Удут Л.С., Кояин Н.В., Мальцева О.П. Проектирование и исследование автоматизированных электроприводов. Часть 6 Механическая система электропривода
Подождите немного. Документ загружается.


ременную передачу применяют до 100 кВт, она обеспечивает
наибольшее значение КПД порядка
98.0
[7].
Цепные передачи работают по принципу зацепления, что
обеспечивает постоянство среднего передаточного отношения, но она
характеризуется неравномерностью скорости движения. Цепные
передачи широко используются в транспортирующих машинах при
мощностях до 100 кВт и сравнительно низких линейных скоростях,
обеспечивают наибольшее значение КПД порядка
98.0
[7].
3. СТРУКТУРНЫЕ СХЕМЫ СИЛОВОГО КАНАЛА
ЭЛЕКТРОПРИВОДА
3.1. Структурные схемы однодвигательных электроприводов
Структурные схемы силового канала преобразователь – двигатель
– механизм составляются на основании структурных схем отдельных
его элементов.
Одномассовая механическая система
Структурная схема силового канала электропривода постоянного
тока с одномассовой механической системой (ОМС) приведена на
рис. 3.1, где
м
k
– коэффициент передачи механизма. Силовой канал
электропривода как объект управления представляется в виде
нелинейной системы (при наличии моментов сопротивления типа
сухого трения) с одним управляющим воздействием
уп
U
, с одним
возмущающим воздействием
нагрс
М
и следующими промежуточными и
выходными координатами:
двп
UU ,
