Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


MECHANICAL SYSTEMS, CLASSICAL MODELS
Analogously, the kinetic energy is given by
()
2
222
11 1 1 1
11 1 1
22 2 2
nn n n n
ii i i ii ii i
ii i i i
Tmv m mr m m
== = = =
′′ ′ ′ ′
==+=+⋅+
∑∑ ∑ ∑ ∑
rr
ρρρ,
so that we may write
() 2
1
2
C
TT M
′′
=+
ρ
,
(11.2.4)
()C
T being the kinetic energy of the system in relative motion (with respect to the mass
centre); we thus state
Theorem 11.2.2 (S. Koenig). The kinetic energy of a discrete mechanical system with
respect to a fixed frame of reference is equal to the sum of the kinetic energy of the
same system with respect to a Koenig frame of reference and the kinetic energy of the
mass centre at which the whole mass of the mechanical system is concentrated, with
respect to the fixed frame.
The elementary work of the given and constraint, external and internal forces is
given by
int
int
111
dd d d ( )d '( )d
nnn
ii i i
R R ik ik
iik
WW W W
===
′′ ′ ′ ′ ′
+++ =+⋅+ +⋅
∑∑∑
FR r F R r
111
()(dd) '( )(dd)
nnn
ii i i
ik ik
iik
===
′′
= +⋅+ + + ⋅+
∑∑∑
FR r F R r
ρρ
;
hence,
() () ()
()
int
int
int
int
dddddddd()d
CCC
C
RR
RR
WWWW WWWW
′′ ′ ′ ′
+++=+++++⋅RR
ρ
(11.2.5)
and we can state (we denote by upper index the elementary work with respect to a
Koenig frame of reference)
Theorem 11.2.3 (of Koenig type). The elementary work of the given and constraint,
external and internal forces which act upon a discrete mechanical system, with respect
to a fixed frame of reference, is equal to the sum of the elementary work of the same
forces, with respect to a Koenig frame, and the elementary work of the given and
constraint external forces, considered to be applied at the mass centre, with respect to
the fixed frame.
From (11.2.5) we notice that we can write
()
dd d
C
C
WW t
′′
=+⋅Rv
,
()
dd d
C
RC
R
WW t
′′
=+⋅Rv
,
()
int
int
dd
C
WW
′
=
,
()
int
int
dd
C
R
R
WW
′
= .
(11.2.5')
Hence, the elementary work of the external (given and constraint) forces is not the same
with respect to an inertial (fixed) frame of reference and to a non-inertial (movable)
Koenig frame, its variation depending on the resultant of the external (given and
52

constraint) forces; this elementary work (e.g., of the given external forces) remains
invariant if and only if the scalar product
0
C
′
⋅=
Rv , hence if the resultant =R0 or
if
C
′
=
v0 (the centre of mass is rigidly linked – at rest – with respect to the fixed
frame) or if
C
′
⊥
vR (the resultant of the given external forces is contained, at any
moment, in a plane normal to the trajectory of the centre of mass). In case of catastatic
external constraints, the elementary work of the constraint external forces with respect
to an inertial frame (in the absolute motion) vanishes (
d0
R
W
′
= ); from (11.2.5') it
results that the elementary work with respect to a non-inertial Koenig frame (in the
relative motion) is, in general, non-zero. This elementary work remains invariant only if
0
C
′
⋅=
Rv (which has an analogous mechanical interpretation as above). In exchange,
the elementary work of the internal forces (for which the resultant vanishes) remains
always invariant by passing from an inertial frame to a non-inertial Koenig frame.
We notice that the Theorem 3.1.4 (Huygens-Steiner) is of the same type as Koenig’s
theorems. As well, the formulae (3.1.9) and (11.2.2) are of the same type, the
corresponding quantities being equal to zero with respect to a Koenig frame.
11.2.1.2 General Theorems with Respect to a Koenig Frame. Conservation Theorems
Passing from a given frame of reference
′
R to a Koenig frame R, the sum of the
given and constraint external forces
1
()
n
ii
i
=
′′
+= + =+
∑
RR FR RR
(11.2.6)
remains invariant; assuming that the frame
′
R is inertial and using the formula
(11.2.2), the Theorem 11.1.21 of the momentum allows to find again the Theorem
11.1.22 of motion of the centre of mass.
