Weinan E. Principles of Multiscale Modeling
Подождите немного. Документ загружается.

9.1. ODES WITH DISPARATE TIME SCALES 397
This is the complement of the unit disk centered at z = 1.
Note that the stability region for the backward Euler method contains the negative
real axis. This is an important feature since the fast component of the dynamics in (9.1.9)
is of the form of (9.1.22) with λ = −1/ε. This is not just a feature of the simple model
problem such as (9.1.9), it is rather common for ODE systems that arise from chemical
kinetic models, discretization of dissipative PDEs, etc.
So far we have only discussed the simplest implicit scheme, the backward Euler
method. There are other implicit methods such as the Adams-Moulton methods and
the bacward differentiation formula. We refer to st andard ODE textbooks such as [21]
for details.
From a practical viewpoint, one disadvantage of the implicit schemes is that they are
implicit: At every time step, one has to solve a system of algebraic equations in order to
obtain the numerical solution at that time step. These algebraic equations are usually
solved by some iterative methods. While there are very efficient techniques available
for solving these algebraic equations, this does represent one additional complication
compared with the explicit methods.
It is quite remarkable that one can capture the large scale behavior of solutions to stiff
ODEs without the need to resolve the small scale transients, even though we are so used to
this and we tend to take it for granted. In fact, this seems to be special to systems whose
quasi-equilibrium distributions are delta functions. The same kind of philosophy does
not work for other systems for which the quasi-equilirbium distributions are non-trivial
(i.e. not delta functions), for example stochastic ODEs or highly oscillatory systems [31],
and it is unclear how useful implicit methods are for these kind of problems.
9.1.3 Stablized Runge-Kutta methods
Now we tu rn to explicit methods. As we said earlier, simple explicit schemes such
the forward Euler method are not very effective for the kind of problems discussed here.
However, composite schemes, which are sometimes formed as a composition of a large
number of forward Euler steps with different stepsizes, can be quite effective. Here we
will show how one can design such schemes in the framework of explicit Runge-Kutta
methods.
398 CHAPTER 9. PROBLEMS WITH MULTIPLE TIME SCALES
Consider the mid-point rule for the ODE ˙x = f(x):
x
n+
1
2
= x
n
+
∆t
2
f(x
n
) (9.1.26)
x
n+1
= x
n
+ ∆tf(x
n+
1
2
)
When this is applied to (9.1.22), we have
x
n+1
= R(z)x
n
(9.1.27)
where z = λ∆t
R(z) = 1 + z +
z
2
2
(9.1.28)
R is the stability polynomial of the mid-p oint rule. Since the exact solution of (9.1.22)
satisfies x(t
n+1
) = e
λz
x(t
n
) and since
e
λz
− R(z) = O(z
3
) (9.1.29)
we see that the local error is O(∆t
3
) and the global error is O(∆t
2
). Similarly for th e
classical 4th order Runge-Kutta method, its stability polynomial is
R(z) = 1 + z +
z
2
2
+
z
3
3!
+
z
4
4!
(9.1.30)
The local error is O(∆t
5
) and the global error is O(∆t
4
).
The two examples given above are examples of Runge-Kutta methods that have opti-
mal accuracy, in the sense that their order of accuracy is the maximally achievable given
the number of stages (which is the same as the number of function evaluation). The
stability region for these methods is however, quite limited.
It is possible to design Runge-Kutta methods with less accuracy but much larger
stability region. This class of methods are generally referred to as “stabilized Runge-
Kutta methods”. We will discuss a particularly interesting class of stabilized Runge-Kutta
methods, the Chebychev methods [29].
