Второв В.Б. Конспект лекций по ТАУ
Подождите немного. Документ загружается.

Стандартные полиномы
pD
n
.
Полиномы со стандартной картиной расположения корней на плоскости.
1. Полиномы Баттерворта.
01
ppD
2
00
2
2
414.1
pppD
3
0
2
0
2
0
3
3
22
ppppD
4
0
3
0
22
0
3
0
4
4
613.2414.3613.2
pppppD
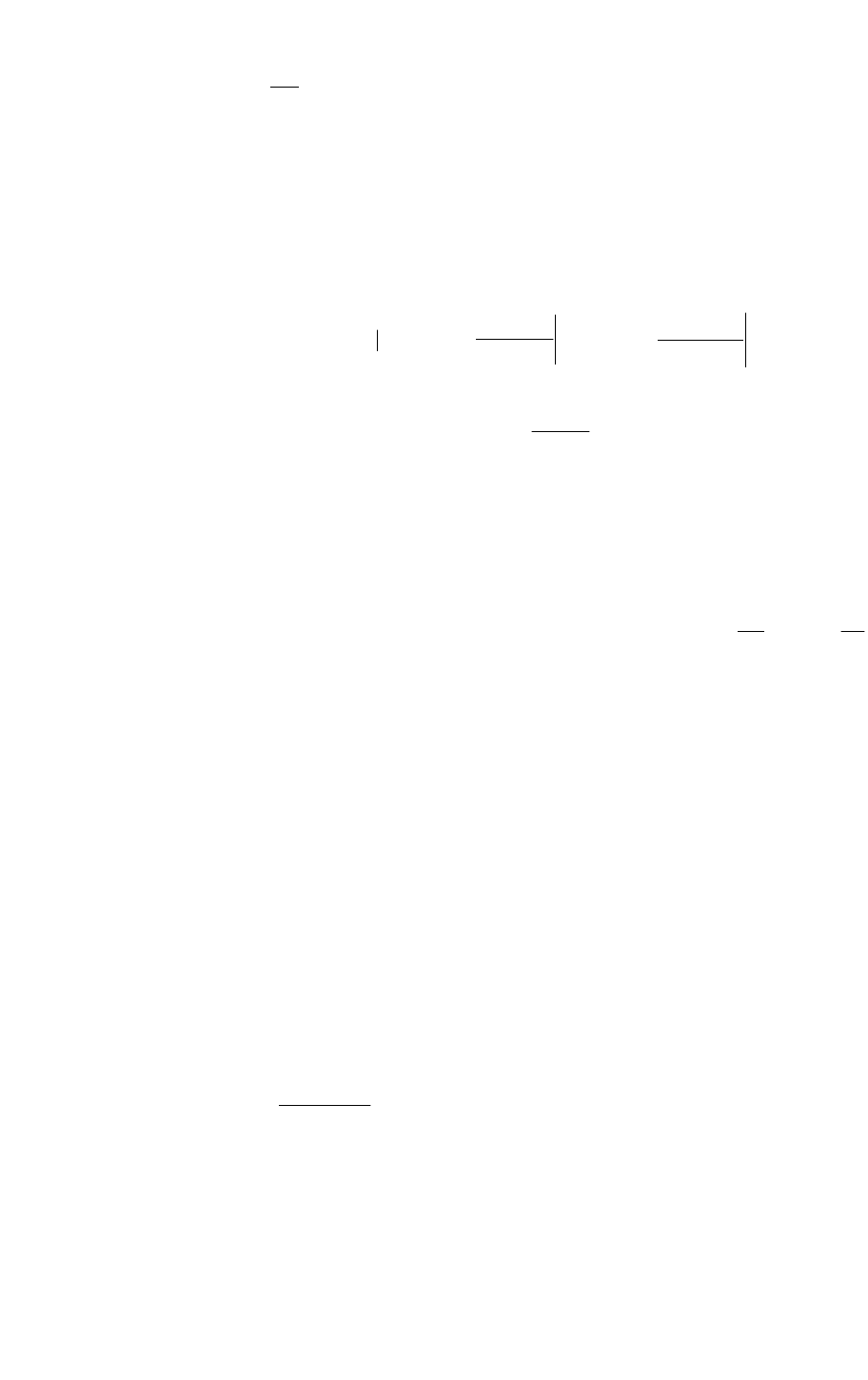
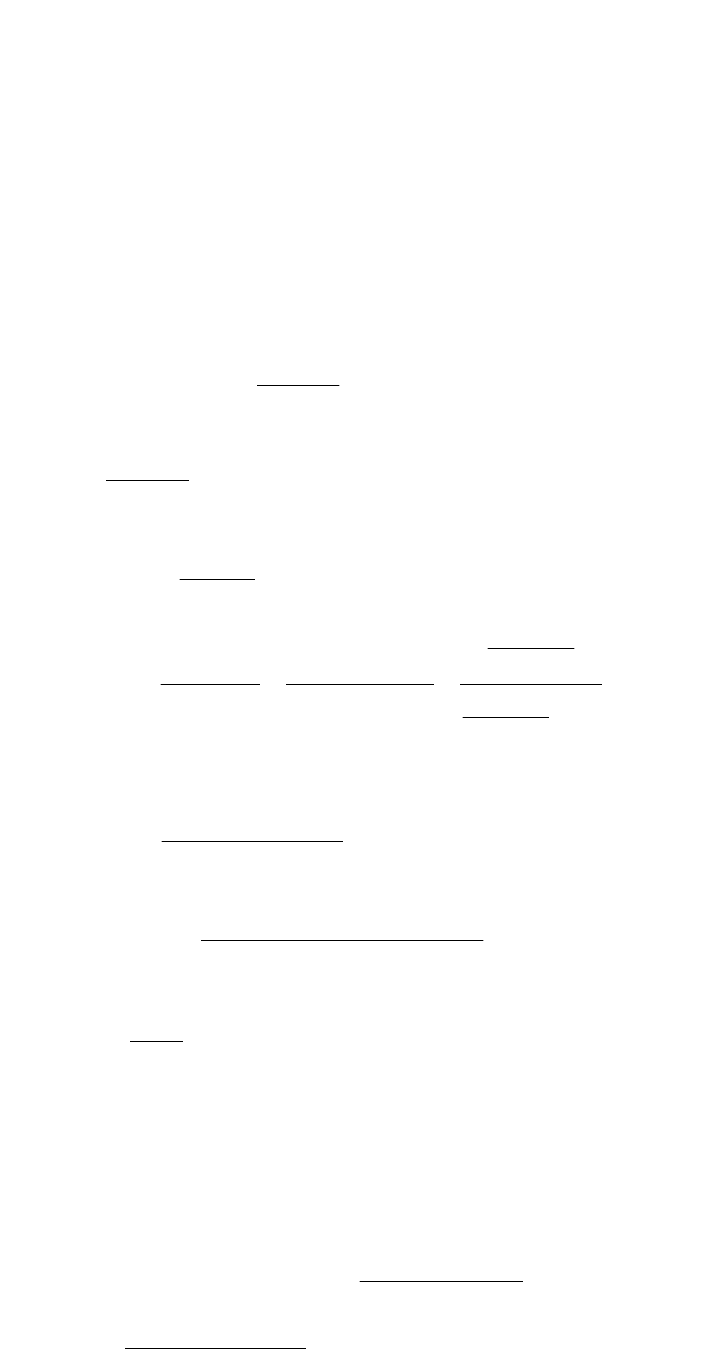
Корни этих полиномов располагаются на окружности радиусом
0
на
одинаковом условном расстоянии друг от друга симметрично оси вещественных.
n = 1 n = 2 n = 3
I m
R e
-
w
0
-
w
0
-
w
0
9 0
Å
nn
pppppppD
21
2. Биноминальные полиномы
n
n
ppD
0
0,,2,1
n
p
Существуют и другие стандартные полиномы:
nnnn
n
pfpfppD
0
22
02
1
01
(23.6)
11
,,
n
ff
коэффициенты определяющие вид переходной характеристики
системы с передаточной функцией
pD
n
n
0
(23.7)
nn
nn
ppppppppD
021
n
n
n
n
pppD
021
10
n
n
n
ppp
210
1
таким образом
0
есть средний геометрический корень стандартного
полинома. Если
0
увеличить в
k
раз в системе с передаточной функцией (23.6),
(23.7), то вид ПХ не изменится, но она сожмется по оси времени в
k
раз.
§24. Точность САУ.
