Удут Л.С., Кояин Н.В., Мальцева О.П. Проектирование и исследование автоматизированных электроприводов. Часть 6 Механическая система электропривода
Подождите немного. Документ загружается.

нагр.с
М
нагрнагр.с
P,М
const
М
нагр.с
нагр
P
нагр.с
М
нагрнагр.с
P,М
1
М
нагр.с
constP
нагр
нагрнагр.с
P,М
3
нагр
P
2
нагр.с
М
а б в
г д
z
z
0
0
R
А
)(
2
и0
2
R
mJ
z
А – центр тяжести
детали;
и0
– радиус инерции
детали относительно
оси 00;
m – масса детали
Примечание к табл. 1.2: * –
– плотность материала,
3
м
кг
. Для стали
3
3
м
кг
108.7
.
В каталогах на электрические машины могут приводиться
значения махового момента
)мкгс(мкГ,
222
GD
. При принятых
единицах измерения вращающего момента
мН
и угловой скорости
вращения
с
рад
связь между маховым моментом и моментом инерции
определяется соотношением
2
2
мкг,
4
GD
J
. (1.7)
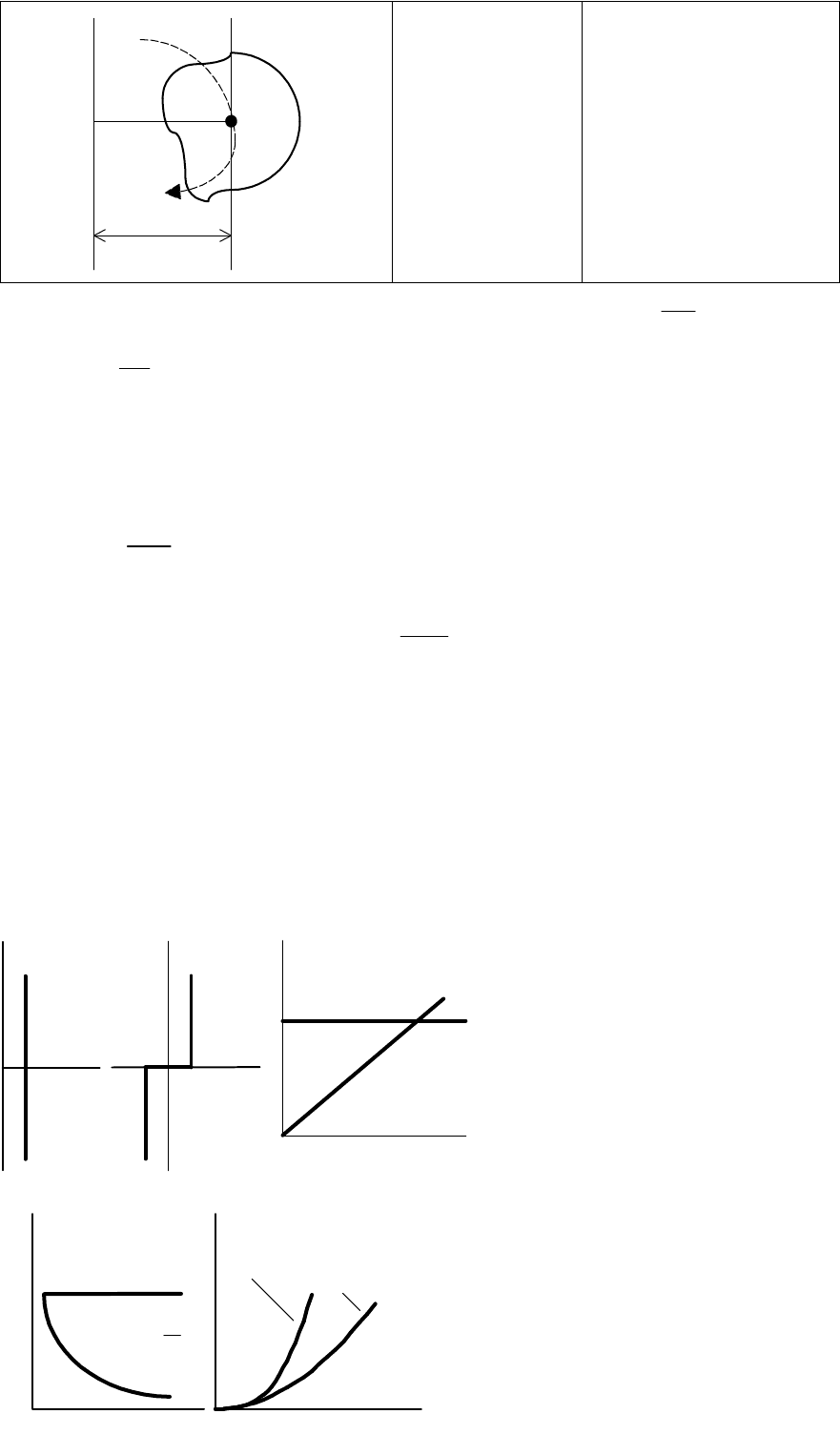
1.4. Моменты нагрузки и трения
Статические моменты и силы сопротивления движению привода (
сс
, FМ
) определяются действием сил трения и тяжести. Часть их
является полезной нагрузкой. Моменты или силы полезной нагрузки
действуют на конечном звене кинематической передачи. Они могут быть
активными и реактивными по характеру, постоянными, переменными или
случайными во времени, зависящими от скорости, пути и т.д. (рис. 1.6).