– напряжение на зажимах преобразователя и двигателя;
я
i
– ток якорной цепи;
,
– угловая скорость и угол поворота вала двигателя;
)(),(
мммм
LV
– угловая (линейная) скорость и угловое
(линейное) перемещение рабочего органа механизма.
51
я
i
pJ
1
э
эc
b
p
1
м
k
p
1
п
U
дв
U
я
i
мм
V,
мм
L,
нагрс
М
уп
U
П - Д - ОМС
п
U
уп
U
дв
U
дв
P
п
P
(-)
(-)
п
e
дв
e
я
i
(-)
нагрс
М
мм
L,
мм
V,
вал
М
вал
P
сэ
М
соэ
М
дв.эм
М
ОМСЭС
(-)
)(
п
pW
1
1
яц
яц
pТ
R
)1(
пп
pТR
)1(
двдв
pТR
дв
)Ф(
k
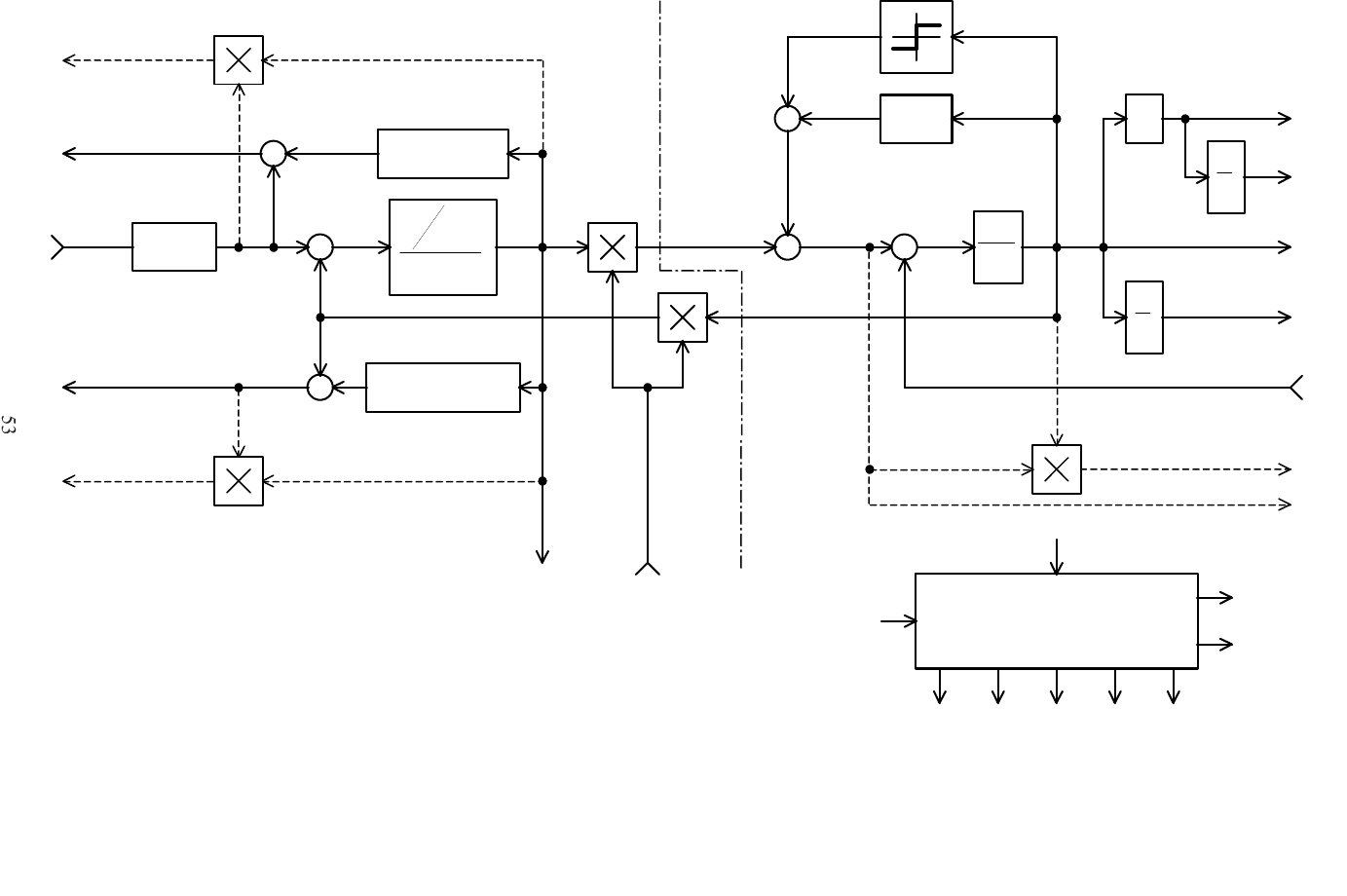
Рис. 3.1. Структурная схема силового канала преобразователь – двигатель постоянного тока – одномассовая
механическая система
53

Координаты системы, обозначенные на рисунке пунктирными
линиями, не могут быть непосредственно измерены на физической
модели, но могут быть получены расчетным путем.
Структурная схема силового канала асинхронного
электропривода в общем случае включает одномассовую механическую
систему, аналогичную приведенной на рис. 3.1 (ОМС), и электрическую
систему, состоящую из преобразователя частоты или напряжения и
асинхронного электродвигателя.
При решении задач анализа и синтеза регулируемых асинхронных
электроприводов обычно применяются модели электродвигателя,
составленные на базе обобщенной электрической машины и
выполненные в неподвижной или вращающейся двухфазной системе
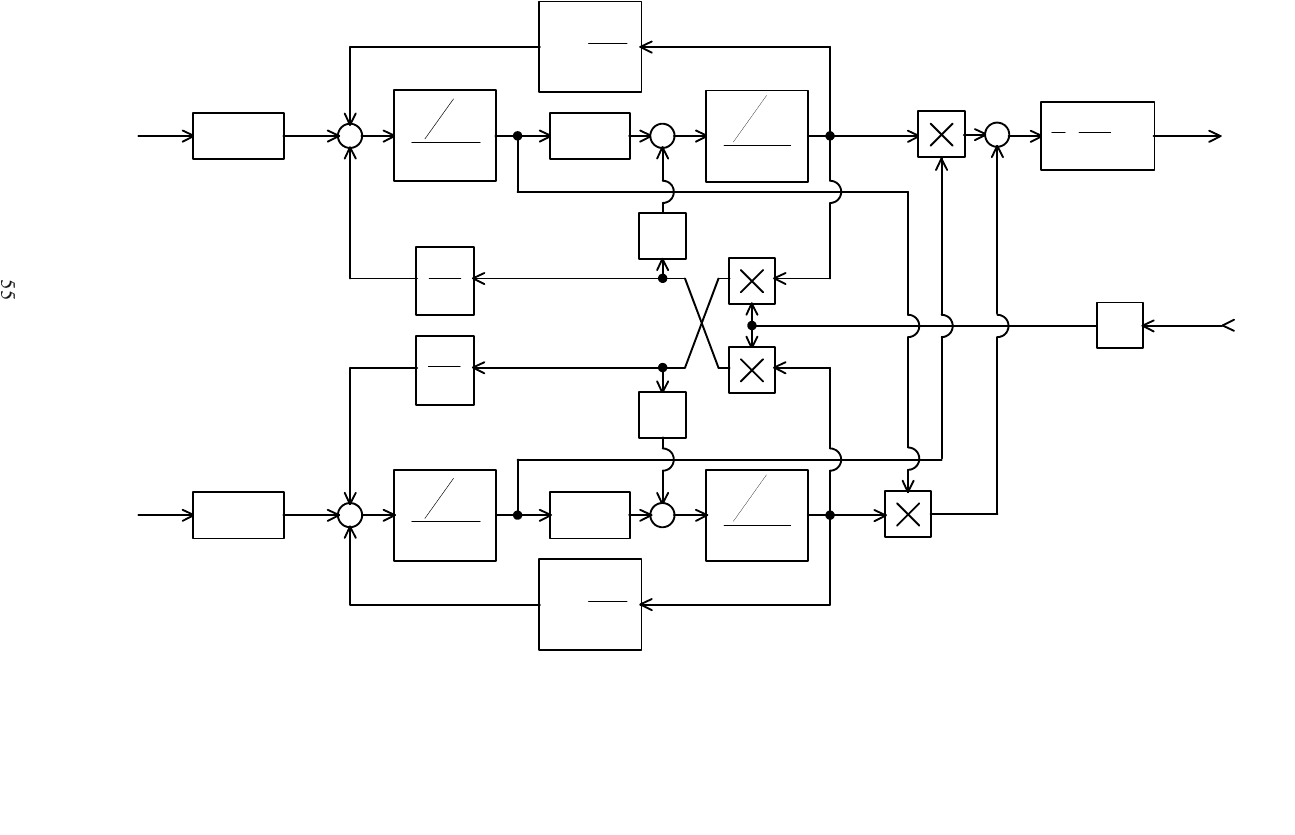
координат (x, y) [25, 26]. На рис. 3.2 приведена структурная схема