Consider an s-stage Runge-Kutta method. For consistency, its stability polynomial
has to take the form
R
s
(z) = 1 + z +
s
X
k=2
C
k
z
k
(9.1.31)
i.e. the first two terms have to match the Taylor series for e
z
. We would like to choose the
coefficients {C
k
} in order to maximize the stability region of the corresponding Runge-
Kutta method. Note that our interest is mainly in the case when the spectrum of the
9.1. ODES WITH DISPARATE TIME SCALES 399
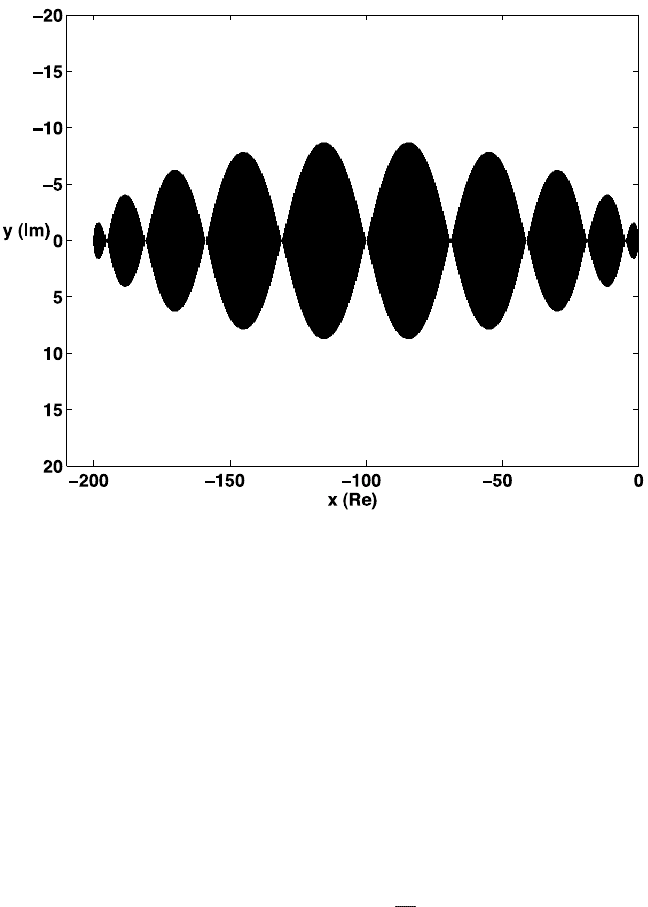
Figure 9.1: Stability region of the Chebychev metho d with s = 10 (courtesy of Assyr
Abdulle).
linearized ODE is located near the negative part of the real axis. Therefore our problem
can be formulated as:
Maximize l
s
, subject to the condition that
(−l
s
, 0) ⊂ {z : |R
s
(z)| < 1}. (9.1.32)
It is easy to see that the solution to this problem is given by
R
s
(z) = T
s
1 +
z
s
2
(9.1.33)
where T
s
is the Chebyshev polynomial of degree s. In this case, we have
l
s
= 2s
2
(9.1.34)
How do we turn this into a Runge-Kutta method? There are two ways to proceed.
The first is to write
R
s
(z) =
s
Y
j=1
(1 + c
j
z) (9.1.35)
400 CHAPTER 9. PROBLEMS WITH MULTIPLE TIME SCALES
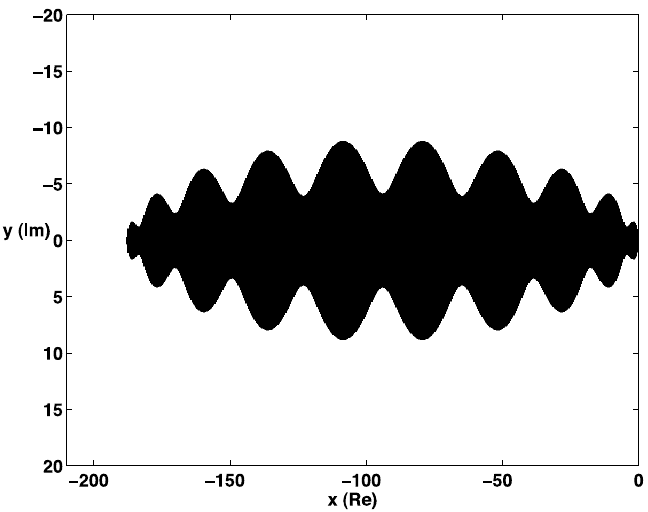
Figure 9.2: Stability region of the improved Chebychev method with s = 10, q = 0.9
(courtesy of Assyr Abdulle).