Степень близости
te
к
tg
:
t
tete
(24.1)
Установившаяся ошибка. Она возникает как от
tg
так и от
tf
. Поэтому
te
имеет две составляющие:
tetete
fg
(24.2)
61

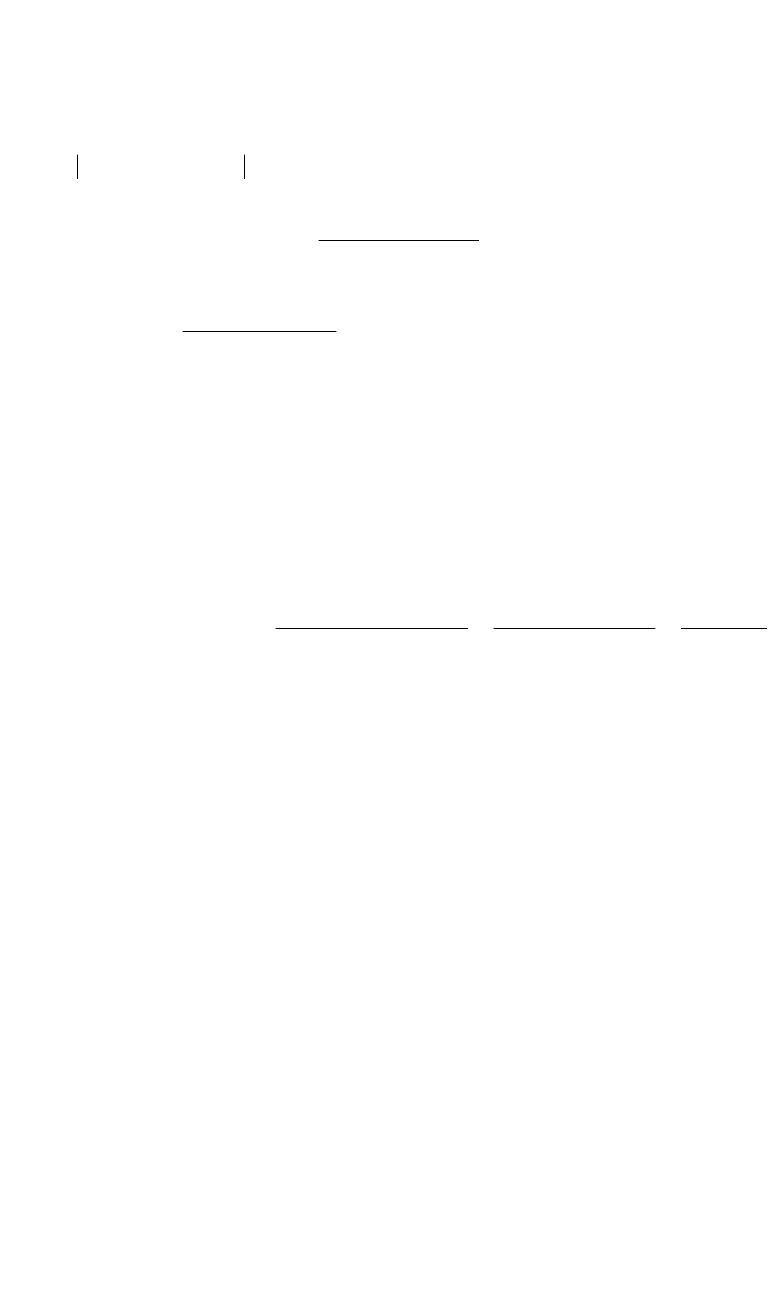
W
1
( p ) W
2
( p )
g e y
f
-
+
Перерисуем схему так, чтобы выходом стала ошибка
k
1
R
1
( p )
p
u
1
Q
1
( p )
k
2
R
2
( p )
p
u
2
Q
2
( p )
u e
W
ï ð
( ð )
W
î ñ
( ð )
u
это
g
, либо
f
.
Если
gu
, то
21
,1 WWpWpW
ocпр
;
Если
fu
, то
1,
2
pWWpW
ocпр
;
2121
,,, QQRR
полиномы с единичными свободными членами.
2,1;100 iQR
ii
(24.3)
Согласно теореме о конечном значении:
Если
)()( teLpE
, то
ppEe
p 0
lim
(24.4)
Передаточная функция для ошибки.
k
1
R
1
( p )
p
u
1
Q
1
( p )
k
2
R
2
( p )
p
u
2
Q
2
( p )
u e
W
ï ð
( ð )
W
î ñ
( ð )
pRpRkkpQpQp
PQpRpk
pU
pE
pW
e
212121
211
21
2
(24.5)
62

pU
pRpRkkpQpQp
PQpRpk
ppUppWe
p
e
p
212121
211
0
5.24
0
5.24
4.24
21
2
limlim
(24.6)
1. Постоянное воздействие:
constUtU
0
p
U
pU
0
0
21
(нет интегратора)
k
Uk
p
U
pRpRkkpQpQp
PQpRpk
pe
p
1
lim
01
3.24
0
212121
211
0
6.24
21
2
(24.7)
где
21
kkk
контурный коэффициент усиления……….
