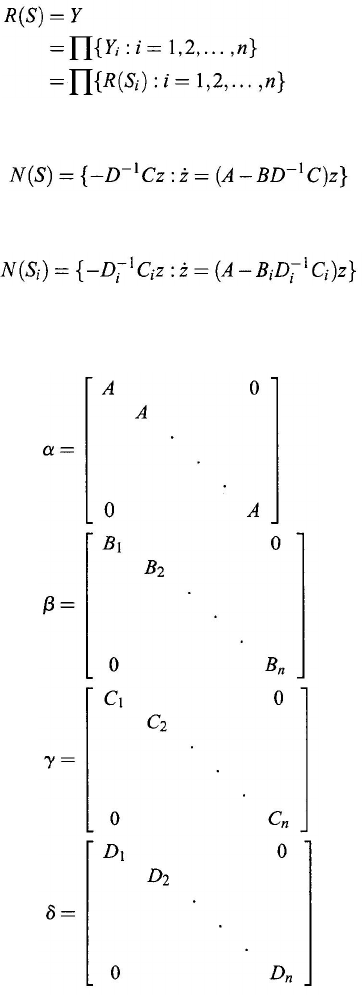
Systems of Single Relations 289
Therefore, a similar argument shows that R
(
S) = D (
S
–1
) = Y. For the same
reason, we can show that for each
i
= 1, 2, . . . ,
n, R
(S
i
) = Y
i
. That is,
For the null spaces of the systems S and S
i
, i
= 1, 2, . . . ,
n,
(10.128)
Therefore,
N
(
S) = Π{N( S
i
) : i = 1, 2, . . . , n }. By Theorem 10.4.3, S can be
decoupled by feedback. In fact, define
(10.126)
(10.127)
and
290
Chapter 10
Then the system
S
d
= S
1
× S
2
×
. . .
×
S
n
is represented by
= α
z +
βx
y
=
γ
z +
δx
z (0)=0
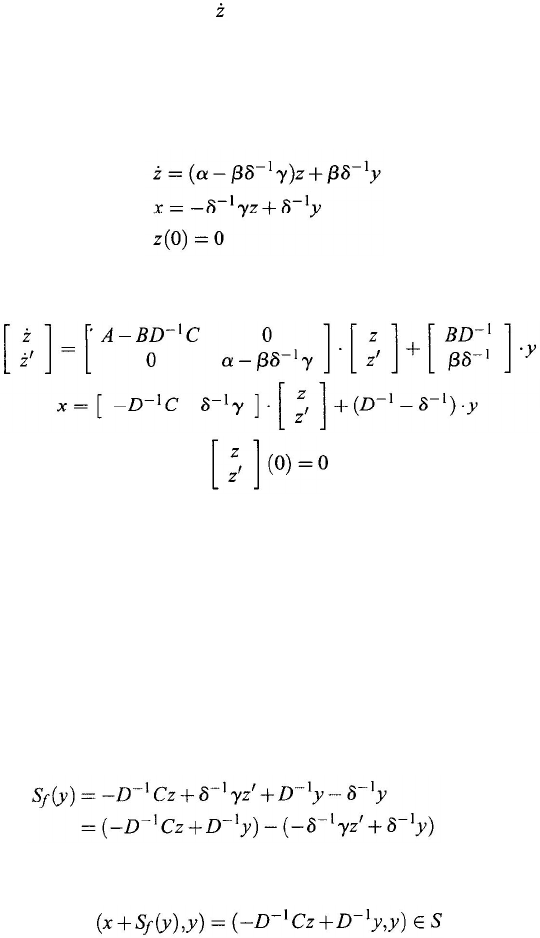
Since
δ
is nonsingular,
S
–1
d
is obtained as follows:
(10.129)
(10.130)
If we define a functional linear system
S
ƒ
: Y → X as follows:
(10.131)
Then the original system S can be transferred into S
d
by this feedback component
system
S
ƒ
. In fact, for any pair (x,y) ∈ X × Y, (x,y
)
∈
S
d
iff the input x and the
output
y
satisfy the systems representation in Eq. (10.130) iff (
x + S
ƒ
(y), y) ∈ S.
We show the last “if and only if” condition as follows.
First, suppose that the input x and the output y satisfy the systems represen-
tation in Eq. (10.130). Let z' be the solution of the differential equation in the
representation in Eq. (10.130), and let z be the solution of the differential equa-
tion in the systems representation in Eq. (10.125). Then [
zz']
T
is the solution of
the differential equation in the systems representation in Eq. (10.131). From the
definition of
S
ƒ
, it follows that
(10.132)
Therefore,
(10.133)
where the membership relation comes from the systems representation in
Eq. (10.125) of the inverse system
S
–1
.