9.1. ODES WITH DISPARATE TIME SCALES 401
where the {−1/c
j
}’s are the roots of R
s
(z) which are all real and negative. Given x
n
, we
then form
x
n,0
= x
n
x
n,1
= x
n,0
+ ∆tc
1
f(x
n,0
)
x
n,2
= x
n,1
+ ∆tc
2
f(x
n,1
)
. . . . . .
x
n,s
= x
n,s−1
+ ∆tc
s
f(x
n,s−1
)
x
n+1
= x
n,s
(9.1.36)
It is easy to see that the stability polynomial of this Runge-Kutta method is given by
(9.1.33). In fact th e stability polynomial up to the k- th stage is
R
s,k
(z) =
k
Y
j=1
(1 + c
j
z) (9.1.37)
This algorithm can be thought of as being a composition of forward Euler methods with
different step sizes {c
j
∆t}. As such it can be regarded as a special case of the variable
time step methods. However, we prefer not to do so, partly due to the fact that when
formulated this way, the Chebyshev methods may suffer from the problem with internal
instabilities. Even if |R
s
(z)| < 1, there is no guarantee that |R
s,k
(z)| < 1 for all k. For
large s, the numerical errors might be amplified a lot in the intermediate stages before
they have a chance to be damped out eventually. This problem of internal instabilities
can be alleviated by ordering {c
j
} in a better way [30].
An easy way to avoid such internal instabilities is to make use of the three-term
recurrence relation for Chebyshev polynomials
T
n+1
(x) = 2xT
n
(x) − T
n−1
(x) (9.1.38)
Using this, we reformulate (9.1.36) as
x
n,0
= x
n
x
n,1
= x
n,0
+
∆t
s
2
f(x
n,0
)
. . . . . .
x
n,j+1
= 2x
n,j
− x
n,j−1
+
2∆t
s
2
f(x
n,j
)
x
n+1
= x
n,s
(9.1.39)

402 CHAPTER 9. PROBLEMS WITH MULTIPLE TIME SCALES
It is easy to check that if f(x) = λx, z = λ∆t, then
x
n,j
=
˜
T
j
(z)x
n
(9.1.40)
where
˜
T
j
(z) = T
j
(1 + z/s
2
), and T
j
is the Chebyshev polynomial of degree j. This
ensures stability for the intermediate stages, even though the scheme is no longer in the
form of a composition of forward Euler steps [24, 45].
Another point to be noted is that th e width of the stability region vanishes at the
points where T
s
= ±1. This is an undesirable feature. It can be avoided by replacing the
domain of consideration from {z : |R
s
(z)| < 1} to {z : |R
s
(z)| < q} where q is a positive
number less than 1. In this case R
s
is replaced by
˜
R
s
(z) =
1
T
s
(ω
0
)
T
s
(ω
0
+ ω
1
z) (9.1.41)
where
ω
0
= 1 +
q
s
2
, ω
1
=
T
s
(ω
0
)
T
′
s
(ω
0
)
(9.1.42)
The stability domain is shown in Figure 9.1.3. l
s
is no longer equal to 2s
2
. But it is still
O(s
2
).
So far, we have only discussed first order methods. For higher order Chebyshev
methods we refer to [5, 2]. For extension to stochastic ODEs, we refer to [3, 4]. For
obvious reasons, these methods are referred to as the Chebychev methods.
Returning to the system (9.1.9) discussed earlier, we have |λ| ∼ 1/ε. If we want
∆t|λ| ≤ O(s
2
),
then we must have
∆t ≤ O(s
2
ε)
Since the cost per step is O(s), the total cost required to advance to O(1) time is
Cost = O
s
s
2
ε
= O(
1
sε
)
The cost is O(1/ε) if we choose s to be O(1), and O(1) if we choose s to be O(1/ε).
In the latter case, however, the accuracy also deteriorates. Therefore th e optimal choice
depends on considerations of both accuracy and efficiency.
