Wilamowski B.M., Irwin J.D. The Industrial Electronics Handbook. Second Edition: Industrial Communication Systems
Подождите немного. Документ загружается.

26-14 Industrial Communication Systems
references
. 1.. ANSI/EIA/CEA-709.1-A,. Control. network. protocol. specification,. ANSI,. Washington. DC,.
199
9.
. 2.. ANSI/EIA/CEA.852,.Tunne
lling
.comp
onent
.netw
ork
.pro
tocols
.over.Int
ernet
.pro
tocol
.cha
nnels,
.
ANSI,.Wa
shington
.DC,.2002.
. 3.. EN.133
21-2,
.Ope
n
.dat
a
.com
munication
.in.bui
lding
.aut
omation,
.con
trols
.and.bui
lding
.man
agement-
.
Hom
e
.and.bui
lding
.ele
ctronic
.sys
tems—Part
.2:.KNX
net/IP
.com
munication,
.CEN
,
.Bru
ssels,
.
Belg
ium,
.20
06.
. 4.. EN.1434-3,.He
at
.met
ers—Data
.exc
hange
.an
d
.int
erfaces,
.CEN,.Br
ussels,
.Be
lgium,
.1997.
. 5.. EN.14908,.Open.dat
a
.communic
ation
.in.buildin
g
.aut
omation,
.cont
rols
.and.buildin
g
.man
agement.
.
Con
trol
.net
work
.pr
otocol,
.CEN,.Br
ussels,
.Be
lgium,
.2005.
. 6.. EN. 500
90,
. Hom
e
. and. bui
lding
. ele
ctronic
. sys
tems
. (HB
ES),
. CEN
ELEC,
. Bru
ssels,
. Bel
gium,
.
199
4–2009.
. 7.. IEC. 609
29,
. AC-
supplied
. ele
ctronic
. bal
lasts
. for. tubu
lar
. uo
rescent
. lam
ps,
. IEC
,
. Gen
eva,
.
Swi
tzerland.
. 8.. ISO. 16484-2,. Buildin
g
. aut
omation
. and. cont
rol
. system
s
. (BACS)—
Part
. 2:. Har
dware,
. Gene
va,
.
Swi
tzerland,
.2004.
. 9.. ISO.16484-5,.Buildin
g
.aut
omation
.and.cont
rol
.system
s—Part
.5:.Dat
a
.communic
ation
.pro
tocol,
.
ISO,.Gen
eva,
.Sw
itzerland,
.2007.
. 10.. ISO/IEC. 14543,. Info
rmation
. tec
hnology—Home
. elec
tronic
. system. (HES). arc
hitecture,
. ISO,.
Geneva,.Switzerland,.2006-2010.
. 11.. ASHR
AE
.St
anding
.St
andard
.Pr
oject
.Co
mmittee
.135,.ww
w.bacnet.org
. 12.. Pro
le
.fo
r
.We
b
.Ser
vices,
.sc
hemas.xmlsoap.org/ws/2006/02/devprof
. 13.. Digit
alstrom.org,
.ww
w.digitalstrom.org
. 14.. Digit
al
.Li
ving
.Net
work
.Al
liance,
.ww
w.dlna.org/home
. 15.. Ech
onet
.Co
nsortium,
.ww
w.echonet.gr.jp
. 16.. EnOcea
n
.Gm
bH,
.ww
w.enocean.com
. 17.. Hom
ePlug
.Al
liance,
.ww
w.homeplug.org
. 18.. IGRS,.ww
w.igrs.org
. 19.. OPC.Fo
undation,
.ww
w.opcfoundation.org
. 20.. Konn
ex
.As
sociation,
.ww
w.knx.org
. 21.. LonM
ark
.In
ternational,
.ww
w.lonmark.org
. 22.. OSGi.Al
liance,
.ww
w.osgi.org
. 23.. e.SMI.Gr
oup,
.ww
w.smi-group.com
. 24.. UPnP.Fo
rum,
.ww
w.upnp.org
. 25.. ZigBe
e
.Al
liance,
.ww
w.zigbee.org
. 26.. Z-Wave.Alliance,.www.z-wavealliance.org
. 27.. W..Gr
anzer,
.W..Ka
stner,
.G..Ne
ugschwandtner,
.an
d
.F..Pr
aus,
.Se
curity
.in.ne
tworked
.bu
ilding
.au
tomation
.
system
s,
.Pro
ceedings of the Sixth IEEE International Workshop on Factory Communication Systems,
.
pp..28
3–292,
.Tor
ino,
.Ita
ly,
.Jun
e,
.200
6.
. 28.. W..Kas
tner,
.G..Neugsc
hwandtner,
.S..Souce
k,
.and.H.. M.. New
man,
.Comm
unication
.system
s
.for.
buildin
g
.au
tomation
.an
d
.con
trol,
.Pr
oceedings of the IEEE,
.93(6):.1178–1203,.2005.
. 29.. W..Kas
tner
.and.G..Neugsc
hwandtner,
.Dat
a Communication for Distributed Building Automation,
.
CRC.Pr
ess,
.Bo
ca
.Ra
ton,
.FL,.2009.
. 30.. H..M..New
man,
.Dir
ect Digital Control of Building Systems: eory and Practice,
.John.Wile
y
.&.Son
s,
.
New.Yo
rk,
.1994.
© 2011 by Taylor and Francis Group, LLC
Building and Home Automation 26-15
. 31.. T..Novak,.A..Treytl,.and.P..Palensky,.Common.approach.to.functional.safety.and.system.security.
in.buildin
g
.aut
omation
.and.cont
rol
.system
s,
.12th IEEE
Conference on Emerging Technologies and
Factory Automation,
.pp
.
.1141–1148,.Pa
tras,
.Gr
eece,
.Sep
tember
.2007.
. 32.. C..Reinis
ch,
.W..Kas
tner,
.G..Neugsc
hwandtner,
.and.W..Granzer
,
.Wire
less
.tec
hnologies
.in.hom
e
.and.
buildin
g
.aut
omation,
.Pro
ceedings of the Fih IEEE International Conference on Industrial Informatics,
.
pp..93–98,.Pra
gue,
.Czec
h
.Rep
ublic,
.Jun
e
.23–27,.2007.
