Удут Л.С., Кояин Н.В., Мальцева О.П. Проектирование и исследование автоматизированных электроприводов. Часть 6 Механическая система электропривода
Подождите немного. Документ загружается.


Двухдвигательный электропривод с индивидуальными
преобразователями
Если механические связи между отдельными валопроводами в
многодвигательном электроприводе неизбежны, то электрические связи,
которые, как следует из рассмотренного выше, существенно влияют на
демпфирование механических колебаний приводом и ограничение
динамических нагрузок, крайне нежелательны. Наиболее
благоприятными динамическими качествами обладает
многодвигательный электропривод с электрически не связанными
валопроводами. Многодвигательный электропривод с индивидуальными
преобразователями обеспечивает индивидуальные контуры
демпфирования механических колебаний для каждого валопровода,
индивидуальное ограничение нагрузок приводов, а выравнивание
нагрузок двигателей не вызывает затруднений.
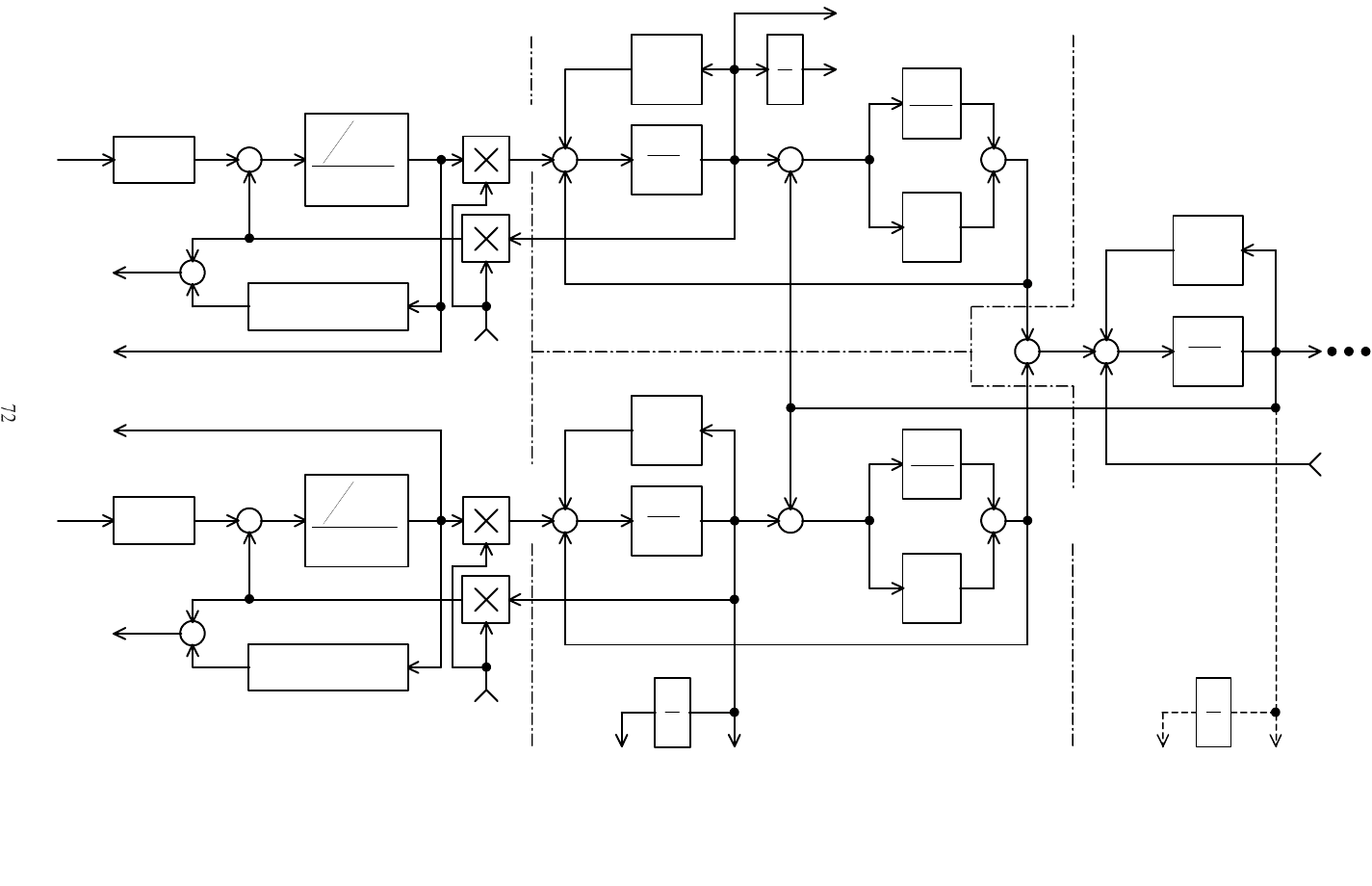
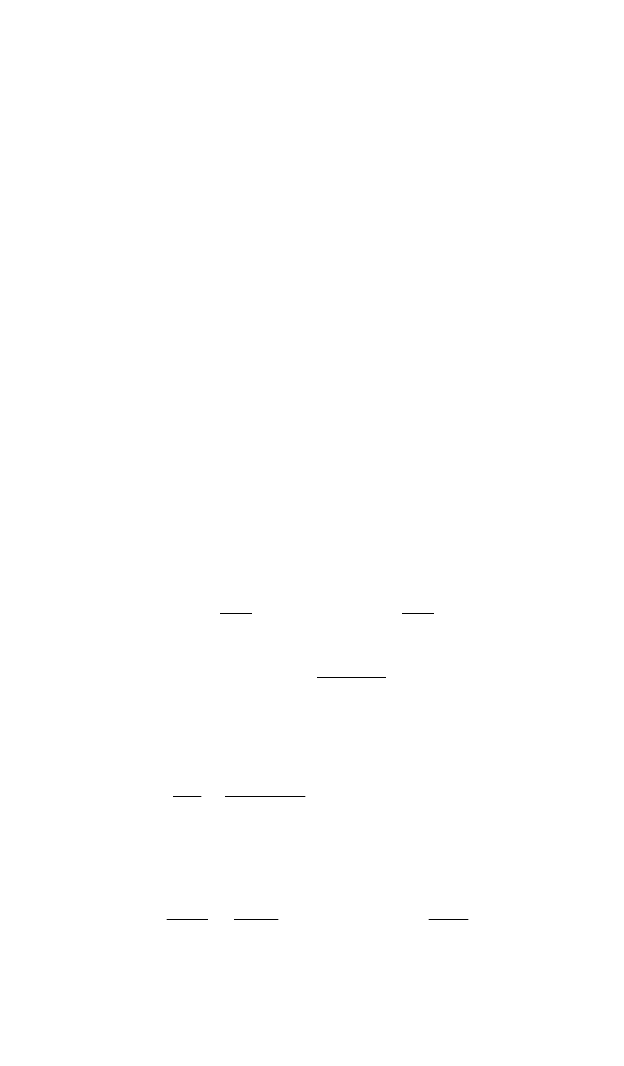
Структурная схема силовой части двухдвигательного
электропривода с индивидуальными преобразователями и упругим
соединением с механизмом (рис. 3.8, б) приведена на рис. 3.12. В
механической части электропривода двигатели взаимосвязаны через
механизм.
При питании электродвигателей от индивидуальных
преобразователей приведение многодвигательного электропривода к
эквивалентному однодвигательному в общем случае невозможно. Если
принять, что электрические и механические системы электроприводов
отдельных валопроводов идентичны, то при одинаковых начальных
условиях электропривод может быть заменен однодвигательным с
эквивалентными параметрами электрической системы:
2
яц1
эяц
R
R
;
2
яц1
эяц
L
L
;
дв1эдв
ФФ kk
;
дв1эдв
JJ 2
(3.6)
и механической системы согласно выражению (3.3).
Схемы индивидуального питания в случае применения
тиристорных преобразователей позволяют уменьшить мощности
отдельных преобразователей, что приводит к упрощению схем силовой
цепи преобразователей и унификации систем электропривода
отдельных механизмов производственного агрегата. В системе Г–Д
использование схемы индивидуального питания двигателей является
громоздким решением. В этом случае целесообразно использовать
схему группового питания параллельно включенных пар двигателей,
73
уменьшая тем самым число параллельно и последовательно
включенных двигателей.
