Wilamowski B.M., Irwin J.D. The Industrial Electronics Handbook. Second Edition: Industrial Communication Systems
Подождите немного. Документ загружается.


KNX 42-11
42.5 Devices
Various. building. blocks. exist. for. developing. KNX. compatible. devices.. Dierent. transceivers. are.
requ
ired
.depe
nding
.on.the.tran
smission
.medi
um.
.For.TP1,.four.die
rent
.tran
sceiver
.solu
tions
.allo
w
.
optim
ization
.of.the.KNX.devi
ce
.desig
n
.in.acco
rdance
.with.the.area.of.appl
ication.
.A.tran
sceiver
.circ
uit
.
cons
tructed
.from.disc
rete
.comp
onents
.oer
s
.low-
cost
.bus.acce
ss,
.but.requ
ires
.high.cert
ication
.eor
t.
.
e.use.of.the.FZE.1065.tran
sceiver
.IC.with.tran
sformer
.coup
ling
.and.bit.inte
rface
.allo
ws
.a.high
ly
.resis
-
tant
.solu
tion,
.whil
e
.the.FZE.1066.tran
sceiver
.with.dire
ct
.bus.coup
ling
.enab
les
.a.resis
tant
.and.mini
atur-
ized
.solu
tion.
.Both.tran
sceiver
.ICs.oer.a.bit.inte
rface
.and.allo
w
.impl
ementing
.a.cert
ied
.physi
cal
.laye
r
.
with.mini
mum
.eor
t.
.Fina
lly,
.the.TP-U
ART
.IC.is.a.tran
sceiver
.with.dire
ct
.bus.coup
ling
.and.a.UART.
host.inte
rface.
.It.allo
ws
.cert
ied
.and.mini
aturized
.bus.acce
ss
.with.rela
xed
.timi
ng
.requ
irements
.on.the.
micr
ocontroller,
.as.it.hand
les
.most.of.the.KNX.TP1.DL..For.the.PL11
0
.medi
um,
.only.a.singl
e
.type.of.
tran
sceiver
.ASIC.is.avai
lable.
.e.use.of.the.RF.and.IP.medi
a
.does.not.requ
ire
.hard
ware
.that.is.spec
i-
cally
.desi
gned
.for.KNX
.
To
.furt
her
.ease.syst
em
.deve
lopment
.and.cert
ication,
.KNX.den
es
.stan
dardized
.comm
unication
.
modu
les
.(i.e
.,
.bus.atta
chment
.unit
s,
.BAUs
)
.such.as.the.bus.coup
ling
.unit.(BCU
),
.the.bus.inte
rface
.mod-
u
le
.(BIM
),
.or.the.powe
rline
.inte
rface
.modu
le
.(PIM
),
.whic
h
.prov
ide
.an.impl
ementation
.of.the.comp
lete
.
netw
ork
.stac
k
.and.appl
ication
.envi
ronment.
.ey.can.host.simpl
e
.user.appl
ications,
.supp
orting
.the.use.
of.GOs.in.a.way.simil
ar
.to.loca
l
.vari
ables.
.BIMs
/PIMs
.are.sold
ered
.or.deta
chable
.comm
unication
.mod-
u
les
.that.are.dire
ctly
.atta
ched
.to.the.main.devi
ce
.circ
uit
.boar
d
.wher
eas
.BCUs.are.equi
pped
.with.housi
ng
.
and.shi
elding
.aga
inst
.ele
ctromagnetic
.int
erference.
Most
.KNX.devices.come.either.in.rail-mount.housings.for.mounting.in.distribution.boxes.or.as.ush-
mount
.devi
ces.
.Flus
h-mount
.end.devi
ces
.base
d
.on.BCUs.are.typi
cally
.spli
t
.into.two.part
s,
.the.com-
m
unication
.modu
le
.(i.e
.,
.BCU).and.the.appl
ication
.modu
le.
.Both.are.conn
ected
.via.the.stan
dardized
.
physi
cal
.exte
rnal
.inte
rface
.(PEI
),
.whic
h
.can.be.con
gured
.in.a.numbe
r
.of.ways
.
.Simp
le
.appl
ication
.mod-
u
les
.such.as.wall.swit
ches
.may.use.it.for.para
llel
.digi
tal
.I/O.or.as.inpu
ts
.to.the.BCU.A/D.conv
erter.
.More.
comp
lex
.user.appl
ications
.requ
iring
.the.use.of.a.sepa
rate
.micr
oprocessor
.may.use.the.PEI.for.high
-level
.
acce
ss
.to.the.netw
ork
.stac
k
.via.EMI.wrap
ped
.in.an.asyn
chronous
.seri
al
.proto
col
.(BCU.1.devi
ces
.use.
a.proto
col
.with.prop
rietary
.hard
ware
.hand
shaking,
.whil
e
.the.proto
col
.supp
orted
.by.BCU.2.devi
ces
.is.
base
d
.on.FT1
.2
.as.spe
cied
.in.IEC.608
70-5).
Dierent
. gene
rations
. of. TP1. comm
unication
. modu
les
. exis
t.
. e. trad
itional
. BCU. 1,. BIM. M111
,
.
and.BIM.M115.modu
les
.feat
ure
.a.Motor
ola
.68HC
05B6
.or.comp
atible
.type.micr
ocontroller
.runn
ing
.
at.2.MHz.with.176.byte
s
.RAM,.256.byte
s
.EEPR
OM,
.and.5936.byte
s
.ROM..BCU.2.and.BIM.M113.use.a.
68HC
05BE12
.micr
ocontroller
.runn
ing
.at.2.45
76
.MHz..ey.have.384.byte
s
.RAM,.991.byte
s
.EEPR
OM,
.
and.1190
4
.byte
s
.ROM..Most.of.the.RAM.and.ROM.are.occu
pied
.by.the.syst
em
.sow
are.
.To.over
come
.
the.seve
re
.perf
ormance
.limi
tations
.of.thes
e
.out-
dated
.plat
forms,
.a.new.gene
ration
.of.BIMs.has.been.
deve
loped.
.ey.are.base
d
.on.the.NEC.78K0
/Kx2
.micr
ocontroller
.and.oer.from.8.up.to.48.kB.ash.
memory..Additionally,.a.far.more.comfortable.soware.development.toolchain.(including.a.C.compiler.
and.debu
gger)
.is.avai
lable
.for.this.new.plat
form.
.For.PL11
0,
.68HC
05B16
.micr
ocontroller
.base
d
.BAUs.
(e.g
.,
.PIMs
)
.exis
t
.that.are.quit
e
.simil
ar
.to.the.68HC
05B6
.seri
es
.but.feat
ure
.larg
er
.ROM.and.RAM.and.a.
cloc
k
.fre
quency
.of.4.MHz.
A
part
.from.thes
e
.stan
dardized
.BAUs
,
.vari
ous
.othe
r
.KNX.cert
ied
.inte
rface
.modu
les
.exis
t.
