Валькова Т.А. и др. Теоретическая механика
Подождите немного. Документ загружается.

Общее уравнение динамики (21.20) впервые было установлено
Лагранжем. Оно содержит в себе всю информацию о движении
механической системы под действием заданных активных сил. Соотношение
(21.20) на самом деле не является одним уравнением, а содержит в себе
количество уравнений, равное числу
S степеней свободы системы, которое
соответствует числу независимых возможны перемещений.
Общее уравнение динамики (21.20) также называется
принципом
Даламбера–Лагранжа
. Он заключается в том, что соотношение (21.20) уста-
навливает необходимое и достаточное условие действительного движения
механической системы:
истинное движение из всех кинематически
возможных выделяется тем, что для него и только для него в данный
момент времени сумма элементарных работ активных сил и сил инерции на
любых возможных перемещениях равна нулю.
Следует подчеркнуть, что этот
принцип можно использовать в качестве основной аксиомы механики, так
как из него можно вывести как уравнения равновесия, прировняв модули сил
инерции точек системы нулю, так и дифференциальные уравнения движения
механической системы.
Важным свойством общего уравнения динамики (21.20) является то,
что оно не содержит реакций идеальных связей. Это позволяет, решить
задачу о движении механической системы, не определяя этих реакций.
Отметим, что общее уравнение динамики может быть применено и для
неидеальных связей, наложенных на систему. В этом случае с учетом
разложения сил реакций на
нормальные составляющие и силы трения можно
воспользоваться уравнением (21.20), отнеся силы трения к активным силам,
действующим в системе. Это, в свою очередь, приводит к необходимости
введения экспериментального закона трения, с помощью которого
устраняется несоответствие числа уравнений и числа неизвестных в них при
не-идеальных связях.
ЛЕКЦИЯ 22
Обобщенные координаты и обобщенные силы
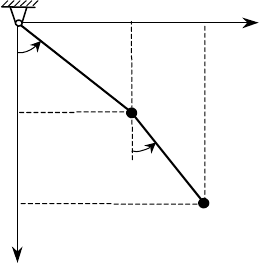
Для введения понятия обобщенных координат рассмотрим плоский
двойной математический маятник, состоящий из двух невесомых стержней
длиной
l
1
и l
2
с точечными массами M
1
и M
2
на концах (рис. 22.1). Система
обладает двумя степенями свободы. Действительно стержень
ОМ
1
может
вращаться вокруг неподвижной горизонтальной оси
О, перпендикулярной
плоскости движения
хОу, а стержень M
1
M
2
– вокруг горизонтальной оси,
проходящей через точку
M
1
, в той же плоскости. Поэтому уравнения связей
имеют вид
z
1
= 0, z
2
= 0,
222
11 11
0f
х
у l.
.0
2
2
2
12
2
122
lyyxxf
Так как
n =2, а число уравнений связей k = 4, то
S = 3n – k. = 2, т. е. лишь две из шести
декартовых координат являются независимыми и
должны быть заданы. Остальные же координаты
можно выразить из уравнений связей через
независимые координаты.
На практике координаты
х
1
, у
1
, z
1
, х
2
, у
2
, z
2
выражают через какие-либо
независимые переменные другой природы, в нашем случае ими
являются углы
1
и
2
отклонения стержней от вертикали:
х
1
= l
1
cos
1
, y
1
= l
1
sin
1
, z
1
=0,
x
2
= l
1
cos
1
+ l
2
cos
2
, y
2
= l
1
sin
1
+ l
2
sin
2
, z
2
=0. (22.1)
Здесь углы
1
и
2
играют роль независимых параметров, однозначно
определяющих положение рассматриваемой механической системы.
Пусть теперь имеется система
n материальных точек, на которую
наложены
k голономных связей, заданных уравнениями (20.2). Поскольку
число степеней свободы равно
S, то введем независимые переменные q
1
, q
2
,
..., q
s
. Тогда для рассматриваемой системы соотношения (22.1) примут вид
x
= x
(q
1
, q
2
, ..., q
s
, t);
у
= у
(q
1
, q
2
, ..., q
s
, t); ( = 1, 2, …, n)
z
= z
(q
1
, q
2
, ..., q
s
, t);
или
νν
rr
(q
1
, q
2
, ..., q
s
, t); ( = 1, 2, …, n). (22.2)
Отметим, что независимые координаты q
m
(m = 1, 2, …, s) – это не
обязательно набор
S переменных из числа декартовых координат x
, у
, z
.
Ими могут быть переменные другой природы, так в приведенном выше
примере вместо декартовых координат введены угловые координаты.
