Удут Л.С., Кояин Н.В., Мальцева О.П. Проектирование и исследование автоматизированных электроприводов. Часть 6 Механическая система электропривода
Подождите немного. Документ загружается.

массы;
i
M
c
– момент трения на валу i массы;
i
J
– момент инерции i
сосредоточенной массы;
i
–- угловая скорость вращения вала i массы;
c
–
коэффициент жесткости невесомой связи;
– коэффициент
податливости связи;
в
b
– коэффициент внутреннего демпфирования;
з
–
зазор связи
Приведение скоростей и перемещений
Приведение скоростей и перемещений производится по
выражениям (1.1) и (1.2), приведенным в подразделе 1.2.
Приведение моментов и сил
Приведение моментов и сил к одной скорости (оси)
осуществляется на основании равенства мощностей:
VFМММ
прпрпрпр
;
. (2.1)
На основании выражения (2.1) можно записать для передачи
вращательного движения
i
M
kМММ
пр
пр
(2.2)
и для передачи вращательного движения в поступательное
FkF
V
FМ
пр
пр
. (2.3)
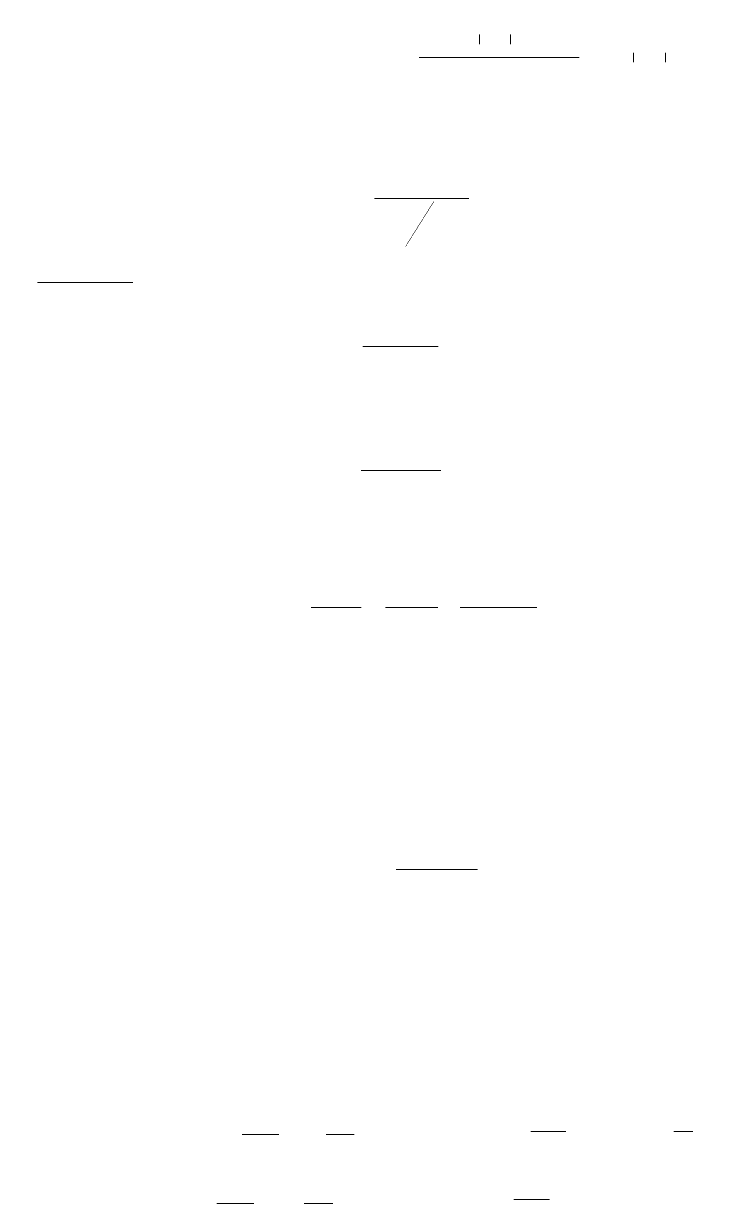
Учет потерь в передачах
В реальных передачах имеют место потери на трение. Поэтому
приведение моментов от входной оси передачи к выходной или наоборот
осуществляется с учетом не только передаточного числа i, но и
коэффициента полезного действия (КПД)
для соответствующего
направления передачи момента.