. 33.. S..Souce
k
.and.T..Saut
er,
.Qua
lity
.of.serv
ice
.concer
ns
.in.IP-ba
sed
.cont
rol
.system
s,
.IEEE Tr
ansactions
on Industrial Electronics,
.51(6):.1249–1258,.2004.
© 2011 by Taylor and Francis Group, LLC
© 2011 by Taylor and Francis Group, LLC
27-1
27.1 Introduction
It.is.commonly.accepted.that.the.multimedia.applications.that.appeared.in.the.mid-1990s.are.the.third.
gene
ration
.of.comp
uter
.appl
ications
.[P98
].
.e.rst.gene
ration
.was.char
acterized
.by.its.abil
ity
.to.man-
a
ge
.data
,
.whil
e
.the.seco
nd
.gene
ration
.was.consi
dered
.to.be.prin
cipally
.for.comm
unication.
.is.has.had.
an.inu
ence
.on.comp
uter
.inst
ruction
.set.arch
itecture
.(ISA
)
.in.curr
ent
.proc
essors
.with.the.intr
oduction
.
of.mult
imedia
.exte
nsions
.(e.g
.,
.MMX.and.SSE.in.Inte
l)
.or.in.the.deve
lopment
.and.den
ition
.of.LAN.and.
WAN.netw
orks
.that.were.able.to.prov
ide
.qual
ity
.of.serv
ice
.(QoS
)
.to.this.tra
c
.(suc
h
.as.IEEE.802.
11e).
.
e.area.of.indu
stry
.has.not.been.an.exce
ption
.to.this.phen
omenon
.and,.from.the.begi
nning,
.the.deve
l-
opment
.of.new.indu
strial
.appl
ications
.[P98
,RSB99,WIF01]
.was.pred
icted
.both.for.the.high.degr
ee
.of.
inte
raction
.betw
een
.huma
n
.and.indu
strial
.proc
ess
.that.they.allo
w
.and.for.thei
r
.part.in.the.deve
lopments
.
in.moni
toring
.and.cont
rol,
.qual
ity
.cont
rol,
.fact
ory
.auto
mation,
.and.fact
ory
.comm
unication.
.Nowa
days
.it.is.
poss
ible
.to.nd.mult
imedia
.appl
ications
.in.near
ly
.all.area
s
.of.indu
strial
.comm
unications—automation,
.
moni
toring,
.ima
ge
.pro
cessing,
.rob
otics,
.rem
ote
.con
trol,
.etc
.
ese
.appl
ications
.have.a.wide.rang
e
.of.requ
irements,
.and.ther
e
.are.nume
rous
.tech
nologies
.that.sup-
p
ort
.them
.
.Data.comp
ression
.tech
niques
.and.tech
niques
.for.tran
smission
.of.this.kind.of.info
rmation
.
are.amon
g
.the.most.impo
rtant
.of.thes
e
.tech
nologies.
.Howe
ver,
.it.is.nece
ssary
.to.rst.consi
der
.the.stru
c-
ture
.of.the.data.mana
ged
.in.this.kind.of.appl
ication.
.Imag
es
.or.imag
e
.sequ
ences
.have.a.heig
ht
.and.widt
h,
.
call
ed
.reso
lution,
.whic
h
.is.meas
ured
.in.pixe
ls.
.ese.pixe
ls
.repr
esent
.info
rmation
.for.whic
h
.a.spec
ic
.
numbe
r
.of.bits.per.pixe
l
.(bpp
)
.is.requ
ired,
.the.most.comm
on
.bein
g
.8.bits.in.gray
scale
.and.15.(5.bits.for.
each.colo
r
.plan
e),
.24,.or.32.in.colo
r.
.Reso
lution,
.toget
her
.with.the.nece
ssary
.rate.of.fram
es
.per.seco
nd
.
(fps).provides.the.bit.rate.necessary.for.the.application,.normally.measured.in.bits.per.second.(bps)..
e.most.comm
only
.used.form
at
.in.indu
strial
.and.moni
toring
.appl
ications
.is.8.bpp.in.gray
scale,
.and.
when.work
ing
.in.colo
r
.the.RGB.(red
,
.gree
n,
.blue
)
.form
at,
.using.8.bits.for.each.colo
r
.plan
e.
.is.mean
s
.
24.bpp.are.used.for.colo
r,
.as.can.be.seen.in.Figu
re
.27.1
.
.Howe
ver,
.the.use.of.the.YUV.colo
r
.form
at
.with.
subs
ampling
.is.comm
on,
.and.this.is.gene
rally
.used.in.the.comp
ression
.of.colo
r
.imag
es.
.is.form
at,
.
27
Industrial Multimedia
27.1. Introduction.....................................................................................27-1
27.2
. Mult
imedia
.Com
pression:
.A.Rev
iew............................................27-4
Image.Compressors. •. Video.Compressors. •. Quality.Evaluation
27.3. Industrial.Multimedia.Applications.............................................27-8
Monitoring.Applications. •. Computer.Vision.Applications
27.4. Image.Transmission........................................................................27-9
IEEE.1394. •. IP-Based.Networks
27.5. Conclusions.................................................................................... 27-11
Acknowledgment....................................................................................... 27-11
References................................................................................................... 27-11
Javier
Silvestre-Blanes
Universidad Politécnica
de Val
encia
Manfred Weihs
TTTech
Comp
utertechnik
AG
Víctor-M.
Sempere-Payá
Universidad Politécnica
de Val
encia
© 2011 by Taylor and Francis Group, LLC
27-2 Industrial Communication Systems
used.in.analog.signals,.has.one.plane.used.for.luminance.(Y.or.brightness).and.the.other.two.used.by.the.
chrominance.component.(U.and.V,.the.information.on.color)..It.is.known.that.the.human.vision.system.