As well, the resultant moment of the given and constraint external forces is
expressed in the form
11
()()()
nn
iii i ii
OO
ii
′′
==
′′ ′ ′
+ = ×+ = +×+
∑∑
MM rFR r FRρ
11
() ()
nn
iii ii
ii
==
′
=×++× +
∑∑
rFR FRρ ,
so that
1
()
n
ii
CC
OO
i
′′
=
′′ ′
+=++× +
∑
MM MM FRρ ,
(11.2.6')
hence a formula of the form (2.2.27) (a result of the same form as the theorems of
Koenig type). In this case, assuming – further – that the frame
′
R is inertial and
taking into account the Theorem 11.2.1, the Theorem 11.1.23 of the moment of
momentum leads to (without distinction between the absolute and the relative
derivatives, because
= 0ω )
11 Dynamics of Discrete Mechanical Systems
53

MECHANICAL SYSTEMS, CLASSICAL MODELS
()
1
() () ( )
n
C
ii
CC
O
C
i
MM
′
=
′′′′′ ′
=+× +× =++× +
∑
KK MM FRρρρρ ρ ;
using the theorem of motion of the centre of mass, we obtain, finally,
()C
CC
C
=+
KMM
,
(11.2.7)
so that we state
Theorem 11.2.4 (S. Koenig). The theorem of moment of momentum remains invariant
by passing from an inertial (fixed) frame of reference to a non-inertial (movable)
Koenig frame.
Taking into account the Theorems 11.2.2 and 11.2.3 and assuming that the frame
′
R is inertial, the Theorem 11.1.25 of the kinetic energy allows to write (we have, as
well,
() ()
d/d /
CC
TtTt=∂ ∂ ; an upper index specifies the kinetic energy with
respect to a Koenig frame)
() ()
dd dd d
CC
TT M T M
′′′′′
=+⋅ +⋅
ρρ
=
ρρ
() () ()
()
int
int
1
dddd ()d
n
CCC
C
ii
RR
i
WWWW
=
⎡⎤
′
=+++++⋅
⎢⎥
⎣⎦
∑
FR
ρ
,
so that (we use, further, the theorem of motion of the centre of mass)
() () ()
() ()
int
int
ddddd
CCC
CC
RR
TWWWW=+++,
(11.2.8)
and we can state
Theorem 11.2.5 (S. Koenig). The theorem of kinetic energy remains invariant by
passing from an inertial (fixed) frame of reference to a non-inertial (movable) Koenig
frame.
The Theorems 11.2.4 and 11.2.5 represent a vector and a scalar condition,
respectively, hence four necessary scalar conditions which must be verified in the
motion of a discrete mechanical system
S with respect to a frame of Koenig; these
conditions are not independent of the seven conditions (the three general theorems),
written with respect to an inertial frame. Obviously, in this case too, all considerations
made for the motion with respect to an inertial frame hold. We can thus obtain a vector
first integral (a conservation theorem of moment of momentum) and a scalar first
integral (a conservation theorem of mechanical energy) in the motion with respect to
the centre of mass, hence four scalar first integrals.
We notice that we can state a theorem of areal velocities and a theorem of areas with
respect to a Koenig frame; as well, one can write a formula of the form (11.1.32''). One
can thus explain the jump of a swimmer from the jumping board (to attain the water in
vertical position, he is varying – by adequate motions – his moment of inertia, hence his
angular velocity with respect to a horizontal axis – the axis of a Koenig frame – which
passes through his centre of mass), the jump of the skier from the spring-board (to reach
the ground in the desired position), the jump of a gymnast on the ground, the fact that a
cat attains the ground on its feet, anyhow it falls, the motions which instinctively we
54
make by the hands to straighten ourselves in case of a wrong step etc.; in all these cases,
the weight of the considered body is a force passing through the mass centre. We
mention also the manual manoeuvres made by the cosmonauts to direct conveniently
the space vehicles; in this case, the Newtonian force of attraction passes also through
the mass centre of the cabin. As a matter of fact, a general problem of the type
schematized in Fig.11.2 can be considered with respect to a Koenig frame too.