Согласно (24.7)
constUe
0
~
. Система в которой установившаяся
ошибка при постоянном входном воздействии постоянна и
пропорциональна этому воздействию называется астатической.
1;0
21
(один интегратор в обратной связи по ошибке)
0lim
0
212121
211
0
p
U
RRkkQpQ
QpRk
pe
p
астатическая система.
2. Линейное воздействие:
tu
2
p
pU
0
21
(статическая система)
0lim
2
212121
211
0
pRRkkQpQ
QRpk
pe
p
1;0
21
(астатическая система)
221
1
3.24
2
212121
211
0
lim
kkk
k
pRRkkQpQ
QRpk
pe
p
. В астатической системе
(системе с астатизмом первого порядка) установившаяся ошибка отработки
линейного воздействия постоянна и пропорциональна скорости изменения
этого воздействия.
Коэффициент ошибок.
Рассмотрим полиномиальное воздействие:
m
m
t
m
tttu
!!2
2
2
10
(24.8)
Разложим
pW
e
в ряд:
n
n
e
p
n
C
p
C
pCCpW
!!2
2
2
10
(24.9)
Этот ряд сходится к
pW
e
при
tp 0
;
pUp
n
C
p
C
pCCpE
n
n
!!2
2
2
10
5.24
(24.10)
63
Перейдем к оригиналам: (при этом
tepE
, поскольку рассматриваем
tp 0
).
tU
C
tUCtUCte
..
2
10
!2
(24.11)
Коэффициенты
10
,CC
и т.д. называются коэффициентами ошибок.
Ряд (24.11) ограничен, поскольку согласно (24.8)
0tu
k
при
mk
.
Способы нахождения коэффициентов ошибок.
1. Громоздкий.
Согласно (24.9)
0
0
p
e
pWC
;
0
1
p
e
dp
pdW
C
;
0
2
2
2
p
e
dp
pWd
C
2. Основной.
Разложим передаточную функцию
pD
pR
pW
e
e
в ряд путем деления
pR
e
на
pD
, причём оба полинома должны быть записаны в порядке возрастания
степеней
p
. После чего сравнить полученный ряд с (24.9), откуда получить
10
,CC
и т.д.
Порядок астатизма:
Определение 24.1. говорят, что система имеет астатизм
го
порядка
относительно данного воздействия
tu
, если при
ttttu
i
!!2
2
2
10
(24.12)
установившаяся ошибка постоянна и пропорциональна
.
Замечание 1: система с астатизмом нулевого порядка называется статической, а
система с астатизмом первого порядка называется астатической.
Замечание 2:Если система имеет
порядок, то
0
110
v
CCC
,
0
C
(24.13)
Доказательство: Согласно (24.12)
tu
зависит от
t
,
tu
зависит от
1
t
.
tu
не зависит от
t
.
Чтобы в (24.11)
te
не зависела, необходимо (24.13).
Замечание 3: следствие из замечания 2. Если на систему с
порядком
астатизма подать
tu
(24.8), причем
m
, то ее
0
e
.
Способы определения порядка астатизма.
1. Записать
pW
e
как
pN
pMkp
s
,
100 NM
, тогда
s
.
2. Порядок астатизма равен ……….. первому отличного от нуля коэффициента
ошибки (смотри замечание 2).
3. Порядок астатизма равен числу интеграторов неохваченных местными обратными
связями в обратной связи по ошибке.
Добротность.
Пусть
ttg
и
1
g
. Система имеет первый порядок астатизма относительно
задающего воздействия
0
0
C
,
0
1
C
.
64

110
11.24
0 CtgCgCte
(24.14)
Определение 24.2. Добротностью (по скорости) системы с астатизмом первого порядка
называется отношение
e
D
(24.15)
где
скорость изменения линейного входного воздействия;
consttee
установившаяся ошибка отработки этого воздействия.
Из (24.14) и (24.15) следует, что
1
1
C
D
(24.16)
Можно показать, что
1
1
1
k
C
(24.17)
где
k
контурный коэффициент усиления.