S независимых параметров q
1
, q
2
, ..., q
s
однозначно определяющих
положение точек материальной системы, совместимое со связями,
называются обобщенными координатами
.
Производные от обобщенных координат по времени
12
, , ...,
s
qq q
&& &
называются
обобщенными скоростями (
/
mm
qdqdt
&
).
О
2
1
х
1
х
2
у
1
у
2
у
х
l
2
l
1
M
1
M
2
Рис. 22.1
Размерность обобщенной скорости зависит от размерности
обобщенной координаты: если
q
m
– линейная величина, то
m
q
– линейная
скорость; если
q
m
– угол, то
m
q
– угловая скорость; если q
m
– площадь, то
m
q
– секторная скорость и т. д. Следовательно, понятие обобщенной скорости
охватывает все известные нам понятия о скоростях.
Для введения понятия обобщенных сил рассмотрим голономную
систему, состоящую из
n материальных точек, на которые действуют
соответственно силы
1
F
r
,
2
F
r
, ...,
n
F
.
Пусть система имеет
S степеней свободы, и ее положение определяется
обобщенными координатами
q
1
, q
2
, ..., q
s
. Сообщим системе в фиксированный
момент времени такое возможное перемещение, при котором обобщенная
координата
q
m
приобретает приращение q
m
0, а остальные обобщенные
координаты не изменяются. Тогда каждый радиус-вектор
ν
r
r
получит
возможное перемещение (
ν
δr
r
)
m
, которое вычисляется как частный
дифференциал:
(
ν
δr
r
)
m
=
ν
δ
m
m
r
q
q
r
. (22.3)
Согласно (21.9) возможную работу всех активных сил при q
m
> 0 можно
записать в виде
11 2 2
δ (δ )(δ )... (δ )
mm mnnm
А Fr Fr F r
rr r
rr r
ν12
12 ν
ν 1
δ δ ... δ δδ,
n
n
mmnm mmm
mm m m
rr
rr
F
qF q F q F qQq
qq q q
rr
rr
rr r r
&
где
ν
ν
ν 1
δ
.
δ
n
m
m
mm
А
r
QF
qq
r
r
(22.4)
Величина
m
Q
называются обобщенной силой, соответствующей
обобщенной координате q
m
.
Если всем
S обобщенным координатам в данный момент времени
сообщить положительные приращения (вариации)
q
1
, q
2
, ..., q
s
, то в
обобщенных координатах полная возможная работа всех активных сил равна:
11 2 2
11
δδ δ δ δ ... δ
SS
mmm SS
mm
A
AQqQqQq Qq
. (22.5)
Из выражения (22.5) следует, что обобщенные силы представляют собой
коэффициенты при вариациях обобщенных координат в выражении для
виртуальной работы.
Проецируя (21.4) на декартовые оси, получим
ν
νν
ννν
ν 1
()
n
mx y z
mmm
х
у z
QF F F
qqq
. (22.6)
Если все действующие силы
ν
F
r
потенциальные, то их проекции F
x
, F
y
, F
z
на декартовые оси могут быть выражены через потенциальную энергию П
системы согласно формулам (17.18):
ν
ν
П
;
x
F
x
ν
ν
П
;
y
F
у
ν
ν
П
z
F
z
. (22.7)
Подставив (22.7) в (22.6), получим:
ννν
ν 1
ννν
ППП П
.
n
m
mmmm
хуz
Q( )
xq у qzq q
Для механической системы, находящейся в потенциальном силовом поле,
обобщенная сила
m
Q
определяется взятой с обратным знаком частной
производной от потенциальной энергии по соответствующей обобщенной
координате
:
12
П( , , ..., )
S
m
m
qq q
Q
q
. (22.8)
Отметим, что размерность обобщенной силы равна размерности
работы, деленной на размерность обобщенной координаты.
Принцип возможных перемещений
в обобщенных координатах
Согласно принципу возможных перемещений (21.12), необходимым
и достаточным условием равновесия голономной материальной системы,
подчиненной идеальным стационарным связям, является равенство нулю
возможной работы действующих активных сил,
A = 0. В обобщенных
координатах для системы с
S степенями свободы это условие с учетом (22.5)
принимает вид
Q
1
q
1
+ Q
2
q
2
+…+ Q
s
q
s
= 0. (22.9)
Поскольку q
1
, q
2
, ..., q
s
– независимые вариации обобщенных координат,
то выражение (22.9) выполняется только тогда, когда все обобщенные силы
одновременно равны нулю, т. е.