.For.exam
-
ple,
.so-c
alled
.seri
al
.inte
rface
.modu
les
.(SIM
s)
.are.avai
lable,
.whic
h
.can.be.dire
ctly
.sold
ered
.to.prin
ted
.
circ
uit
.boar
ds
.in.a.way.simil
ar
.to.BIMs
.
.ey.cont
ain
.the.comp
lete
.comm
unication
.stac
k
.and.the.appl
i-
cation
.can.inte
rface
.with.the.KNX.netw
ork
.using.a.simpl
e,
.prop
rietary
.seri
al
.proto
col.
.Comp
lete
.so-
w
are
.stac
ks
.for.seve
ral
.micr
ocontroller
.fami
lies
.(e.g
.,
.Atme
l
.ATme
ga
.and.ARM7
,
.Texa
s
.Inst
ruments
.
MSP4
30,
.NEC.78K
0)
.can.als
o
.be.obt
ained
.fro
m
.var
ious
.ven
dors.
© 2011 by Taylor and Francis Group, LLC
42-12 Industrial Communication Systems
42.6 Conguration
In. KNX,. considerable. attention. is. given. to. uniform,. manufacturer-independent. conguration,.
para
meterization,
.and.bind
ing.
.is.is.refe
rred
.to.as.con
guration interworking.
.Cent
ral
.to.the.KNX.
con
guration
.inte
rworking
.conc
ept
.is.a.sing
le,
.univ
ersal
.PC.sow
are
.pack
age
.for.plan
ning
.and.com-
m
issioning
.KNX.inst
allations.
.It.is.main
tained
.and.sold.by.the.KNX.Asso
ciation,
.base
d
.on.Micr
oso
.
Wind
ows
.and.call
ed
.ETS.(Eng
ineering
.Tool.Sow
are).
.ETS.assi
sts
.with.den
ing
.the.proje
ct
.in.a.stru
c-
tured
.way.and.is.used.to.con
gure
.the.beha
vior
.and.comm
unication
.rela
tionships
.of.KNX.devi
ces.
.
is.incl
udes
.load
ing
.appl
ication
.prog
rams
.and.sett
ing
.appl
ication
.para
meters
.and.can.be.done.over.
the.netw
ork
.or.the.PEI,.if.avai
lable.
.ETS.also.prov
ides
.bus.moni
toring
.func
tions
.for.trou
bleshooting.
Manufacturers
.are.requ
ired
.to.supp
ly
.the.nece
ssary
.devi
ce
.and.user
-application
.desc
riptions
.alon
g
.
with.thei
r
.hard
ware.
.Tool
s
.for.thei
r
.crea
tion
.are.prov
ided
.by.the.KNX.Asso
ciation
.as.well
.
.ETS.can.also.
be.exte
nded
.by.way.of.plug
-ins,
.shou
ld
.the.con
guration
.of.a.devi
ce
.requ
ire
.it..Only.a.mino
r
.numbe
r
.of.
devi
ces
.need.furt
her
.setu
p
.tools.in.addi
tion
.to.ETS..For.inte
racting
.with.such.exte
rnal
.tools
,
.ETS.sup-
p
orts
.the.exp
ort
.of.pro
ject
.le
s.
For
.acce
ssing
.the.con
gurable
.reso
urces
.with
in
.KNX.devi
ces,
.both.a.memo
ry-mapped
.appr
oach
.and.
a.more.tran
sparent
.objec
t/property-oriented
.mode
l
.are.den
ed.
.e.reso
urces
.them
selves
.(e.g
.,
.memo
ry
.
loca
tions,
.prop
erty
.iden
tiers,
.and.thei
r
.purp
ose)
.are.also.stan
dardized
.as.far.as.the.comm
unication
.
syst
em
.is.conc
erned.
.e.mana
gement procedures
.appl
icable
.for.a.part
icular
.devi
ce
.and.its.reso
urce
.lay-
o
ut
.are.spec
ied
.by.the.devi
ce
.pro
le
.it.conf
orms
.to..Acce
ss
.to.the.user.appl
ication
.stil
l
.larg
ely
.requ
ires
.
ETS.and.the.dev
ice
.man
ufacturers’
.des
criptions.
Increasingly,
.KNX.devices.that.do.not.require.ETS.for.commissioning.are.available..is.is.referred.
to.as.E-Mo
de
.(for.“Eas
y”),
.whil
e
.con
guration
.via.ETS.is.call
ed
.S-Mo
de
.(for.“Sys
tem”).
.A.vari
ety
.of.
E-Mo
des
.exis
ts.
.eir.aim.is.to.prov
ide
.inst
allers
.with.easie
r
.and.less.erro
r-prone
.(alb
eit
.less.powe
rful
.
and.exi
ble)
.ways.of.crea
ting
.comm
unication
.bind
ings.
.is.can.be.acco
mplished
.by.loca
lly
.brin
ging
.
the.bind
ing
.part
ners
.(and.only.them
)
.into.a.spec
ial
.con
guration
.mode.(pus
h
.butto
n
.mode
),
.sett
ing
.
tag.numbe
rs
.on.devi
ces
.that.are.to.coop
erate
.to.iden
tical
.valu
es
.(LTE.mode
),
.or.a.hand
-held,
.dedi
cated
.
con
guration
.tool.that.enum
erates
.possi
ble
.bind
ing
.part
ners
.(con
troller
.mode
).
.Whil
e
.in.S-Mo
de,
.GOs.
are.boun
d
.indi
vidually,
.E-Mo
des
.usua
lly
.perf
orm
.bind
ing
.for.a.grou
p
.of.logi
cally
.corr
esponding
.GOs.
(ref
erred
.to.as.cha
nnels)
.toge
ther.
Although
.the.abil
ity
.to.be.con
gured
.with.ETS.is.a.cert
ication
.requ
irement
.for.all.KNX.devi
ces,
.
this.requ
irement
.is.temp
orarily
.susp
ended
.since.ETS.does.not.yet.supp
ort
.E-Mo
de
.devi
ces.
.A.furt
her
.
con
guration
.mod
e
.(A-
Mode)
.was.als
o
.par
t
.of.the.KNX.sta
ndard,
.but.was.rem
oved
.fro
m
.rel
ease
.2.0
.
42.7 Conclusion and Outlook
When.the.convergence.process.between.EIB,.Batibus,.and.EHS.started.in.1997,.EIB.was.assigned.
a.lead
ing
.role
:
.It.was.to.be.enha
nced
.by.feat
ures
.that.were.pres
ent
.in.EHS.and.Bati
bus
.but.not.yet.
in.EIB..In.2002
,
.a.new.stan
dard
.emer
ged
.as.a.resu
lt,
.atte
mpting
.to.brid
ge
.thre
e
.die
rent
.doma
ins
.
by.the.comb
ination
.of.thre
e
.tech
nologies:
.elec
trical
.inst
allation
.(lig
hting/shading)
.via.EIB,.HVAC.
via.Bati
bus,
.and.hous
ehold
.appl
iances
.(whi
te
.good
s)
.via.EHS..is.stan
dard
.was.late
r
.labe
led
.KNX..