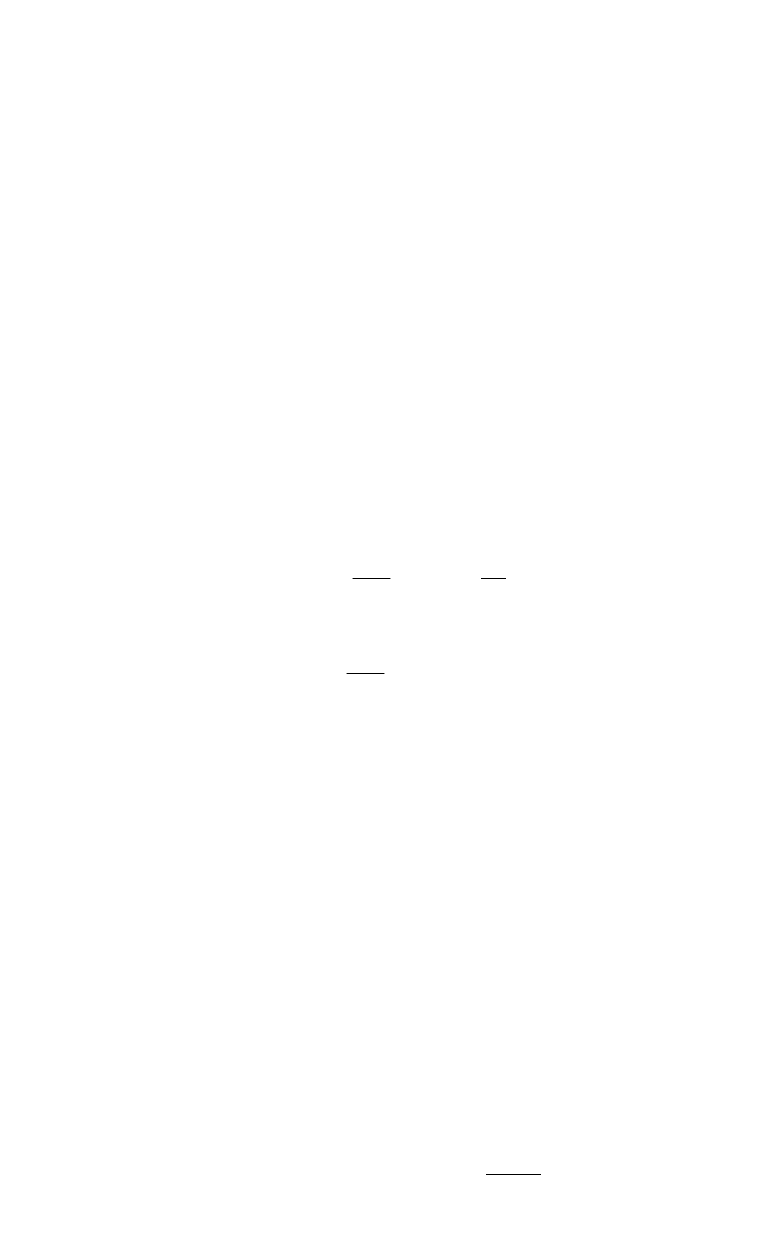
Поясним сказанное на примере. Пусть механизм при передаче
момента в прямом направлении имеет КПД
п
η
, а в обратном –
о
η
(рис. 2.2, а). Для простоты будем считать, что все моменты приведены к
одной оси в соответствии с выражением (2.2). Тогда в общем случае
моменты на входной и выходной оси механизма связаны
соотношениями:
,;
вых
вхвхвых
М
МММ
(2.4)
где
– КПД механизма в соответствующем направлении передачи
момента.
Поскольку КПД передачи нелинейно зависит от величины
передаваемого момента то и выражения (2.4) нелинейные, что
31
затрудняет расчеты и моделирование механической системы
электроприводов. Более целесообразно при составлении расчетных и
структурных схем механической системы учитывать непосредственно
моменты (или силы) трения в передачах. Если потери в передаче
представить в виде суммы постоянных (не зависящих от величины
передаваемого момента) и переменных потерь (рис. 2.2, б), тогда в
общем виде можно записать:
выхпостпервыхвх
signMММММ
, (2.5)
где
вых.номпост
МaМ
– величина постоянных потерь;
выхпер
МbМ
– переменные потери;
a и b – коэффициенты соответственно постоянных и переменных
потерь, постоянные по величине;
вых.ном
М
– номинальный (расчетный) выходной момент передачи.
