Yi Lin. General Systems Theory: A Mathematical Approach
Подождите немного. Документ загружается.

264
Chapter 10
The proofs that (3) implies (1) and (2) implies (3) are clear because we can
define the desired mappings R
1
and R
2
by
and
where 0
x
and 0
c
are the additive identities in the linear spaces
X
and
C
, respectively.
Proof that (1) implies (2). Suppose S is a linear system and 0
x
and 0
y
are the
additive identities in X and Y
, respectively. Define
(10.20)
Then C
≠ ø; in fact, 0
y
∈ C because , and C is a linear subspace
over
. Consider the quotient space with addition +*
and scalar multiplication ·* defined by
and
for any
α ∈
and any (
b
1
+ C ) and
Define a mapping by letting
(10.21)
if (x
,
y
)
∈
S
for every
x
∈
D
(
S). Then σ is well defined. In fact, for each x ∈ D(S
)
and any
y
1
,
y
2
∈
Y
satisfying
and thus , so . This means that
Define a linear mapping
as follows:
(10.22)
We now choose an isomorphism
I
:
Y
/
C ⊕ C → Y satisfying I
(
y,
C
) = y for every
y
∈ Y
/
C.
Now the desired mapping
ρ
:
C
×
D
(
S
)
→
Y
can be defined by
Then (x,y ) ∈ S if and only if there exists c ∈ C such that ρ
(
c
,
x) = y. In fact, if
(
x, y
)
∈
S
, there exists
c
∈
C
such that
, so
On the other hand, if (
x
,
y) ∈ X × Y is such that there exists c ∈ C with ρ (
c
,
x )=y
,
then
, so
. Suppose
Then y = y
1
+
c
1
for some
c
1
∈ C; hence,
(10.23)
This completes the proof of the theorem.
Example 10.2.1. Three examples are given to show that the concept of linear
systems is an abstraction of different mathematical structures.
(a) Suppose S is a system described by the following linear equations:
Systems of Single Relations
265
where x
i
, i = 1,2, . . .
,
n
, are n variables, m is the number of equations, a
ij
, (i =
1,2
, . . . ,
m
;
j
= 1,2, . . .
,
n
) are the coefficients of the system, and
b
j
,
j = 1,2,. . . , m,
are the constraints of the system. The system S can then be rewritten as a linear
system (
M, {
r
}), where the object set M is the set of all real numbers, and
where
is fixed such that for
each i = 1, 2, … , m.
(b) Suppose a given system S is described by the differential equations
where
, and f (t
)
are continuous functions defined on the
interval [
a
, b]. The system S can be rewritten as a linear system (M, {
r
}) in the
following way: The object set M is the set of all continuous functions defined on
[
a
, b], and the relation r is defined by
where y
∈ M is a fixed function such that
a system such that the object set M is a linear space over
system if for each relation r
∈ R there exists an ordinal number n = n(r) such
. Then S is a linear
(c) Suppose X is a linear space over a field , and Y a set of some linear
transformations on X. Then Y can be studied as a linear system (X
,
R), where,
for each relation r
∈ R, there exists a transformation y ∈ Y such that for any
if and only if y(
x
1
) = x
2
.
In Example 10.2.1(b), S is not an input–output linear system. Generally, the
concept of general linear systems is the following: Let
be a field and S = (M
,
R
)
that r is a linear subspace of M
n
.
We will study only input–output linear systems
defined in the beginning of this section.