EIB.devi
ces
.were.auto
matically
.KNX.comp
liant;
.this.was.not.the.case.for.Bati
bus
.and.EHS.devi
ces,
.
howe
ver.
.Toda
y,
.Bati
bus
.and.EHS.heri
tage
.has.larg
ely
.been.elim
inated
.from.KNX.sinc
e
.no.KNX.
prod
ucts
.base
d
.on. thes
e
.part
s
.of.the. stan
dard
.were.made.avai
lable
.comm
ercially.
.EHS.1.3a. has.
beco
me
.a.KNX-
associated
.stan
dard,
.but.the.prod
ucts
.on.the.mark
et
.that.are.base
d
.on.it.are.not.
KNX.comp
atible.
Nevertheless,
.the. KNX. stan
dard
.has. been. stea
dily
.impr
oved
.and. augm
ented.
.e.most. visi
ble
.
impr
ovements
.over.EIB.are.its.RF.medi
um,
.the.IP.tunn
eling
.prot
ocol,
.new.con
guration
.mode
s
.that.
do.not.requ
ire
.ETS,.and.the.addi
tion
.of.mete
ring
.as.well.as.full
-edged
.HVAC.cont
rol
.for.home.
as.well.as.ligh
t
.comm
ercial
.envi
ronments.
.Howe
ver,
.the.func
tions
.adde
d
.for.the.HVAC.trad
e
.are.
© 2011 by Taylor and Francis Group, LLC
KNX 42-13
not.fully.and.seamlessly.integrated.with.those.that.have.grown.from.the.electrical.trade..As.a.con-
sequence
.fro
m
.the
se
.dev
elopments,
.the.KNX.spe
cication
.has.bec
ome
.com
plex
.to.rea
d,
.alt
hough
.
con
siderable
.eo
rts
.tow
ard
.con
solidation
.wer
e
.tak
en
.for.the.cur
rent
.rel
ease
.of.the.KNX.mas
ter
.spe
ci-
cation
.(KNX
Handbook
.2.0
).
Nevertheless,
.the
re
.is.amp
le
.roo
m
.for.fur
ther
.act
ivities:
.Ope
n
.and.sta
ble
.for
mats
.for.the.des
cription
.
of.pro
duct
.con
guration
.dat
a
.(us
er
.app
lication
.res
ources)
.and.pro
ject
.spe
cic
.dat
a
.are.sti
ll
.mis
sing,
.
alt
hough
.an.XML
-based
.pro
posal
.has.bee
n
.in.its.dra
.sta
ge
.for.yea
rs
.and.the.upc
oming
.ETS.ver
sion
.
4.stor
es
.pr
oject
.an
d
.pr
oduct
.da
ta
.in.XM
L.
.E
orts
.sh
ould
.al
so
.be.di
rected
.in
to
.a.We
b
.se
rvices
.ma
pping.
.
Whi
le
.pro
tocol
.sec
urity
.is.slo
wly
.bei
ng
.add
ressed
.by.man
ufacturers,
.saf
ety
.iss
ues
.hav
e
.not.bee
n
.tak
en
.
into.ac
count
.so.fa
r.
abbreviations
AL. Application.layer
APDU
. App
lication
.la
yer
.pr
otocol
.da
ta
.un
it
AT
. Add
ress
.ty
pe
BAU
. Bus.at
tachment
.un
it
BCU
. Bus.co
upling
.un
it
BIM
. Bus.in
terface
.mo
dule
cEMI
. Com
mon
.ex
ternal
.me
ssage
.in
terface
DL
. Dat
a
.li
nk
.la
yer
DPT
. Dat
a
.po
int
.ty
pe
EIB
. Eur
opean
.In
stallation
.Bu
s
EMI
. Ext
ernal
.me
ssage
.in
terface
ETS
. Eng
ineering
.too
l
.so
ware
FB
. Fun
ctional
.bl
ock
FCS
. Fra
me
.ch
ecking
.se
quence
GO
. Gro
up
.ob
ject
IP
. Int
ernet
.pr
otocol
LTE
. Log
ical
.ta
g
.ex
tended
NL
. Net
work
.la
yer
PDU
. Pro
tocol
.da
ta
.un
it
PIM
. Powerline.interface.module
PL110
. Pow
erline
.11
0
RF
. Rad
io
.fr
equency
SAP
. Ser
vice
.ac
cess
.po
int
TL
. Tra
nsport
.la
yer
TP1
. Twi
sted
.Pa
ir
.1
TP
DU
. Tra
nsport
.la
yer
.pr
otocol
.da
ta
.un
it
references
. 1.. KNX Specications, Version 2.0,.KNX.Association,.Diegem,.Belgium,.2009.
. 2.. EN.50090,.Hom
e
.and.buildin
g
.elec
tronic
.system
s
.(HBES),.CENELEC,.Bru
ssels,
.Belg
ium,
.1994–2009.
. 3.. EN. 133
21-1,
. Ope
n
. dat
a
. com
munication
. in. bui
lding
. aut
omation,
. con
trols
. and. bui
lding
.
man
agement—Home
.and.buildin
g
.elec
tronic
.system—P
art
.1:.Pro
duct
.and.system.req
uirements,
.
CEN,.Br
ussels,
.Be
lgium,
.2006.
. 4.. EN. 133
21-2,
. Ope
n
. dat
a
. com
munication
. in. bui
lding
. aut
omation,
. con
trols
. and. bui
lding
.
man
agement—Home
.and.buildin
g
.elec
tronic
.system
s—Part
.2:.KNXnet/IP.communic
ation,
.CEN,.
Bru
ssels,
.Be
lgium,
.2006.
© 2011 by Taylor and Francis Group, LLC
42-14 Industrial Communication Systems
. 5.. ISO/IEC.14543-3,.Information.technology—Home.electronic.system.(HES).architecture—Part.3,.
ISO/IEC,.Gen
eva,
.Sw
itzerland,
.2006–2007.
. 6.. Han
dbook for Home and Building Control, Basic Principles,
.5th. edn.,. ZVEI/ZVEH. (eds.),. KNX.
Ass
ociation,
.Diegem,.Be
lgium,
.2006.
. 7.. W..Kas
tner
.and.G..Neugsc
hwandtner,
.EIB:.Euro
pean
.Ins
tallation
.Bus,.in.Ind
ustrial Communication
Technology Handbook,
.CRC.Pr
ess,
.Bo
ca
.Ra
ton,
.FL,.2005.
. 8.. ERC.reco
mmendation
.70-03.rel
ating
.to.the.use.of.sho
rt
.rang
e
.devices.(SRD),.CEPT,.Euro
pean
.
Comm
unications
.Oce,.Co
penhagen,
.Denm
ark,
.1997–2010.
. 9.. EN. 13757,. Comm
unication
. system
s
. for. meter
s
. and. remo
te
. readin
g
. of. meter
s,
. CEN,. Bru
ssels,
.
Belg
ium,
.2002–2008.