М
пост
i
М
пер
i
М
вых
i
М
вх
вых
М
ММ
,
вх
Передаточный
механизм
i
М
вых
вых
М
вых
М
М
вх
М
вх
п
о
а б
Рис. 2.2. Учет потерь
в передаточных
механизмах: а – схема
передачи момента через
механизм; б – графики
зависимости входного и
выходного моментов и
моментов потерь
передачи; в –
зависимость КПД
механизма от величины
передаваемого момента
32
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1
0.85
0.8
0.75
0.7
0.65
9.0
ном
в
вых.ном
2
вых
М
М
На основании (2.5) запишем выражение для приведения моментов
передачи с учетом потерь:
;sign)1(
выхпоствыхвх
МММbМ
(2.6)
.если,
1
sign
,если,0
поствх
вхпоствх
вых
посвхвых
ММ
b
МММ
М
МММ
(2.7)
Коэффициенты потерь определяются для каждого направления
передачи момента. Значения коэффициентов а, b и КПД
связаны
соотношением
b
а
1
1
, (2.8)
где
вых.ном
вых
М
М
– коэффициент нагрузки.
При
1
имеем
bа
1
1
ном
.
Для нахождения численных значений коэффициентов а и b
достаточно знать один из них, а второй находится из выражения
аb
ном
ном
1
. (2.9)
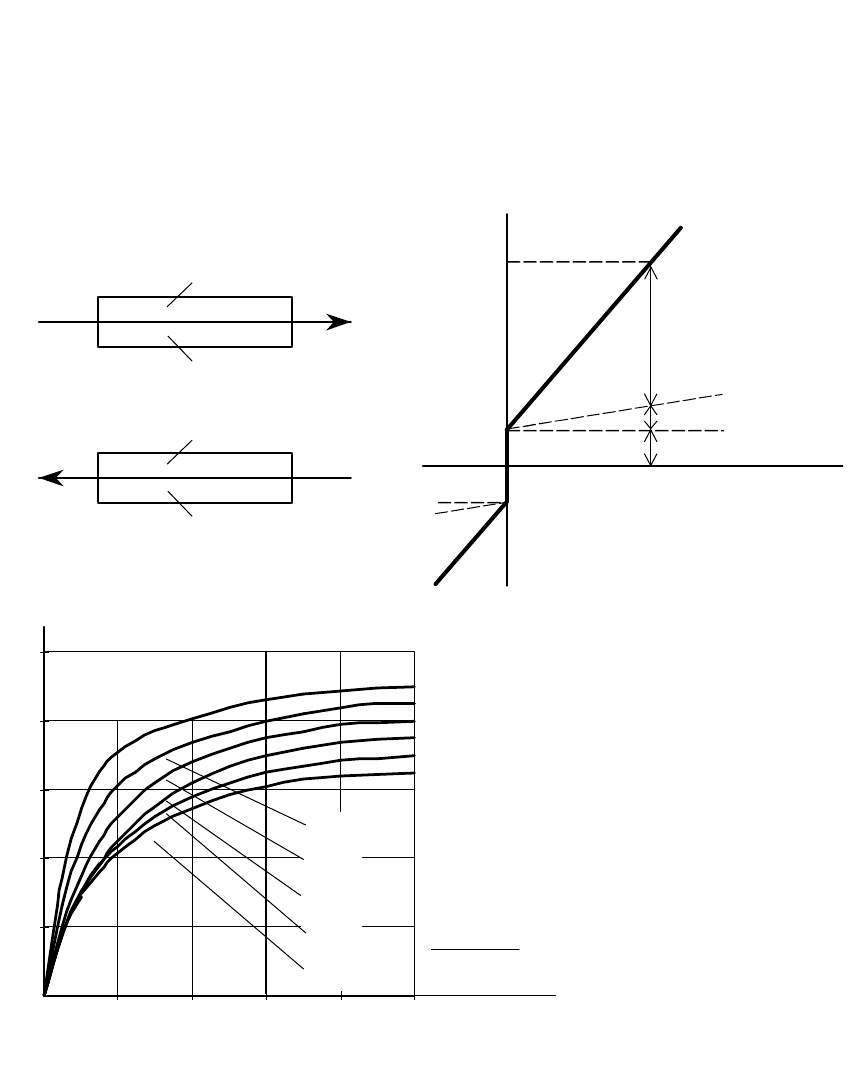
Если известна кривая КПД передачи, то значение коэффициента а
определяется по выражению
ном
ном
11
1
i
i
i
i
а
. (2.10)
Значения коэффициента целесообразно определить в нескольких
точках кривой КПД и окончательно принять некоторое усредненное
значение. В реальных передачах при малых нагрузках основную роль
играют постоянные потери, а при больших – переменные потери. С
достаточной для практики точностью можно принять, что при передаче
номинального момента постоянные и переменные потери равны, тогда
.