If a mechanical system
S is subjected to the action of a uniform gravitational field
(e.g., a heavy bar, homogeneous or not, launched in the vicinity of the Earth, neglecting
the resistance of the air), then its centre of mass describes a parabola; it remains to
study the relative motion of the system
S (with respect to its mass centre). We can
write a conservation theorem of the moment of momentum (
()C
C
=KC); assuming that
the system
S is non-deformable, a relation of the form (11.1.32'') with respect to a
fixed axis through the centre of mass, along the direction of the constant
C, takes place,
this system having a motion of rotation about the respective axis (in particular, the bar,
considered to be rigid, is rotating in the plane of maximum of areas, which is normal to
C and which passes through the centre of mass). Indeed, if the direction of the bar is of
unit vector
u, then the velocity of each point of it is along that unit vector, so that
I ×=
uu C, where I is the moment of inertia with respect to the fixed axis, resulting
0⋅=Cu . If, corresponding to the initial conditions, we have =C0, then the
mechanical system
S has a motion of translation with respect to the inertial frame,
being at rest with respect to a Koenig frame. We notice that the external work of the
gravity forces with respect to a Koenig frame vanishes
() () ()
()
333
111
dddd0
nnn
iii
C
iii
iii
Wmgxgmxgmx
===
=− =− =− =
∑∑∑
,
assuming that the
3
Cx
-axis is along the ascendent vertical; in this case, the relation
(11.2.8) reads (the discrete mechanical system
S being free, we have
() ()
int
dd0
CC
RR
WW==)
()
()
int
dd
C
C
TW= .
(11.2.8')
If the mechanical system is non-deformable, it results
()
const
C
T = , hence a
conservation theorem of the kinetic energy with respect to a Koenig frame.
Assuming that the solar system is isolated, it results that its moment of momentum
with respect to the mass centre, situated in the neighbourhood of the mass centre of the
Sun, is constant in time (
()C
C
=KC
); the plane of maximum of areas, normal to the
constant
C, is an invariable plane for the motions in the interior of this system. Laplace
determined this plane, calculating the components of the moment of momentum
()C
C
K
.
He modelled the planets as particles reduced to their centres of mass; Poinsot completed
this computation, introducing also the influence – in fact, negligible – of the terms
provided by the proper rotation of each planet. These conclusions remain valid even if
11 Dynamics of Discrete Mechanical Systems
55
MECHANICAL SYSTEMS, CLASSICAL MODELS
the influences external to the solar system are not neglected. Indeed, the distances from
other stars to various particles which form the solar system are very great so that the
external forces of Newtonian attraction which act upon these particles and are in direct
proportion to their masses form, with a good approximation, a system of parallel forces,
their resultant moment with respect to the centre of mass vanishing.
11.2.1.3 Problem of n Particles
Returning to the problem of
n particles (see Sect. 1.2.8 too), we will consider the
motion of a discrete mechanical system with respect to the mass centre
C. For 2n = ,
the velocity of the centre of mass with respect to an inertial frame of reference is given
by
00
C
Mm
Mm
Mm Mm Mm
′′
′′′
+
+
′
== =
++ +
Vv
HVv
v
,
where
′
V
is the velocity of the Sun S, of mass M, while
′
v
is the velocity of a planet
P, of mass m, with respect to the same frame; taking into account the conservation
theorem of momentum, we have put in evidence the velocities at the initial moment. In
this case, the velocities of the two particles with respect to a Koenig frame are given by
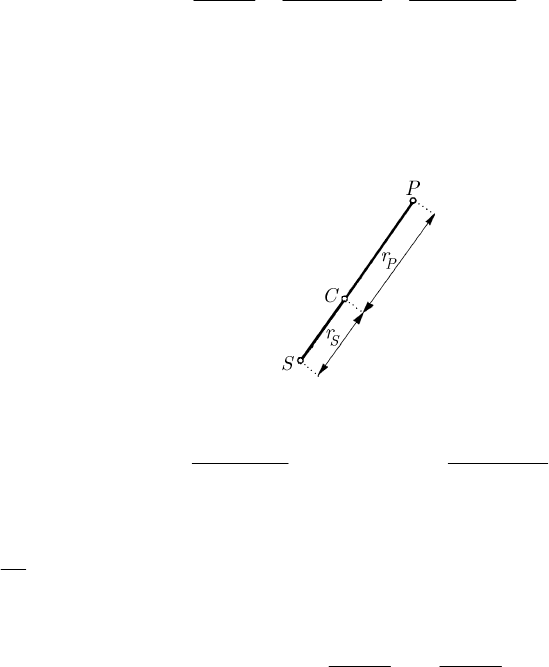
Fig. 11.7 Problem of two particles
()
C
m
Mm
′′
−
′′
=− =
+
Vv
VV v
,
()
C
M
Mm
′′
−
′′
=− =
+
vV
vv v
;
(11.2.9)
these velocities have opposite directions at any moment (inclusive at the initial
moment). We notice that the mass centre
C is on the segment of a line SP of length
SP r= , at the distances
S
r and
P
r from the centres of the particles S and P,
respectively, so that (Fig. 11.7)
SP
Mr mr= ,
SP S P
Mm Mm
rr r r r
mM
++
+== =
.