. 10.. EN. 50065-1,. Spe
cication
.for.signa
lling
.on.low-vo
ltage
.elec
trical
.inst
allations
.in.the. fre
quency
.
rang
e
.3.kHz.to.148.5.kHz..Genera
l
.req
uirements,
.fre
quency
.ban
ds
.and.elec
tromagnetic
.dist
ur-
bances,
.CENELEC,.Br
ussels,
.Be
lgium,
.2001.
. 11.. EN.50523,.Ho
usehold
.ap
pliances
.int
erworking,
.CENELEC,.Br
ussels,
.Be
lgium,
.2009.
. 12.. IEC.60870-5-1,.Tele
control
.equi
pment
.and.system
s.
.Par
t
.5:.Tran
smission
.pro
tocols—Section
.1:.
Tran
smission
.fra
me
.fo
rmats,
.IEC,.Gen
eva,
.Sw
itzerland,
.1990.
. 13.. IEC.60870-5-2,. Tele
control
.equi
pment
.and.system
s.
.Par
t
.5:.Tran
smission
.pro
tocols—Section
.2:.
Link.tra
nsmission
.pr
ocedures,
.IEC,.Gen
eva,
.Sw
itzerland,
.1992.
© 2011 by Taylor and Francis Group, LLC
43-1
43.1 Introduction
Time-triggered.systems.derive.control.by.the.progression.of.time.and.thus.use.the.concept.of.time.in.
the.prob
lem
.stat
ement
.as.well.as.in.the.prov
ided
.solu
tion.
.is.appr
oach
.supp
orts
.a.spec
ication
.of.
inte
rfaces
.incl
uding
.the.temp
oral
.doma
in
.(e.g
.,
.send.and.rece
ive
.inst
ants
.of.mess
ages)
.and.the.impl
e-
mentation
.of.“tem
poral
.rew
alls,”
.whic
h
.prev
ent
.erro
r
.prop
agation
.via.cont
rol
.signa
ls.
.Time
-triggered
.
syst
ems
.sup
port
.memb
ership
.ide
ntication,
.int
eroperability,
.and.rep
lica
.det
erminism.
e
.conc
epts
.of.time
-triggered
.syst
ems
.have.been.comp
osed
.in.the.time
-triggered architecture
.[KB0
3],
.
esta
blishing
.a.fram
ework
.for.the.impl
ementation
.of.depe
ndable
.dist
ributed
.real
-time
.embed
ded
.appl
i-
cations.
.Besid
es
.proto
cols
.that.empl
oy
.a.time
-triggered
.sche
duling
.like.Flex
ray
.[Fle
05]
.and.TT-C
AN
.
[HMF
H00],
.ther
e
.exis
t
.thre
e
.proto
cols
.that.are.espe
cially
.desig
ned
.acco
rding
.to.the.time
-triggered
.
arch
itecture:
.time
-triggered
.proto
col
.(TTP
),
.time
-triggered
.Ether
net
.(TTEt
hernet),
.and.TTP.for.SAE.
Clas
s
.A.[SA
E95a]
.app
lications
.(TT
P/A).
e
. TTP. (als
o
. know
n
. as. TTP/
C
. proto
col
. since. it. suit
es
. SAE. clas
s
. C. appl
ication
. requ
irements
.
[SAE9
5b])
.prov
ides
.a.high
ly
.depe
ndable
.real
-time
.comm
unication
.serv
ice
.with.a.faul
t-tolerant
.cloc
k
.
sync
hronization
.and.membe
rship
.serv
ice.
.TTP.is.suit
able
.for.X-by-
wire
.syst
ems
.in.the.autom
otive
.and.
avio
nics
.dom
ain.
43
Protocols of the
Time-Triggered
Architecture: TTP,
TTEthernet, TTP/A
43.1. Introduction.....................................................................................43-1
43.2
. e.Tim
e-Triggered
.Par
adigm......................................................43-2
Sparse.Time. •. Flow.Control.and.Temporal.Firewall
43.3. Time-Triggered.Communication..................................................43-3
43.4
. Time
-Triggered
.Pro
tocol
.(TT
P)....................................................43-4
Fault.Hypothesis.and.Fault.Handling. •. Fault.Tolerance. •. .
Membership
43.5. Time-Triggered.Ethernet................................................................43-5
Principles.of.Operation. •. Time.Format. •. Periods. •. Fault-Tolerant.
TTEthernet.Conguration. •. Clock.Synchronization
43.6. TTP/A................................................................................................43-7
Interface.File.System. •. e.ree.Interfaces.of.a.Smart.
Transducer. •. Principles.of.Operation
Acknowledgments.....................................................................................43-11
References...................................................................................................43-11
Wilfried Elmenreich
University of Klagenfurt
Christian
El-Salloum
Vienna University
of Tec
hnology
© 2011 by Taylor and Francis Group, LLC

43-2 Industrial Communication Systems
TTEthernet. is. a. uniform. communication. architecture. covering. a.whole. spectrum. of. distributed.
applications.reaching.from.simple.non-real-time.applications.to.multimedia.systems.up.to.the.most.
demanding.safety-critical.hard.real-time.products.
e
.time-triggered.eldbus.TTP/A.is.intended.for.the.integration.of.smart.transducers.in.all.types.
of.distributed.real-time.control.systems..Although.the.rst.targets.are.automotive.applications,.TTP/A.
has.been.designed.to.meet.the.requirements.of.process.control.systems.as.well..TTP/A.supports.low-cost.
implementations.on.a.wide.set.of.available.component-o-the-shelf.microcontrollers.
In
.this.chapter,.we.introduce.these.protocols.by.rst.giving.a.short.overview.on.the.common.under-
lying
.concepts.of. the.time-triggered.architecture..A. reader. that.is.familiar. with.the. time-triggered.
paradigm.may.directly.go.to.the.sections.on.TTP,.TTEthernet.and.TTP/A,.where.we.introduce.the.
application.domains,.requirements,.and.principles.of.operation.of.the.specic.protocols.
43.2 the time-triggered Paradigm
e.time-triggered.paradigm.encompasses.a.set.of.concepts.and.principles.that.support.the.design.
of.highly.dependable.hard.real-time.systems.
43.2.1 Sparse time
When.global.physical.time.is.used.to.deduce.causality.of.distributed.events,.it.is.necessary.to.synchro-
nize
.the.local.clocks.precisely..Clock.synchronization.is.concerned.with.bringing.the.time.of.clocks.in.a.
distributed.network.into.close.relation.with.respect.to.each.other..Measures.of.the.quality.of.clock.syn-
chronization
.are.precision.and.accuracy..Precision.is.dened.as.the.maximum.oset.between.any.two.
clocks.in.the.network.during.an.interval.of.interest..Accuracy.is.dened.as.the.maximum.oset.between.
any.clock.and.an.absolute.reference.time.