Рис. 1.6. Виды нагрузок
по характеру: а –
активная; б – реактивная;
по виду зависимости от
скорости: в – с
11
постоянным моментом, г – с постоянной мощностью; д – вентиляторного
характера
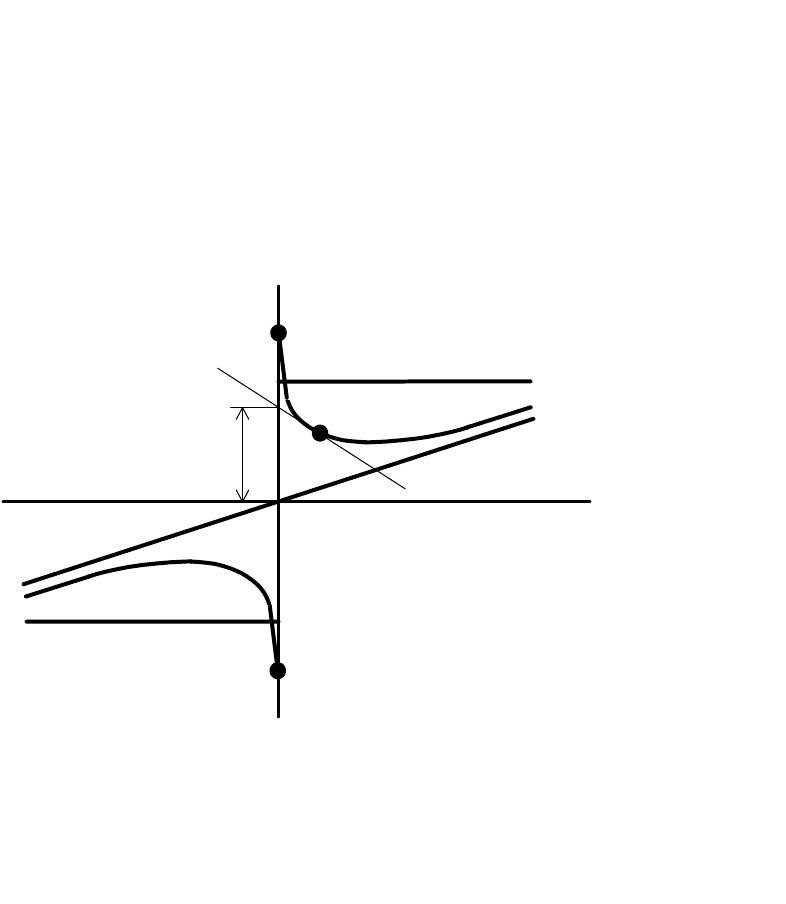
Во всех движущихся элементах кинематической цепи механизма
имеют место потери на трение, которые определяют моменты (силы)
сопротивления движению, приложенные к соответствующим массам.