силового канала непрерывной линеаризованной системы
преобразователь – асинхронный электродвигатель в неподвижной
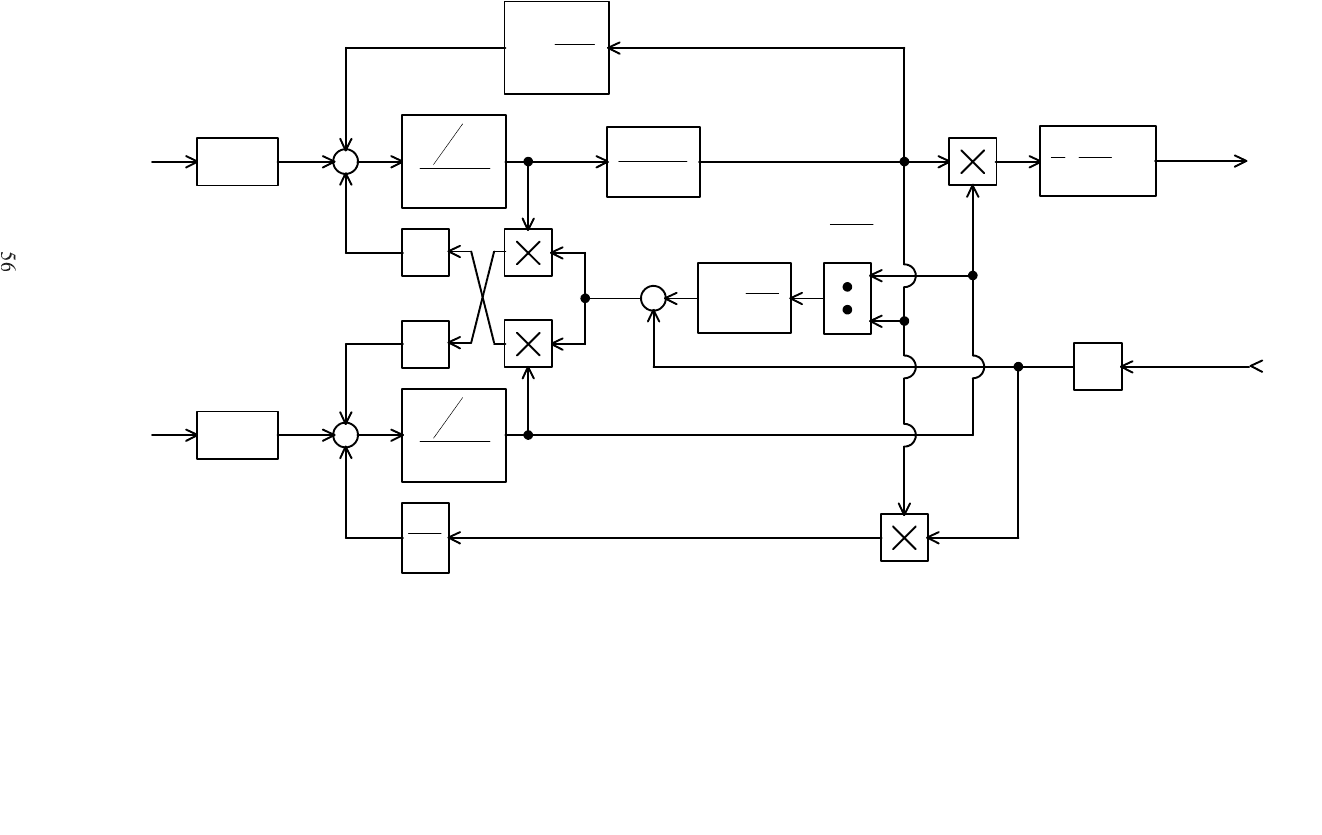
системе координат, а на рис. 3.3 – во вращающейся со скоростью
k
системе координат, ориентированной по результирующему вектору
потокосцепления ротора. Структурная схема рис. 3.2 описывает
процессы, происходящие в машине переменного тока, в которой
действуют переменные величины напряжений, токов, потокосцеплений
синусоидальной формы, и используется, главным образом, для анализа
систем скалярного управления. Структурная схема рис. 3.3 с
ориентацией по вектору потокосцепления ротора используется в
качестве объекта систем векторного управления, все переменные и
входные воздействия представляют собой сигналы постоянного тока.
Входными величинами структурных схем рис. 3.2 и рис. 3.3
являются составляющие напряжения управления преобразователя
x
U
уп
,
y
U
уп
и угловая скорость двигателя
, выходной величиной –
электромагнитный момент двигателя М.
Структурные схемы рис. 3.2 и 3.3 характеризуются следующими
промежуточными координатами:
x
U
1
,
y
U
1
,
x
I
1
,
y
I
1
,
x2
,
y2
–
составляющие напряжения, тока статора и потокосцепления ротора в
ортогональной системе координат x и y.
Принятые обозначения:
m
L
– результирующая индуктивность, обусловленная магнитным
потоком в воздушном зазоре, создаваемым суммарным действием
полюсов статора, Гн;
54