2
1
ном
ном
ba
(2.11)
Приведение моментов инерции и масс
Приведение моментов инерции вращающихся звеньев и
поступательно движущихся масс производится на основании равенства
кинетических энергий в расчетной и реальной схемах:
22
2
2
пр
пр
JJ
, тогда
2
2
2
пр
пр
i
J
kJJJ
; (2.12)
22
2
2
пр
пр
V
mJ
, тогда
22
2
пр
пр
mkm
V
mJ
. (2.13)
33
Приведение коэффициентов жесткости и податливости
Выражения для приведения жесткости получим на основании
полученных выражений для приведения моментов, сил и перемещений.
Упругие моменты для вращательного движения могут быть
приведены на основании выражения (1.49)
пр
упрпрупр.
ММ
.
Учитывая, что
cМcМ
упрпрпрпрупр.
,
,
а приведенный угол поворота согласно выражению (1.1)
пр
пр
,
можно записать
пр
пр
пр
сc
и окончательно
2
2
2
пр
пр
i
c
kссс
. (2.14)
Податливость является величиной обратной жесткости, тогда
2
2
2
пр
пр
i
k
. (2.15)
Аналогично для передачи вращательного движения в
поступательное
пр
упрпрупр.
V
FМ
,
где
V
llcFcМ
l
пр
прупрпрпрпрупр.
;;
,
тогда
пр
пр
пр
V
lс
V
lc
l
и окончательно
22
2
пр
пр
lll
ckc
V
сс
, (2.16)
22
2
пр
пр
ll
l
k
V
. (2.17)
Приведение коэффициентов внутреннего демпфирования
34
При вращательном движении приведенный момент внутреннего
трения находится по выражению (1.53)
пр
впрв
МM
,
где
t
bM
d
d
пр
првпрв
;
пр
пр
– согласно (1.1);
t
bМ
d
d
вв
,
тогда
пр
в
пр
прв
d
d
d
d
t
b
t
b
и окончательно
2
в
2
в
2
пр
впрв
i
b
kbbb
. (2.18)
Аналогично для передачи вращательного движения в поступательное
пр
впрв
V
FM
,
где
t
bM
d
d
пр
првпрв
;
V
l
пр
пр
;
t
l
bF
l
d
d
вв
,
тогда
пр
в
пр
прв
d
d
d
d
V
t
l
b
Vt
l
b
l
и окончательно
2
в
2
в
2
пр
впрв
lll
bkb
V
bb
. (2.19)
Приведение зазоров
Кинематические зазоры, угловые
з
и линейные
з
l
,
приводятся как и перемещения по соотношениям (1.1) и (1.2).
2.2. Структурная схема инерционной массы механической
системы без учета потерь в передачах
При выбранных кинематических зазорах перед и после i-й массы
ее поведение без учета потерь в передачах описывается следующей
системой уравнений:
,)()(
d
d
;d)()(
;
;
;
d
d
1)1(в
)1(
)1(в)1(в
1)1(
)1()1()1(у
)1(в)1(у)1(
c)1()1(
ttb
t
bM
ttt
cM
MMM
t
JMMМ
iiii
ii
iiii
iiii
iiiiii
iiiiii
i
iiiiii
(2.20)
35

где
М
– результирующий момент, передаваемый через упругое звено;
у
М
– упругий момент;
в
М
– момент внутреннего трения упругого звена;
c0сс
sign bММ
– момент смешанного трения на валу массы;
0с
М
– момент сухого трения;
c
b
– коэффициент внешнего трения;
с
– коэффициент угловой жесткости;
в
b
– коэффициент внутреннего трения.
Если непосредственно перед i-й массой открывается зазор, то в
системе уравнений (2.20) принимается
0
)1(
ii
М
; если зазор
открывается после i-й массы, то принимается
0
)1(
ii
М
. Таким образом,
из-за наличия зазоров в кинематической цепи и моментов
сопротивления движению типа сухого трения, система уравнений (2.20)
является существенно нелинейной.
