Удут Л.С., Кояин Н.В., Мальцева О.П. Проектирование и исследование автоматизированных электроприводов. Часть 6 Механическая система электропривода
Подождите немного. Документ загружается.

обозначение выражения Вариант 1 Вариант 2
Подъемное усилие на блоке ковша при удержании
груженого ковша в верхнем положении, кН
вп2
р2рк2кп
п3
sin
coscos)(
l
lGlGG
F
480 488
3. Период возвращения порожнего ковша в забой
Удержание порожнего ковша в верхнем положении (рис. 4.10, б)
Подъемное усилие на блоке ковша при удержании
порожнего ковша, кН
вп2
р2рк2к
п4
sin
coscos
l
lGlG
F
256 242
Длина подъемного каната от блока ковша до головного
блока стрелы в ее верхнем положении, м
в
пн
гб
ств
sin
)sin(
)
sin2
Д
(
HH
Ll
4.34 5.15
Порожний ковш в нижнем положении
Угол подъемного каната относительно рукояти, град
кстп
п1
н
sin
arctg
HLH
l
25.36 28.85
Длина подъемного каната
от блока ковша до
головного блока стрелы в ее
нижнем положении, м
н
п1
н
sin
l
l
11.67 14.8
Изменение длины каната в
процессе копания от блока
ковша до головного блока
стрелы, м
вн
lll
7.3 9.6