Due
.to.the.impossibility.to.perfectly.synchronize.clocks.and.the.digitalization.error,.it.is.impossible.
to.guarantee.that.two.observations.of.the.same.event.will.yield.the.same.timestamp..A.solution.to.this.
problem.is.provided.by.introducing.the.concept.of.a.sparse time base.[Kop92]..In.this.model,.the.timeline.
is.partitioned.into.an.innite.sequence.of.alternating.intervals.of.activity.and.silence..Figure.43.1.depicts.
the.intervals.of.silence.(s).and.activity.(a)..e.duration.of.the.silence.intervals.depends.on.the.precision.
of.the.clock.synchronization.
e
.architecture.must.ensure.that.signicant.events,.such.as.the.sending.of.a.message.or.the.obser-
vation
.of.an.event,.occur.only.during.an.interval.of.activity..Events.occurring.during.the.same.seg-
ment
.of.activity.are.considered.to.have.happened.at.the.same.time..Events.that.are.separated.by.at.least.
one.segment.of.silence.can.be.consistently.assigned.to.dierent.timestamps.for.all.clocks.in.the.system.
43.2.2 Flow Control and temporal Firewall
In.order.to.transfer.data.between.two.components,.they.must.agree.on.the.ow-control.mechanism.to.
use.and.the.direction.of.the.transfer..Commonly,.a.communication.between.two.subsystems.is.either.
controlled.by.the.sender’s.request.(push.style).or.by.the.receiver’s.request.(pull.style).[AFI+00].
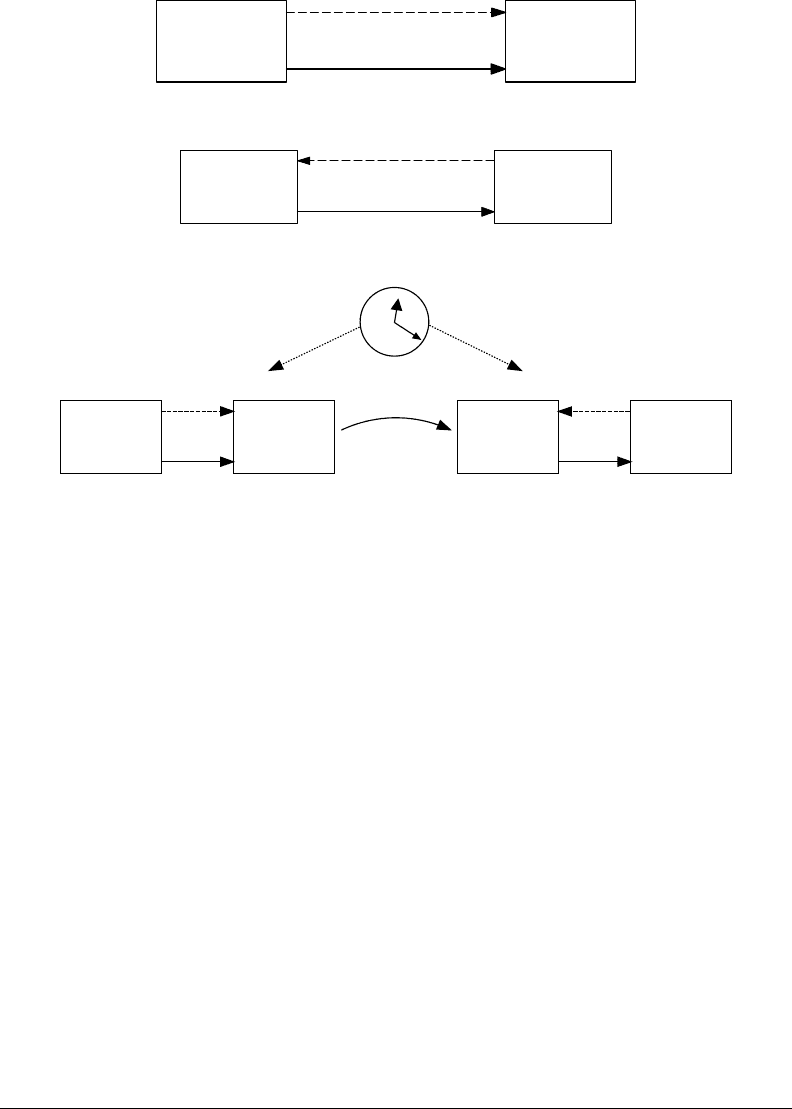
Figure
.43.2.shows.the.push.method..e.producer.is.allowed.to.generate.and.send.its.message.at.any.
time,.thus.ow.control.is.managed.by.the.producer..is.method.is.very.comfortable.for.the.push.pro-
ducer,
.but.the.push.consumer.has.to.be.watchful.for.incoming.data.messages.at.any.time,.which.may.
a
s s
a a
Real time
FIGURE 43.1 Sparse.time.base.
© 2011 by Taylor and Francis Group, LLC
Protocols of the Time-Triggered Architecture: TTP, TTEthernet, TTP/A 43-3
result.in.high.resource.costs.and.dicult.scheduling.[EHK01]..Popular.“push”.mechanisms.are.mes-
sages,
.interrupts,.or.writing.to.a.le.[DeL99]..e.push.style.communication.is.the.basic.mechanism.of.
event-triggered.systems.
In
.Figure.43.3,.the.ow.control.is.on.the.consumer..Whenever.the.consumer.asks.to.access.the.mes-
sage
.information,.the.producer.has.to.respond.on.the.request..is.facilitates.the.task.for.the.pull.con-
sumer,
.but.the.pull.producer.has.now.to.be.watchful.for.incoming.data.requests.[EHK01]..Popular.“pull”.
mechanisms.are.reading.a.le,.polling,.state.messages,.or.shared.variables.[DeL99]..e.pull-style.com-
munication
.is.the.basic.mechanism.of.client-server.systems..e.time-triggered.paradigm.implements.a.
hybrid.approach,.which.is.explained.in.Figure.43.4.
A
.temporal.rewall.[KN97].enables.dierent.control.ow.directions.between.sender.and.receiver.
(Figure.43.4).
is
.model.uses.a.combination.of.“push”.and.“pull”.communication..Each.component.possesses.
a.memory.object.that.acts.as.a.data.source.and.sink.for.communication.activities..Components.that.
want.to.submit.data.are.able.to.write.the.data.into.this.memory.using.a.producer’s push.interface..e.
transmission.of.data.between.the.sender.and.the.receiver.is.handled.autonomously.by.the.communica-
tion
.subsystem.according.to.the.time-triggered.paradigm..Aer.transmission,.the.consumer.component.
accesses.the.data.using.a.consumer’s pull.interface.
e
.values.in.the.memory.are.state.messages.that.keep.their.content.until.they.are.updated.and.overwritten..
Since.in.the.time-triggered.architecture.all.nodes.have.knowledge.about.transmission.schedules.and.access.to.
a.global.time.base,.the.instant.when.the.protocol.updates.a.value.in.the.memory.element.is.known.to.all.nodes.
43.3 time-triggered Communication
e.very.basic.principle.of.time-triggered.communication.is.that.the.events.of.message.transmission.
depend.only.on.the.progression.of.time.and.not.on.the.availability.of.new.information..erefore,.time-
triggered
.communication.requires.a.sucient.synchronization.among.all.nodes’.clocks.