Q
1
= 0, Q
2
= 0, …, Q
s
= 0. (22.10)
Уравнения (22.10) выражают принцип возможных перемещений
в обобщенных координатах
: для равновесия материальной системы
необходимо и достаточно, чтобы все обобщенные силы, соответствующие
выбранным для системы обобщенным координатам, были равны нулю.
Если обобщенные силы зависят не только от обобщенных координат,
но и от обобщенных скоростей
1
q
&
,
2
q
&
, ...,
s
q
, то в (22.10) все обобщенные
скорости нужно приравнять нулю. Из (22.10) следует, что количество
уравнений равновесия равно числу обобщенных координат, т. е. числу
S
степеней свободы системы.
Для консервативной системы условия равновесия (22.10) имеют вид
П
0
m
q
(m = 1, 2, …, s). (22.11)
Полный дифференциал потенциальной энергии П(q
1
, q
2
, ..., q
s
) системы
определяется выражением
dП(q
1
, q
2
, ..., q
s
) =
12
1
П(, ,..., )
.
S
s
m
m
m
qq q
dq
q
Следовательно, с учетом (22.11)
dП(q
1
, q
2
, ..., q
s
) = 0. (22.12)
Условие (22.12) означает, что в положении равновесия потенциальная
энергия консервативной системы принимает экстремальное значение.
Следовательно,
решения системы уравнений (22.11)–(22.12) определяют
обобщенные координаты
00 0
12
, , ...,
S
qq q
, соответствующие положению
равновесия системы.
Положение равновесия системы может быть
устойчивым,
неустойчивым и безразличным
. Например, физический маятник (рис. 19.3, а)
имеет два возможных положения равновесия – это положения, при которых
центр масс маятника находится в верхней и нижней точках своей траектории.
Очевидно, что верхнее положение равновесия маятника практически нельзя
осуществить, оно является неустойчивым; нижнее положение легко
реализуемо, это устойчивое положение равновесия.
Устойчивость или неустойчивость положения равновесия определяется
поведением системы при воздействии
на нее малых возмущений.
Если при достаточно малых отклонениях от положения равновесия или
достаточно малых начальных скоростях система во все время движения не
выходит из пределов сколь угодно малой заданной окрестности положения
равновесия, имея при этом сколь угодно малые скорости, то это положение
равновесия является
устойчивым.
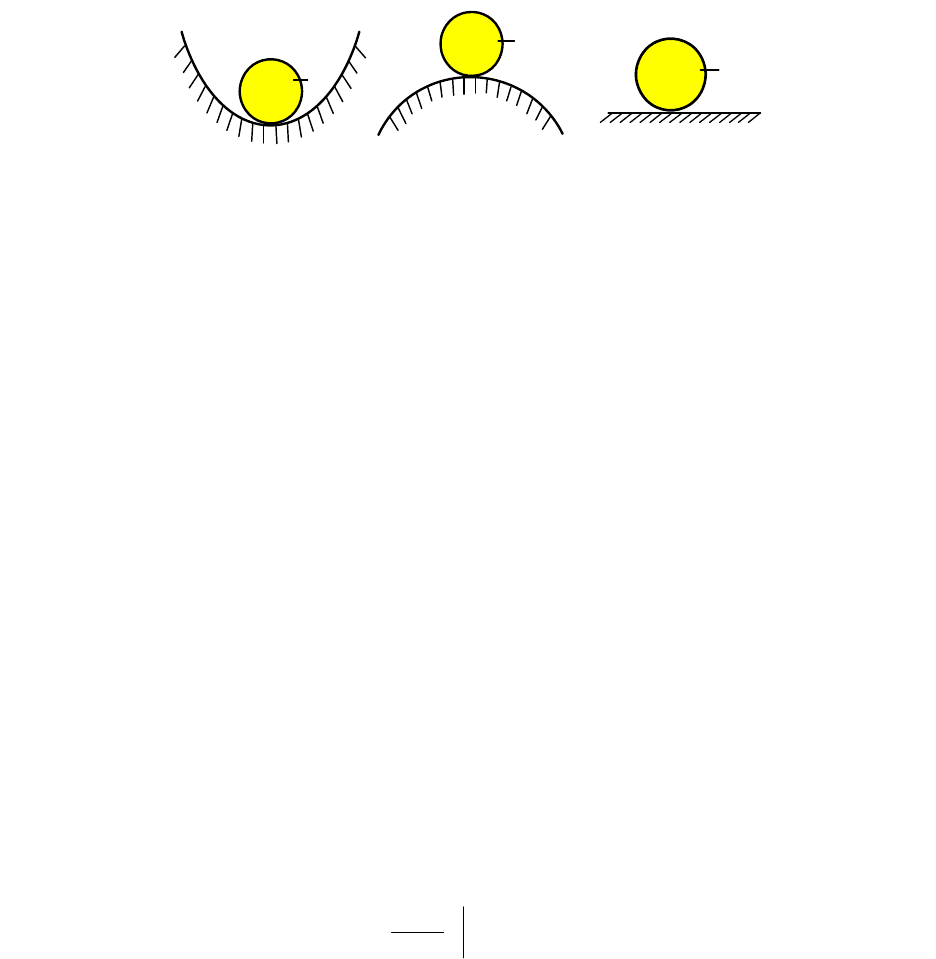
Существенным признаком устойчивости равновесия является то, что при
уменьшении до нуля начальных отклонений системы и их начальных скоростей
в последующем движении отклонения и скорости точек системы также
уменьшаются, стремясь к нулю. Например, устойчивым будет положение
равновесия тяжелого цилиндра
А в цилиндрической впадине (рис. 22.2, а)
При неустойчивом положении равновесия система при дальнейшем
движении все больше отклоняется от него. Такое положение равновесия имеет
тяжелый цилиндр
В на рис. 22.2, б.