(HVS).is.more.sensitive.to.the.quality.of.the.Y.plane.than.the.U.and.V.planes,.so.subsampling.is.applied.
to.reduce.the.amount.of.information.in.analog.signals.and.can.be.seen.as.a.rst.stage.of.compression.
e
.resolution.and.the.fps.rate.are.established.by.the.type.of.application..Once.established,.these.fac-
tors
.inuence.the.requirements.of.the.image’s.characteristics,.the.spatial.relationship.of.the.equipment.
participating.in.the.application,.and.the.implications.for.the.temporal.requirements.that.must.be.
satised..Although.there.is.a.wide.range.of.multimedia.applications.being.used.in.factory.automa-
tion,
.such.as.virtual.manufacturing.[WIF01].or.online.interactive.training,.we.consider.[SS07].process.
monitoring.and.control.through.image.processing.to.be.the.most.relevant..In.the.case.of.monitoring.
processes,.where.an.application’s.temporal.requirements.are.not.critical,.the.sensor.and.the.visualiza-
tion
.node.can.be.in.the.same.machine,.in.the.same.plant,.or.in.any.part.of.the.world..In.the.case.of.auto-
mated
.control,.where.applications.do.have.critical.temporal.requirements,.sensor.and.processing.node.
are.normally.in.the.same.machine.(personal.area.network,.distances.of.a.few.meters),.but.other.solutions.
are.possible.as.well..Reductions.in.costs.and.the.increases.in.processing.capacity.are.giving.rise.to.a.new.
generation.of.intelligent.cameras,.where.capture.and.image.processing.are.integrated.in.the.same.device.
(distances.in.centimeters)..On.the.other.hand,.this.area.is.beginning.to.see.the.inuence.of.the.expand-
ing
.use.of.Ethernet.to.areas.outside.the.oce,.and.this.is.leading.to.the.use.of.IP.technology.in.image.
transmission.over.distances.of.hundreds.meters.normally,.but.also.over.greater.distances,.when.there.
are.less.strict.temporal.requirements.
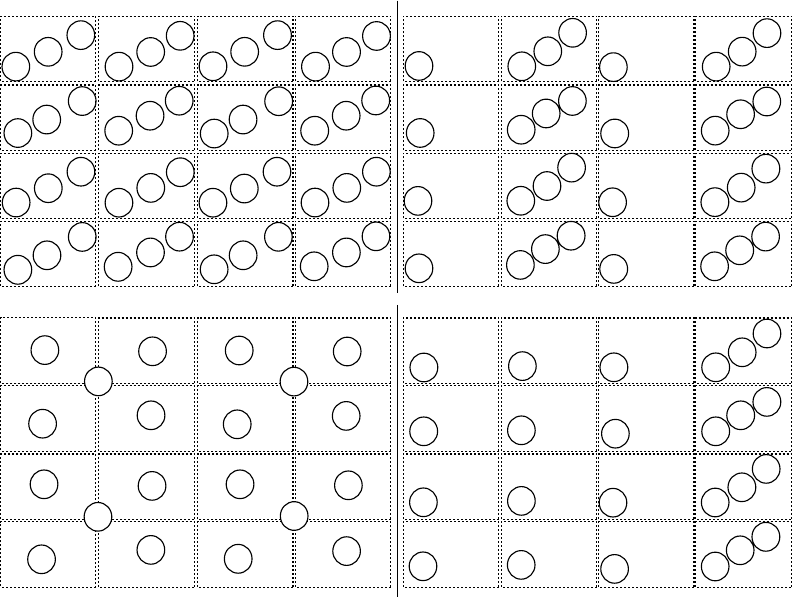
In
.Figure.27.2,.the.use.of.different.types.of.communication.networks.used.in.multimedia.appli-
cations
.depending.on.communication.distances.between.sensor.and.processing.node.can.be.seen.
.
R
RGB 4:2:2
4:2:0 4:1:1
pixel (0,0) pixel (1,0) pixel (2,0) pixel (3,0) pixel (0,0) pixel (1,0) pixel (2,0) pixel (3,0)
pixel (0,1) pixel (1,1) pixel (2,1) pixel (3,1) pixel (0,1)
pixel (1,1)
pixel (2,1) pixel (3,1)
pixel (0,2) pixel (1,2) pixel (2,2) pixel (3,3) pixel (0,2) pixel (1,2) pixel (2,2) pixel (3,3)
pixel (0,3)
pixel (1,3)
pixel (2,3)
pixel (3,3)
pixel (0,3)
pixel (1,3)
pixel (2,3)
pixel (3,3)
pixel (0,0) pixel (1,0) pixel (2,0) pixel (3,0) pixel (0,0) pixel (1,0) pixel (2,0) pixel (3,0)
pixel (0,1)
pixel (1,1)
pixel (2,2)
pixel (3,1)
pixel (0,1) pixel (1,1) pixel (2,1)
pixel (3,1)
pixel (0,2) pixel (1,2) pixel (2,1) pixel (3,3) pixel (0,2) pixel (1,2) pixel (2,2) pixel (3,3)
pixel (0,3)
pixel (1,3)
pixel (2,3)
pixel (3,3)
pixel (0,3) pixel (1,3) pixel (2,3)
pixel (3,3)
R
G
G
B
B
R
R
R
R
G
G
G
G
B
B B
B
R
R
R
R
R
R
R
R
B
B B
Y
Y
Y
Y
Y
Y
Y
YY
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
U
U
U
V
V
Y
Y
Y
U
U
U
V
V
V
V
Y
Y
U
U
V
V
Y
U
V
Y
Y
Y
U
U
U
V
V
V
Y
Y
Y
B
B
B
G
G
G
G
G
G
R
B
G
R
B
G
G
G
B
B
UV
UV
UV
UV
FIGURE 27.1 Multimedia.information.
© 2011 by Taylor and Francis Group, LLC
Industrial Multimedia 27-3
These.networks.have.transmission.capacities.ranging.from.kbps.to.Gbps..Image.resolutions.can.
also.be.wide.ranging,.as.can.be.seen.in.Table.27.1,.where.some.of.the.currently.existing.resolutions.
are.enumerated.and.where.the.bandwidth.necessary.for.raw.transmission.with.a.rate.of.30.images/s,.
expressed.in.megabit.per.second.(Mbps),.is.shown.