Эти моменты (силы) определяются силами внешнего трения в
элементах кинематической цепи. Они имеют реактивный характер и
зависят от скорости движения, т.к. от скорости зависит коэффициент
трения (рис. 1.7). При сухом трении зависимость
)(
с.тр
М
имеет
релейный характер, при чисто жидкостном – линейный. При смешанном
(вязком) трении, когда при наличии смазки имеет место и эффект
сухого трения, зависимость
)(
с.тр
М
имеет сложный характер: большой
момент трогания определяется сухим трением и высокой начальной
вязкостью смазки; спадающий участок объясняется улучшением
условий смазки; возрастающий при больших скоростях объясняется
ростом сил жидкостного трения.
Рис. 1.7.
Характер
зависимости
моментов
трения: 1 – при
сухом; 2 – при
жидкостном; 3 –
при смешанном
трении
В области небольших отклонений от значения рабочей скорости
(т. А на рис. 1.7) в общем случае нелинейную зависимость момента
трения от скорости,
)(
с.тр
М
, можно линеаризовать, приняв
12
1
3
2
трог.с
М
тр.с
М
т. А
0c
M

c0cс.тр
sign)( bMfМ
, (1.8)
где
sign
с0с
ММ
– характеристика момента сухого трения;
0c
M
– значение момента при
0
;
сс
bМ
– характеристика момента жидкостного трения;
t
M
b
d
d
c
c
– коэффициент внешнего трения (внешнего демпфирования).
Для сухого трения
0
c
b
, для вязкого
0
c
b
, для смешанного
0
c
b
.
Величины сил и моментов трения зависят и от значения полезной
нагрузки, т.к. от этого зависят усилия в соединениях передаточного
механизма. Моменты сопротивления от сил тяжести имеют активный
характер (рис. 1.6, а).
Релейный характер моментов реактивной нагрузки и трения
определяет нелинейность структуры механической системы
электропривода и существенно усложняет ее анализ при
знакопеременной скорости.
1.5. Деформация, податливость и жесткость элементов
кинематической цепи
Реальные звенья в кинематической цепи и элементы конструкции
привода обладают конечной жесткостью и поэтому при передаче
вращающих моментов и движущих сил подвергаются деформациям.
Для элементов привода эти деформации являются упругими, т.е.
подчинены закону Гука.
Все элементы механической системы привода испытывают в той
или иной степени упругие деформации. Прежде всего, это линейные,
угловые и изгибные деформации. Деформация элементов привода при
передаче движущих моментов и сил приводит к дополнительной
ошибке воспроизведения приводом заданной траектории движения и
возникновению колебательных процессов в механической системе, что
может быть причиной возникновения автоколебаний в электроприводе
в целом. Строго говоря, оценка степени влияния упругих деформаций
элементов привода с целью принятия обоснованного решения об учете
или не учете их при расчете и настройке электропривода механизма
является обязательной. Наличие в кинематической цепи длинных
валопроводов, винтовых передач, тяговых канатов, ременных передач,
упругих рабочих органов (например, прорезиненных лент
транспортеров), обрабатываемого материала, связывающего отдельные
секции многодвигательного привода непрерывных агрегатов, и т.п.
однозначно определяет необходимость учета упругих свойств этих
элементов.
Линейная деформация, линейная податливость и жесткость
13
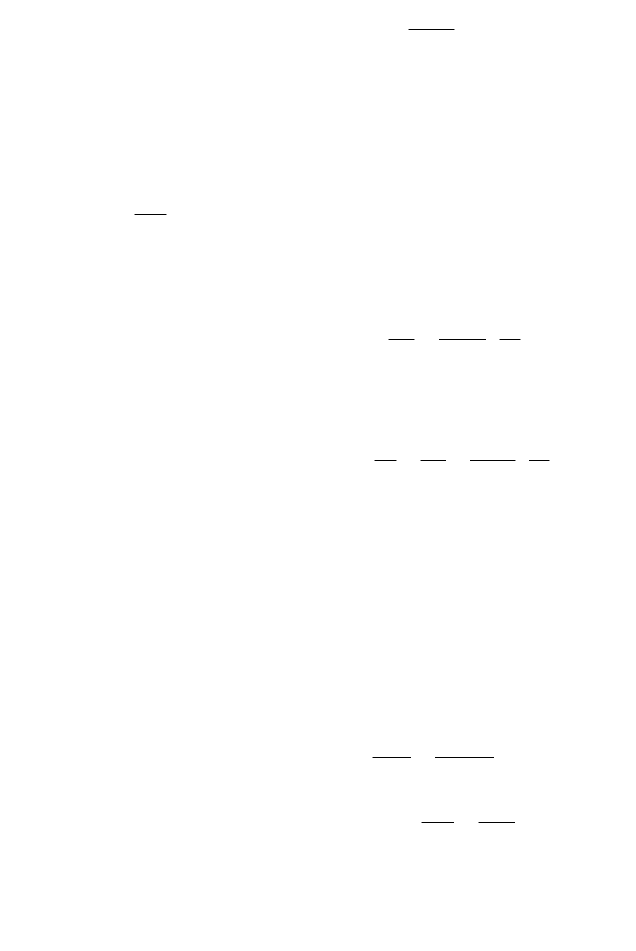
При сжатии (растяжении) стержня осевой силой F (рис. 1.8, а)
абсолютная деформация (сжатие или удлинение) в соответствии с
законом Гука определяется выражением
ES
lF
l
, м, (1.9)
где F – осевое усилие, Н;
S – площадь поперечного сечения стержня,
2
м
;
l – длина стержня, м;
Е – модуль продольной упругости, для стали равный
2
11
м
Н
101.2 E
.