Примечание: Ориентировочно изменение длины каната
на участке от блока ковша до головного блока стрелы
можно принять равным
ч.макс
)7.06.0( Hl
Усилие на блоке ковша в
момент окончания спуска, кН
п4
F
0 0
Подъемное усилие на блоке ковша в момент начала
копания, кН
нкн
нкоп
0
sin
)H(H
HF
F
п
.
Если усилие копания принять постоянным по всей
высоте забоя, то
п0
F
равно, кН
582 571
104
'
р
G
п1
l
р1
l
к1
l
11
l
п1
F
коп
F
пк
GG
п
H
н
H
гб
Д
п
H
макс
H
а
б
р2
l
п2
l
р
G
пк
GG
ст
L
в
п3
F
в
l
к2
l
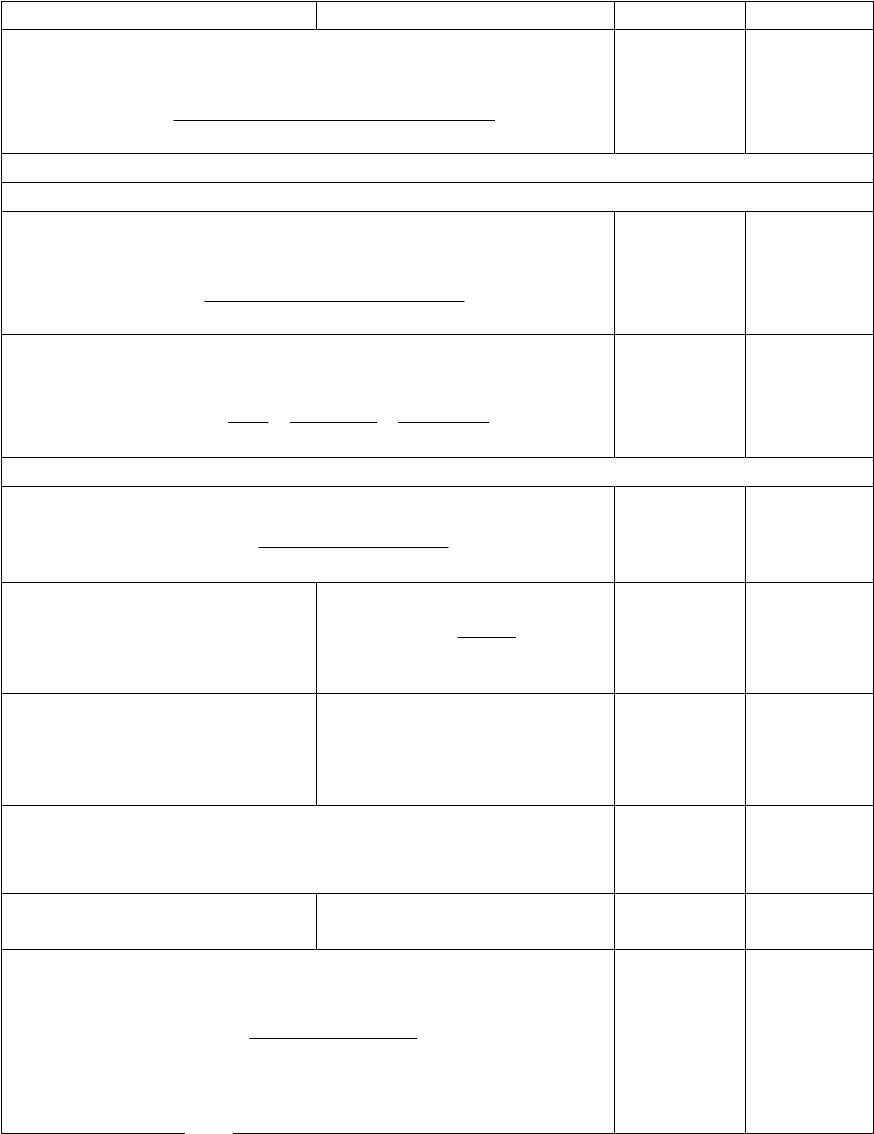
Рис. 4.10. Схема расположения ковша и
рукояти механической лопаты для
определения усилий: а – период копания; б –
период поворота груженого и порожнего (
0
п
G
) ковша; в – ковш в нижней точке
забоя
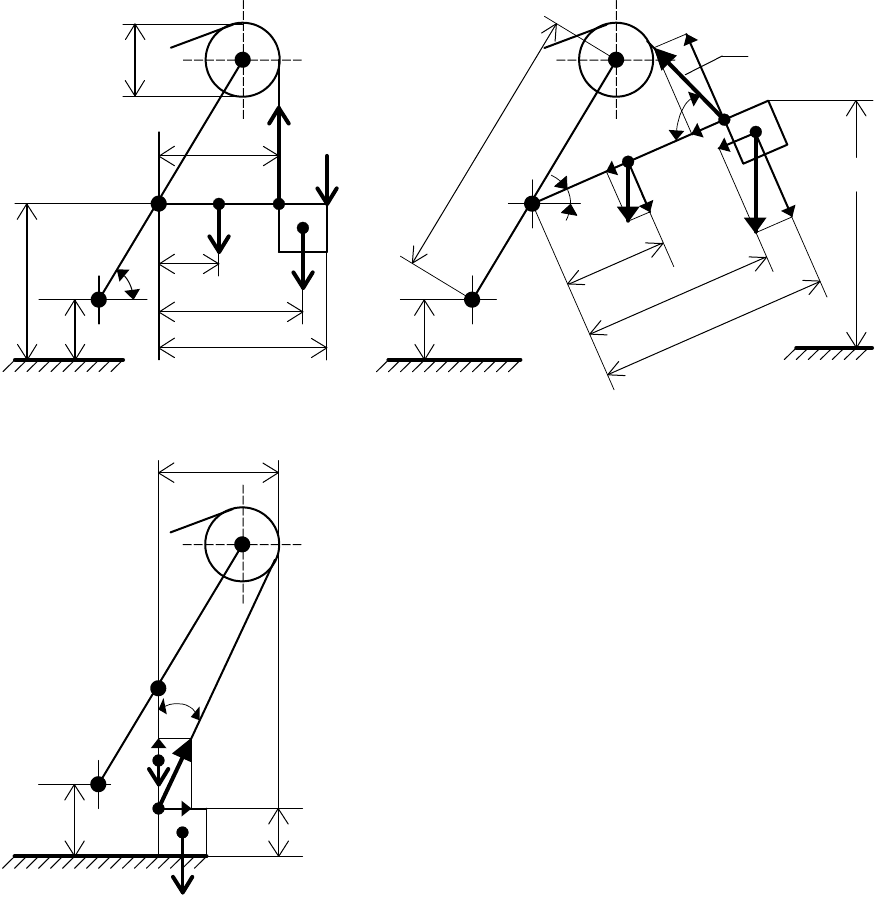
Расчетная схема механической системы привода подъема
В кинематической цепи механизма подъема тяговые канаты
являются элементами с наименьшей жесткостью, поэтому жесткость
канатов должна быть учтена в первую очередь и тогда механическая
система привода подъема (рис. 4.11, а и б) представляется как
двухмассовая (рис. 4.11, в).