(11.2.9')
The equation of relative motion of the particle P reads
56

3
222
vers
()
PP P
P
mM mM
mf f
rMmr
=− =−
+
rr r;
hence, the particle
P moves with respect to the Koenig frame as if it would be
gravitationally attracted by the mass centre
C, at which would be an attractive mass
equal to
32 2
/( ) /(1 / )MMm M mM+= + , describing a conic
()C
P
C after the law
of areas, the centre
C being at one of the foci. The genus of the conic is specified by the
relations
23
02
00
22
()2
() ()
P
MM
rf
Mm Mm
−
++
Vv
P ,
where we have put in evidence the position of the particle
P at the initial moment;
taking into account (11.2.9') and the relation
SP
−=−vv Vv, we find again the
conditions which specified the genus of the conics
P
C and
S
C in Sect. 1.2.8.
Analogously, one can also show that the particle
S describes a conic
()C
S
C
too, after the
law of areas, with respect to the mass centre, that one being at one of the foci, its genus
being given by the same relations. These conics are situated in the plane determined by
the straight line
00
PS and by the vector −Vv, being thus coplanar with the conics
P
C and
S
C . Taking into account the first relation (11.2.9'), we notice that the two
conics
()C
P
C and
()C
S
C are obtained one of the other by a transformation of similitude
(the ratio
/const
SP
rr= ), the centre of similitude being C. We notice that the areal
velocity is constant (
/2
PP
=× =rv cΩ , /2
SS
=× =rV CΩ ) in the motion of
each particle; the plane in which are both trajectories is normal to a fixed direction,
specified by
&cC, and is – in fact – the plane of the maximum of areas. Finally, the
two particles
S and P move so that their mass centre C describes uniformly a fixed
straight line, while the line
SP is rotating about C in a plane of fixed orientation; the
particles
S and P describe conics in this plane, obtained one of the other by similitude
and having one of the foci at
C.
The period of revolution of a particle
P in motion with respect to a Koenig frame is
given by
(
)
(
)
2211
aM m a m m
Ta a k
f
fM M M
MM
ππ
+
==+=+
, constk = .
(11.2.9'')
Let us consider, at the atomic level, the motion of an electron about the nucleus; in case
of an atom of hydrogen we have
/1/1850mM= , while in case of an atom of ionized
11 Dynamics of Discrete Mechanical Systems
57

MECHANICAL SYSTEMS, CLASSICAL MODELS
helium
/1/7400mM= . Observing that the wave length is in direct proportion to the
period of revolution
T, we can write for the corresponding wave lengths
(
)
(
)
He
H
11
11
1111
7400 1850
2468 2500
λ
λ
=+ + =− ≅− ;
experimentally, one obtains
He
6560.2 Åλ = and
H
6562.8 Åλ = , so that
He H
/λλ
6560.2/ 6562.8 1 1/2524 1 1/2500=≅−≅−, this result being in good concordance
with the theoretical one.
If
3n > , then one can follow the considerations in Sect. 1.2.8.
11.2.2 Motion of a Discrete Mechanical System with Respect to
an Arbitrary Non-inertial Frame of Reference
The results obtained in Sects. 11.2.1.1 and 11.2.1.2 will be generalized, assuming that
the movable frame of reference
R has a pole other than the centre of mass of the free
discrete mechanical system
S or/and assuming that the movable frame has a motion of
rotation (
≠ 0ω ) with respect to the fixed frame
′
R . The quantities calculated with
respect to the inertial frame
′
R will be denoted by “prime”, while to the quantities
calculated with respect to the non-inertial frame
R will not be given such a
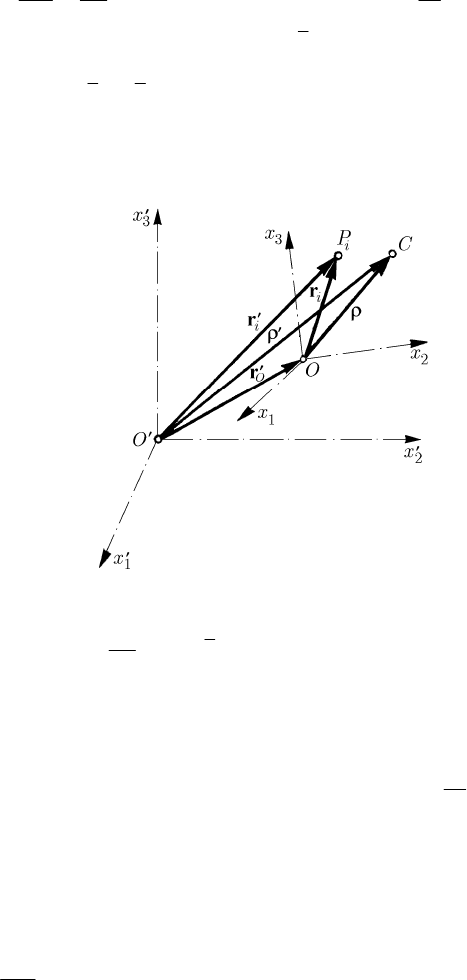
specification (Fig. 11.8).