Отношение величины усилия к значению линейной деформации
называют линейной жесткостью (коэффициентом линейной жесткости)
м
Н
,
l
SE
l
F
с
l
. (1.10)
Величина, обратная линейной жесткости, называется линейной
податливостью
Н
м
,
1
SE
l
F
l
c
l
l
. (1.11)
Если стержень ступенчатый, то полное удлинение стержня равно
сумме удлинения отдельных участков
n
i
i
ll
1
,
и тогда линейная податливость и жесткость стержня соответственно
равны:
n
i
li
n
i
i
l
F
l
F
l
1
1
; (1.12)
l
F
c
l
l
1
. (1.13)
В результате упругих линейных деформаций элементов
кинематической цепи в них возникают (они передают) упругие силы
Н,
упр
lсF
l
. (1.14)
Упругие силы являются движущими силами для последующих
элементов передачи.
Угловая деформация, угловая податливость и жесткость
При кручении стержня (вала) вращающим моментом М (рис. 1.8, б),
приложенным в плоскости, перпендикулярной оси стержня, угол
закручивания вала в соответствии с законом Гука определяется
выражением
14
рад,
p
JG
lM
, (1.15)
где М – вращающий момент,
мН
;
l – длина стержня (вала), м;
G – модуль сдвига, для стали
2
10
м
Н
101.8 G
;
p
J