При этом не учитываются эластичные или упруго-
предохранительные муфты, устанавливаемые в отдельных механизмах
между двигателями и редуктором, и редуктором и барабанами. Обе эти
параллельные ветви двигатель–редуктор и редуктор–барабан считаются
одинаковыми и заменяются эквивалентной схемой.
р
G
п1
l
н
l
п0
F
п
H
к
L
в
к
G
н
105
дв.э
J
ред
ред
,
i
дв
дв.э
M
б
бэ
J
4
G
4
G
4
G
gmG
m
21
l
21
l
2
V
2
V
22
l
а
б
2
m
дв.э
J
дв.э
M
дв
ред
ред
,
i
б
бэ
J
gmG
2
G
2
G
1
l
1
l
к
V
1
к
V
1
J
2
J
с1
М
с.нагр
М
2
1
дв.э
М
э
с
в
Рис. 4.11. Механическая система привода подъема экскаватора: а – со
сдвоенным канатом; б – со сдвоенным полиспастом; в – расчетная схема;
1 – блок ковша; 2 – выравнивающий полублок
Определение приведенных моментов инерции элементов
кинематической цепи привода
Эквивалентный момент инерции приводных двигателей
.мкг341722
2
двдв.э
1,2
JJ
Приведенный эквивалентный момент инерции вращающихся
элементов механизма подъема (муфт, шестерен, барабанов) может быть
найден по упрощенному выражению [11]
.мкг95.534175.0)2.015.0(
2
дв.э
2,1
мех
JJ
Приведенный момент инерции порожнего ковша
;мкг63.2
192.534
4.1
106.15
4
Д
2
22
2
3
2
пол
2
ред
2
б
кк1
ii
mJ
.мкг96.2
241.254
4.1
106.15
4
Д
2
22
2
3
2
пол
2
ред
2
б
кк2
ii
mJ
Приведенный момент инерции породы (табл. 4.3)
;мкг0.3
192.534
4.1
108.17
4
Д
2
22
2
3
2
пол
2
ред
2
б
пп1
ii
mJ
106
.мкг93.3
241.254
4.1
107.20
4
Д
2
22
2
3
2
пол
2
ред
2
б
пп2
ii
mJ
Приведенный момент инерции рукояти, выдвинутой на полную
длину (верхнее положение).
;мкг584.0
192.5312
4.1104.10
12
Д
2
22
23
2
пол
2
ред
2
бр
р1
в
ii
m
J
.мкг658.0
241.2512
4.1104.10
12
Д
2
22
23
2
пол
2
ред
2
бр
р2
в
ii
m
J
Приведенный момент инерции рукояти в нижнем положении
ковша
,
48
Д
1212318
2
пол
2
ред
2
р
п0
2
бр
3
р
п0
р
п0
3
р
п0
р
н
ii
L
l
m
L
l
L
l
L
l
J
тогда для первого
варианта при
68.0
74.8
95.5
м,95.585.18.7м,74.8
р
п0
кнп0р
L
l
HHlL
,
2
222
23
33
р1
мкг44.0
192.5368.048
4.1104.10
])168.02()168.02(3)68.01(8[
н
J
и для второго варианта при
56.0
5.11
46.6
м,46.685.131.8м,5.11
р
п0
кнп0р
L
l
HHlL
,
.мкг55.0
241.2556.048
4.1104.10
])156.02()156.02(3)56.01(8[
2
222
23
33
р2
н
J
Для предварительных расчетов можно ограничиться учетом момента
инерции рукояти, выдвинутой на
3
2
длины, которая определяется по
выражению
.
16
Д
2
пол
2
ред
2
бр
р
32
ii
m
J
В рассматриваемом примере
44.0
32
р1
J
, а
2
р2
мкг49.0
32
J
, что
мало отличается от значений
н
р1
J
и
н
р2
J
.