Из уравнения (24.16) и (24.17) находим
kD
, (24.18)
т.е. добротность числено равна контурному коэффициенту.
§ 25. Синтез САУ.
Цель: Создание системы, удовлетворяющей заданным требованиям точности и
качествам динамики.
Классический алгоритм синтеза.
1. Расчет основного регулятора, обеспечивающего заданную точность. Например: П-,
И-, или ПИ-регулятор.
2. Расчет дополнительного корректирующего устройства (КУ) с целью
стабилизировать систему, если она не устойчива, и придать ей нужные значения
показателей качества динамики. Различают:
синтез в частотной области, предусматривающий формирование желаемой
ЛАХ и расчет КУ.
аналитический синтез алгебраическими методами (см. пример далее расчет
модального регулятора).
W í ñ ( p )
W n ( p )
-
ÊÎÌÏÀÑ-3D LT V7 (íåêîììåð÷åñêàÿ âåðñèÿ)
ÊÎÌÏÀÑ V7 (ñ) 2003-2004 ÇÀÎ ÀÑÊÎÍ, Ðîññèÿ. Âñå ïðàâà çàùèùåíû.
)( pW
П
Передаточная функция последовательного корректирующего устройства.
)()()()( pWpWpWpW
ЖНСПСК
)(
)(
)(
pW
pW
pW
СК
Ж
П
(25.1)
)()()(
НСЖП
LLL
(25.2)
Таким образом, методика синтеза последовательного корректирующего устройства:
65
1. Найти ЛАХ последовательного корректирующего устройства: вычитаем
HC
L
из
Ж
L
.
2. По
П
L
записать
pW
П
.
3. По
)( pW
П
с помощью справочника определить схему пассивного или активного
корректирующего устройства и рассчитать его параметры. Иногда (в простых
случаях) вместо формирования
Ж
L
просто подбирают последовательное
корректирующее устройство из числа типовых, зная, как различные КУ влияют на
ЛЧХ.
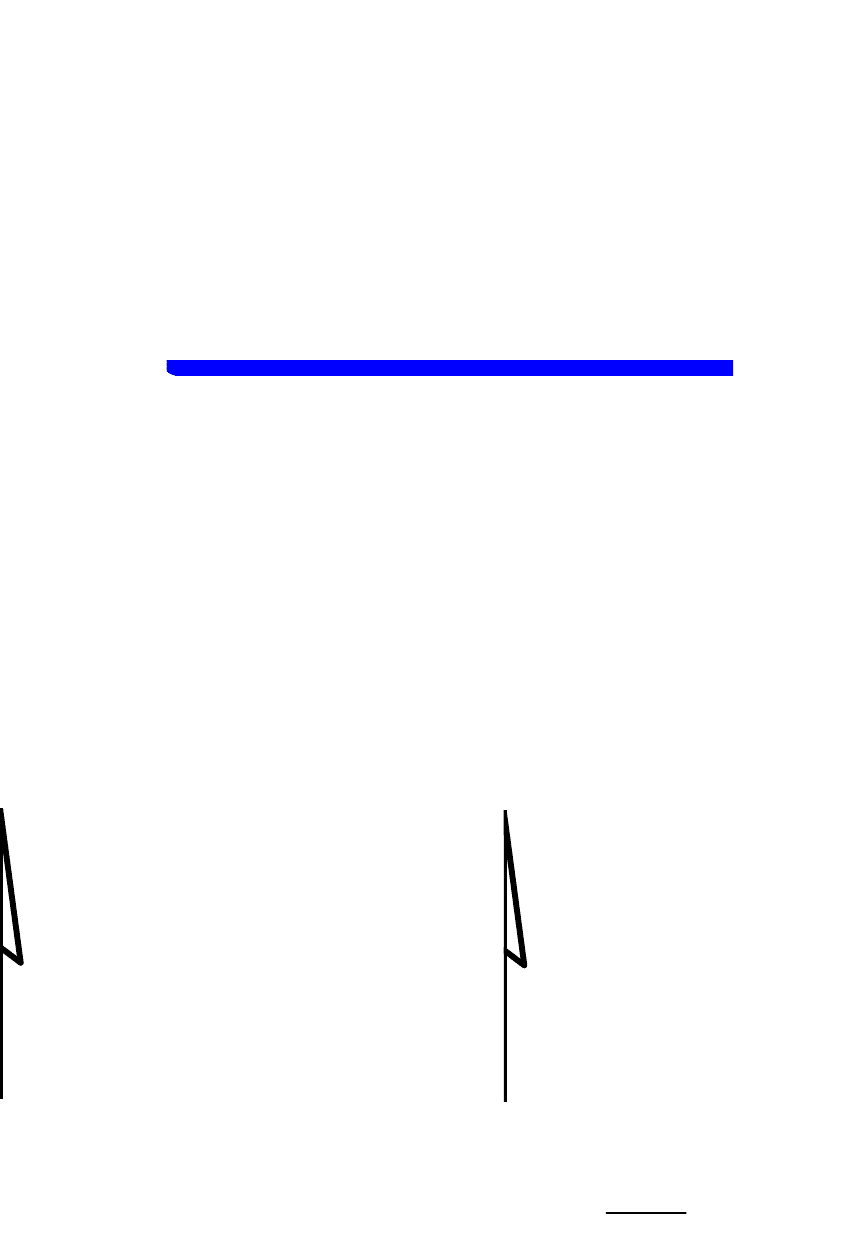
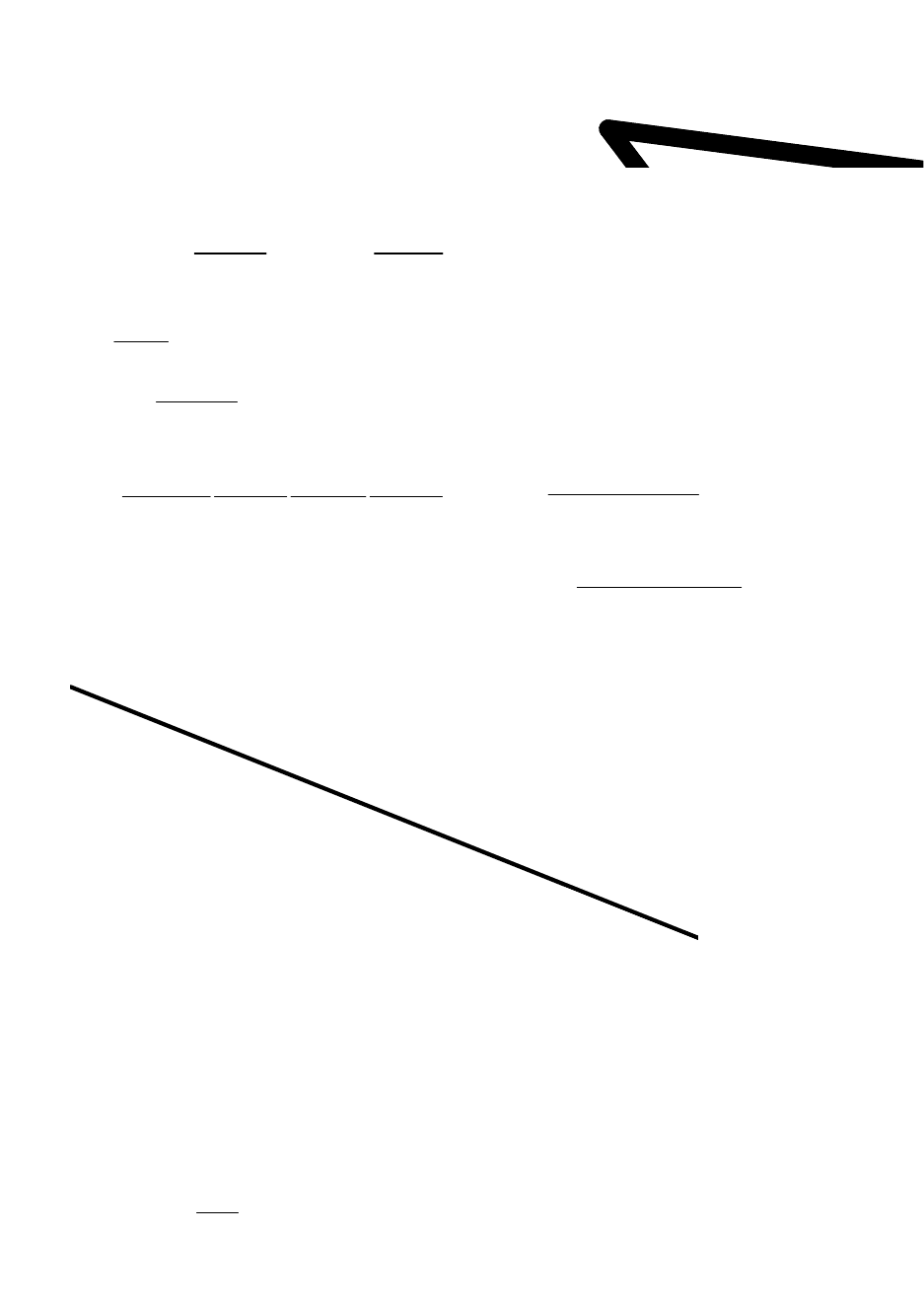
Методы последовательной коррекции. Типовые последовательные КУ.