Sender
Receiver
Control
ow
Data
ow
FIGURE 43.2 Push.communication.model.(implicit.ow.control).
Sender Receiver
Control
flow
Data
flow
FIGURE 43.3 Pull.communication.model.(explicit.ow.control).
Control
ow
Control
ow
Sender
Memory
Data
ow
Receiver
Memory
Data
ow
Time-triggered
communication system
Information push
ideal for sender
Information pull
ideal for sender
FIGURE 43.4 Temporal.rewall.
© 2011 by Taylor and Francis Group, LLC
43-4 Industrial Communication Systems
e.instants.at.which.information.is.delivered.or.received.are.a.priori.dened.and.known.by.all.nodes.
of.a.cluster..Any.node-local.scheduling.strategy.that.will.satisfy.the.known.deadlines.is.“t.for.purpose.”.
It.is.the.responsibility.of.the.time-triggered.communication.service.to.transport.the.information.from.
the.temporal.rewall.of.the.sending.node.to.the.temporal.rewall.of.the.receiving.node.within.the.inter-
val
.delimited.by.these.a.priori.known.fetch.and.delivery.instants.
43.4 time-triggered Protocol (ttP)
e.TTP.[TTA03].is.a.fault-tolerant.protocol.providing
•
. Autonomous.fault-tolerant.message.transport.at.known.times.and.with.minimal.jitter.between.
the.nodes.of.a.cluster.by.employing.a.time.division.multiple.access.(TDMA).strategy.on.replicated.
communication.channels
•
. Fault-tolerant.clock.synchronization.that.establishes.a.global.time.base.without.relying.on.a.cen-
tral
.time.server
•
. A.membership.service.to.inform.every.correct.node.about.the.consistency.of.data.transmission..
is.service.can.be.viewed.as.a.distributed.acknowledgment.service.that.informs.the.application.
promptly.if.an.error.in.the.communication.system.has.occurred
•
. Clique.avoidance.[BP00].to.detect.faults.outside.the.fault.hypothesis,.which.cannot.be.tolerated.
at.the.protocol.level
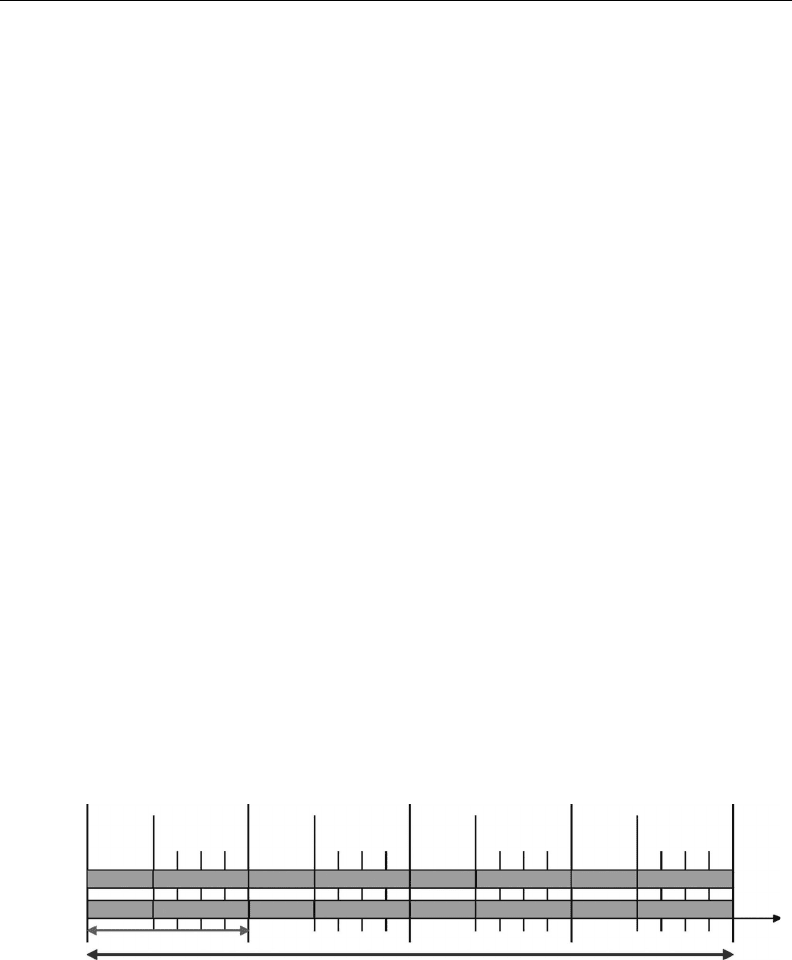
In
.TTP,.communication.is.organized.into.TDMA.rounds.as.depicted.in.Figure.43.5..A.TDMA.round.
is.divided.into.slots..Each.node.in.the.communication.system.has.its.sending.slot.and.must.send.
frames.in.every.round..e.frame.size.allocated.to.a.node.can.vary.from.2.to.240.bytes.in.length,.each.
frame.usually.carrying.several.messages..e.cluster.cycle.is.a.recurring.sequence.of.TDMA.rounds;.
in.dierent.rounds.dierent.messages.can.be.transmitted.in.the.frames,.but.in.each.cluster.cycle.the.
complete.set.of.state.messages.is.repeated..e.data.are.protected.by.a.24.bit.cyclic.redundancy.check.
(CRC)..e.schedule.is.stored.in.the.message.descriptor.list.(MEDL).within.the.communication.con-
troller
.of.each.node.
e
.clock.synchronization.is.necessary.to.provide.all.nodes.with.an.equivalent.time.concept..In.doing.
so,.it.makes.use.of.the.common.knowledge.of.the.send.schedule..Each.node.measures.the.dierence.
between.the.a.priori.known.expected.and.the.observed.arrival.time.of.a.correct.message.to.learn.about.
the.dierence.between.the.sender’s.clock.and.the.receiver’s.clock..A.fault-tolerant.average.algorithm.
needs.this.information.to.periodically.calculate.a.correction.term.for.the.local.clock,.so.that.the.clock.is.
kept.in.synchrony.with.all.other.clocks.of.the.cluster..e.membership.service.uses.a.distributed.agree-
ment
.algorithm.to.determine.whether,.in.case.of.a.failure,.the.outgoing.link.of.the.sender.or.the.incom-
ing
.link.of.the.receiver.has.failed.
e
.core.algorithms.of.TTP.have.been.formally.veried.to.prove.their.correctness..Particular.control-
ler
.hardware.has.been.tested.with.multimillion.fault.injection.and.heavy.ion.radiation.experiments.and.
experiments.with.electromagnetic.interferences.have.been.carried.out.successfully.
Node A
m1,m2,m3 m1,m6,m8
m1,m6,m8
m1,m2
m1,m2,m4
m1,m5,m6
m1,m5,m6m1,m2,m3
Channel A
Channel B
TDMA round
Cluster cycle
Time
Node A Node A Node AOther slots Other slots Other slots Other slots
FIGURE 43.5 Frames,.messages,.slots,.TDMA.round,.and.cluster.cycle.in.TTP.communication.