Приведенный момент инерции каната:
;мкг165.0
192.534
4.1
977
4
Д
2
22
2
2
пол
2
ред
2
б
канкан1
ii
mJ
.мкг215.0
241.254
4.1
1134
4
Д
2
22
2
2
пол
2
ред
2
б
канкан2
ii
mJ
Определение эквивалентных моментов инерции двухмассовой
107
расчетной схемы (рис. 4.11, в)
Эквивалентный момент инерции первой массы
.мкг95.3995.534
2
мехдв.э2111
1,21,2
JJJJ
Эквивалентный момент инерции второй массы в нижнем
положении порожнего ковша:
;мкг23.3165.044.063.2
2
кан1р1к112
нн
JJJJ
.мкг73.3215.055.096.2
2
кан2р2к222
нн
JJJJ
Эквивалентный момент инерции второй массы в верхнем
положении загруженного ковша и выдвинутой на полную длину
рукоятью:
;мкг379.6165.0584.00.363.2
2
кан11рп1к112
вв
JJJJJ
.мкг763.7215.0658.093.396.2
2
кан22рп2к222
вв
JJJJJ
Определение приведенной эквивалентной жесткости двухмассовой
расчетной схемы (рис. 4.11, в)
Эквивалентная линейная жесткость канатов для компоновочной
схемы сдвоенный канат (рис. 4.11, а) определяется по выражению
,
м
Н
,2
1к
1э
l
с
с
l
где
Н10275.1
1
1002.11025.1
1
8
311
1кк
1к
SE
с
– жесткость одного
погонного метра каната;
2
11
к
м
Н
10)4.11.1( E
– модуль продольной упругости для канатов;
23
2
32
1к
м1002.1
4
1045.21415.3
216
4
d
nS
– площадь сечения
проволок;
216n
– число проволок;
мм45.2d
– диаметр проволок;
l – длина каната от барабана подъемной лебедки до ролика ковша, м.
Определим ориентировочно следующие параметры подъемных
канатов:
– длина запасовочных концов каната
м8.16842.02.0
1кзап
Ll
;
– длина каната от барабана до блока ковша в его нижнем положении
м6.33)8.1684(5.0)(5.0
зап1кн1
lLl
;
– длина каната от барабана до блока ковша в его верхнем положении
м3.263.76.33
1н1в1
lll
.
108
Для предварительных расчетов изменение длины каната на
участке от блока ковша до головного блока стрелы в процессе работы
можно определить по выражению
.)7.06.0(
макс1
Hl
Эквивалентная линейная жесткость подъемных канатов при
нижнем положении ковша
м
Н
1059.7
6.33
10275.1
22
6
8
н1
1к
1э
н
l
с
с
l
и при верхнем положении ковша
.
м
Н
10696.9
3.26
10275.1
22
6
8
в1
1к
1э
в
l
с
с
l
Приведенная эквивалентная угловая жесткость двухмассовой
расчетной схемы (рис. 4.11, в) при нижнем положении ковша
рад
мН
2.1279
92.534
4.1
1059.7
4
Д
2
2
6
2
ред
2
б
1э1э
нн
i
сс
l
и при верхнем положении ковша
.
рад
мН
1.1634
92.534
4.1
10696.9
4
Д
2
2
6
2
ред
2
б
1э1э
вв
i
сс
l
Эквивалентная линейная жесткость канатов для компоновочной
схемы сдвоенный полиспаст (рис. 4.11, б) определяется по выражению
,
м
Н
,
4
пол
21
2к
э
i
ll
с
с
l
где
Н10016.1
1
10813.01025.1
1
8
311
2кк
2к
SE
с
– жесткость одного
погонного метра каната;
2
11
к
м
Н
10)4.11.1( E
– модуль продольной упругости для канатов;
23
2
3
2
2к
2к
м10813.0
4
105.451415.3
5.0
4
5.0
d
S
– площадь сечения проволок;
мм5.45
2
к
d
– диаметр каната.
Ориентировочно определим следующие параметры канатной
передачи:
– длина каната от барабана до блока ковша в его нижнем положении
м2.38
95.12
72.14
6.33
ч1
ч2
н1н21
H
H
ll
;
– длина каната от блока ковша в его нижнем положении до
выравнивающего полублока
м15.16)2.3828.165.125(5.0)2(5.0
н21зап2кн22
llLl
;
– длина каната от барабана до блока ковша в его верхнем положении
м6.286.92.38
2н21в21
lll
;
109
– длина каната от блока ковша в его верхнем положении до
выравнивающего полублока
м55.66.915.16
2н22в22
lll
.