In
.monitoring.applications,.there.is.more.freedom.to.choose.resolutions.and.capture.rates,.but.with.
some.restrictions..For.example,.in.a.security.application.in.which.the.movement.of.people.is.being.
monitored,.the.capture.speed.must.ensure.that.someone’s.passing.is.captured.in.at.least.one.image..
Further,.the.resolution.used.will.determine.if.their.face.can.be.identied.or.not..In.control.applications.
there.is.less.freedom,.and.these.parameters.are.strictly.dened.by.the.application.requirements..If.the.
objects.being.monitored.move.at.a.speed.of.600.objects/min,.at.least.10.images/s.must.be.captured..If.
the.objects.have.a.dimension.of.500.×.500.mm.and.4.pixels/mm.are.needed.to.guarantee.the.target.of.
TABLE 27.1 Image.Resolutions.in.Multimedia.Applications
Name Resolution Mbps Name Resolution Mbps
SQCIF 128
.×.96 8.84 QCIF 176.×.144 18.2
CIF 352
.×.288 72.9 4CIF 704.×.576 291.9
QQVGA 160
.×.120 13.8 QVGA 320.×.240 55.2
VGA 640
.×.480 221.1 SVGA 800.×.600 345.6
XGA 1024
.×.768 556.2 UXGA 1600.×.1200 1,382.4
QXGA 2048
.×.1536 2264.9 SXGA 1280.×.1024 943.7
QSXGA 2560
.×.2048 2831.1 HSXGA 5120.×.4096 15,099.5
WVGA 852
.×.480 294.4 WXGA 1366.×.768 755.34
WSXGA 1600
.×.1024 1179.6 WUXGA 1920.×.1200 1,658.8
WOXGA 2560
.×.1600 2949.1 WQSXGA 3200.×.2048 4,718.6
WQUXGA 3840
.×.2400 6635.5 WHSXGA 6400.×.4096 18,874.36
WHUXGA 7680
.×.4800 26542.0 HD480 852.×.480 294.4
HD720 1280
.×.720 663.5 HD1080 1920.×.1080 1,492.9
Multimedia
source
Multimedia
processing node
PAN
....................
RDSI
ADSL
SDSL
WiMAX
MAN/WAN
LAN
Ethernet
Fast-Ethernet
WiFi
WiMAX
Analog:
RS-4xx
Digital
USB
Firewire
Cameralink
Bluetooth
FIGURE 27.2 Multimedia.communications.in.industrial.environment.
© 2011 by Taylor and Francis Group, LLC
27-4 Industrial Communication Systems
the.image.processing.application,.then.2000.×.2000.pixels.will.be.necessary,.captured.by.a.sensor.with.
a.sucient.resolution..is.means.that.a.transmission.capacity.of.at.least.approximately.960.Mbps.is.
required..In.the.case.of.industrial.applications.where.3D.information.is.needed,.this.value.has.to.be.mul-
tiplied
.by.the.number.of.cameras.needed..Due.to.these.high.data.rates,.it.is.sometimes.necessary.to.use.
image.compression/decompression,.although.these.operations.can.introduce.latency.into.the.process.
Depending
.on.the.eectiveness.of.the.compression.and.also.the.limits.imposed.by.the.type.of.applica-
tion,
.this.process.will.produce.a.compression.ratio,.normally.expressed.in.X:1,.being.X.the.number.of.bytes.
that.can.be.represented.using.only.1.byte,.or.in.bpp,.thus.expressing.the.reduction.as.well..For.example,.an.
image.of.800.×.600.pixels.with.24.bpp.requires.11,520,000.bits,.which.is.1.44.Mbyte..If.we.compress.using.
a.5:1.ratio,.there.will.be.2,304,000.bits,.giving.an.equivalent.compression.ratio.of.4.8.bpp.
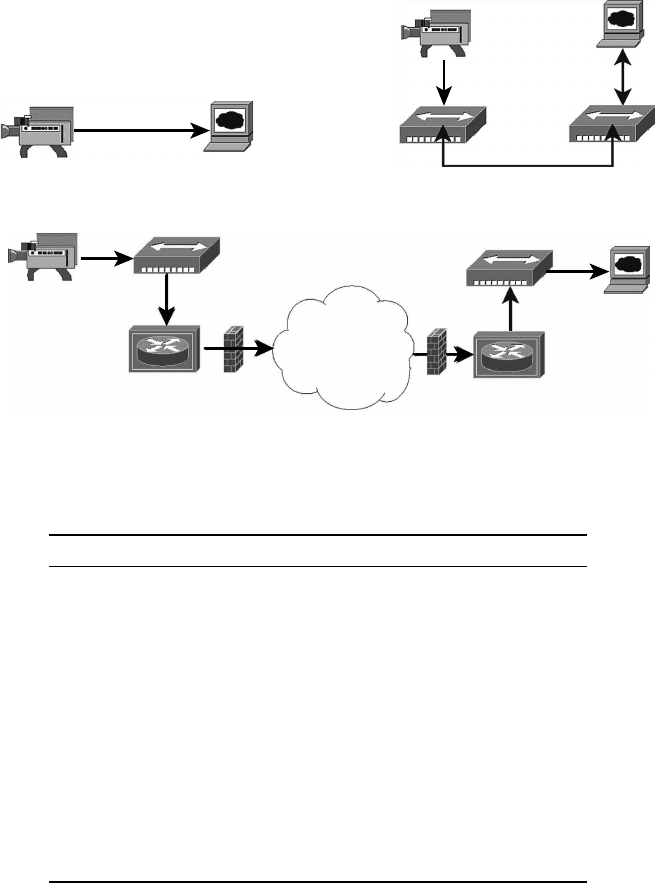
27.2 Multimedia Compression: a review
e.aim.of.image.compression.is.to.reduce.the.application’s.bandwidth.requirements.(or.storage.in.other.
application.types).without.distorting.signicantly.the.original.information,.although.this.causes.laten-
cies,
.as.it.can.be.seen.in.Figure.27.3..Distortion.or.errors.generated.by.the.compression.and.decompres-
sion
.process.of.the.image.must.be.limited.and.have.to.be.measured:
.
e x y f x y g x y
( , ) ( , ) ( , )
= −
.