Запишем систему уравнений (2.20) в операторной форме
.)()()(
;)()()(
);()()(
);()()()(
1)1(в)1(в
1)1()1(у
)1(в)1(у)1(
c)1()1(
ttbtM
ttctMp
tMtMtM
tpJtMtMtM
iiiiii
iiiiii
iiiiii
iiiiiii
(2.21)
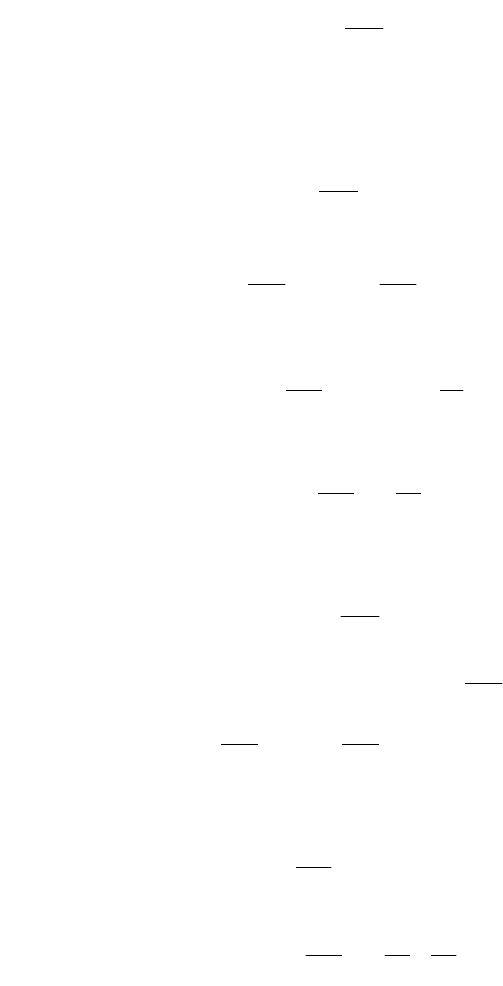
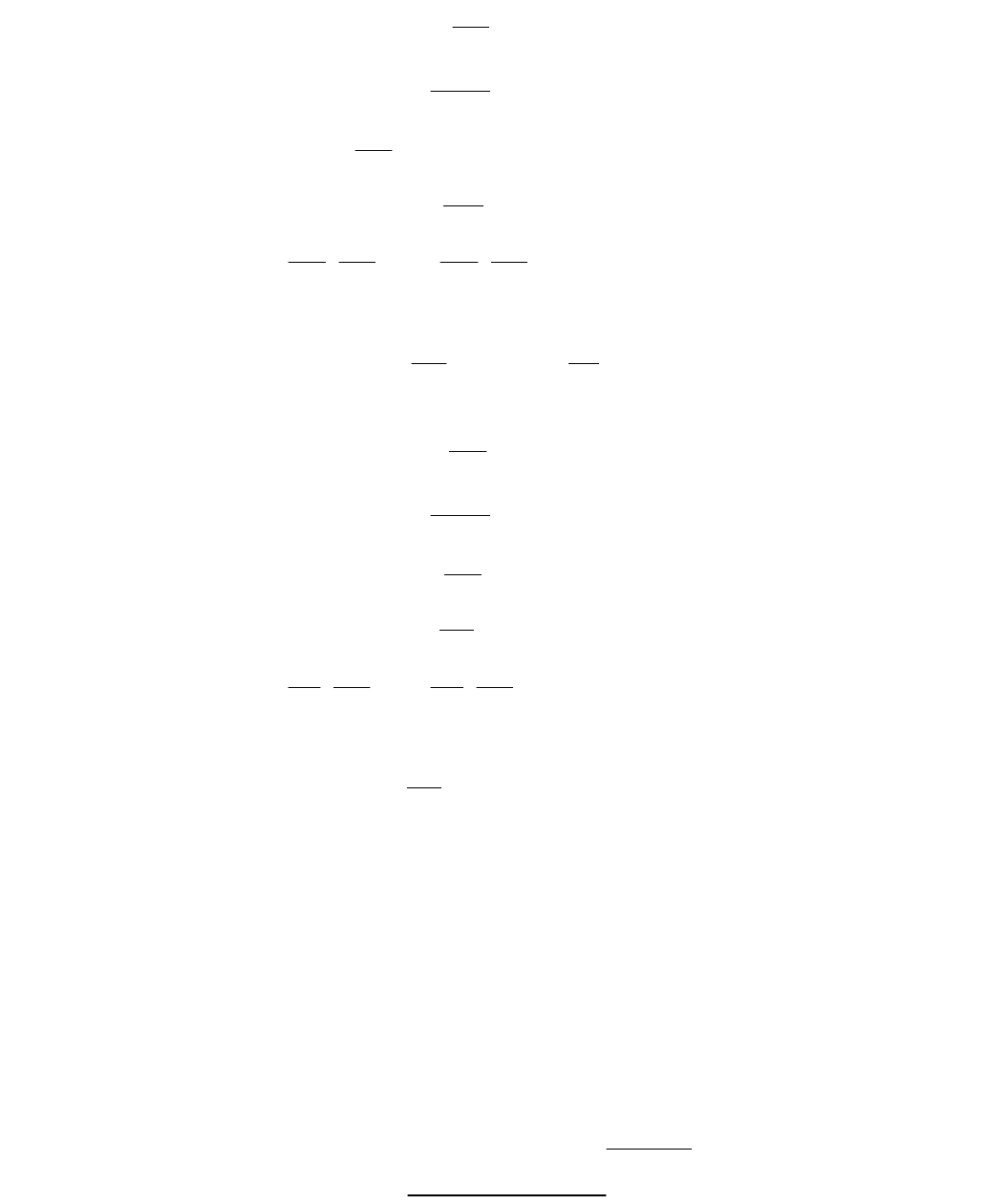
В соответствии с (2.21) на рис. 2.3 представлена структурная схема для
i-й массы с учетом зазора
з
. На структурной схеме (рис. 2.3, а)
пунктирными линиями выделен типовой модуль, описывающий
поведение инерционной массы. Структурная схема n-массовой
механической системы составляется из n таких модулей.