Эквивалентная линейная жесткость подъемных канатов при
нижнем положении ковша
м
Н
,10955.142
15.162.38
10016.144
6
8
пол
н22н21
2к
э2
н
i
ll
с
с
l
и при верхнем положении ковша
.
м
Н
,10124.232
55.66.28
10016.14
4
6
8
пол
в22в21
2к
э2
в
i
ll
с
с
l
Приведенная эквивалентная угловая жесткость двухмассовой
расчетной схемы (рис. 4.11, в) при нижнем положении ковша
рад
мН
4.11349
41.254
4.1
10955.14
4
Д
2
2
6
2
ред
2
б
2э2э
нн
i
сс
l
и при верхнем положении ковша
.
рад
мН
7.17548
41.254
4.1
10124.23
4
Д
2
2
6
2
ред
2
б
2э2э
вв
i
сс
l
Определение резонансной частоты двухмассовой механической
системы привода подъема
Резонансная частота двухмассовой механической системы
привода подъема, выполненной по схеме сдвоенный канат, при нижнем
положении порожнего ковша
Гц3.3или
с
рад
7.202.1279
23.335.39
23.395.39
12
1э
1211
1211
12
н
н
н
f
с
JJ
JJ
и при верхнем положении наполненного ковша
Гц.7.2или
с
рад
2.171.1634
38.635.39
38.695.39
12
1э
1211
1211
12
в
в
в
f
с
JJ
JJ