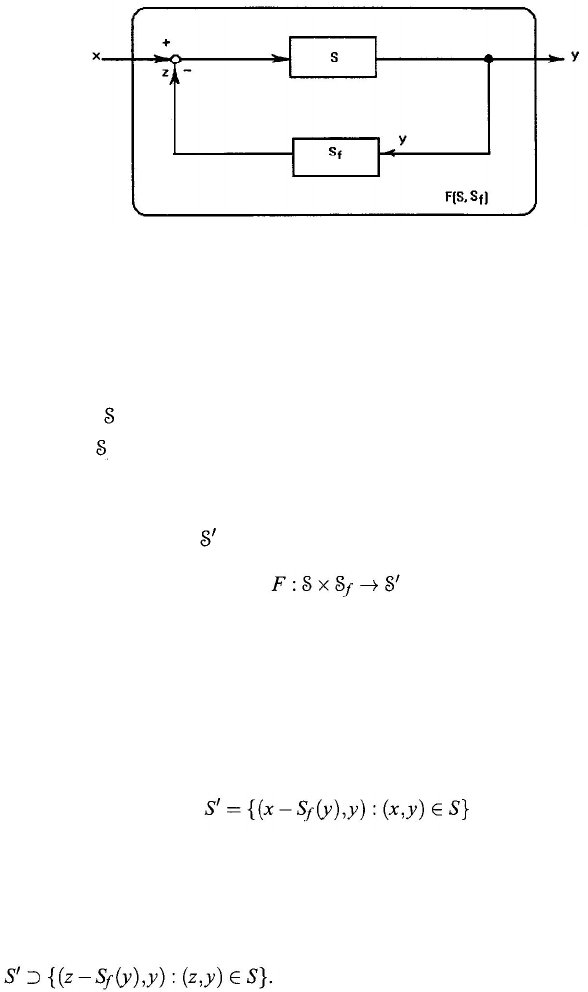
An input–output system S
⊂ X × Y is a functional system if S is a function
from the input space X into the output space Y. Let S
⊂ X × Y and S
ƒ
: Y → X
be a linear system and a linear functional system, respectively. Then the feedback
system of S by S
ƒ
is defined as the input–output system S
′
such that
and
(10.24)
266
Chapter 10
Figure 10.4. Structure of feedback systems.
The systems S and S
ƒ
are called an original system and a feedback component
system, respectively.
Let
= {
S ⊂ X × Y : S is a linear system}
(10.25)
ƒ
= {S
ƒ
: Y → X : S
ƒ
is a linear functional system}
(10.26)
and
= {S'
⊂ X × Y : S' is a subset}
(10.27)
Then a feedback transformation is defined by Eq. (10.24), which
is called the feedback transformation over the linear spaces X and Y. Figure 10.4
shows the geometric meaning of the concept of feedback systems.
The following theorem gives a concrete structure of each feedback system.
Theorem 10.2.2. Suppose that S
⊂ X × Y is a linear system and S
ƒ
: Y → X a
linear functional system. Then a subset S'
⊂ X × Y is the feedback system of S by
S
ƒ
, iff
(10.28)
Proof: Necessity. Suppose S' is the feedback system of S by S
ƒ
. Then,
by the definition of feedback systems, for each (
x, y) ∈ S', (x + S
ƒ
(y), y) ∈ S.
This implies that (x ,
y
)
∈
{ (
z – S
ƒ
(y), y) : (z, y
)
∈
S
}. Again, the relation in
Eq. (10.24) implies that for each element (
x, y) ∈ S
, (
x – S
ƒ
(y), y) ∈ S'. That is,
Sufficiency. Clear because Eq. (10.28) implies the relation in Eq. (10.24).
Systems of Single Relations
267
Theorem 10.2.3. Suppose that S, S' ⊂ X × Y are linear systems and S
f
:
Y
→
X
is a linear functional system such that
(10.29)
Then F
(
S'
,
–S
f
) = S, where –S
f
: Y → X is the linear functional system defined
by
(10.30)
for every y
∈ Y.
The proof is straightforward and omitted.
Theorem 10.2.4.
For each linear system S
⊂
X
×
Y, there exists a linear functional
system S
f
: Y → X such that F(
S,S
f
) = S, that is, S is a feedback system of itself.
Proof: The desired linear functional system S
f
: Y → X can be defined by
(10.31)
for every y
∈ Y. Then, Eq. (10.28) says that S = F(
S,S
f
).