– полярный момент инерции сечения вала,
4
м
.
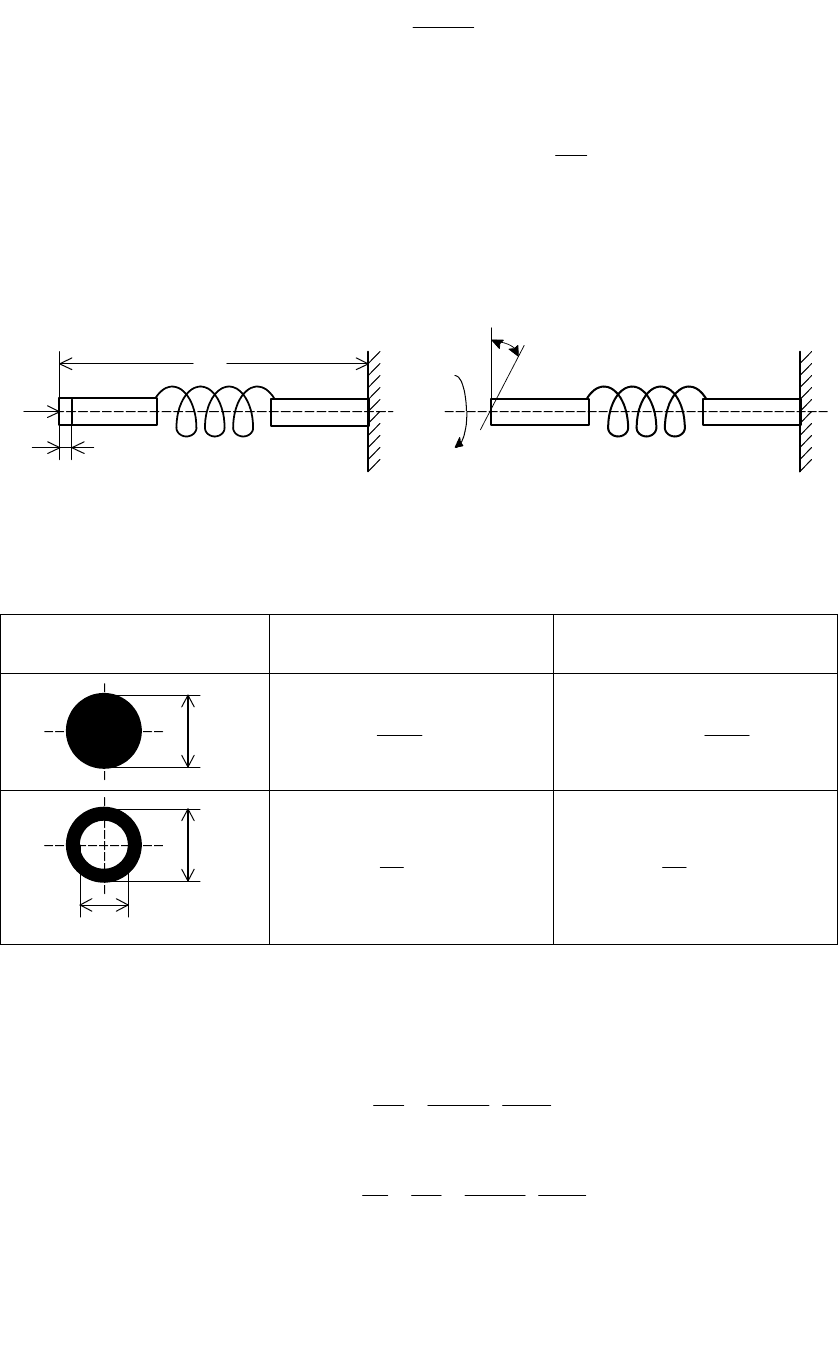
Зависимости для полярных моментов инерции
p
J
простейших
сечений приведены в табл. 1.3.
М
б
l
F
l
а
Рис. 1.8
Таблица 1.3
Форма сечения
Полярный момент
инерции,
4
м
Осевой момент
инерции сечения,
4
м
D
x x
4
4
1.0
32
D
D
J
р
64
4
D
J
x
d
x x
D
)(
32
44
dDJ
р
)(
64
44
dDJ
x
Отношение величины крутящего момента к значению угловой
деформации называют угловой (крутильной) жесткостью
(коэффициентом угловой жесткости)
рад
мН
,
l
JG
M
с
p
. (1.16)
Величина, обратная угловой жесткости, называется угловой податливостью
мН
рад
,
1
p
JG
l
Мс
. (1.17)
Если вал ступенчатый, то полный угол закручивания вала
находится как сумма углов закручивания отдельных участков
n
i
i
1
,
15
и тогда угловая податливость и жесткость вала определяются
выражениями:
n
i
i
n
i
i
MM
1
1
; (1.18)
M
c
1
. (1.19)
В результате упругих угловых деформаций элементов
кинематической цепи в них возникают (они передают) упругие моменты
мН,
упр
сM
. (1.20)
Упругие моменты являются движущими моментами для
последующих элементов передачи.