Резонансная частота двухмассовой механической системы
привода подъема, выполненной по схеме сдвоенного полиспаста, при
нижнем положении порожнего ковша
Гц18.9или
с
рад
68.574.11349
73.335.39
73.395.39
12
2э
2221
2221
12
н
н
н
f
с
JJ
JJ
110
и при верхнем положении наполненного ковша
Гц.27.8или
с
рад
952.517.17548
763.735.39
763.795.39
12
2э
2221
2221
12
в
в
в
f
с
JJ
JJ
Таким образом, второй вариант выполнения канатного привода
подъема по схеме сдвоенного полиспаста обеспечивает значительно
большую жесткость механической системы и более высокую
резонансную частоту ее собственных колебаний. По этой причине
компоновочная схема сдвоенного полиспаста является более
предпочтительной.
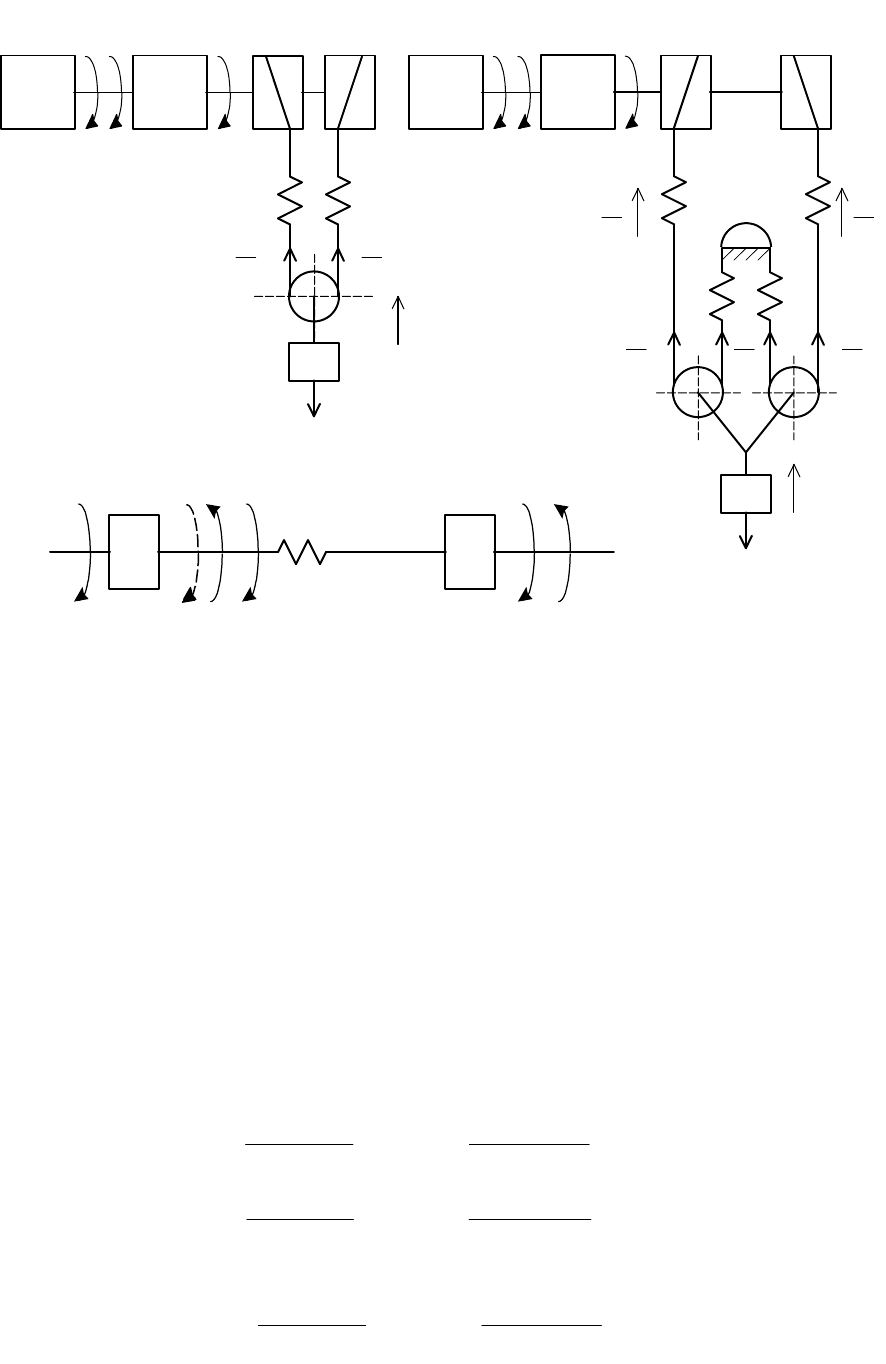
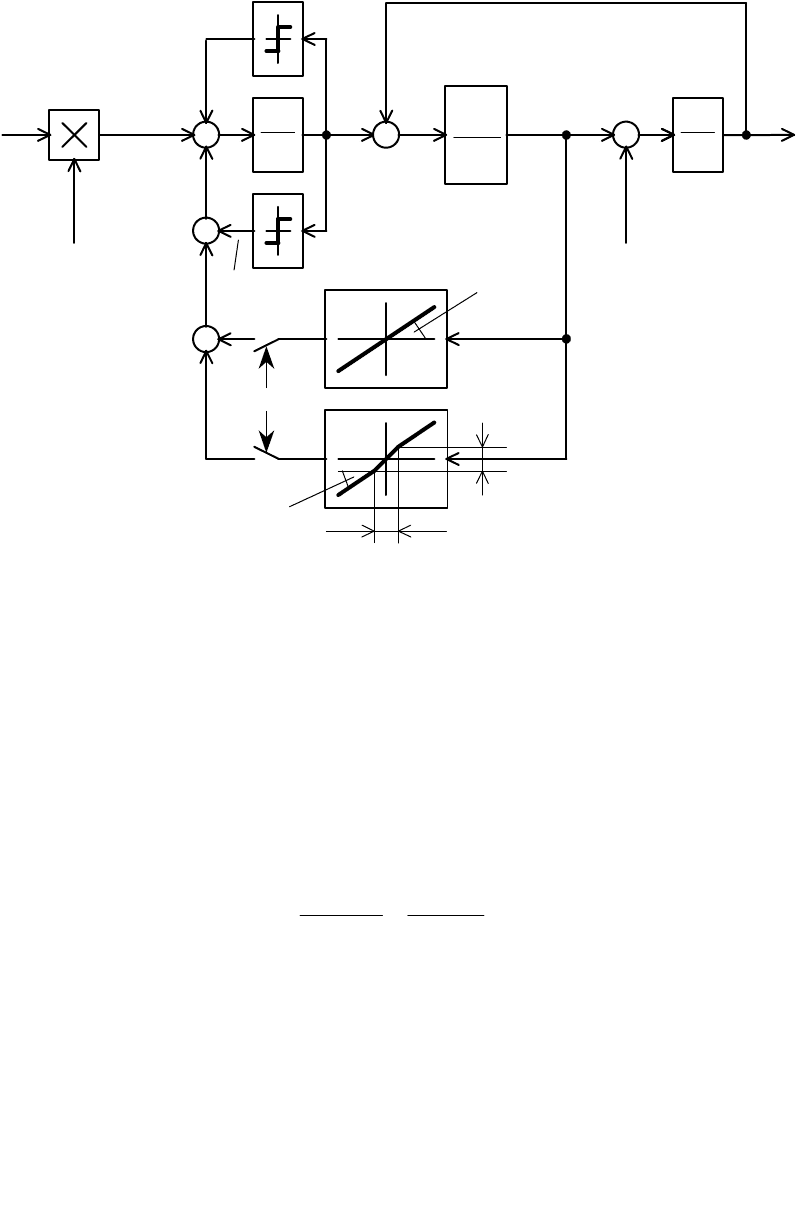
Структурная схема механической системы привода подъема
Структурные схемы двухмассовой механической системы
привода механизма подъема без и с учетом переменных потерь в
передачах приведены соответственно на рис. 4.12, а и б.