(-)
х
U
1
1
1
рТ
R
э
э
х
I
1
m
LR
'
2
1
1
2
'
2
pT
R
2
2
'
2
L
L
R
m
x2
p
m
z
L
L
2
2
3
М
2
L
2
L
1
1
2
'
2
pT
R
(-)
p
z
m
LR
'
2
1
1
рТ
R
э
э
y
I
1
2
L
L
m
2
L
L
m
(-)
y
U
1
2
2
'
2
L
L
R
m
y2
)(
п
pW
y
x
U
уп
)(
п
pW
x
y
U
уп
1
Рис. 3.2. Структурная схема электрической системы силового канала преобразователь – асинхронный
электродвигатель в неподвижной системе координат
55
х
U
1
1
1
рТ
R
э
э
х
I
1
2
2
'
2
L
L
R
m
1
2
pT
L
m
к
1
1
рТ
R
э
э
y
I
1
(-)
y
U
1
2
'
2
L
L
R
m
x
y
I
2
1
2
L
L
m
(-)
p
m
z
L
L
2
2
3
М
p
z
x2
x
U
уп
)(
п
pW
y
)(
п
pW
x
y
U
уп
1
1
L
1
L
Рис. 3.3. Структурная схема электрической системы силового канала системы преобразователь – асинхронный
электродвигатель во вращающейся двухфазной системе координат, ориентированной по результирующему вектору
потокосцепления ротора
56
m
LLL
11
– эквивалентная индуктивность обмотки статора, Гн;
m
LLL
'
22
– эквивалентная индуктивность обмотки ротора, Гн;
1
L
,
'
2
L
– индуктивность обмотки статора и приведенная
индуктивность обмотки ротора, обусловленные потоком рассеяния, Гн;
1
R
,
'
2
R
– активное сопротивление обмотки статора и приведенное
сопротивление обмотки ротора, Ом;
'
21
2
1
LL
L
m
– коэффициент рассеяния;
p
z
– число пар полюсов двигателя;
.;;
'
2
2
2
э
1
э
2
2
2
'
21э
R
L
T
R
L
T
L
L
RRR
m
Параметры структурных схем рис. 3.2 и 3.3 могут быть найдены в
справочной литературе [27] или определены по методике, изложенной в
[28].