74
U
уп1
e
п1
i
я1
U
дв1
i
я1
e
дв1
(-)
1
1
J p
M
c1
(-)
1
1
3
J
p
M
c3
(-)
3
(-) (-)
(-)
M
13
M
34
W p
п1
( )
M
1
U
уп2
e
п2
i
я2
U
дв2
e
дв2
(-)
1
2
J p
M
c2
(-)
2
(-)
(-)
M
23
W p
п2
( )
M
2
i
я2
1
2
ЭС МС
3
)(f
11
p
1
1
1
13в
b
p
с
13
p
1
2
2
)(
f
22
23в
b
p
с
23
)(f
33
p
1
3
3
1
1
1яц
1яц
pT
R
1
1
2яц
2яц
pT
R
)1(
1двдв1
pТR
)1(
2двдв2
pТR
дв1
)Ф(k
дв2
)Ф(k
Рис. 3.12. Структурная схема силовой части двухдвигательного электропривода с индивидуальными преобразователями
76
Многодвигательный электропривод непрерывно-поточных агрегатов
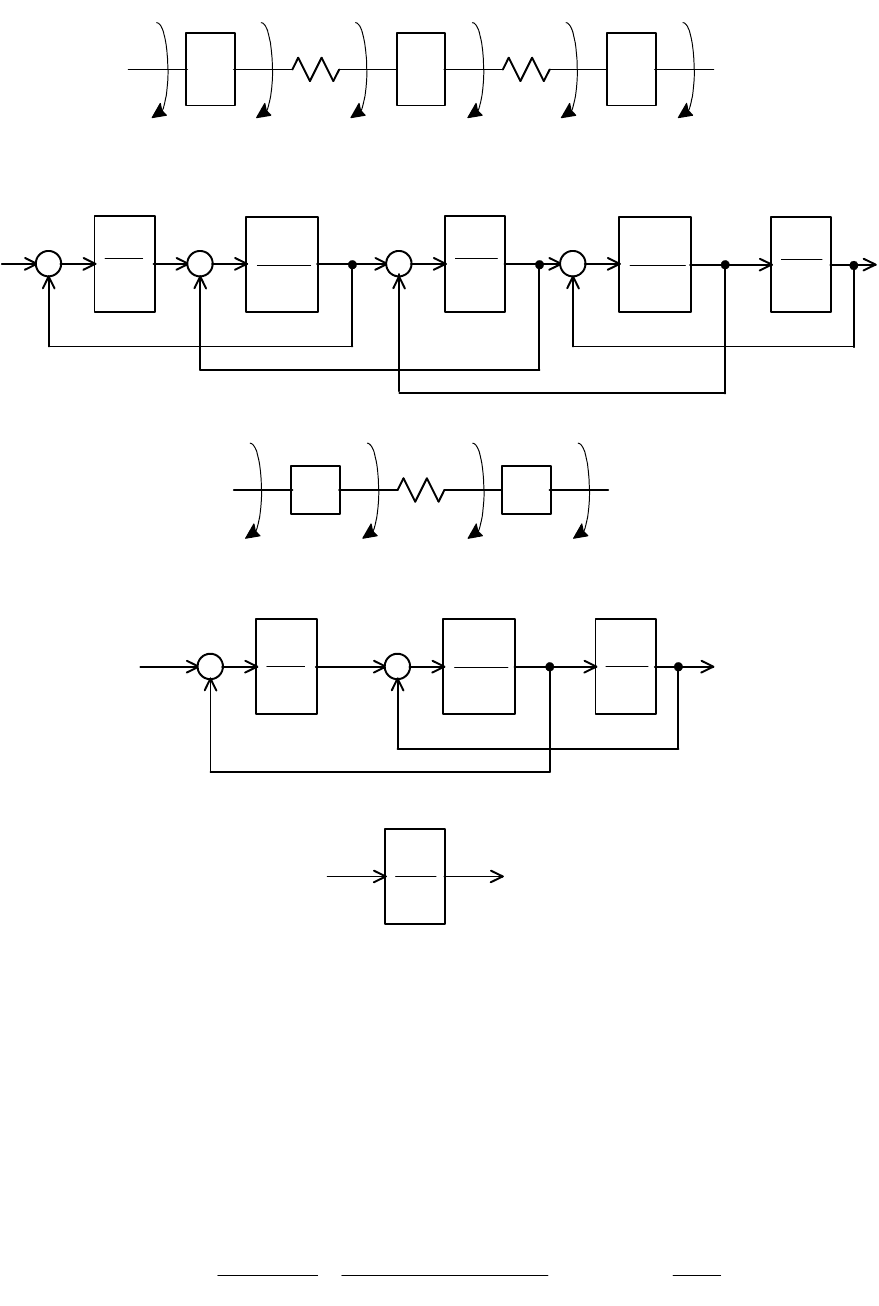
Секции непрерывно-поточных агрегатов (рис. 3.8, г) связаны
через вырабатываемый материал (металлическая полоса, пленка, ткань,
бумажное полотно и т.д.), для которого характерно наличие
упругопластических свойств [14]. Натяжение материала между
секциями (валами) (рис. 3.13, а) определяется суммарным
относительным удлинением, Н,
11
iiii
EsF
,
где
1121
iiii
;
12
– предварительное относительное удлинение материала перед
входной секцией;
1
1
1
ii
ii
ii
L
L
– дополнительное относительное удлинение
материала между рассматриваемыми секциями за счет разности
линейных скоростей валов
i
V
и
1i
V
;
V
L
VV
V
L
V
V
L
VL
ii
ii
ii
i
ii
iii
1
1
11
11
,
тогда
V
VV
ii
ii
1
1
;
1ii
L
– длина свободного участка, м;
V
– скорость движения материала, м/с;
s
– площадь поперечного сечения материала,
2
м
;
E
– модуль упругости,
2
мН
.