Systems of Single Relations
291
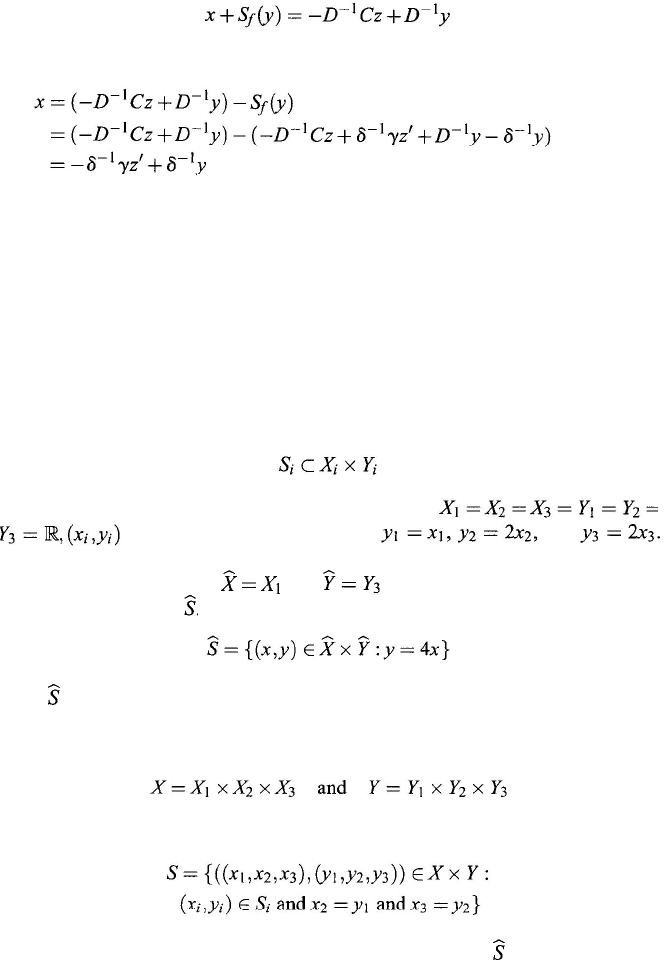
Second, suppose that a pair (
x, y) ∈ X × Y satisfies (x + S
ƒ
(
y
), y) ∈ S. From
the systems representations in Eqs. (10.125) and (10.131), we have
(10.134)
That is,
(10.135)
Combining Eq. (10.135) with the systems representation in Eq. (10.130) proves
that the pair (x, y) satisfies the systems representation in Eq. (10.130).
10.5. Decomposability Conditions
Intuitively speaking, a complex system consists of several subsystems (see,
for example, Sections 9.3 and 9.6). Let us first consider the following example.
Suppose that
(10.136)
for
i
= 1, 2, 3, are three input–output systems such that
1, 2, 3 if and only if
and
Suppose these three systems are connected in series; that is, x
2
= y and x
1
3
= y
2
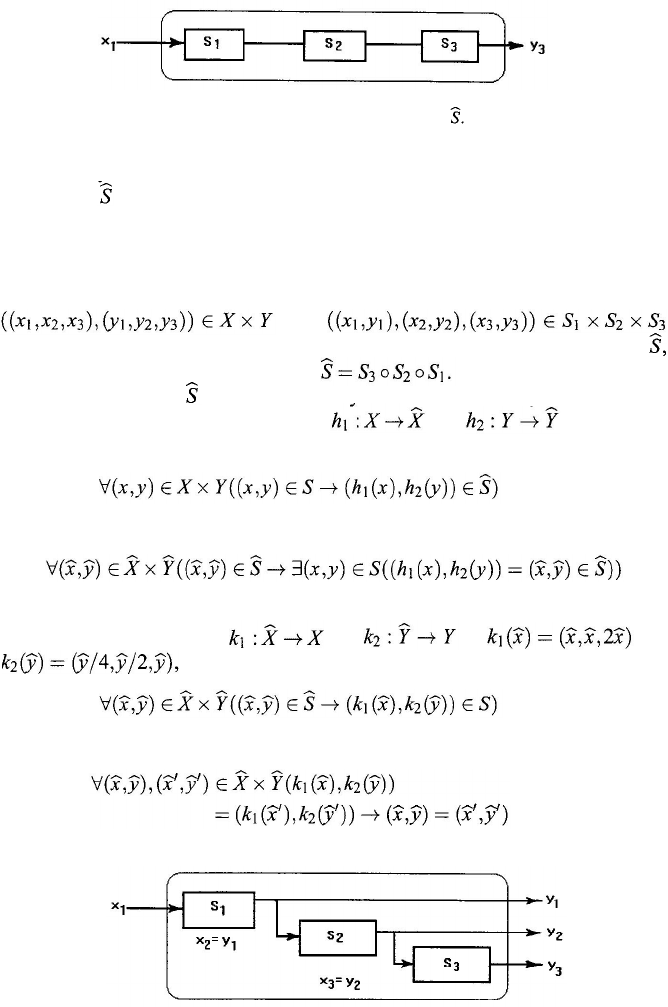
hold; furthermore, suppose
and
are the input space and the output
space of a new system , defined as
(10.137)
Then
is the composition of
S
1
,
S
, and
S
. However, in Eq. (10.137), the
2
3
component systems
S
1
, S
2
, and S
3
completely disappeared.