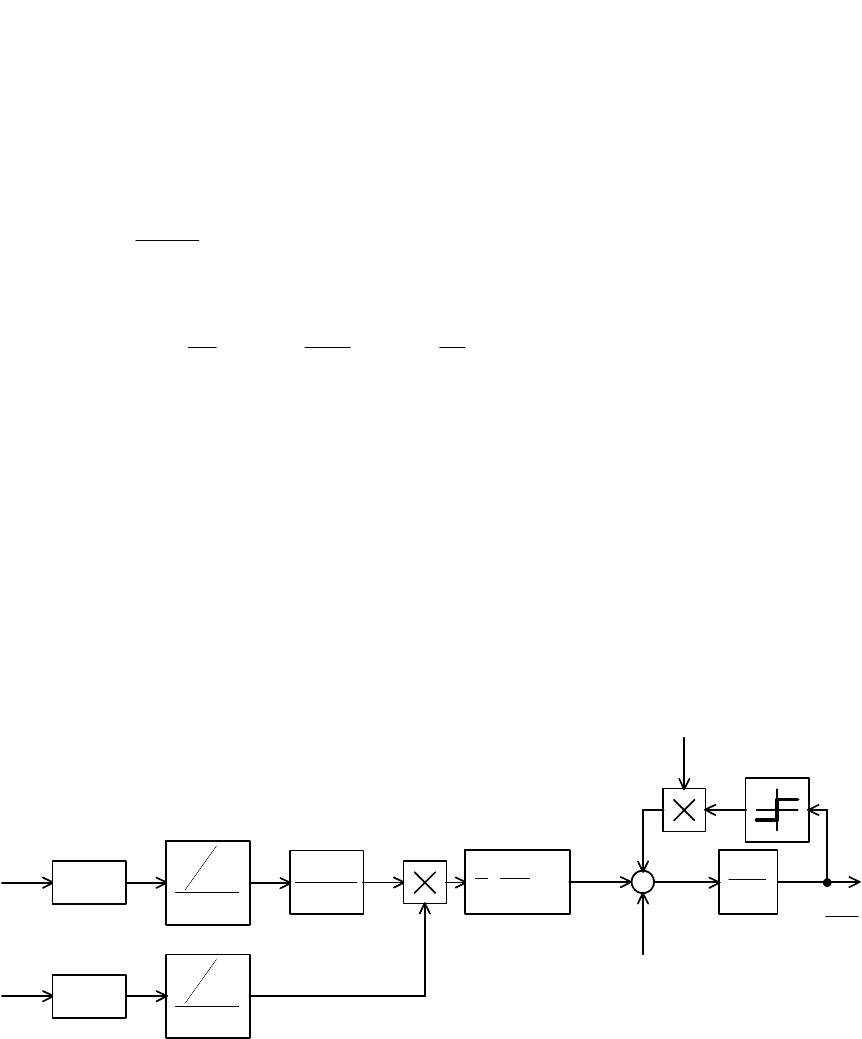
На структурных схемах рис. 3.2 и рис. 3.3 присутствуют
внутренние обратные связи, в том числе нелинейные перекрестные.
Если они скомпенсированы или не учитываются, то структурная схема
силового канала преобразователь – асинхронный электродвигатель –
одномассовая механическая система во вращающейся двухфазной
системе координат приводится к виду, показанному на рис. 3.4.