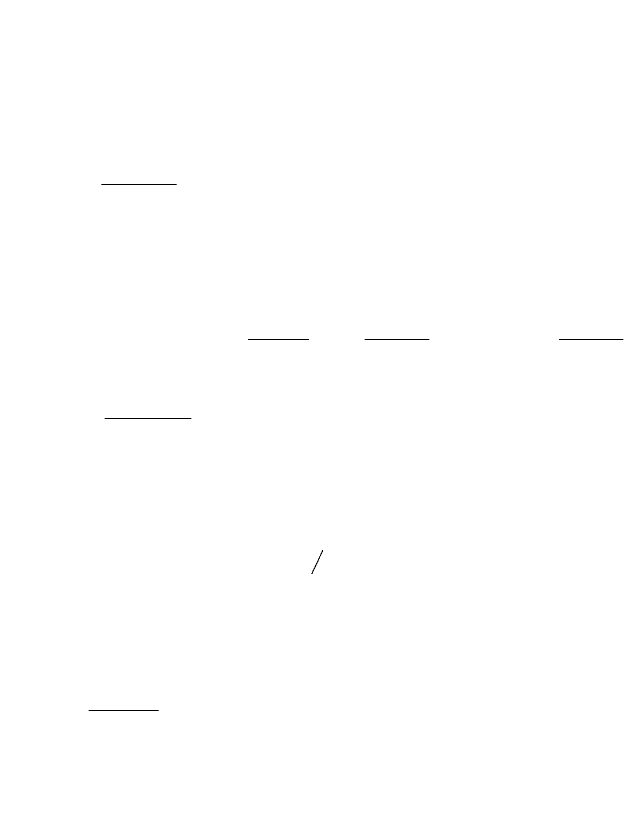
На рис. 3.13, б приведена структурная схема механической системы
электропривода секции поточной линии, где приняты следующие
обозначения:
V
L
T
ii
ii
1
1
– постоянная времени удлинения материала между
рассматриваемыми секциями, с;
i
R
– радиус вала секции, м;
Esk
.
77
i
V
V
)1i
(
V
)1i(i
L
)1i
(
с
М
с
М
i
)1i
(
)1i(
М
i
М
i)1i(
М
а
i
i
с
i
M
i
R
k
V
1
(+)
(-)
(-)
(-)
)1i(
V
i
R
i
V
i
V
1
(-)
(+)
k
i
R
(+)
V
1
(+)
(-)
k
(+)
(-)
(-)
б
ii
F
)1( ii )1(
)1)(2(
ii
i
i
я
i
M
c ii
M
)1(
)1( ii
M
)1( ii
F
1
1
)1(
pT
ii
pJ
i
1
1
1
)1(
pT
ii
)1(я i
i
)1( i
c
)1(c i
M
)1( ii
M
)2)(1( ii
M
)1( i
R
)1( i
R
)1(
ii
)1( i
R
pJ
i )1(
1
)1(
i )1( i
V
)2)(1( ii
F
)2)(1(
ii )2( i
V
1
1
)2)(1(
pT
ii
Рис. 3.13. Многодвигательный электропривод непрерывно-поточного агрегата:
а – кинематическая схема; б – структурная схема механической системы
электропривода двух секций
4. ПРИМЕРЫ РАСЧЕТОВ ПАРАМЕТРОВ МЕХАНИЧЕСКОЙ
СИСТЕМЫ ЭЛЕКТРОПРИВОДА
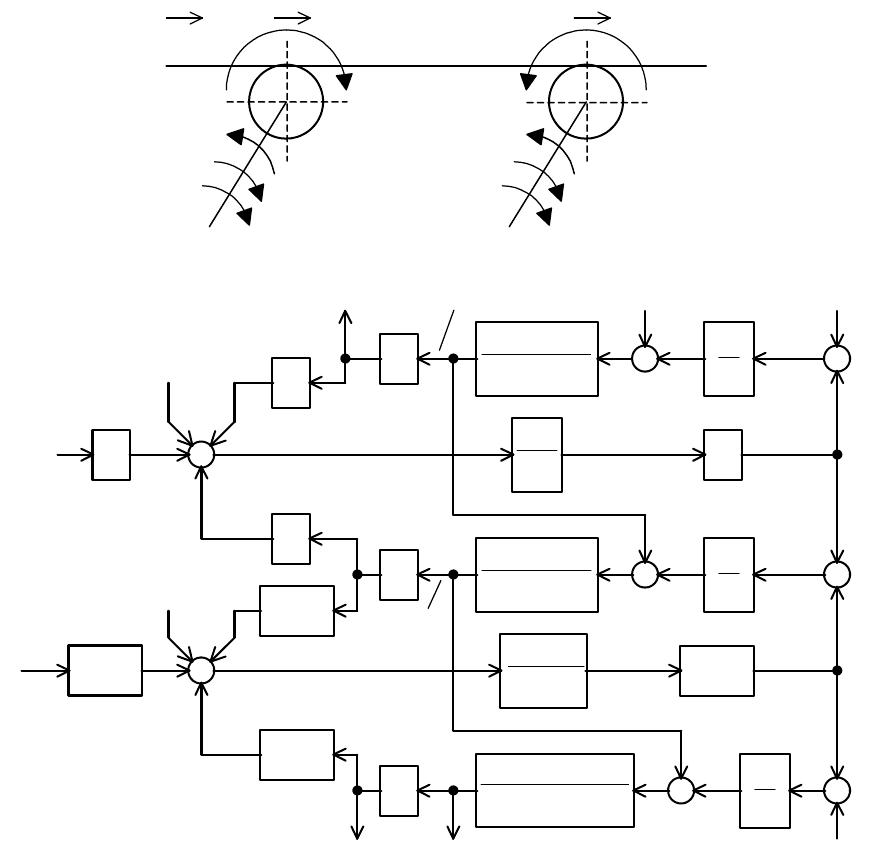
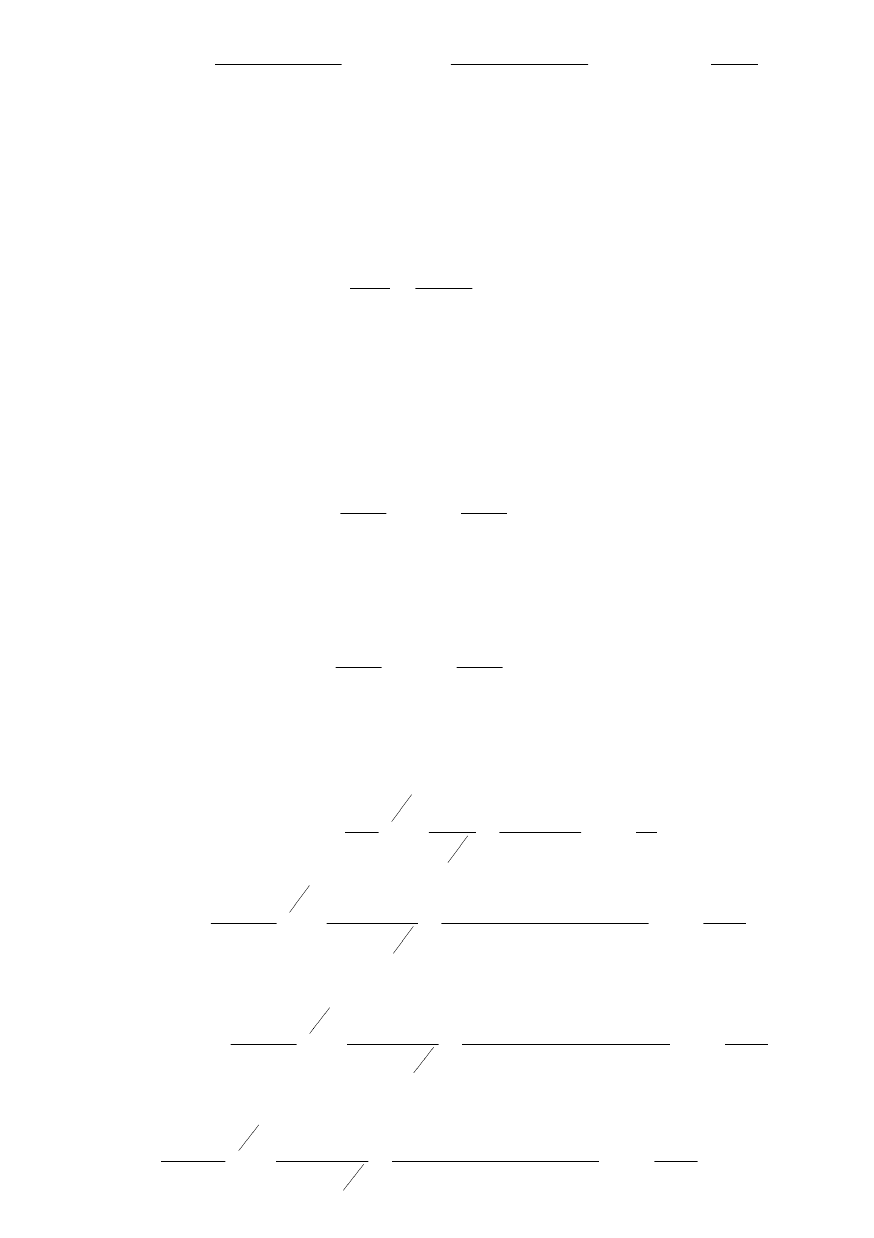