1. П-регулятор:
пп
kpW )(
– пропорциональное.
2 0 l g k
Ï
w
c 1
w
c 2
Пусть
с
мала, следовательно,
p
t
велико. При увеличении
п
k
, увеличивается
с
, следовательно, сначала
p
t
уменьшается, но поскольку
тоже уменьшается
(запас по фазе), то
увеличивается, следовательно,
p
t
увеличивается.
t
ï
ÊÎÌÏÀÑ-3D LT V7 (íåêîììåð÷åñêàÿ âåðñèÿ)
ÊÎÌÏÀÑ V7 (ñ) 2003-2004 ÇÀÎ ÀÑÊÎÍ, Ðîññèÿ. Âñå ïðàâà çàùèùåíû.
2. ПД-регулятор (пропорционально-дифференциальный):
pkkpW
Dпп
)(
, например
1TppW
n
, реально
1
1
pT
Tp
.
66
ÊÎÌÏÀÑ-3D LT V7 (íåêîììåð÷åñêàÿ âåðñèÿ)
ÊÎÌÏÀÑ V7 (ñ) 2003-2004 ÇÀÎ ÀÑÊÎÍ, Ðîññèÿ. Âñå ïðàâà çàùèùåíû.
- 1
L
ï
L
ñ ê
- 2
L
í ñ
j
ï
нс
и
ск
обеспечивают запас по фазе
0
n
.
3. ПИ-регулятор:
р
р
p
K
kpW
n
nn
1
)(
w
c 1
w
c 2
2 0 l g
b
1
t
с
увеличилось (аналогично П-регулятору);
Повысился порядок астатизма (на 1) как по задающему, так и по
возмущающему воздействиям.
4. ПИД-регулятор:
)1(
1)(1(
)(
1
21
p
pp
pk
р
k
kрW
D
п
пп
;
)(
21
Реально в знаменателе
)1(
1
p
, где
)(
2
.
2 0 l g
b
- 1 + 1
1
t
1
1
t
2
1
t
m
Третий участок обеспечивает подъем фазы на определенном участке частот.
Параллельная коррекция.
Осуществляется обычно в виде местной обратной связи.
Например:
67
W
í î
( ð ) W
o
( p )
W
o c
( p )
-
-
g
y
U
o c
Обратные связи бывают:
1. Жесткие: действуют как переходных процессах, так и в установившемся режиме:
осос
kpW )(
;
1
)(
pT
k
pW
ос
ос
ос
.
2. Гибкие: действуют только в переходных процессах.
1
)(
)(
pT
pk
pW
ос
ос
ос
Если
consty
, то
0
oc
U
Пусть
1
)(
pT
k
pW
о
о
охв
,
осос
kpW )(
1
1
1
11
0
0
...
p
kk
T
kk
k
kkpT
k
WW
W
W
осо
осо
о
осо
о
осо
о
контвнутрзам
Таким образом, жесткая обратная связь (отрицательная) уменьшает
коэффициент передачи и постоянную времени охваченной части.
Пусть
12
00
22
0
pTpT
k
W
о
о
,
)1(
;
pTW
осос
(25.1)
1)2(
000
22
0
0
..
pTkTpT
k
W
ос
контвнутрзамк
01000
22 TTkT
ос
0
0
01
2T
Tk
ос
, т.е.
01
Гибкая обратная связь оказывает демпфирующее действие на охваченную
часть. Гибкую обратную связь не применяют, если
pW
o
первого порядка,
поскольку это привело бы к увеличению инерционности охваченной части.
По передаточной функции последовательного корректирующего устройства
можно найти передаточную функцию эквивалентного параллельного
корректирующего устройства, хотя полная эквивалентность невозможна.
pWpW
рW
рWрWрWрW
oco
о
нонспск
1
pWpW
pW
oco
п
1
1
(25.3)
68
pWpWpW
onoc
11
1
(25.4)
Точная реализация (25.4) невозможна, поскольку степень числителя больше
степени знаменателя, следовательно, потребуем, чтобы в существенном диапазоне
частот (НЧ + СЧ) выполнялось неравенство:
1
jWjW
oco
(25.5)
тогда в (25.3)
jWjW
jW
oco
n
1
(25.6)
jWjW
jW
no
oc
1
, отсюда
nooc
LLL
(25.7)
Остальные детали синтеза смотри в курсовой работе.