If the spectrum of the problem has a different structure, one can design stabilized
Runge-Kutta methods accordingly. For example, if the spectrum is clustered in two

9.1. ODES WITH DISPARATE TIME SCALES 403
regions separated by a gap, one can design Runge-Kutta methods whose stability regions
cover these clusters [21, 29]. It can be shown that such stabilized Runge-Kutta methods
can be considered as compositions of forward Euler steps whose step sizes cluster into
two regions [1, 29]. In other words, they are compositions of forward Euler with small
and large time steps.
9.1.4 HMM
To illustrate the idea, let us consider the simple example (6.2.1). Here the macroscale
variable of interest is x. We will assume that its dynamics is approximated accurately
by an ODE, which can be written abstractly as:
˙
¯
x = F (
¯
x, ε),
¯
x(0) = x
0
(9.1.43)
with unknown right hand side,
Since the macroscale equation takes the form of an ODE, we will select stable ODE
solvers as the macro-solver. This suggests an HMM that consists of the following:
1. The macro-solver, say forward Euler:
ˆ
x
n+1
=
ˆ
x
n
+
ˆ
F
n
∆t,
ˆ
x
0
= x
0
(9.1.44)
where ∆t is the macro time step, and
ˆ
F
n
denotes the approximate value of F (
ˆ
x
n
, ε)
that needs to be estimated at each macro time step.
2. The micro-solver: In this case, the constrained microscale model is simply the
second equation in (6.2.1) with x = x
n
. In the simplest case of a forward Euler
scheme with micro time step δt, we have:
ˆ
z
n,m+1
=
ˆ
z
n,m
+
1
ε
g(
ˆ
x
n
,
ˆ
z
n,m
, t
n
+ mδt)δt (9.1.45)
m = 0, 1, ··· .
3. A force estimator: For example, we may use a simple time-averaging to extract
ˆ
F
n
ˆ
F
n
=
1
M
M−1
X
m=0
f(
ˆ
x
n
,
ˆ
z
n,m
, t
n
+ mδt) (9.1.46)

404 CHAPTER 9. PROBLEMS WITH MULTIPLE TIME SCALES
The macroscale solver can be quite general. For example, we may also choose higher
order Runge-Kutta methods or linear multi-step methods. If we use the mid- point rule
as the macro solver, we have
ˆ
x
n+1/2
=
ˆ
x
n
+
∆t
2
ˆ
F
n
(9.1.47)
ˆ
x
n+1
=
ˆ
x
n
+ ∆t
ˆ
F
n+1/2
(9.1.48)
(9.1.49)
Here both
ˆ
F
n
and
ˆ
F
n+1/2
are unknown forces that have to be estimated from the mi-
croscale model.
One should distinguish this kind of methods from multi-time-step methods [42]. In
multi-time-step methods, different time step sizes are used for different terms in the
forcing. However, the detailed behavior of the model is computed accurately over the
whole time interval of interest. An illstrative example is as follows. Consider
˙
x = f
1
(x) + f
2
(x) (9.1.50)
Assume that for some reason, we believe f
1
varies more slowly than f
2
. Then one might
use a multi-time-step integrator of the tyep:
x
n,0
=x
n
+ ∆tf
1
(x
n
) (9.1.51)
x
n,m+1
=x
n,m
+ δtf
2
(x
n,m
), m = 0, 1, ··· , M − 1 (9.1.52)
x
n+1
=x
n,M
(9.1.53)
with M = ∆t/δt. In contrast, in HMM (or projective integrators for that matter), M is
determined by the relaxation time of the fast component of the dynamics.
If the ODE has a stochastic component, then the macroscale model might be in t he
form of stochastic ODEs. In this case, one should use a stochastic O DE solver as the
macro-solver in HMM. The simplest example is the Euler-Maruyama scheme:
x
n+1
= x
n
+ ∆t
ˆ
B
n
+ ˆσ
n
√
∆tw
n
(9.1.54)
Now both
ˆ
B
n
and ˆσ
n
need to be estimated. This can be done in a similar way as described
above. The details can be found in [11].
In the same spirit, seamless HMM can also be applied to this class of problems.