Пример 4.1. Привод механизма продольного перемещения
суппорта токарно-винторезного станка модели 16К20Ф3
Привод подачи выполнен на базе шариковой винтовой передачи,
приводящейся во вращение высокомоментным электродвигателем
постоянного тока через шестеренчатую передачу с передаточным
числом i = 1. Упрощенная кинематическая схема привода подачи
приведена на рис. 4.1.
78
m
х
х
D C
A
B
V
350
100 1410
1
80
M
60 1650
2
1
6
6
2
3
5
4
7 7
6
6
а
350 80
D
F
F
C
F
F
60 1650
A
F
B
F
б
6
в
А
В
D
C
Рис. 4.1. Привод подачи суппорта токарного станка: а – кинематическая
схема: 1 – электродвигатель; 2 – шестеренчатая передача; 3 – ходовой винт; 4 – гайка;
5 – суппорт; 6 – шарикоподшипник радиальный; 7 – пара упорных роликоподшипников;
б, в – схемы для определения реакции опор
Параметры электродвигателя ПБВ112LУ3: номинальный момент
мН21
н
М
; момент инерции
2
дв
мкг049.0 J
; диаметр выходного вала
d = 0.032 м.
Параметры ведущей шестерни: средний диаметр
ср
d
= 0.07 м;
ширина колеса b = 0.02 м; шпоночное соединение с валом: посадочный
диаметр d = 0.032 м; длина шпонки l = 0.02 м; высота шпонки h = 0.004