х
U
1
х
I
1
1
2
pT
L
m
x2
p
m
z
L
L
2
2
3
М
1
1
рТ
R
э
э
1
1
рТ
R
э
э
y
I
1
y
U
1
СА
М
(-)
СР
М
1
с
рад
(-)
рJ
э
1
x
U
уп
y
U
уп
)(
п
pW
y
)(
п
pW
x
sign
c
M
Рис. 3.4. Структурная схема силового канала системы преобразователь –
асинхронный электродвигатель – одномассвая механическая система во
вращающейся двухфазной системе координат, ориентированной по
результирующему вектору потокосцепления ротора, при компенсации
внутренних обратных связей
Двухмассовая механическая система
57

Кинематические схемы механической части электроприводов
промышленных агрегатов могут быть весьма сложными, состоящими из
нескольких инерционных масс, связанных муфтами, редукторами,
валами, цепными и ременными передачами. При этом возможно
последовательное, параллельное и смешанное соединение
кинематических звеньев механических передач. Для математического
описания таких сложных систем используются расчетные схемы, в
которые входит несколько приведенных сосредоточенных инерционных
масс
i
J
и соединяющих их безынерционных упругих механических
связей, имеющих приведенные значения коэффициентов жесткости
i
с
,
коэффициентов внешнего и внутреннего демпфирования
ii
bb
вc
,
и
зазора
iз
.
На практике многомассовую упругую механическую систему
однодвигательных приводов часто удается привести к двухмассовой.
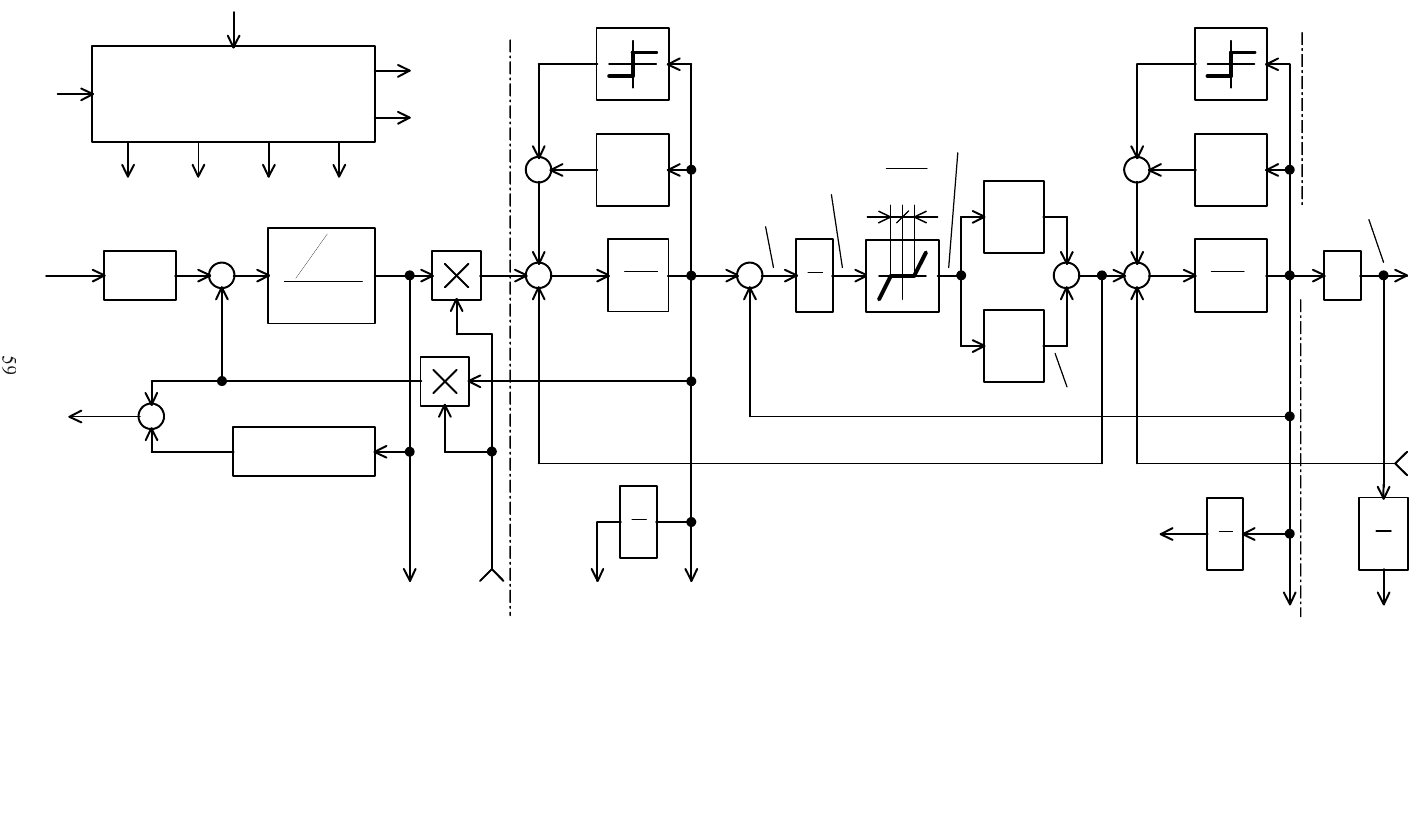
Структурная схема силового канала системы преобразователь –
двигатель постоянного тока – двухмассовая упругая механическая
система (ДМС) приведена на рис. 3.5. В этом случае силовой канал как
объект управления представляется в виде нелинейной системы (при
наличии зазора и моментов сопротивления типа сухого трения),
имеющей одно управляющее воздействие
уп
U
, одно возмущающее
воздействие
нагрс
М
и следующие промежуточные и выходные
координаты:
ядв
iU ,
– напряжение и ток двигателя;
11
,
– угловая скорость и угол поворота вала двигателя (первой
массы);
)(),(
мммм
LV
– угловая (линейная) скорость и угловое
(линейное) перемещение рабочего органа механизма.