Theorem 10.2.5 discusses the control problem: A linear structure (say, system)
S ⊂ X × Y is fixed. According to some predefined targets, we need to produce a
new linear structure (say, a linear subspace) S'
⊂ X × Y
. Can we design a feedback
process
S
f
: Y → X such that F (
S, S
f
)
= S'
?
Theorem 10.2.5. Assume the axiom of choice. For each linear system S ⊂ X × Y
and arbitrary linear subspace S'
⊂ X × Y, there exists a linear functional system
S
f
: Y → X such that F(
S,S
f
) = S' iff R
(
S'
) = R
(
S
) and N
(
S'
) = N
(
S
), where
N
(
W
) indicates the null space of the input–output system W ⊂ X × Y, defined by
(10.32)
Proof:
Necessity. Suppose there exists a linear functional system
S
ƒ
: Y → X
such that F
(
S,S
ƒ
) = S'. Then Theorem 10.2.2 implies that R(
S')
= R
(
S
) and that
268
Chapter 10
Sufficiency. Suppose that S and S' have the same output space and the null
space; i.e., R(
S'
) = R
(
S
) and N
(
S'
) = N(
S
). We define a linear functional system
S
f
: Y → X such that F(
S,S
f
) = S'.
For each element y
∈ R (
S'
), let
(10.33)
and
(10.34)
From the Axiom of Choice, it follows that there exist mappings
(10.35)
and
(10.36)
such that
[
i.e.,
(
C
(
y
),
y) ∈ S].
and
[i.e.,
We are now ready to check that for each y ∈ R (
S'
) = R
(
S
)
,
(10.37)
Thus, the mappings C and C' are well defined.
Let {
y
i
: i ∈ I
} be a basis in the linear space
R
(
S'
)
, where I is a finite or infinite
index set. We now define a linear functional system
(10.38)
satisfying
, for each i ∈ I. Then we make the following
claim.
Claim. The systems S, S', and S
f
have the property that F
(
S, S
f
)= S'.
In fact, for each element (
x,y
i
) ∈ S', for an i ∈ I, we have
since
(10.39)
Therefore, from Eq. (10.39),
(10.40)
Systems of Single Relations
269
Now let (x
,
y
i
) ∈ S we then have
, because
(10.41)
Hence, we have from Eq. (10.41) the opposite implication of Eq. (10.40). That is,
for every i
∈ I,
(10.42)
It now remains to show that for each pair (x
,
y) ∈ X × Y, the relation in
Eq. (10.24) holds. Let (
x
,
y) be an arbitrary element in S'. Then
for a
finite number of
y
i
’s from the basis {
y
i
: i ∈ I
}, where each
c
i
is a nonzero number.
Then
In fact,
(10.43)
This gives us the implication from the right to left in Eq. (10.24). The opposite
implication can be shown as follows. For each pair
In fact, let
for some finite number of nonzero coefficients
c
i
, where
each y
i
is from the basis {
y
i
: i ∈ I
}. Then
(10.44)
270
Chapter 10
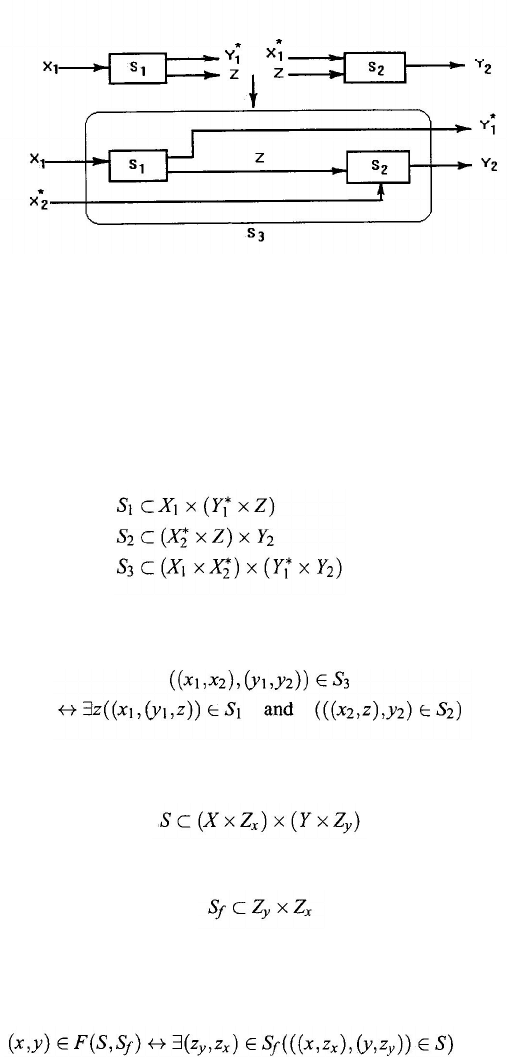
Figure 10.5. Structure of cascade connections of systems.