© 2011 by Taylor and Francis Group, LLC

Protocols of the Time-Triggered Architecture: TTP, TTEthernet, TTP/A 43-5
43.4.1 Fault Hypothesis and Fault Handling
Provided.that.the.components.of.a.properly.congured.TTP-based.system.are.in.dierent.fault.contain-
ment
.regi
ons,
.each.can.fail.in.an.arbi
trary
.way..Unde
r
.this.assu
mption,
.the.prob
ability
.of.two.conc
ur-
rent
.inde
pendent
.comp
onent
.fail
ures
.is.smal
l
.enou
gh
.to.be.consi
dered
.a.rare.even
t
.that.can.be.hand
led
.
by.an.app
ropriate
.nev
er-give-up
.(NG
U)
.str
ategy
.[TT
A03,
.p..27]
.
As
.for.hard
ware
.faul
ts,
.TTP.is.desig
ned
.to.isol
ate
.and.toler
ate
.singl
e-node
.faul
ts.
.By.intr
oducing
.a.
bus.guar
dian,
.it.is.guar
anteed
.that.a.faul
ty
.node.cann
ot
.prev
ent
.corr
ect
.node
s
.from.exch
anging
.data
.
.
e.bus.guar
dian
.ensu
res
.that.a.node.can.only.send.once.in.a.TDMA.roun
d,
.ther
eby
.elim
inating
.the.
prob
lem
.of.bab
bling
.idi
ots
.tha
t
.mon
opolize
.the.com
munication
.med
ium.
43.4.2 Fault tolerance
e.mechanisms.described.above.ensure.fault.tolerance.at.the.communication.subsystem.level.in.TTP..
ese.mech
anisms
.of.the.comm
unication
.subs
ystem
.guar
antee
.that.faul
ty
.node
s
.cann
ot
.prev
ent
.cor-
r
ect
.node
s
.from.comm
unicating
.and.serv
e
.as.a.comm
unication
.plat
form
.for.the.appl
ication.
.At.the.
appl
ication
.leve
l,
.faul
t
.toler
ance
.need
s
.to.be.impl
emented
.by.a.faul
t-tolerance
.laye
r
.and.an.appr
opriate
.
appl
ication
.desig
n.
.Faul
t
.toler
ance
.can.be.real
ized
.by.repl
icating
.a.sow
are
.subs
ystem
.on.two.fail-
silent
.
node
s.
.Tole
rance
.of.a.singl
e
.arbi
trary node failure
.can.be.ensu
red
.by.trip
le
.modu
lar
.redu
ndancy
.(TMR
)
.
voti
ng.
.Both.mech
anisms
.will.toler
ate
.singl
e-component
.faul
ts
.with.the.resp
ective
.fail
ure
.sema
ntics
.
and.are.thu
s
.t.to.han
dle
.bot
h
.tra
nsient
.and.per
manent
.har
dware
.fau
lts.
43.4.3 Membership
A.major.objective.in.the.design.of.TTP.is.that.the.protocol.should.transmit.data.consistently.to.all.cor-
rect
.node
s
.of.the.dist
ributed
.syst
em
.and.that
,
.in.case.of.a.fail
ure,
.the.comm
unication
.syst
em
.shou
ld
.
deci
de
.on.its.own.whic
h
.node.is.faul
ty.
.ese.prop
erties
.are.achi
eved
.by.the.membe
rship
.proto
col
.and.
an.ack
nowledgment
.mec
hanism.
Each
.node.of.a.TTP-b
ased
.clus
ter
.main
tains
.a.membe
rship
.list.with.all.node
s
.that.are.consi
dered
.
to.be.corr
ect.
.is.info
rmation
.is.upda
ted
.loca
lly
.in.acco
rdance
.with.succ
essful
.(or.unsu
ccessful)
.data.
tran
smissions
.and.thus.ree
cts
.the.loca
l
.view.of.the.rece
iving
.node.on.all.othe
r
.node
s.
.With.each.tran
s-
mission,
.each.rece
iver
.sees.and.chec
ks
.the.send
er’s
.membe
rship
.that.is.incl
uded
.in.the.send
er’s
.tran
s-
mission
.or.hid
den
.in.the.CRC.cal
culation.
An
.inco
nsistent
.view.on.the.membe
rship
.can.only.be.caus
ed
.by.faul
ts
.exce
eding
.the.faul
t
.hypo
thesis
.
(e.g
.,
.mult
iple
.conc
urrent
.faul
ts
.due.to.heav
y
.elec
tromagnetic
.inte
rference).
.In.this.case
,
.a.cliq
ue
.avoi
d-
ance
.mech
anism
.esta
blishes
.consi
stency
.by.rest
arting
.the.node
s
.whic
h
.have.inco
nsistent
.view.with.the.
major
ity
.of.nod
es.
43.5 time-triggered Ethernet
TTEthernet.is.a.uniform.communication.architecture.covering.the.whole.spectrum.of.real-time.appli-
cations
.[KAG
S05].
.It.meet
s
.the.requ
irements
.of.simpl
e
.non-
real-time
.appl
ications,
.mult
imedia
.syst
ems,
.
and.safe
ty-critical
.hard.real
-time
.syst
ems.
.TTEth
ernet
.is.full
y
.back
ward-compatible
.with.the.Ether
net
.
stan
dard
.and.comb
ines
.the.pro
perties
.of.sta
ndard
.Ethe
rnet
.and.TTP
.
An
.impo
rtant
.feat
ure
.of.TTEth
ernet
.is.that.it.enab
les
.the.inte
gration
.of.nonc
ritical
.best
-eort
.appl
i-
cations
.and.high
ly
.dema
nding
.safe
ty-critical
.cont
rol
.appl
ications
.into.a.singl
e
.netw
ork.
.Due.to. its.
back
ward
.comp
atibility
.to.the.Ether
net
.stan
dard,
.exis
ting
.Ether
net-based
.lega
cy
.appl
ications
.can.be.
inte
grated
.into.a.TTEth
ernet
.netw
ork
.with
out
.any.modi
cation.
.It.is.guar
anteed
.by.desig
n,
.that.thes
e
.
lega
cy
.appl
ications
.cann
ot
.disru
pt
.the.temp
orally
.pred
ictable
.comm
unication
.of.hard.real
-time
.appl
ica-
tions
.in.the.TTEt
hernet
.net
work.
© 2011 by Taylor and Francis Group, LLC
43-6 Industrial Communication Systems
43.5.1 Principles of Operation
In.order.to.allow.deterministic.real-time.communication.to.coexist.with.competing.senders.com-
municating
.in.a.bes
t-eort
.man
ner,
.TTE
thernet
.dis
tinguishes
.bet
ween
.two.fun
damentally
.di
erent
.
cat
egories
.of.tra
c:
.sta
ndard event-triggered
.(ET
)
.Eth
ernet trac
.and.tim
e-triggered
.(TT).Eth
ernet
trac.