Структурная схема силового канала системы преобразователь –
асинхронный электродвигатель – двухмассовая упругая механическая
система (ДМС) может быть составлена на основании структурной
схемы ДМС, приведенной на рис. 3.5, и показанных на рис. 3.2 и 3.3
структурных схем электрической части.
58
W p
п
( )
U
уп
e
п
i
я
U
дв
i
я
e
дв
(-)
1
1
J p
b
с1
M
c1
(-)
1
12
1
p
1
2
J
p
b
с2
(-)
2
(-) (-) (-)
M
1
2
ДМСЭС
M
12
M
снагр
12
с
в12
pb
1
p
м
k
1
p
1
p
M
cо1
1дв
kФ
1
12
2
з
у12
M
у12
M
в12
2
2
M
c2
M
cо2
дв
U
я
i
мм
V,
мм
L,
нагрс
М
уп
U
П - Д - ДМС
1 1
мм
V,
мм
L,
1
1
яц
яц
pT
R
)1(
двдв
pTR
Рис. 3.5. Структурная схема силового канала преобразователь–двигатель постоянного тока–двухмассовая
механическая система
59

Многомассовая упругая механическая система при последовательном
соединении звеньев кинематической цепи
Если по каким-либо причинам (подраздел 2.3) оказывается
невозможным преобразование исходной многомассовой механической
системы с целью уменьшения числа инерционных масс, то ее
приходится рассматривать в составе электропривода как
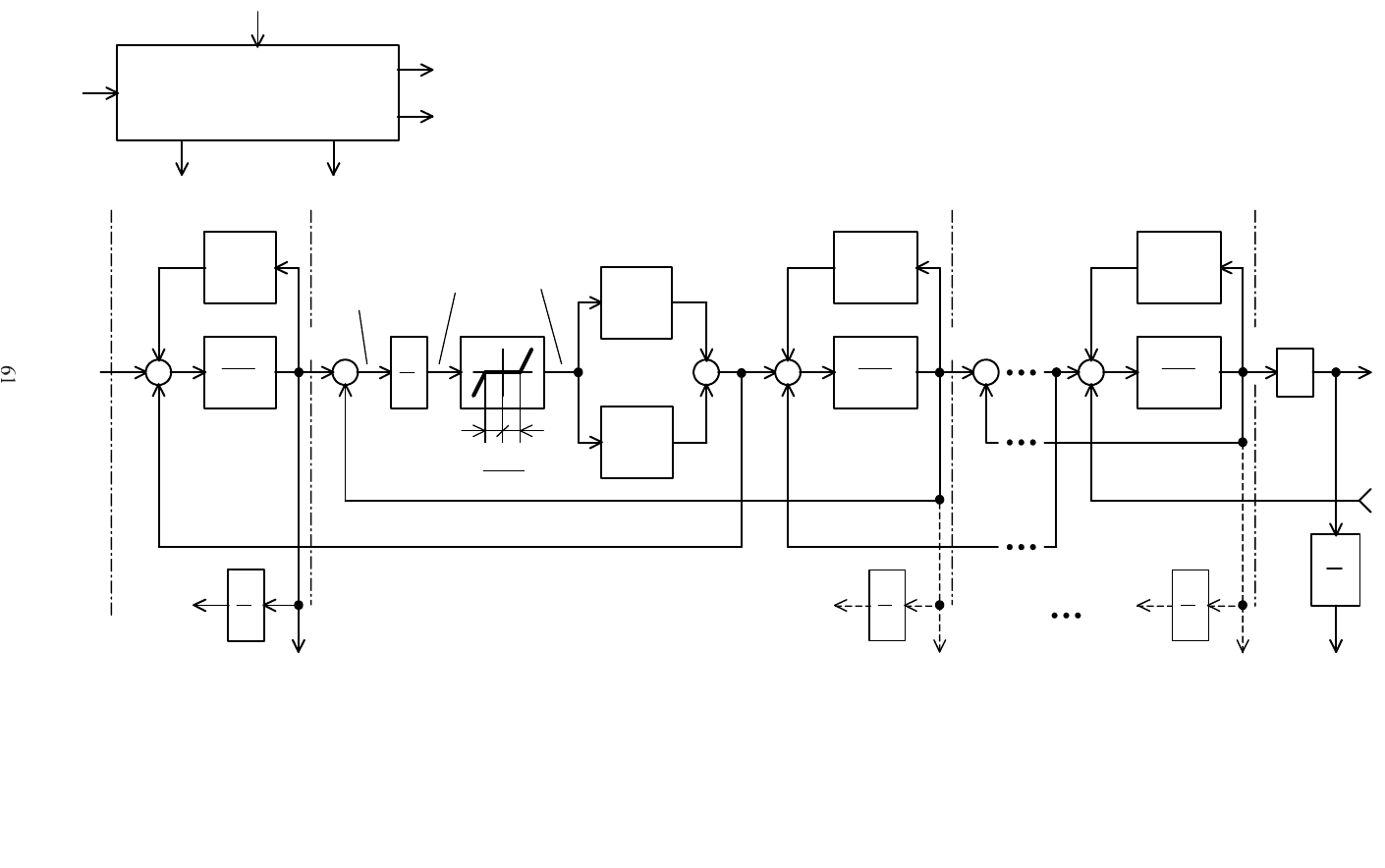
многомассовую. Структурная схема многомассовой упругой
механической системы (ММС) последовательного типа приведена на
рис. 3.6. Базовым элементом многомассовой упругой механической
системы является структурный модуль двухмассовой механической
системы (рис. 2.3). Многомассовая механическая система как элемент
силового канала представляет собой нелинейную систему (при наличии
зазора и моментов сопротивления типа сухого трения), имеющую одно
управляющее
M
, одно возмущающее
нагрс
М