м; число шпонок z = 1.
Параметры ведомой шестерни: средний диаметр
ср
d
= 0.07 м;
ширина колеса b = 0.02 м; горячая посадка без шпонки.
Параметры винта: средний диаметр
в
d
= 0.05 м; шаг
в
t
= 0.01 м;
длина
78.1
в
l
м.
Параметры соединения винт – гайка: диаметр шариков
т
d
= 0.006 м;
число рабочих шариков в полугайке z = 66; площадь контакта корпуса
гайки с суппортом S = 0.02
2
м
; масса суппорта с кареткой
250m
кг.
Параметры подшипников опор А, С, D: внутренний диаметр
d = 0.04 м; внешний диаметр D = 0.08 м; ширина b = 0.018 м;
диаметр шариков
т
d
= 0.0127 м; число шариков z = 9; число рядов i =
1.
Параметры роликовых упорных подшипников: внутренний
диаметр d = 0.05 м.
79
Корпуса упорных подшипников через переходные детали А и В
(назовем их так для упрощения) соединены с основанием станка.
Площадь сечения стыка деталей А и B S = 0.0162
2
м
, стык нагружен
центральной силой, равной тяговому усилию ходового винта. Площадь
сечения стыка детали В и станины S = 0.073
2
м
, стык нагружен
касательным усилием и работает на сдвиг.