9.2. APPLICATION OF HMM TO STOCHASTIC SIMULATION ALGORITHMS405
9.2 Application of HMM to stochastic simulation al-
gorithms
First, let us review briefly the standard stochastic simulation algorithm (SSA) for
chemical kinetic systems proposed in [20, 19], also known as the Gillespie algorithm.
This is closely related to the BKL algorithm in statistical physics [6]. The general set up
for the stochastic chemical kinetic system was discussed in section 2.3.3. Suppose we are
given a chemical kinetic system with reaction channels R
j
= (a
j
, ν
j
), j = 1, 2, ··· , M
R
.
Let
a(x) =
M
R
X
j=1
a
j
(x). (9.2.1)
Assume that the current time is t
n
, and the system is at state X
n
. We perform the
following steps:
1. Generate independent random numbers r
1
and r
2
with uniform distribution on the
unit interval (0, 1]. Let
δt
n+1
= −
ln r
1
a(X
n
)
, (9.2.2)
and let k
n+1
be the natural number such that
1
a(X
n
)
k
n+1
−1
X
j=0
a
j
(X
n
) < r
2
≤
1
a(X
n
)
k
n+1
X
j=0
a
j
(X
n
), (9.2.3)
where a
0
= 0 by convention.
2. Update the time and the state of the system by
t
n+1
= t
n
+ δt
n+1
, X
n+1
= X
n
+ ν
k
n+1
. (9.2.4)
Then repeat.
In this algorithm, r
1
is used to update the clock and r
2
is used to select the particular
reaction to be executed.
As we explained in section 2.3.3, in practice, the reaction rates often have very dis-
parate magnitudes. This can be appreciated from the reaction rate formula from tran-
sition state theory (see next chapter): The rates depend exponentially on the energy
barrier. Therefore a small difference in the energy barrier can result in a large difference

406 CHAPTER 9. PROBLEMS WITH MULTIPLE TIME SCALES
in the rate. In such a case, we are often interested more in the slow reactions since
they the bottlenecks for the overall dynamics. A t heory for the effective dynamics was
described in section 2.3.3. However, it might be quite difficult to compute the effective
reaction rates in the effective dynamics either analytically or by precomputing. There-
fore various strategies have been proposed to capture the effective dynamics of t he slow
variables “on-the-fly”. We will discuss an algorithm proposed in [12] which is a simple
modification of the original SSA, by adding a nested structure according to the time scale
of the rates. The process at each level of the time scale is simulated with an SSA with
some effective rates. Results from simulations on fast time scales are used to compute
the rates for the SSA at slower time scales. For simple systems with only two time scales,
the nested SSA consists of two SSAs organized with one nested in the other: An outer
SSA for the slow reactions only, but with modified slow rates which are computed in an
inner SSA modeling fast reactions only.
Let t
n
, X
n
be the cu rrent time and state of the system respectively. The two-level
nested SSA proceeds as follows:
1. Inner SSA: Pick an integer N. Run N independent replicas of SSA with the
fast reactions R
f
= {(ε
−1
a
f
, ν
f
})} only, for a time interval of T
0
+ T
f
. During this
calculation, compute the modified slow rates for j = 1, ··· , M
s
˜a
s
j
=
1
N
N
X
k=1
1
T
f
Z
T
f
+T
0
T
0
a
s
j
(X
k
τ
)dτ, (9.2.5)
where X
k
τ
is the result of the k-th replica of this auxiliary virtual fast process at
virtual time τ whose initial value is X
k
t=0
= X
n
, and T
0
is a parameter we choose
in order to minimize the eff ect of the transients to the equilibrium in the virtual
fast process.
2. Outer SSA: Run one step of SSA for the modified slow reactions
˜
R
s
= ( ˜a
s
, ν
s
)
to generate (t
n+1
, X
n+1
) from (t
n
, X
n
).
Then repeat.
In the HMM language, the macro-scale solver is the outer SSA, the data that need
to be estimated is the effective rates for the slow reactions. These data are obtained by
simulating the virtual fast process which plays the role of the micro-scale solvers here.