воздействие и следующие
контролируемые промежуточные и выходные параметры:
)(),(
мммм
LV
– угловая (линейная) скорость и угловое (линейное)
перемещение исполнительного органа механизма.
Внутренние механические возмущения передач
Погрешности изготовления элементов передач – эксцентриситеты,
систематические погрешности изготовления зубьев, накопленные
ошибки зубчатых колес и др., являются причиной периодических
изменений мгновенного значения передаточного числа i с угловой
частотой, равной скорости вращения соответствующего вала [1]. Если
пульсации передаточного числа представить как гармонические, то в
общем виде можно записать
n
k
kkk
tiii
1
0
sin1
, (3.1)
где n – общее число валов и зацеплений кинематической цепи;
k
– начальный угол k-й составляющей.
На рис. 3.7 приведена структурная схема двухмассовой
механической системы, в которой учтено изменение передаточного
числа в соответствии с выражением (3.1), где коэффициент
k
a
характеризует соотношение угловой частоты k-й составляющей
пульсации передаточного числа и угловой скорости
2
. В результате
неравномерности хода передачи привод при отсутствии каких-либо
внешних сил испытывает дополнительную нагрузку
iM
12
,
изменяющуюся с частотой изменения передаточного числа.
60
1
1
J p
M
c1
1
p
12
M
f
1 1
( )
(-)
p b
12
1
2
J p
f
2 2
( )
(-)
1
n
J p
(-)
(-)
1
(-)
12
у12
M
у12
M
в12
M
12
(-)
M
c2
2
M
cn
3
M
n n
(
) 1
n
M
c нагр
)f
n n
(
(-)
1 2
3 n
12
с
(-)
2
з
м
k
1
p
1
p
1
2
1
2
1
p
n
n
мм
V,
мм
L,
нагрс
М
M
ММС
1 1
мм
V,
1
p
мм
L,
12
М
23
М
Рис. 3.6. Структурная схема многомассовой упругой механической системы
61