36
pJ
1
i
c
b
i)1i
(
M
p
1
)1i(i
c
(-)
pJ
1
)1i(
)1i(с
b
)1i(
)1i(
(-)
)1i
(
i
М
)1i(i
М
(-)
co
М
c
М
i
)1i(i
)1i(i
а
)1i(со
М
)1i(с
М
(-)
(-)
c
b
pJ
1
i
pJ
1
)1i(
)1i(с
b
)1i(
i)1i(
M
i
)1i(i
М
c
М
(-)
(-)
)1i(i
)1i(
)1i(i
М
(-) (-)
(-)
)1i(с
М
б
i
i
i
2
)1(з
ii
)1(у
ii
)1(у ii
М
)1(в
ii
bp
)1(в ii
М
)2)(1( ii
М
)2)(1( ii
М
)1(в ii
М
)1(у ii
М
i
i
)1(
1
ii
c
p
)1(в ii
b
массыймодуль i
-
массыймодуль i
-
Рис. 2.3. Типовой модуль инерционной массы структурной схемы
многомассовой механической системы без учета потерь в передачах: а –
нелинейной с учетом зазора и моментов сопротивления типа сухого трения; б –
линеаризованной
На рис. 2.3, б приведена структурная схема модуля инерционной
массы, для которой принято: кинематические зазоры и моменты типа
сухого трения отсутствуют. Аналогичную структурную схему, но в
приращениях, можно применить при допущениях: кинематические
зазоры закрыты, а упругие связи загружены; моменты типа сухого
трения численно постоянные, а скорость вращения массы
знакопостоянная. Эта схема модуля соответствует линеаризованной
механической системе привода.
37
2.3. Преобразование расчетной схемы механической системы
Преобразование расчетной схемы механической системы
электропривода осуществляется с целью уменьшения числа ее
инерционных масс, упрощения структурной схемы и понижения
порядка дифференциального уравнения математического описания.
Основанием для такого упрощения является общепринятый при
исследовании систем автоматического управления подход, который
применительно к данному случаю может быть сформулирован
следующим образом. Влиянием частот собственных колебаний
механической системы, лежащих за пределами области частот, в
которой исследуется поведение электропривода, можно пренебречь.
Пренебрежение одной из частот (высшей) собственных колебаний
равносильно уменьшению на единицу числа масс расчетной
механической системы, что делается путем их соответствующего
объединения. При решении данной задачи достаточно ограничиться
рассмотрением расчетной (рис. 2.1) n-массовой линеаризованной
колебательной системы без учета зазоров (
з
), внутреннего и
внешнего демпфирования и потерь в передачах (
,0,0,0
с
аbb
в
)0b
.
Методика преобразования расчетной схемы механической
системы электропривода заключается в следующем:
1. Исходная схема (рис. 2.1) разбивается (без учета начальной
1
J
и
конечной
n
J
масс) на отдельные простейшие (парциальные) системы
типа А (рис. 2.4, а) и типа Б (рис. 2.4, б). Общее число парциальных
систем равна (2n – 5), из них типа А – (n – 3) и типа Б (n – 2).