.In.the.cas
e
.of.TTE
thernet
.tra
c,
.the.sen
ders
.are.coo
perating
.acc
ording
.to.a.con
sistent
.mes
-
sage
.sch
edule
.in. a.way. tha
t
.no. con
icts
.wil
l
.occ
ur
.bet
ween
.TTE
thernet
.mes
sages
.in. a.fau
lt-free
.
TTE
thernet
. sys
tem.
. TTE
thernet
. tra
c
. pro
vides
. dep
endable
. har
d
. rea
l-time
. com
munication
. tra
f-
c
.whi
ch
.coe
xists
.wit
h
.sta
ndard
.Eth
ernet
.tra
c
.but.is.gua
ranteed
.not.to.be.dis
rupted
.by.sta
ndard
.
Eth
ernet
.mes
sages.
Since
.sta
ndard
.Ethe
rnet
.tra
c
.typ
ically
.ori
ginates
.in.an.unc
ontrollable
.ope
n
.wor
ld,
.no.tem
poral
.
gua
rantees
. for. the. sta
ndard
. Ethe
rnet
. tra
c
. can. be. giv
en.
. Whe
never
. a. sta
ndard
. Ethe
rnet
. mes
sage
.
(wh
ich
.is.typ
ically
.unc
oordinated)
.con
icts
.wit
h
.a.TTEt
hernet
.mes
sage,
.the.tra
nsmission
.of.the.sta
n-
dard
.Ethe
rnet
.mes
sage
.wil
l
.be.pre
empted
.in.ord
er
.to.be.abl
e
.to.tra
nsmit
.the.TTEt
hernet
.mes
sage
.wit
h
.
an.a.pri
ori
.est
ablished
.con
stant
.del
ay
.(i.
e.,
.thi
s
.del
ay
.is.the.sam
e
.in.the.cas
e
.whe
re
.a.sta
ndard
.Ethe
rnet
.
mes
sage
.has.to.be.pre
empted
.in.ord
er
.to.res
olve
.a.con
ict
.as.it.is.in.the.cas
e
.whe
re
.no.con
ict
.has.
occ
urred).
.Whe
n
.the.tra
nsmission
.of.the.TTEt
hernet
.mes
sage
.has.bee
n
.com
pleted,
.the.pre
empted
.sta
n-
dard
.Eth
ernet
.me
ssage
.wi
ll
.be.au
tomatically
.re
transmitted.
e
. pre
emption
. of. sta
ndard
. Eth
ernet
. mes
sages
. is. per
formed
. by. a. ded
icated
. TTE
thernet switch
.
[SG
AK06].
.e.swi
tch
.han
dles
.the.sta
ndard
.Eth
ernet
.tra
c
.acc
ording
.to.the.sto
re-and-forward
.par
-
adigm
.and.a.bes
t-eort
.del
ay
.acc
ording
.to.the.sta
ndard
.Eth
ernet
.spe
cication.
.e.tim
e-triggered
.
trac.is.handled.according.to.the.cut-through.paradigm.with.an.a.priori.known.constant.delay.and.
min
imal
.jit
ter.
43.5.2 time Format
A.digital.time.format.can.be.characterized.by.three.parameters:.the.granularity,.the.horizon,.and.
the.epo
ch.
.e.gra
nularity
.det
ermines
.the.min
imum
.int
erval
.bet
ween
.two.adj
acent
.tic
ks
.of.a.clo
ck,
.
tha
t
.is,.the.sma
llest
.int
erval
.tha
t
.can.be.mea
sured
.wit
h
.thi
s
.tim
e
.for
mat.
.e.rea
sonable
.gra
nular-
ity
.can.be.der
ived
.fro
m
.the.ach
ieved
.pre
cision
.of.the.clo
ck
.syn
chronization
.[KO
87].
.e.hor
izon
.
det
ermines
.the.ins
tant
.whe
n
.the.tim
e
.wil
l
.wra
p
.aro
und.
.e.epo
ch
.det
ermines
.the.ins
tant
.whe
n
.the.
mea
suring
.of.tim
e
.sta
rts.
e
.tim
e
.for
mat
.of.TTEt
hernet
.is.a.bin
ary
.tim
e
.for
mat,
.whi
ch
.is.bas
ed
.on.the.phy
sical
.sec
ond
.rep
-
resented
.by.64.bit
s.
.e.fra
ctions
.of.a.sec
ond
.are.rep
resented
.as.24.neg
ative
.pow
ers
.of.2,.whi
ch
.res
ults
.
in.a.gra
nularity
.of.abo
ut
.60.ns,.and.the.ful
l
.sec
onds
.are.rep
resented
.as.40.posi
tive
.pow
ers
.of.2.whi
ch
.
res
ults
.in.a.hor
izon
.abo
ut
.30,
000
.yea
rs.
.e.tim
e
.for
mat
.has.bee
n
.sta
ndardized
.by.the.OMG.in.the.sma
ll
.
tra
nsducer
.int
erface
.sta
ndard
.[OM
G02].
.e.rep
resentation
.of.the.bin
ary
.tim
e
.for
mat
.can.be.tra
nslated
.
to.th
e
.wa
ll
.cl
ock
.ti
me
.by.a.st
andard
.Gr
egorian
.ca
lendar
.fu
nction.
43.5.3 Periods
In.TTEthernet,.the.period.durations.of.time-triggered.messages.are.restricted.to.the.positive.and.nega-
tive
.pow
ers
.of.2.of.the.sec
ond
.(1.s,.2.s,.4.s.….or.1/2.s,.1/4.s,.1/8.s.…)..Due.to.thi
s
.res
triction,
.eac
h
.per
iod
.
dur
ation
.can.be.rep
resented
.by.one.of.the.64.bit
s
.of.the.bin
ary
.tim
e
.for
mat.
.e.bit.rep
resenting
.the.
per
iod
.dur
ation
.of.a.tim
e-triggered
.mes
sage
.is.cal
led
.the.per
iod bit.
.e.TTEt
hernet
.imp
lementation
.
(ve
rsion
.1.9
)
.sup
ports
.16.di
erent
.dur
ations
.and.thu
s
.req
uires
.4.bit
s
.to.enc
ode
.the.per
iod
.bit.(se
e
.Fig
ure
.
43.
6).
.e.os
et
.of.the.sen
d
.ins
tant
.of.a.mes
sage
.to.the.sta
rt
.of.the.per
iod
.is.cal
led
.the.pha
se
.of.the.mes
-
sage.
.e.pha
se
.is.rep
resented
.by.a.pat
tern
.of.12.bit
s
.rig
ht
.to.the.per
iod
.bit
.
.us
,
.in.TTEt
hernet
.2.byt
es
.
are.req
uired
.to.stor
e
.the.per
iod
.dur
ation
.and.the.pha
se
.of.a.mes
sage.
.es
e
.2.byt
es
.are.cal
led
.the.per
iod
identier.
© 2011 by Taylor and Francis Group, LLC