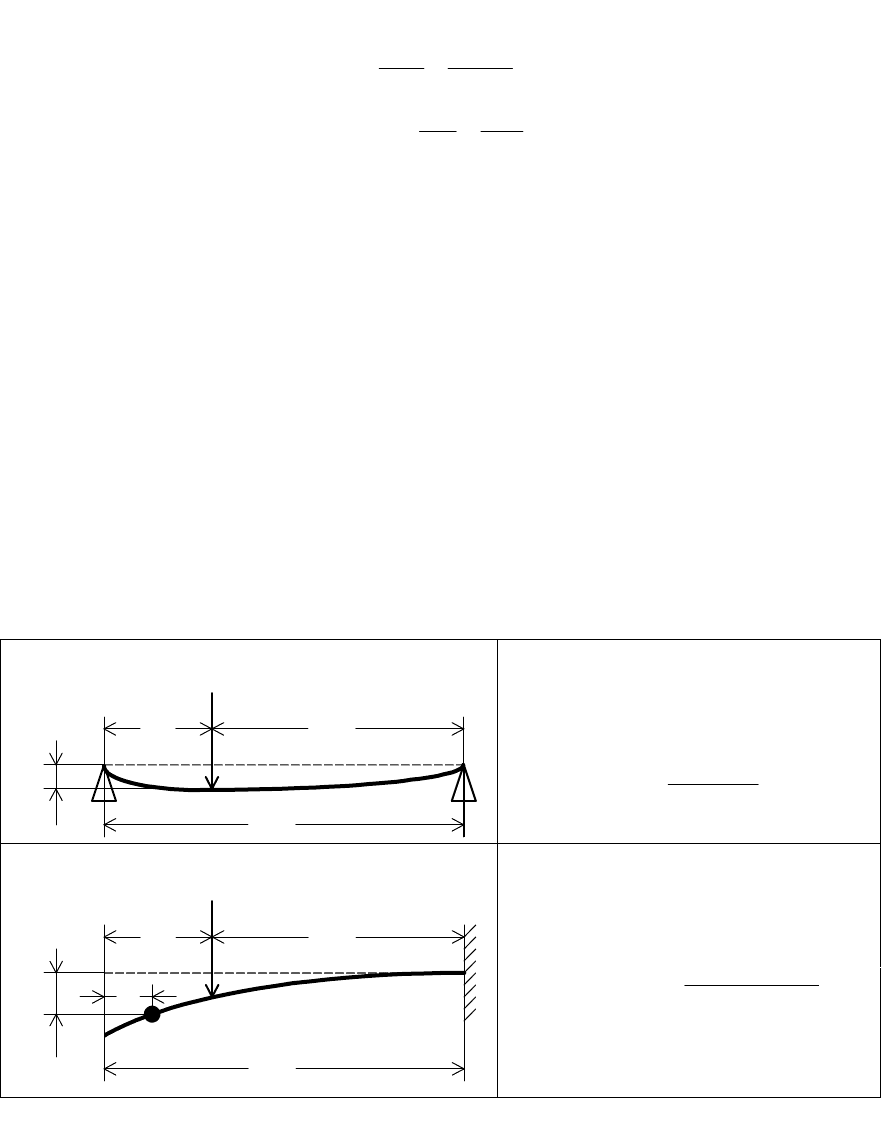
Деформации при изгибе, изгибная жесткость и податливость
При поперечной нагрузке балок, стержней, валов деформация
(прогиб) зависит от длины балки, формы ее поперечного сечения, вида
опор, места приложения нагрузки. Для простейших случаев изгиба
балок постоянного сечения поперечной сосредоточенной силой
основные расчетные соотношения для прогиба приведены в табл. 1.4.
Таблица 1.4
Балка, свободно опертая по концам
l
b a
F
y
Прогиб в точке приложения
силы F, м
lJE
baF
y
x
F
3
22
Консоль, жестко заделанная
l
b
a
F
y
x
A
Прогиб в точке А
)33(
6
232
xaaba
JE
F
y
x
Fx
Примечание к табл. 1.4:
x
J
– осевой момент инерции сечения балки по
отношению к линии, проходящей перпендикулярно плоскости изгиба через
центр тяжести сечения (табл. 1.3).
Изгибная жесткость и податливость для рассматриваемых точек
определяются соотношениями:
16
м
Н
,
F
y
y
F
с
;
Н
м
,
1
F
y
c
F
y
y
. (1.21)
1.6. Соединение упругих элементов
В зависимости от конструкции кинематической цепи упругие
элементы в ней могут быть соединены последовательно или
параллельно. При параллельном соединении результирующая жесткость
равна сумме жесткостей отдельных элементов, а при последовательном
– результирующая податливость является суммой податливостей
элементов. Тогда при параллельном соединении упругих элементов
n
сссс
21э
, (1.22)
n
n
сссс
111
111
21
21э
э
(1.23)
и при последовательном соединении
n
21э
, (1.24)
n
n
ccc
c
111
111
21
21э
э
. (1.25)
Рассмотрим более подробно этот вопрос на примере передачи
винт – гайка металлорежущих станков и промышленных роботов
(рис. 1.9). Общая жесткость передачи определяется следующими
составляющими: эквивалентной крутильной жесткостью узлов
кинематики, расположенных между винтом и двигателем; линейной
жесткостью ходового винта при его растяжении (сжатии) осевым
тяговым усилием (подачи)
п
F
; крутильной жесткостью винта при его
закручивании вращающим моментом М; контактной жесткостью узла
винт – гайка; жесткостью осевых опор винта; жесткостью соединений
гайки со столом; жесткостью соединений подшипников со станиной.