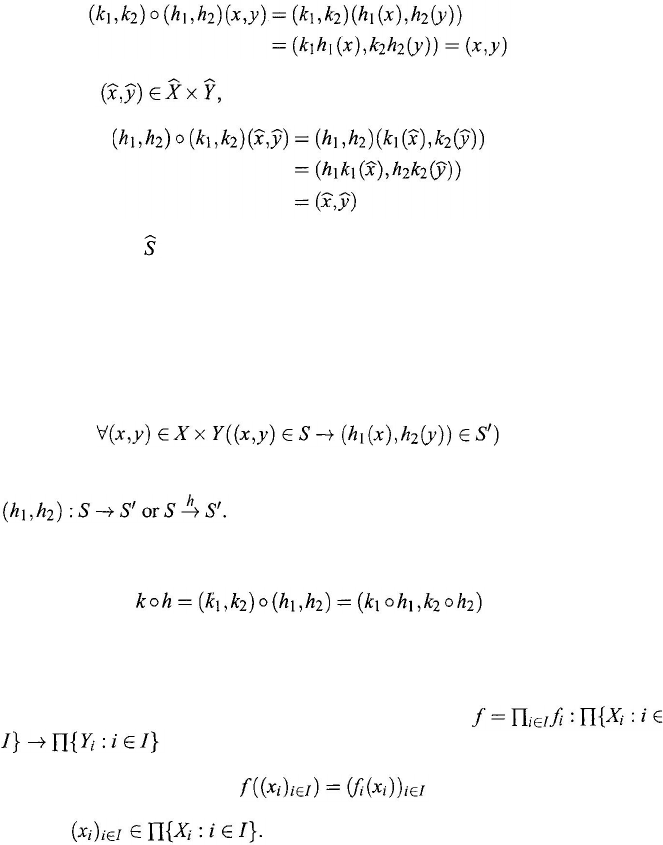
Let us now consider another construction of a new system S. We let
(10.138)
and the new system S ⊂ X × Y is defined by
(10.139)
Figures 10.10 and 10.11 show the geometric meanings of
and S. The system
S is a representation of the whole system, which explicitly reflects the fact that
∈
S
i
, i =
292
Chapter 10
Figure 10.10. Structure of the system
the whole system is composed of three component systems S
i
, i = 1, 2, 3. The
structure of
is called a global system representation of the whole system, while
S is a complex system representation of the whole system. In fact, S is the product
system of S
i
,
i
= 1, 2, 3.
The complex system S is defined over X and Y, but to emphasize
fact that S consists of the component systems S
1
, S
2
, and S
3
, we identify
with
and denote the complex system S by S
⊂ S
1
× S
2
×
S
3
. For the global system
we emphasize the structure by writing
The global system
and the complex system S are intimately related to each
other. In fact, if we define two mappings
(10.140)
and
(10.141)
If we define two mappings
and
by
and
then k
1
and k
2
satisfy the relations
(10.142)
and
(10.143)
Figure 10.11. Structure of the system S.
by h
,
1
(
x
1
,
x
2
and
x
3
) = x
1
and
h
2
(y
1
,
y
2
,
y
3
) = y
3
, then
Systems of Single Relations
293
Combining relations (10.140)–(10.143), we can see that for any
(x, y) ∈ X × Y
,
(10.144)
and for any
(10.145)
Therefore,
S
and are similar.
Generally, let S ⊂ X × Y and S' ⊂ X' × Y' be two input–output systems, and
h
i
, i = 1, 2, be mappings such that
h
1
: X → X' and
h
2
:
Y
→
Y'
(10.146)
satisfying the condition
(10.147)
Then h =
(
h
1
, h
2
) is called a modeling relation from S to S' and is denoted by
Notice that h is actually a mapping from S into S'.
Proposition 10.5.1. Suppose that h = (
h
1,
h
2
) and k = (
k
1
,
k
2
) are modeling re-
lations from system S
1
to system S
2
and from S
2
to system S
3
, respectively. Then
the composition
is a modeling relation
from S
1
to S
3
.
The proof is straightforward and is omitted.
Y
i
: i ∈ I} are families of sets and that {
ƒ
i
: X
i
→
Y
i
: i ∈ I} is a family of mappings. The product mapping
is defined by
(10.148)
for any
When I = {1, 2, . . . , n} is finite, we denote the
product mapping ƒ by
ƒ
1
×
ƒ
2
×
…
×
ƒ
n
. The following result shows the relation
between the concept of modeling relations and that of product mappings.
and
k = (
k
1
,
2
) are two modeling
relations from system S to system S'. Then the restriction of the product mappings
Suppose {X
i
: i ∈ I} and {
Proposition 10.5.2. Suppose that h = ( h
1,
h
2
)
k
h
1
× h
2
and
k
1
×
k
2
on S are mappings from S to S'. Furthermore, if D(
S
) = X
and R
(
S
) = Y, then h
1
×
h
1
2
⎥
S = k
×
k
2
⎥
if and only if h
S
i
=
k
i
, i = 1, 2.