2
я
i
(-)
(-)
1с
М
1
(-) (-)
12
М
pJ
1
1
pJ
2
1
p
с
э
дв
Ф2
k
нагр.с
M
эмдв
М
а
111
pJ
1
1
(-)
(-)
пост
М
р
с
12
дв.эм
М
2
p
J
1
2
(-)
1
12
М
(-)
с дв
М
О""
П""
пост.
М
пост.
М
П
О
c нагр
M
б
я
i
дв
Ф2
k
Рис. 4.12. Структурная схема двухмассовой механической системы привода
механизма подъема: а – без учета переменных потерь; б – с учетом переменных
потерь
Момент трения на валу первой массы определяется моментом
трения на валу двигателей
двс
М
и моментом постоянных потерь
механизма
постс
М
.
Примем КПД передачи в прямом и обратном направлении
одинаковыми, а постоянные и переменные потери при номинальной
нагрузке механизма подъема равными. Тогда значение коэффициентов
постоянных и переменных потерь определяется из условия (2.11)
,095.0
84.02
84.01
2
1
мех
мех
ba
где
мех
– КПД подъемного механизма имеет значение
)85.08.0(
[11].
Момент полезной нагрузки
нагр.с
М
приложен к валу второй массы
и его значение определяется усилием на блоке ковша. В процессе
копания машинист перемещением рукояти поддерживает желаемые
значения нагрузки двигателей. Максимальная производительность
достигается при работе привода механизма подъема на механической
характеристике в районе момента отсечки, который для привода подъема
экскаватора лопаты выбирается равным
стопотс
)8.07.0( ММ
.
Расчеты моментов нагрузки на осях масс структурных схем рис. 4.12
для двух вариантов реализации привода подъема приведены в табл. 4.5.