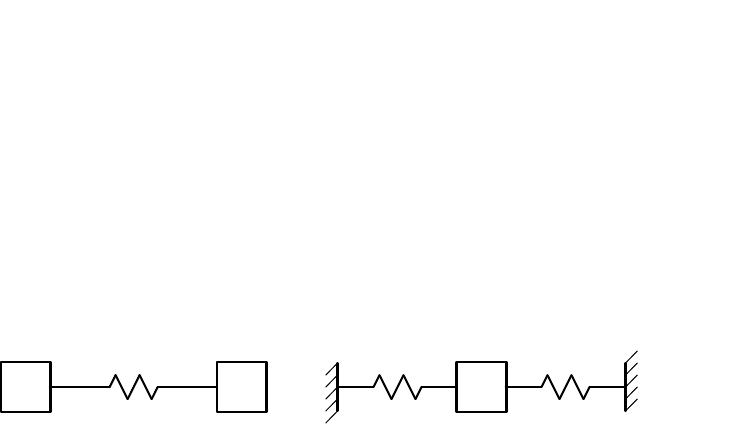
а
J
б
1
1
с
2
с
2
1
J
2
J
12
12
c
Рис. 2.4. Парциальные системы для вращательного
движения: а – система типа А; б – система типа Б
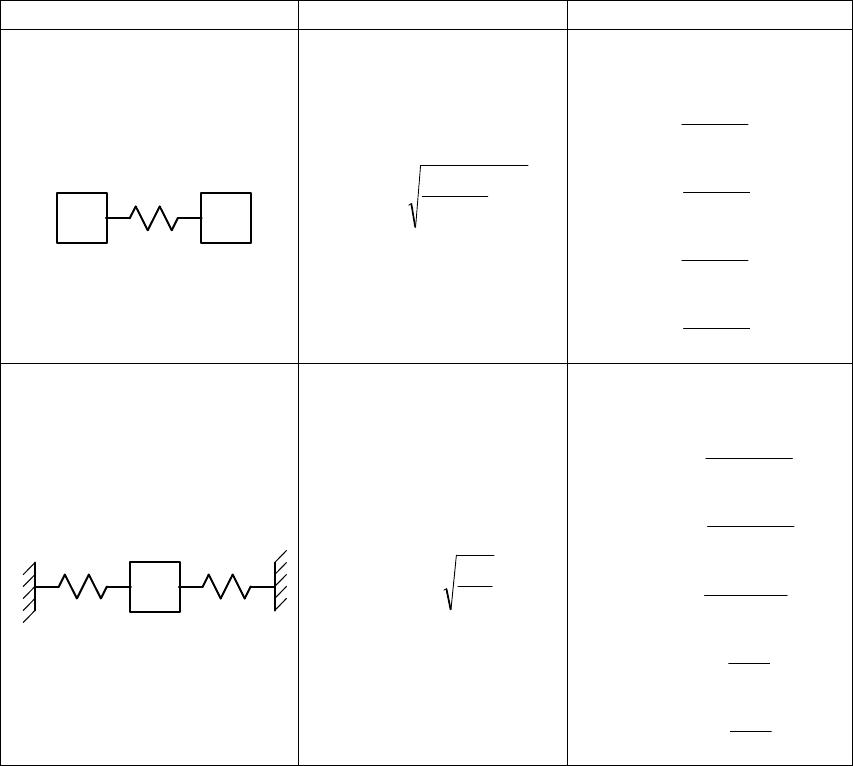
2. Для всех выделенных парциальных систем определяются частоты
собственных колебаний (парциальные частоты) по выражениям,
приведенным в табл. 2.2.
3. Выделяется парциальная система, имеющая наибольшую частоту
собственных колебаний.
38
Если частота собственных колебаний парциальной системы лежит в
области частот работы электропривода, то упрощение исходной
расчетной схемы механической системы невозможно.
Если же значение частоты собственных колебаний парциальной
системы лежит за пределами области частот работы электропривода,
то число масс исходной расчетной схемы можно уменьшить на одну.
Таблица 2.2
Расчетная система Расчетные формулы Формулы приведения
1
J
2
J
12
12
с
Типа А
12
21
21
пА
c
JJ
JJ
К системе Б
12
1
21
2
12
2
21
1
12
21
1
2
12
21
2
1
21
c
J
JJ
с
c
J
JJ
с
JJ
J
JJ
J
JJJ
J
1
1
с
2
с
2
Типа Б
J
с
ссc
э
пБ
21э
К системе типа А
1
12
2
2
12
1
21
21
12
21
1
2
21
2
1
2112
c
c
JJ
c
c
JJ
cc
cc
c
JJ
JJ
4. Выделенная парциальная система преобразуется в систему другого
типа, для которой сохраняется значение парциальной частоты, а
параметры определяются по формулам приведения, указанным в табл.