Если система при малых отклонениях остается в равновесии и в этом
отклоненном положении, то такое равновесие называется безразличным.
Примером безразличного равновесия является равновесие тяжелого цилиндра
на горизонтальной плоскости (рис. 22.2,
в).
Достаточные условия устойчивости положения равновесия для
консервативной системы устанавливает
теорема Лагранжа–Дирихле: если в
положении изолированного равновесия консервативной системы с
идеальными стационарными связями потенциальная энергия имеет
минимум, то это положение равновесия устойчиво.
По теореме Лагранжа – Дирихле для доказательства устойчивости
равновесия консервативной системы достаточно убедиться в том, что
потенциальная энергия в рассматриваемом положении минимальна. Для
системы с одной степенью свободы минимум определяется просто:
достаточно убедиться, что вторая производная от потенциальной энергии по
обобщенной координате
q, вычисленная в положении равновесия
0
qq
,
положительна, т. е.
o
2
2
П
0
qq
d
dq
.
ЛЕКЦИЯ 23
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
Рассмотрим голономную механическую систему с
S степенями
свободы. Пусть наложенные на систему связи не являются идеальными.
B
A
D
а б в
Рис. 22.2
Получим дифференциальные уравнения движения системы в обобщенных
координатах
q
1
, q
2
, ..., q
S
. Будем исходить из общего уравнения динамики
(21.20)
vvv
v1
δ 0,
n
Fr
rr
r
(23.1)
где
v
F
r
включает как активные силы, так и силы трения, действующие в
системе. Сообщим каждой обобщенной координате положительное
приращение
δ 01, 2,,
m
q m ... S
, тогда возможное перемещение -й точки
вычисляется как сумма частных дифференциалов (22.3):
ν
r
r
= (
ν
r
r
)
1
+(
ν
r
r
)
2
+…+(
ν
r
r
)
S
=
S
m 1
ν
δ
m
m
r
q
q
r
. (23.2)
Подставив (23.2) в (23.1), получим
vv
v1
n
F
rr
S
m 1
ν
0
m
m
r
q
q
r
или
νν
νν
1 ν 1 ν 1
Ф δ 0
Sn n
m
m
mm
rr
Fq
qq
rr
rr
. (23.3)
Согласно (22.4)
ν
ν
ν 1
,
n
m
m
r
QF
q
r
r
(23.4)
аналогично введем обобщенную силу инерции
1
n
u
v
mv
v
m
r
Q
q
r
r
. (23.5)
Тогда с учетом (23.4) и (23.5) уравнение (23.3) примет вид
0
1
s
m
m
u
mm
qQQ δ
. (23.6)
Поскольку
q
1
, q
2
, ..., q
s
– бесконечно малые независимые приращения q
1
,
q
2
, ..., q
S
, то (23.6) выполнимо только тогда, когда все коэффициенты при q
m
равны нулю. Поэтому общее уравнение динамики (23.6) эквивалентно
системе
S уравнений:
0 ( 1, 2, ..., )
u
mm
QQ m s
или
( 1, 2, ..., )
u
mm
QQ m s
. (23.7)
Уравнения (23.7) выражают общее уравнение динамики в обобщенных
координатах
.
Прежде чем найти явный вид системы уравнений (23.7), получим два
вспомогательных равенства. Для первого равенства вычислим скорость
-й
точки как производную от радиус-вектора
12
, , ..., , )
vv s
rr(q q qt
rr
по
времени:
12
1
, ,... ,
.