112
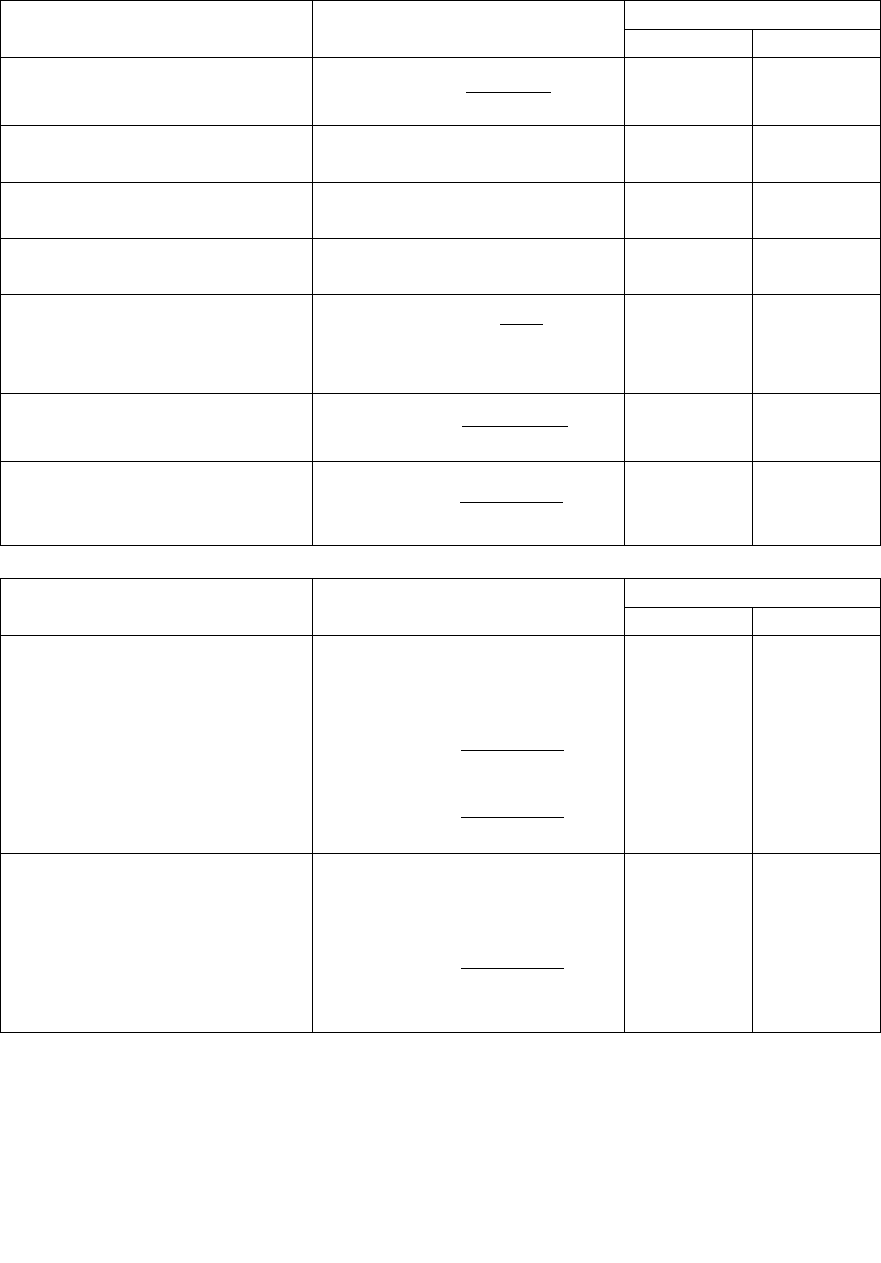
Таблица 4.5
Наименование
параметра
Обозначения,
расчетные выражения
Значение
Вариант 1 Вариант 2
Номинальный момент
двигателя,
мН
н
ндв
ндв
30
n
Р
М
2258.3 2451.9
Момент трения на валу
двигателей,
мН
)(2
ндвндвдвс
МIсМ
223 249
Момент постоянных потерь
механизма подъема,
мН
ндвпостс
2 МаМ
429 465.9
Момент трения на валу
первой массы,
мН
поссдвсс1
МММ
652 714.9
Углы наклона
характеристик нелинейных
звеньев рис. 3.35, б, град
b
1
1
arctg
П
42.4 42.4
b 1arctg
О
47.6 47.6
Максимальный момент на
валу второй массы,
мН
полред
бмаксп
максп
2
Д
ii
F
М
9087.5 10799.0
Момент нагрузки на валу
второй массы в процессе
копания,
мН
полред
б1п
нагрс
2
Д
ii
F
М
8802.0 9683.2
Окончание табл. 4.5
Наименование
параметра
Обозначения,
расчетные выражения
Значение
Вариант 1 Вариант 2
Момент нагрузки при
подъеме груженого ковша,
мН
:
– начальный
полред
бп2
нагрс
2
Д
ii
F
М
5418.8 6219.0
– конечный
полред
бп3
нагрс
2
Д
ii
F
М
6231.4 6721.8
Момент нагрузки при
опускании порожнего ковша,
мН
:
– начальный
полред
бп4
нагрс
2
Д
ii
F
М
3323.4 3333.3
– конечный – 0 0
При проектировании системы управления электроприводом на
начальном этапе может рассматриваться одномассовая механическая
система, тогда ее эквивалентный момент инерции
21
JJJ
э
и эквивалентный момент нагрузки
.sign
.нагрcc1c
МММ
5. МОДЕРНИЗАЦИЯ СОВРЕМЕННЫХ СИСТЕМ
113