(27.1)
In
.Figure.27.3,.we.can.see.how.the.original.image.must.go.through.a.series.of.steps.to.achieve.a.reduction.
of.the.information.to.be.transmitted..is.will.cause.a.latency.T
c
.(compression.time).that.will.depend.on.
the.complexity.of.the.algorithm.used..e.compressed.information.must.then.be.transmitted.through.
the.network,.which.means.it.is.necessary.to.packetize.the.information.and.wait.a.period.of.time.that.
will.depend.on.the.scheduling.policy.of.the.source.and.the.priority.of.the.multimedia.information.with.
regard.to.other.information.that.is.using.the.same.medium.(e.g.,.an.alarm.could.have.more.priority)..
Finally,.we.have.to.access.the.medium.and.carry.out.the.transmission.of.the.information..is.process.
will.introduce.a.latency.T
t
.(transmission.time).that.will.be.smaller.the.more.ecient.the.compression.
process.has.been..ere.is.also.an.unpack/reception.time,.but.this.is.almost.insignicant,.and.above.all,.
a.decompression.time.(T
u
).depending.on.the.chosen.compressor.
ere
.are.several.classications.of.compressors,.depending.on.the.distortion.that.they.introduce.in.
the.source,.the.complexity.of.the.transmitter.and.receiver,.and.the.type.of.redundancy.employed..In.
the.rst.place,.there.are.compressors.with.or.without.losses..Lossless.compressors.do.not.distort.the.
image,.that.is,.f(x,.y).=.g(x,.y)..ese.compressors.are.not.used.in.excess.because.the.rate.of.compression.
they.can.achieve.is.approximately.2:1,.which.restricts.their.use.in.the.industrial.area..However,.they.are.
used.in.other.types.of.applications,.such.as.medical.applications,.where.degradation.that.can.distort.the.
medical.diagnosis.is.not.tolerated.and.where.transmission.latencies.are.not.critical..In.other.types.of.
Image
preparation
Access
medium
Packetization
Transmission
Scheduling
Reverse
process
f (x, y)
Quantization
Encoding
Previous
image
Motion
analysis
Compression Transmission
Uncompression
Received image g(x, y)
Original image
T
c
T
t
T
u
Transformation
domain
FIGURE 27.3 General.multimedia.application.scheme.
© 2011 by Taylor and Francis Group, LLC
Industrial Multimedia 27-5
application.where.loss.of.information.is.tolerated,.lossy.compressors.are.used,.which.allow.a.signicant.
inc
rease
.in.the.com
pression
.rat
e.
.Con
cerning
.the.com
plexity
.of.the.pro
cess,
.thr
ough
.an.asy
mmetric
.
app
roach,
.it.is.pos
sible
.to.use.qui
te
.com
plex
.alg
orithms
.in.the.sou
rce
.to.opti
mize
.the.qua
lity
.and.bit.
rat
e
.(th
is
.can.inv
olve
.ful
l
.two.pas
ses),
.whi
le
.the.dec
ompression
.is.per
formed
.in.rea
l
.tim
e.
.How
ever,
.
thi
s
.app
roach
.can
not
.be.use
d
.in.liv
e
.rea
l-time
.app
lications,
.whi
ch
.are.the.mor
e
.com
mon,
.so.usu
ally
.
sym
metric
.app
roaches
.are.use
d,
.whi
ch
.hav
e
.a.simi
lar
.com
plexity
.in.com
pression
.and.unc
ompression.
.
Fin
ally,
.the
re
.are.com
pressors
.tha
t
.onl
y
.use.the.spa
tial
.redu
ndancy
.of.ima
ges,
.tha
t
.is,.of.the.self
-contained
.
inf
ormation
.in.an.ima
ge,
.and.com
pressors
.tha
t
.also.use.the.tem
poral
.redu
ndancy,
.tha
t
.is,.the.redu
ndancy
.
cre
ated
.by.sim
ilarities
.be
tween
.co
nsecutive
.fr
ames.
Spatial
.red
undancy
.exp
loits
.the.pro
ven
.sta
tistical
.cor
relation
.bet
ween
.the.pix
els
.of.an.ima
ge,
.so.it.
all
ows
.us.to.ext
ract
.a.pix
el’s
.val
ue
.fro
m
.the.nei
ghboring
.pix
els.
.With.thi
s
.tec
hnique,
.it.is.not.nec
essary
.
to.rep
roduce
.eac
h
.pix
el
.of.an.ima
ge
.ind
ependently.
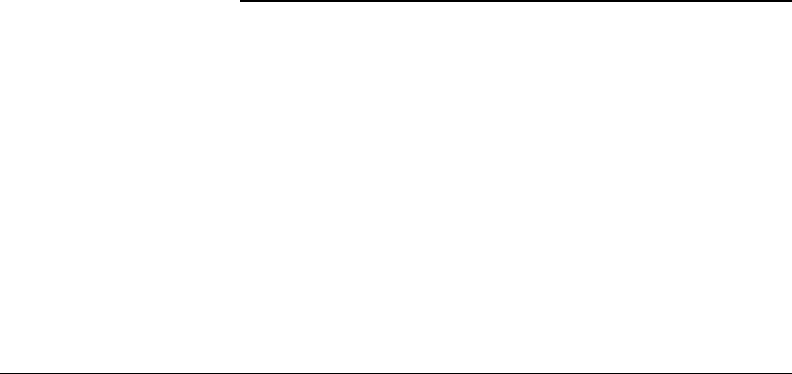
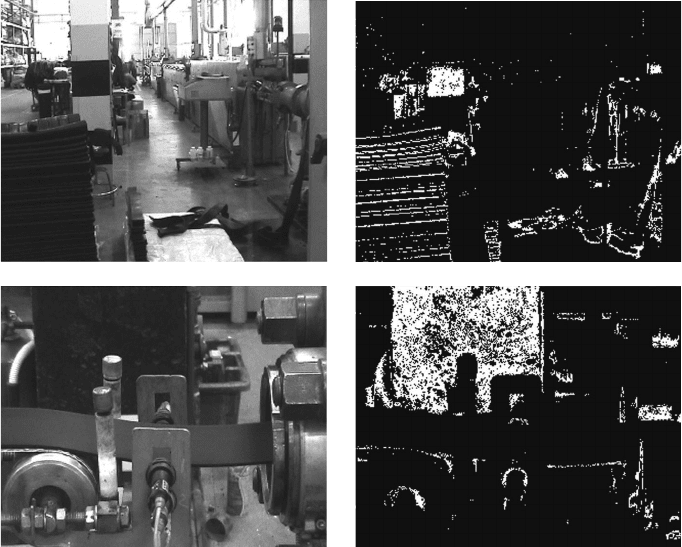
.In.Fig
ure
.27.