2.2. При этом две инерционные массы системы типа А
преобразуются в одну эквивалентную (приведенную) инерционную
массу, а инерционная масса системы типа Б преобразуется в две
39

приведенные инерционные массы, которые присоединяются к
соседним в исходной расчетной схеме.
В простейшем случае в результате может оказаться, что все
парциальные частоты лежат за пределами области частот работы
электропривода, тогда механическую систему можно представить в
виде одномассовой эквивалентной системы (рис. 2.5) с параметрами,
включающими внешнее демпфирование:
n
i
n
i
i
n
i
ii
cbbMMJJ
1
зээ
1
ссэ
1
cocoээ
0;0;;;;
. (2.22)
Если будет учтен только один первый резонансный пик на ЛЧХ
исходной многомассовой системы, то упрощенная система оказывается
двухмассовой, если учтены первые два резонансных пика, то
трехмассовой, и т.д. В системах электропривода часто достаточно
ограничиться применением двухмассовой механической системы (рис.
2.6), где учтен зазор и внутреннее и внешнее демпфирование.
Рассмотренная методика преобразования многомассовых механических
систем позволяет в этом случае объективно распределить инерционные
массы исходной системы (рис. 2.1) на две группы
э1
J
и
э2
J
,
соответствующие условию
n
i
i
JJJJ
1
ээ2э1
.
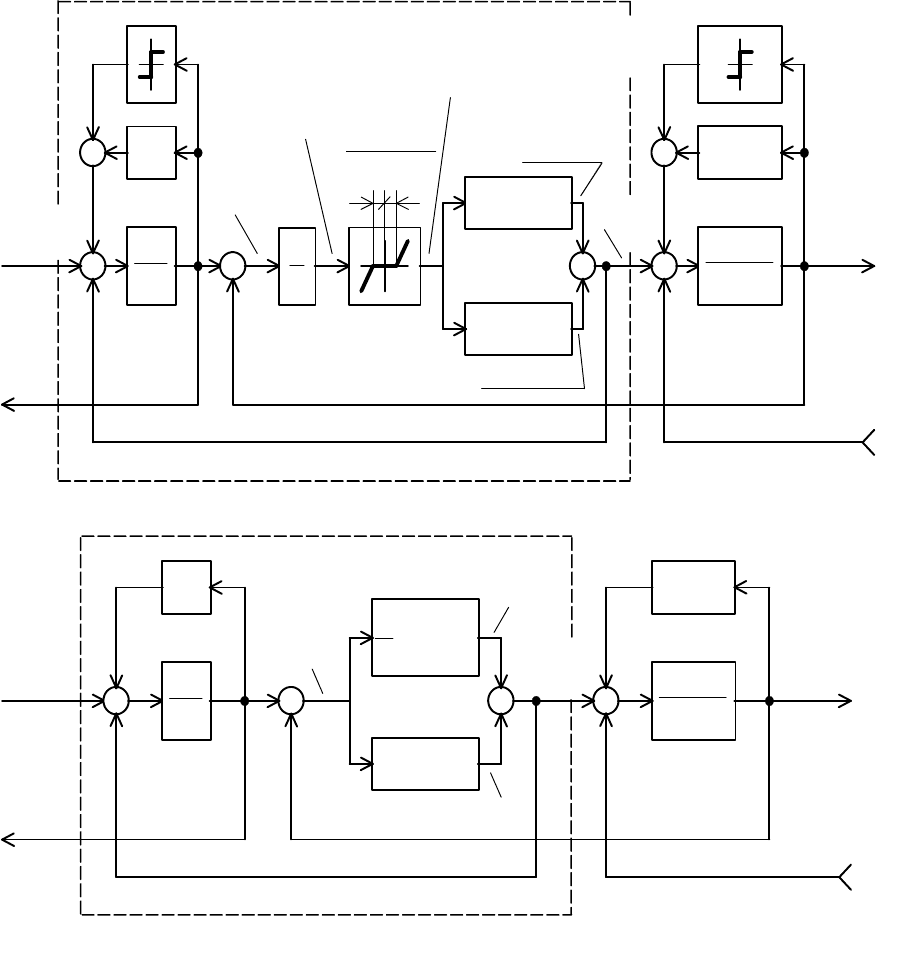
Рис. 2.5. Одномассовая
эквивалентная структурная
схема механической
системы электропривода с
реактивной нагрузкой
40
pJ
1
э
cэ
b
М
(-)
(-)
нагрс
М
сэ
М
соэ
М
1