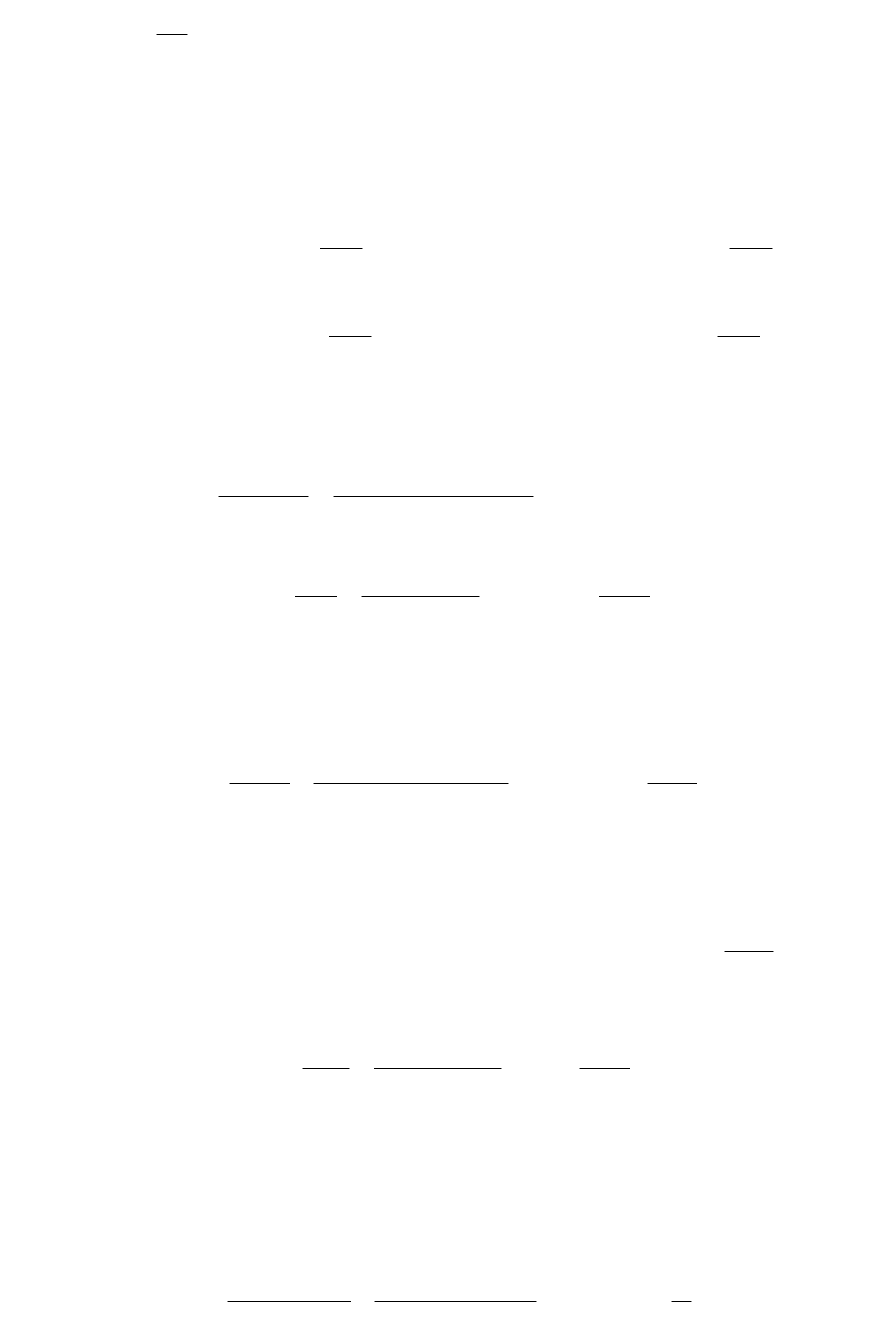
Расчет приведенных моментов инерции
Пренебрегая массой шестерен, кинематическую схему представим
в виде трех движущихся масс: массы якоря двигателя, вращающейся с
угловой скоростью
1
; массы винта, вращающейся с угловой
скоростью
12
; массы поступательных движущихся частей m. После
приведения движущихся масс к скорости вала двигателя
1
получим
трехмассовую расчетную схему (рис. 4.2, б).
Момент инерции якоря двигателя задан, тогда
2
дв
'
1
мкг049.0 JJ
.
Момент инерции ходового винта как сплошного стального
цилиндра (табл. 1.2)
.мкг00852.0
2
025.0
78.1025.0108.7
22
2
2
23
2
в
в
2
в
2
в
в
R
lR
R
mJ
Момент инерции ходового винта, приведенный к валу двигателя
2
22
в
'
2
мкг00852.0
1
00852.0
i
J
J
.
Радиус приведения узла винт – гайка
рад
м
00159155.0
2
01.0
2
в
t
.
Момент инерции поступательно движущихся частей,
приведенный к валу двигателя
222'
3
мкг000633.000159155.0250 mJ
.