This completes the proof of Theorem 10.2.5.
We conclude this section with a discussion of a more general definition of the
concept of feedback systems. Let
*
be a system connecting operator, termed the
cascade (connecting) operation. The operation
*
is defined as follows: Let S
i
,
i=
1,2,3, be input–output systems such that
(10.45)
(10.46)
(10.47)
where it is assumed that no algebraic properties are given on each set involved.
The three systems satisfy
S
1
*
S
2
= S
3
if and only if
(10.48)
Figure 10.5 shows the geometric meaning of the cascade connection of systems.
We now let S and S
ƒ
be two input–output systems such that
(10.49)
and
(10.50)
where
S
ƒ
is called a feedback component of S. The relationship between the two
systems is displayed in Fig. 10.6.
The feedback system F
(
S,S
ƒ
) of S by S
ƒ
is defined by
(10.51)

Systems of Single Relations
271
Figure 10.6. Construction of general feedback systems.
In constructing F
(
S, S
ƒ
) step by step, we first cascade S and S
ƒ
(i.e., find S
*
S
ƒ
)
and then input one of the two outputs of the system S
*
S
ƒ
.
Without special explanation in this book, by feedback system we always mean
the definition given by Eq. (10.24).
10.3. Feedback-Invariant Properties
Some properties of original systems may be kept by their feedback systems
and some may not. Those properties of original systems invariant under the
feedback transformation F are of special interest in research on feedback systems.
Feedback invariance has played a crucial role in characterizing homeostatic or
explosive system behaviors in various areas such as biology, engineering, social
science, and so on.
A property of a linear system S
⊂ X × Y is called feedback invariant with
respect to
ƒ
if the property also holds for the feedback system F
(
S, S
ƒ
) for each
linear functional system S
ƒ
∈
ƒ
.
Corollary 10.3.1. Let S
⊂ X × Y and S
ƒ
: Y → X be a linear system and a linear
functional system, respectively. Then the feedback system F
(
S, S
ƒ
) is a linear
system over X
× Y and R
(
F
(
S, S
ƒ
)) = R
(
S) and N
(
F
(
S, S
ƒ
)) = N
(
S
).
Proof: The linearity of the feedback system F
(
S, S
ƒ
) follows from Theorem
10.2.2. The equations R
(
F
(S, S
ƒ
)) = R
(
S) and N
(
F
(
S, S
ƒ
)) = N
(
S) come from
Theorem 10.2.5 here the Axiom of Choice is not used.
272
Chapter 10
Theorem 10.3.1. Let S : X → Y and S
ƒ
: Y → X be linear functional systems such
that S is surjective. Then D
(
F
(
S, S
ƒ
)) = D(S) iff(
I
–
S
°
S
ƒ
) : Y → Y is surjective,
where I : Y
→ Y indicates the identity mapping; i.e., I
(
y) = y for each y ∈ Y.
Proof: Sufficiency. It is clear that D
(
F
(S, S
ƒ
)) ⊂ D
(
S). Let x ∈ D
(
S) be
arbitrary. There then exists some y
∈ Y such that (x, y) ∈ S. Since (I – S
°
S
ƒ
) :
Y
→ Y is surjective, there exists exactly one ∈ Y such that
(10.52)
This implies that
(10.53)
That is, ∈ S. Hence, x ∈ D
(
F
(
S, S
ƒ
)).