На рис. 1.9 представлены две наиболее часто встречающиеся
схемы расположения опор ходовых винтов механизмов подач
металлорежущих станков (схема I и IV). Пара радиально-упорных или
упорных подшипников с предварительным натягом предотвращают
осевой сдвиг винта в обоих направлениях. Короткие винты с
отношением длины винта к диаметру
2520
в
в
d
l
выполняются с одной
парой упорных подшипников (рис. 1.9, а). В этом случае все упругие
элементы соединены последовательно и результирующая податливость
передачи
7654321э llllllll
, (1.26)
17

где
1l
– крутильная податливость узлов кинематики между
двигателем и винтом, приведенная к поступательному перемещению;
2l
– крутильная податливость винта, на длине
1
x
, приведенная
к поступательному перемещению;
3l
– контактная податливость узла винт – гайка;
4l
– податливость соединения гайка–стол;
5l
– осевая податливость винта на длине
2
x
;
6l
– податливость упорного подшипника;
7l
– податливость соединения подшипник–станина.
Наибольшее значение податливость (наименьшее жесткость)
передачи имеет при крайнем правом положении стола
)макс,макс(
21
xx
.
m
6
4
21
1l
2l
3l
4l
6l
7l
1l
c
2l
c
3l
c
4l
c
п
F
п
F
М
М
7l
6l
'
5
l
''
5l
'
5
l
6
l
7
l
ccc
7l6l
''
5l
ccc
'
lэ
c
''
lэ
c
б
33
5
1
x
2
x
2
xl
m
6
4
21
1l
2l
3l
4l
5l
6l
7l
1l
c
2l
c
3l
c
4l
c
5l
c
6l
c
7l
c
п
F
п
F
М
М
а
3
5
1
x
2
x
Рис. 1.9. Упрощенная кинематическая схема привода подачи с
передачей винт – гайка: а – с одним закрепленным концом; б – с двумя
закрепленными концами; 1 – электродвигатель; 2 – соединительная
муфта; 3 – пара упорных подшипников; 4 – винт; 5 – ходовая гайка; 6 –
стол; М – вращающий момент электродвигателя;
п
F
–- усилие
подачи
С целью повышения осевой жесткости винтовой передачи и
привода в целом, для длинных винтов применяют две пары упорных
подшипников (рис. 1.9, б). Для этого случая имеет место смешанное
18
соединение упругих элементов и тогда результирующая податливость
передачи
пар4321э llllll
, (1.27)
где
''
э
'
э
пар
1
ll
l
сс
– результирующая податливость параллельного соединения
элементов передачи;
76
''
5
''
э
76
'
5
'
э
1
;
1
lll
l
lll
l
cc
где
''
5
'
5
,
ll
– осевые податливости участков винта
2
x
и
)(
2
xl
,
расположенные слева и справа от ходовой гайки.
Максимум податливости
парl
имеет место при
lx 5.0
2
765
макс
пар
5.05.0
llll
, (1.28)
где
''
5
'
55 lll
– осевая податливость винта длиной l.
Эквивалентная линейная жесткость передачи в общем случае равна
э
э
1
l
l
с
.