80
pJ
1
'
1
pJ
1
'
2
pJ
1
'
3
p
c
'
12
p
c
'
23
1
б
'
12у
M
2
'
23у
M
3
(-)(-)(-)(-)
М
pJ
1
1
pJ
1
2
p
c
12
(-) (-)
1
12у
M
2
М
г
pJ
1
э
1
М
д
'
1
J
'
2
J
'
3
J
'
12
с
'
23
с
'
23
'
12
'
12у
M
'
23у
M
1
2
3
М
а
1
J
2
J
1
2
М
12у
M
12
12
с
в
Рис. 4.2. Расчетные и структурные схемы привода подачи
Расчет кинематической цепи между двигателем и ходовым винтом
Крутящий момент примем равным номинальному моменту
двигателя
мН21
н
ММ
.
Крутильной деформацией вала двигателя пренебрегаем.
Крутильную податливость соединения ведущей шестерни с валом
двигателя определяем по выражению (1.30)
мН
рад
1081.7
1004.002.0032.0
104.6
5
2
12
2
ш
11
zhld
k
.
81
Крутильная податливость зубцов зубчатой передачи определяется
по выражению (1.41)
1cos;5.0
ср
dR
мН
рад
1045.2
1035.002.0
1
106
cos
1
6
2
11
22
з21
Rb
k
.
Крутильной податливостью соединения ведомой шестерни с
ходовым винтом пренебрегаем.
Крутильная податливость зубчатой передачи от деформации
подшипников определяется в соответствии с подразделом 1.8.
Окружные усилия на шестернях (рис. 1.11)
Н600
035.0
21
ш
н
R
M
F
.
Схемы для определения реакции опор
A
F
,
B
F
и
C
F
,
D
F
приведены соответственно на рис. 4.1, б и в. Из уравнения моментов
относительно точки А для схемы рис. 4.1, б
65.106.0
B
FF
находим
Н82.21
65.1
06.0
600
65.1
06.0
FF
B
,
тогда
Н82.62182.21600
BA
FFF
.
Аналогично
Н14.137
35.0
08.0
600
35.0
08.0
FF
D
,
тогда
Н14.73714.137600
DC
FFF
.
Радиальные деформации радиальных шариковых подшипников
опор определяются по выражениям (1.34), (1.36) и (1.38):
м;10155.1110)062.2093.9(
08.0
04.0
1
018.004.0
1025.182.6214
0127.0
10
91
82.621
126.01
1
4
10
126.0
66
12
3
1
6
3
2
3
1
6
3
2
D
d
bd
kF
a
zi
F
l
A
т
A
A
м;1063.1210)444.2185.10(
08.0
04.0
1
018.004.0
1025.114.7374
0127.0
10
91
14.737
126.01
66
12
3
1
6
3
2
С
l
м,10775.310)455.032.3(
08.0
04.0
1
018.004.0
1025.114.1374
0127.0
10
91
14.137
126.01
66
12
3
1
6
3
2
D
l
где
1
для радиальных подшипников, не имеющих предварительного натяга;
82
Н
м
1025.1
3
12
k
. Податливостью опоры В ввиду малости реакции
B
F
пренебрегаем.
Ввиду короткой длины концов вала двигателя и ходового винта
пренебрегаем консольным прогибом валов. Тогда результирующие
смещения ведущей
1
l
и ведомой
2
l
шестерни определяются по
выражению (1.46)
м,1038.16
35.0
08.0
10)775.363.12(1063.12
35.0
08.0
6
66
1
DCC
llll
.м1056.11
65.1
06.0
10)0155.11(10155.11
65.1
06.0
6
66
2
ВАА
llll
Угол закручивания ведущего вала, обусловленный радиальной
деформацией подшипников, определяется по выражению (1.47)
.рад10983.7
035.0
1056.1138.16
4
6
1
21
1
R
ll
Крутильная податливость от деформации подшипников согласно (3.43)
.
мН
рад
108.3
21
10983.7
5
4
1
31
М
Угловая податливость винта определяется по выражению (1.17).
Определять будем в среднем положении гайки, когда результирующая
податливость винта с двумя закрепленными концами (подраздел 1.6)
имеет наибольшее значение
.
мН
рад
10709.1
05.01.0101.8
865.0
5
410
р
ср1
2
JG
x
Результирующая податливость элементов кинематической цепи
между двигателем и винтом
.
мН
рад
103613.110709.1108.31045.21081.7
45565
2312111
'
12
Результирующая крутильная жесткость кинематической цепи
между двигателем и винтом
.
рад
мН
7346
103613.1
11
4'
12
'
12
с
Расчет жесткости кинематической цепи винт – суппорт
Контактная линейная податливость узла винт – гайка
определяется по выражению (3.30)
.
Н
м
10263.1
1066006.02
10
102
10
9
3
6
3
т
6
3
zd
l
83