4,
.we.can.see.two.sce
nes
.of.ind
ustrial
.
mon
itoring
.[SS
A04].
.On.the.le
,
.the
re
.are.wid
e
.are
as
.in.the.ima
ge
.tha
t
.hav
e
.a.simi
lar
.val
ue,
.whi
ch
.is.
use
d
.by.com
pressors
.to.red
uce
.the.nec
essary
.bit
s
.to.rep
roduce
.the.inf
ormation.
.On.the.le
,
.all.pix
els
.in.
the.int
erval
.[28
–32]
.hav
e
.bee
n
.rep
resented
.in.whi
te,
.whi
ch
.giv
es
.an.ide
a
.of.the.spa
tial
.red
undancy
.and.
its.po
tential
.to.re
duce
.th
e
.nu
mber
.of.bi
ts
.to.re
present
.th
e
.mu
ltimedia
.in
formation.
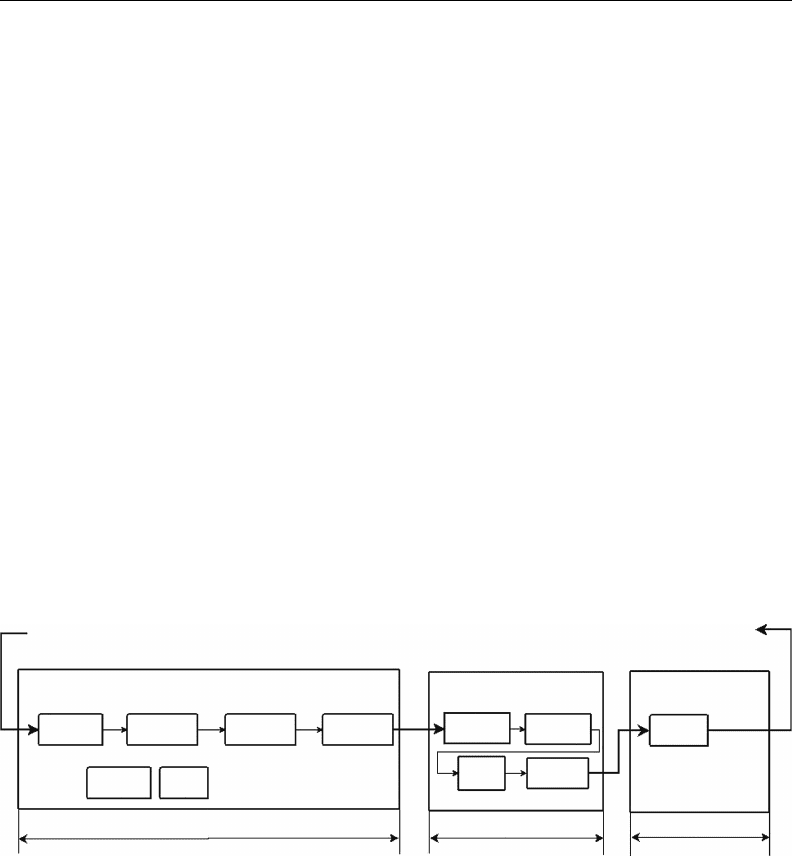
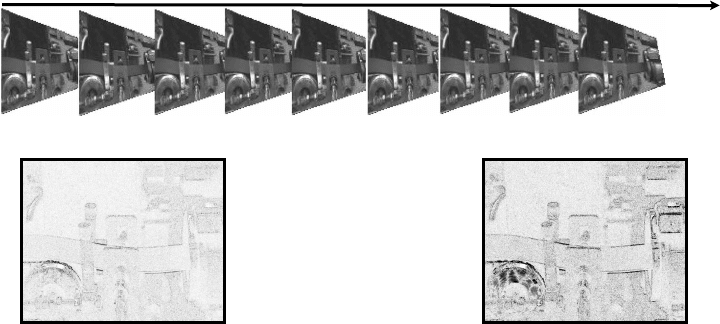
e
.tem
poral
.red
undancy
.com
es
.fro
m
.the.fac
t
.tha
t
.a.cor
relation
.bet
ween
.pix
els
.of.con
secutive
.ima
ges
.
in.a.seq
uence
.exi
sts.
.Bet
ween
.con
secutive
.fra
mes,
.les
s
.tha
n
.10%.of.pix
els
.cha
nge
.the
ir
.val
ue
.in.abo
ut
.
1%.of.the.pea
k
.sign
al.
.In.thi
s
.way
,
.ima
ges
.pix
els
.can.be.pre
dicted
.fro
m
.the.pix
els
.of.an.ima
ge
.nea
rby
.in.
the.sequence..On.the.other.hand,.the.fact.that.changes.between.consecutive.images.are.caused.by.the.
mov
ement
.of.som
e
.obje
cts
.in.the.sce
ne
.has.cau
sed
.the.dev
elopment
.of.mot
ion
.com
pensation
.cod
ing
.
tec
hniques.
.Fig
ure
.27.
5
.sho
ws
.thi
s
.in.an.ind
ustrial
.mon
itoring
.seq
uence
.capt
ured
.at.25.fra
mes/s.