Достоинства параллельной коррекции:
Обычно она проще, чем последовательная;
Если выполнено неравенство (25.5), то вариации параметров и даже
структуры охваченной части будут мало влиять на динамические
свойства всей системы.
jWjWjW
jW
jWjW
jW
jW
ococo
o
oco
o
контзамвнутр
1
1
...
§26. Системы подчиненного регулирования (СПР).
Они построены по каскадному принципу, т. е. с вложенными друг в друга
контурами. Рассмотрим двухконтурную систему:
P
2
Ð
1
y * y
-
-
î á ú å ê ò ó ï ð à â ë å í è ÿ
Î
ì 1
Î
î 1
Î
î 2
z *
Î
m
2
ÊÎÌÏÀÑ-3D LT V7 (íåêîììåð÷åñêàÿ âåðñèÿ)
ÊÎÌÏÀÑ V7 (ñ) 2003-2004 ÇÀÎ ÀÑÊÎÍ, Ðîññèÿ. Âñå ïðàâà çàùèùåíû.
21
,PP
– регуляторы;
O
– объект;
21
,
OO
– звенья с малыми постоянными времени;
0201
,OO
– звенья с большими постоянными времени.
Внутри каждого контура регулятор выполняет функцию корректирующего устройства.
Регулятор
гоi
контура вырабатывает задающее воздействие для подчиненного
внутреннего контура
1i
.
Типовая структура одного контура:
69
W p ( p )
W
m
( p )
W o ( p )
Ð å ã ó ë ÿ ò î ð
Ç â å í ü ÿ ñ ì à ë û ì è
ï î ñ ò î ÿ í í û ì è
â ð å ì å í è
Ç â å í ü ÿ ñ á î ë ü ø è ì è
ï î ñ ò î ÿ í í û ì è
â ð å ì å í è
ÊÎÌÏÀÑ-3D LT V7 (íåêîììåð÷åñêàÿ âåðñèÿ)
ÊÎÌÏÀÑ V7 (ñ) 2003-2004 ÇÀÎ ÀÑÊÎÍ, Ðîññèÿ. Âñå ïðàâà çàùèùåíû.
Стандартная настройка на оптимум по модулю (ОМ).
Пусть
1
)(;
1
)(
0
0
0
pT
k
pW
pk
k
pW
. Чтобы настроить контур тока на оптимум по
модулю необходимо применить ПИ-регулятор с передаточной функцией:
p
p
pW
p
1
)(
, причем его параметры должны быть определены по формулам:
0
0
0
2
;
kkT
T
T
(26.1)
Передаточная функция разомкнутой системы:
11
1
2
)(
0
0
0
0
0
0
pT
k
pT
k
pT
pT
kkT
T
pW
,
)1(2
1
)(
pTpT
pW
(26.2)
Передаточная функция замкнутой системы:
122
1
)(
2
pTpT
pW
з
(26.3)
2 0 l g (
b
)
L ð
L
L
m
+
L
o
1 /
t
1 / T
m
g
= 6 3
- 9 0
- 1 8 0
-
1
1 / T o
-
2
ÊÎÌÏÀÑ-3D LT V7 (íåêîììåð÷åñêàÿ âåðñèÿ)
ÊÎÌÏÀÑ V7 (ñ) 2003-2004 ÇÀÎ ÀÑÊÎÍ, Ðîññèÿ. Âñå ïðàâà çàùèùåíû.
с
увеличивается, следовательно, увеличивается быстродействие. Идея настройки на
ОМ – скомпенсировать большую постоянную времени
0
T
, из-за которой частота среза
c
была мала и система обладала невысоким быстродействием. После компенсации
частота среза
T
c
2
1
, т.о. быстродействие теперь определяется только малой
постоянной времени. Кроме того, система приобрела астатизм первого порядка по
возмущающему и задающему воздействиям. Компенсация малой постоянной времени
T
нецелесообразна, т. к. снижается помехозащищенность системы из-за чрезмерного
расширения полосы пропускания.
Передаточная характеристика замкнутой системы.
70