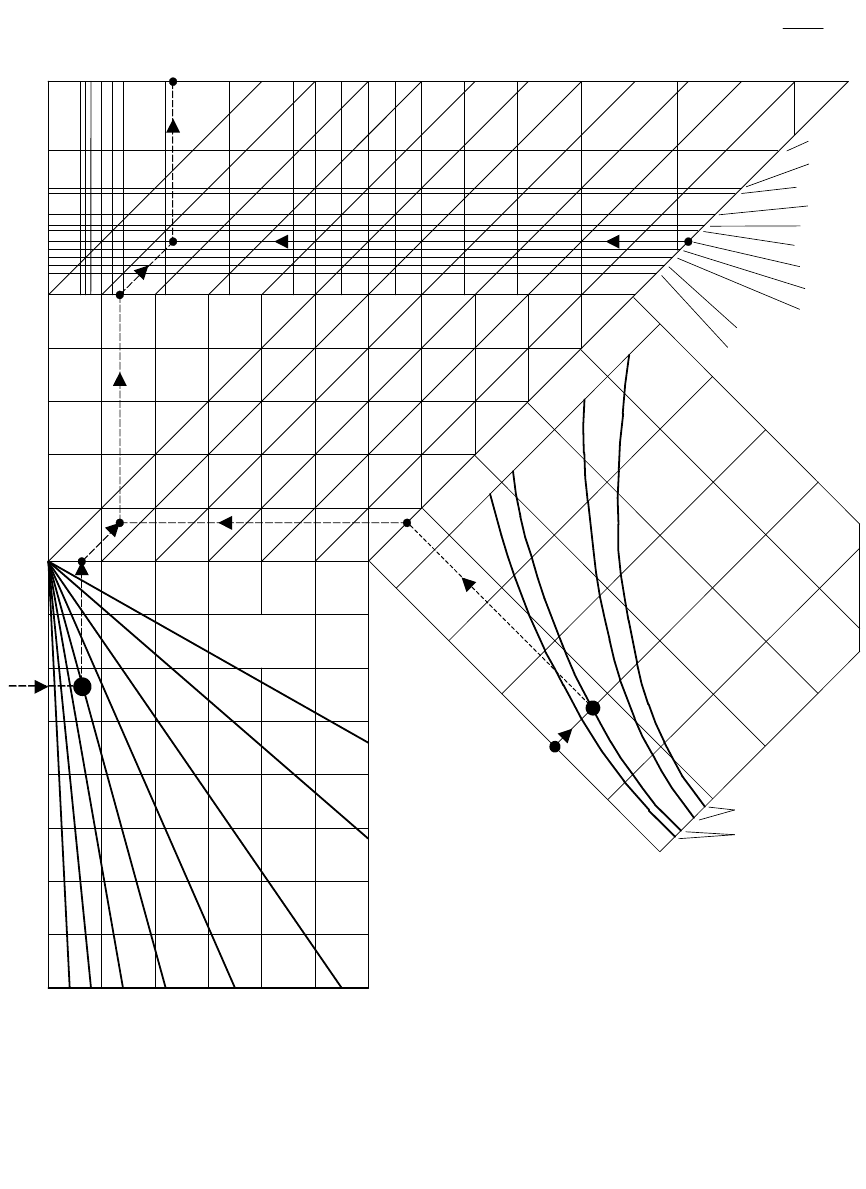
Для механизмов привода подачи с шариковой винтовой передачей
разработана номограмма (рис. 1.10), определяющая зависимость
суммарной осевой жесткости
эl
c
от типоразмера передачи и схемы
расположения опор [5]. Номограмма позволяет определить суммарную
осевую жесткость при заданной конструкции механизма или определить
конструкцию по требуемому значению осевой жесткости. При схеме
опор I в качестве длины
макс
l
принимается максимальное расстояние от
середины гайки до середины опоры (
макс2макс
xl
). При схеме опор IV в
качестве длины
макс
l
принимается расстояние между серединами обоих
опор, а полученное значение
эl
c
соответствует среднему положению
гайки между опорами.
1.7. Жесткость и податливость валов и их соединений
Осевая жесткость и податливость валов
Расчет осевой (линейной) жесткости и податливости валов при
растяжении или сжатии осевым усилием выполняется по выражениям
(1.10) – (1.13).
Крутильная жесткость и податливость валов
Расчет угловой (крутильной) жесткости и податливости валов при
кручении выполняется по выражениям (1.16) – (1.19).
19
5060708090100150200300500
520
525
1032
532
1040
540
1050
550
1063
)2080(1080
)20100(10100
25
32
40
5063
80100
900
600
300
Схема IV Схема I
3600
2400
1200
20
30
40
50
60
1
2
1
2
Схема I
Схема IV
мм,d
0
мм,l
мм,l
макс
вв
td
мм20d
в
1410
мкм
Н
,
эl
c
Рис. 1.10. Номограмма для расчета осевой жесткости механизма
привода подач на базе шариковой винтовой передачи и
комбинированных роликовых подшипников: 1 – подшипники легкой серии; 2
– подшипники тяжелой серии;
вв
, td
– диаметр и шаг винта;
0
d
– диаметр
шейки под подшипник; схема I – схема с одной закрепленной опорой винта;
схема IV – схема с двумя закрепленными опорами винта
Контактная жесткость и податливость передачи винт – гайка
20