.As.we.
can.see
,
.the.di
erence
.bet
ween
.con
secutive
.ima
ges
.is.ver
y
.lit
tle
.in.thi
s
.cas
e,
.and.for.thi
s
.rea
son,
.in.thi
s
.
typ
e
.of.se
quence,
.th
e
.us
e
.of.te
mporal
.re
dundancy
.al
lows
.us.to.ob
tain
.hi
gh
.ra
tes
.of.co
mpression.
FIGURE 27.4 Spatial.redundancy.examples.
© 2011 by Taylor and Francis Group, LLC
27-6 Industrial Communication Systems
Whichever.method.the.compressor.uses,.it.is.still.possible.to.make.use.of.another.redundancy.of.the.data.
extracted—the.code.redundancy..is.is.related.to.the.reproduction.of.information.with.the.same.coding.
and.for.which.there.are.techniques.that.allow.us.to.reduce.the.number.of.bits.per.symbol,.based.on.tech-
niques
.that.allow.the.use.of.very.few.bits.to.reproduce.the.most.common.symbols,.and.more.bits.for.those.
symbols.that.appear.less.frequently,.such.as.Human.coding,.arithmetic.code,.and.variable-length.coding.
27.2.1 Image Compressors
Still.image.compressors.were.developed.in.mid-1980s,.with.International.Telecommunication.Union.(ITU).
and.International.Organization.for.Standardization.(ISO),.followed.by.ISO/IEC.international.standard.
JPEG.(Joint.Photographic.Experts.Group).in.1992.[ISO94]..is.standard.takes.in.four.compression.modes,.
although.not.all.of.them.are.always.supported..ese.modes.are.sequential.discrete.cosine.transformation.
(DCT)-based.mode,.progressive.DCT-based.mode,.hierarchical.mode,.and.lossless.mode..e.rst.is.the.
baseline.of.JPEG.and.the.most.common.one..Progressive.and.hierarchical.modes.enable.a.progressive.pre-
sentation
.of.the.image,.and.the.latter.is.also.useful.in.applications.with.multiresolution.requirements..e.
standard.JPEG.prepares.the.image.by.carrying.out.a.color.space.transformation.from.RGB.to.YUV.4:2:2.or.
4:1:1,.and.the.data.unit.is.a.block.of.8.×.8.pixels..ese.units.are.transformed.through.a.DCT.obtaining.64.
DCT.coecients..ese.coecients.are.mapped.to.integer.numbers.and,.depending.on.the.quality.speci-
ed,
.the.coecients.lower.than.a.given.value.are.set.to.0..ese.coecients.are.ordered.in.a.“zig-zag”.form.
and.coded.using.Human.followed.by.a.runlength.coding..e.standard.JPEG2000.[CSE00].tries.to.solve.
most.of.JPEG’s.limitations.while.at.the.same.time.providing.a.signicant.quality.improvement.for.the.same.
compression.rates..To.achieve.this.objective,.it.uses.more.advanced.techniques.in.each.stage.of.the.compres-
sion.
.In.this.way,.instead.of.using.the.DCT.transform,.it.uses.wavelet.transformation.on.the.tile.compo-
nents,
.which.gives.dierent.decomposition.levels,.each.of.them.containing.a.number.of.subbands.with.the.
transformation.coecients..e.transformed.coecients.of.each.subband.are.arranged.in.code.blocks.and.
the.symbols.produced.by.a.bit-plane.coding.technique.are.coded.through.an.adaptative.binary.arithmetic.
code..Today,.it.is.generally.accepted.that.this.standard.only.outperforms.JPG.signicantly.when.very.high.
compression.rates.have.to.be.used,.since.the.computation.complexity.is.quite.high.compared.to.JPEG.
27.2.2 Video Compressors
ere.are.two.main.families.of.video.compressors,.the.ITU.standards,.denominated.H.26x,.and.the.
ISO.Motion.Picture.Expert.Group.standards,.denominated.MPEGx..e.rst.ITU.standard.was.H.261,.
i5
i2-i1 i9-i1
i6 i7 i8 i9
Time
t = 320t = 280t = 240t = 200t = 160t = 120t = 80t = 40t = 0 ms . . . . . . . .
i4i3i2i1
FIGURE 27.5 Temporal.redundancy.example.
© 2011 by Taylor and Francis Group, LLC

Industrial Multimedia 27-7
which.works.only.with.QCIF.and.CIF.resolutions.(see.Table.27.1)..It.works.with.blocks.of.8.×.8.pixels.
and.in.the.colo
r
.spac
e
.YUV.with.subs
ampling
.4:1:
1.
.e.intr
aframe
.codi
ng
.(den
ominated
.I.fram
es
.
using.MPEG.nome
nclature)
.is.base
d
.on.JPEG.tech
nology,
.and.the.inte
rframe
.codi
ng
.(den
ominated
.
P,.from.predi
ctive)
.is.based.on.moti
on
.esti
mation
.with.resp
ect
.to.prev
ious
.fram
es,
.with.a.searc
h
.rang
e
.
of±
15
.pixe
ls,
.and.codi
ng
.the.die
rences
.betw
een
.macr
oblocks
.when.these.are.high
er
.than.a.thre
shold
.
with.DCT..e.stan
dard
.H.26
3
.is.an.exte
nsion
.of.H.26
1
.reac
hing
.high
er
.bit.rate
s
.for.the.same.qual
ity.
.
e.mor
e
.rel
evant
.die
rences
.are.that.the.moti
on
.vecto
r
.may.be.based.also.on.futu
re
.fram
es
.(if.the.fram
e
.
is.coded.usin
g
.past.and.futu
re
.fram
es,
.it.is.deno
minated
.B,.from.bidi
rectional),
.an.unli
mited
.searc
h
.spac
e
.
for.moti
on
.vecto
r,
.and.the.poss
ibility
.of.work.with.more.resol
utions
.such.as.4CIF.and.16CI
F.
e
.othe
r
.most.impo
rtant
.fami
ly
.of.comp
ressors
.are.thos
e
.gene
rated
.by.MPEG.(Mot
ion
.Pict
ure
.