Necessity. Pick an arbitrary y
∈ Y. From the hypothesis that S is a surjec-
tive system, it follows that there exists some x
∈ X such that S
(
x) = y. Since
D
(
F
(
S, S
ƒ
)) = D
(
S), for this x there exists some
∈
Y
such that (
x,
)
∈
F
(
S, S
ƒ
);
i.e.,
∈ S. Hence,
(10.54)
Thus
, i.e., This proves that (
I – S
°
S
ƒ
) :
Y
→
Y
is surjective.
Theorem 10.3.2. Let S ⊂ X × Y be a linear system and S
ƒ
: Y → X a linear
functional system. Then D
(
F
(
S, S
ƒ
)) = X iff for each x ∈ X there exists a y ∈ R(S
)
such that
(
x + S
ƒ
(
y), y
)
∈
S.
The proof is clear from Eq. (10.24).
Theorem 10.3.3. Let S : X → Y be a linear functional system. Then for each
arbitrarily fixed S
ƒ
∈
ƒ
, the feedback system F
(
S, S
ƒ
) is injective iff the original
system S is injective.
Proof: Sufficiency. Suppose the original system S is injective, and let S
ƒ
∈
ƒ
be arbitrary. Suppose the feedback system F
(
S, S
ƒ
) is not injective. Thus, there
exist distinct x
1
,
x
2
∈ D
(
F
(
S, S
ƒ
)) such that
(10.55)

Systems of Single Relations
273
for some y ∈ R
(
S). By Eq. (10.24), we have (x
1
+ S
ƒ
(
y
)
,y
), (
x
2
+
S
ƒ
(
y
)
,y
)
∈
S.
Therefore, from the hypothesis that the system S : X → Y is injective, it follows
that
x
1
+ S
ƒ
(
y) = x
2
+ S
ƒ
(
y); i.e., x
1
= x
2
, contradiction.
Necessity. Suppose
F
(
S, S
ƒ
) is injective. From Theorem 10.2.3,
F
(
F
(S, S
ƒ
), –S
ƒ
) = S
Applying the proof for sufficiency, we know that
S
is injective.
Combining what have been obtained in this section, the following theorem is
evident.
Theorem 10.3.4. Range space, null space, linearity, injectivity, surjectivity, and
bijectivity of original systems are feedback invariant with respect to
ƒ
.
In the rest of this section, we study feedback-invariant properties of MT-time
systems. Let T be the time axis defined as the positive half of the real number
line; i.e., T =
[0, +
∞
). Let A and B be two linear spaces over the same field .
We define
A
T
= {
x : x is a mapping T → A
}
(10.56)
and
B
T
= {
x : x is a mapping T → B
}
(10.57)
Then the sets A
T
and B
T
can be made linear spaces over as follows: For any
elements
ƒ, g
∈
A
T
(respectively,
∈
B
T
), and α ∈
,
(ƒ + g
)(
t
) = ƒ
(
t) + g(t
)
(10.58)
and
(
αƒ
)(
t
) =
α
· ƒ
(
t
)
(10.59)
for each t ∈ T.
Assume the input space X and the output space Y in the preceding discussion
are linear subspaces of A
T
and B
T
, respectively; i.e., X ⊂ A
T
and Y ⊂ B
T
.
Proposition 10.3.1. For any linear system S
⊂ X × Y and any linear functional
system S
ƒ
: Y → X, the feedback system F
(
S, S
ƒ
) is a linear system over A
T
× B
T
.
The proof is straightforward and is omitted.
Each input–output system S
⊂ A
T
× B
T
is termed an MT-time system,
(Mesarovic–Takahara time system). Therefore, Proposition 10.3.1 implies that
the feedback transformation defined in Section 10.2 is well defined on the class of
all MT-time systems.