S
vS
vv
vm
m
m
dr q q q t
rr
V q
dt q t
r
rr
r
&
(23.8)
Считая
m
q
независимыми переменными и продифференцировав по ним
Равенство (23.8), находим первое вспомогательное соотношение
.
vv
mm
Vr
qq
r
r
&
(23.9)
Чтобы получить второе вспомогательное равенство, возьмем частную
производную от левой и правой частей равенства (23.8) по
q
j
:
22
S
vv v
m
m1
jmj j
Vrr
q
qqqtq
r
rr
&
(23.10)
Заметим, что частная производная от радиус-вектора по
q
j
также является
функцией от обобщенных координат
q
1
, q
2
, ..., q
S
и времени t.
Рассмотрим теперь полную производную по времени от частной
производной
j
v
q
r
:
22
1
.
s
vvv
m
m
jmj j
dr r r
q
dt q q q t q
rrr
&
(23.11)
Сравнив первые части формул (23.10) и (23.11), видим, что они одинаковы.
Следовательно, одинаковы и левые части этих формул, т.е.
( 1, 2, ..., ).
vv
jj
Vdr
j
s
qdtq
r
r
(23.12)
Формула (23.12) является вторым искомым вспомогательным соотношением.
Рассмотрим теперь левую часть уравнения (23.7):
11 1
nn n
u
vvvv
mv vv v
vv v
mm m
rrdVr
Qmam
qqdtq
r
rr r
r
r
1
.
n
vv
vv vv
v
mm
dr dr
mV mV
dt q dt q
rr
rr
Воспользовавшись вспомогательными соотношениями (23.9) и (23.12),
получим
2
2
11
()
2
.
2
vv
nn
u
vv vv
mvvvv
vv
mm mm
mV
dV Vd mV
QmVmV
dt q q dt q q
rr
rr
&&
Поменяв порядок суммирования и вычисления производных, находим
22
11
22
nn
u
vv vv
m
vv
mm
dmV mV
Q
dt q q
&
,
или, обозначив
2
1
2
n
vv
v
mV
через кинетическую энергию системы T, получим
.
u
m
mm
dT T
Q
dt q q
&
(23.13)
С учетом (23.13) система уравнений (23.7) принимает вид
m
mm
dT T
Q
dt q q
&
(m = 1, 2, …, s). (23.14)
Уравнения (23.14) называются уравнениями Лагранжа второго рода.
Уравнения Лагранжа (23.14) содержат
S + 1 функций, которыми
являются кинетическая энергия T системы и обобщенные силы Q
1
, Q
2
, ..., Q
s
.
Чтобы воспользоваться уравнениями Лагранжа (23.14), следует выразить эти
функции через обобщенные координаты
q
1
, q
2
, ... , q
S
и обобщенные скорости
12
, , ...,
s
qq q
&& &
.
Основные преимущества уравнений Лагранжа второго рода:
1) по форме уравнения (23.14) записывают одинаково в любой системе
координат, и различие в выборе координат сказывается лишь на виде
S + 1
функций, входящих в эти уравнения. Следовательно, уравнения Лагранжа
второго рода ковариантные относительно любого точечного преобразования
координат;
2) число уравнений (23.14) не зависит от количества материальных то-
чек, входящих в систему, и от характера их движения, а определяется только
числом
S ее степеней свободы;
3) для материальной системы с идеальными связями (20.11) правые
части уравнений Лагранжа (23.14) содержат только обобщенные активные
силы, тем самым из рассмотрения исключаются реакции связей, которые, как
правило, неизвестны.
В математическом отношении уравнения (23.14) представляют собой
систему
S дифференциальных уравнений второго порядка. Нетрудно
показать, что эта система может быть представлена в форме Коши, т. е.
разрешена относительно старших производных. Для таких систем имеет
место теорема о существовании и единственности решения. Из нее следует
детерминированность движения материальной системы, как только заданы
начальные условия движения, т. е. в начальный момент зафиксированы
значения обобщенных координат и обобщенных скоростей:
00 0
112 2
00 0
112 2
0,
(0) , (0) , ..., (0) ,
(0) , (0) , ..., (0) .
s
s
s
s
t
qqqq qq
qqqq qq
&&&& &&
(23.15)
Решение основной задачи динамики заключается в интегрировании
системы уравнений Лагранжа (23.14), т. е. в нахождении обобщенных
координат
q
1
, q
2
, ..., q
S
как функций времени t:
11 12 2
22 12 2
12 2
, , , ..., , ,
, , , ..., , ,
. . . . . . . . . . . . . . . . . . . . .
, , , ..., , .
s
s
ss s
qqtcc c
qqtcc c
qqtcc c
(23.16)