Expe
rt
.Grou
p),
.from.ISO/
IEC.
.e.rst.of.thes
e,
.MPEG
-1
.(ISO.1117
2,
.1991
)
.is.very.simil
ar
.to.H.26
1
.and.
was.deve
loped
.to.send.audi
o/video
.at.abou
t
.1.5.Mbps
,
.using.a.subs
ampled
.4:2:
0
.and.the.high
er
.reso
lu-
tion
.of.786.×.576.pixe
ls.
.Anot
her
.die
rence
.is.that.it.supp
orts
.VCR-
like
.oper
ations
.(fas
t
.forw
ard,
.rewi
nd,
.
dire
ct
.rand
om
.acce
ss,
.etc.
).
.MPEG
-2
.(ISO.1381
8,
.1993
)
.was.a.stan
dard
.deve
loped
.for.the.broa
dcasting
.
indu
stry,
.with.a.bit.rate.betw
een
.4.and.6.Mbps
.
.MPEG
-4
.(ISO.1449
6,
.1999
)
.was.deve
loped
.orig
inally
.
for.tele
conferencing
.appl
ications
.but.soon.it.show
ed
.adeq
uate
.prop
erties
.to.be.used.in.dist
ributed
.mul-
t
imedia
.appl
ications.
.Virt
ual
.scen
arios
.can.be.comp
osed
.of.die
rent
.objec
ts,
.whic
h
.can.be.mana
ged
.
by.the.user.inde
pendently
.of.othe
rs.
.ITU.intr
oduced
.some.inte
resting
.impr
ovements
.in.the.stan
dards
.
that.foll
owed
.H.26
3.
.H.26
3+
.pres
ented
.SNR.scal
ability
.(spa
tial
.and.temp
oral)
.and.H.26
L
.pres
ents
.some.
improvements.in.information.coding..is.work.coincided.with.the.developments.made.by.MPEG,.
deve
lopments
.carr
ied
.out.in.unis
on
.with.deve
lopments
.on.the.stan
dard
.H.26
4
.(JVT
,
.Join
t
.Vide
o
.Team
),
.
bett
er
.know
n
.as.MPEG
-4
.AVC.(adv
anced
.vide
o
.codi
ng)
.(MPE
G4
.part.10)..e.targ
et
.of.new.comp
res-
sors
.was.to.get.a.bit.rate.redu
ction
.of.50%.with.resp
ect
.to.prev
ious
.stan
dards
.and.achi
eve
.a.more.reli
able
.
code
c
.in.the.pre
sence
.of.err
ors.
27.2.3 Quality Evaluation
e.measurement.of.distortion.produced.by.the.compression/decompression.process.is.still.open.to.
deba
te,
.and.has.been.appr
oached
.from.vari
ous
.angl
es.
.Firs
t,
.the.dest
ination
.of.the.info
rmation
.is.usu-
a
lly
.the.huma
n
.eye,.so.the.degr
adation
.meas
urement
.must.take.this.into.acco
unt.
.is.has.prod
uce
.
mech
anisms
.to.get.subje
ctive
.meas
urement,
.bein
g
.the.mean.opin
ion
.scor
e
.(MOS
)
.from.expe
riments
.
with.huma
n
.subje
cts
.the.most.comm
on.
.Howe
ver,
.this.eval
uation
.is.time
-consuming
.and.expe
nsive,
.so.
die
rent
.objec
tive
.meth
odologies
.desig
ned
.to.get.quan
titative
.meas
urement
.has.been.deve
loped.
.ese.
can.be.clas
sied
.as.full
-reference
.and.no-r
eference,
.depe
nding
.on.the.avai
lability
.of.an.orig
inal
.imag
e,
.
alth
ough
.her
e
.we.are.goi
ng
.to.tal
k
.abo
ut
.ful
l-reference
.met
hods,
.as.it.is.the.mos
t
.com
mon
.app
roach.
To
.meas
ure
.the.erro
r
.betw
een
.two.signa
ls,
.the.simpl
est
.metr
ic
.is.the.mean.squa
re
.erro
r
.(MSE
)
.whic
h
.
in.mult
imedia
.is.calc
ulated
.by.aver
aging
.the.squa
red
.inte
nsity
.die
rences
.of.disto
rted
.and.refe
rence
.
imag
e
.pixe
ls,
.and.the.most.used.is.the.peak.signa
l-to-noise
.rati
o
.(PSN
R),
.meas
ured
.in.deci
bels.
.Bein
g
.
MAX.the.max
imum
.pos
sible
.pix
el
.val
ue
.of.the.ima
ge,
.it.can.be.cal
culated
.as
.
PSNR
MAX
MSE
=
20
10
2
log
.
(27.
2)
ese
.metr
ics
.are.quit
e
.comm
on
.beca
use
.they.are.simpl
e
.to.calc
ulate
.and.have.clea
r
.physi
cal
.mean
ings,
.
but.they.are.not.well
-matched
.to.the.perc
eived
.visu
al
.qual
ity.
.is.fact.has.prom
oted
.the.deve
lopment
.
of.new.metr
ics,
.such.as.the.stru
ctural-similarity
.(SSI
M)
.base
d
.[WBS
S04]
.for.a.deep
er
.expl
anation
.on.
the.form
ulas
.that.enab
le
.thei
r
.calc
ulation,
.whic
h
.is.not.base
d
.on.a.meas
urement
.of.the.erro
r
.since.it.is.
base
d
.on.imag
e
.form
ation
.prop
erties:
.lumi
nance,
.cont
rast,
.and.stru
ctural
.info
rmation.
.Othe
r
.exam
ples
.
of.new.metr
ics
.are.UQI,.VQM,.PEVQ
,
.and.CZD,.anal
yzed
.by.the.Vide
o
.Qual
ity
.Expe
rt
.Grou
p
.(VQE
G),
.
some.of.whi
ch
.wer
e
.sta
ndardized
.as.ITU
-T
.Rec
.
.J..24.g.and.J..247.in.200
8
.[VR
Z07].
© 2011 by Taylor and Francis Group, LLC