11.2.2.1 Momentum and Moment of Momentum with Respect to an Arbitrary
Frame of Reference
We can write
ii
O
′′
=+rr r
,
1,2,...,in=
,
(11.2.10)
for a particle
i
P , wherefrom, differentiating with respect to the frame of reference
′
R ,
we have
iii
O
′′
=++×vv v rω
, 1,2,...,in= .
(11.2.10')
Multiplying by the mass
i
m and summing for all the particles of the system S, we
obtain
()
O
M
′′
=+ +×HH v ω
ρ
,
(11.2.11)
ρ being the position vector of the mass centre in the frame R ; we state thus
Theorem 11.2.6 (V. Vâlcovici). The momentum of a discrete mechanical system with
respect to a fixed frame of reference is equal to the sum of the momentum of this system
with respect to an arbitrary frame and the momentum of the mass centre of the system,
considered to be at rest with respect to the latter frame, assuming that its whole mass is
concentrated at this centre, with respect to the fixed frame.
58
Applying the theorem of momentum with respect to the inertial frame and the
formula (A.2.37), we can write
d
d
O
MM M
tt t
′
∂∂
′′
==+×+ +×+×
∂∂
HH
AHa
ρ
ωωρω
()M
′′
+××=+RRωωρ ,
(11.2.11')
where
′
=RR
and
′
=RR
are the resultants of the given and constraint external
forces, respectively; both resultants are invariant by a change of frame. We introduce
the dynamic resultant (11.1.66) with respect to the non-inertial frame
R
(
/Mt=∂∂H
ρ
)
Fig. 11.8 Motion with respect to an arbitrary non-inertial frame of reference
() ()CC
t
C
t
∂
==++ +
∂
H
ARRFF
,
(11.2.12)
where the complementary forces (the transportation force and the Coriolis force) are
given by
[]
()
()
C
O
t
M
′
=− + × + × ×
Faω
ρ
ωω
ρ
,
()
2
C
C
M
t
∂
=− ×
∂
F
ρ
ω ,
(11.2.12')
corresponding to the centre of mass (which plays thus an important rôle), where we
consider that the whole mass of the mechanical system
S is concentrated. One can
obtain this result starting from the equations of motion written for a non-inertial frame
(in relative motion)
() ()ii
i
iiiii
t
C
mm
t
∂
==+++
∂
H
rFRF F
, 1,2,...,in= ,
(11.2.13)
11 Dynamics of Discrete Mechanical Systems
59
MECHANICAL SYSTEMS, CLASSICAL MODELS
where
[]
()
()
i
ii i
O
t
m
′
=− + × + × ×
Far rωωω,
()
2
i
ii
C
m=− ×Fvω
,
(11.2.13')
and summing for all the particles of the mechanical system
S.
In the particular case in which the frame
R does not rotate (moves with the axes
parallel to themselves) we have
= 0ω and it results
O
M
′′
=+HH v,
t
O
M
′
=−Fa,
C
=F0;
(11.2.11'')
as well, in the case in which the frame
R has its pole at the centre of mass
(
OC≡ , = 0
ρ
), we can write
OC
MM
′′ ′
==Hv v,
t
O
M
′
=−Fa,
C
=F0,
(11.2.11''')
even if
≠ 0ω .
Taking into account the relation (11.2.10'), we have
COC
′′
=++×vvvω
ρ
,
(11.2.14)
wherefrom we obtain
()2
COC C
′′
= + +×+× × + ×
aaa vω
ρ
ωω
ρ
ω ;
(11.2.14')
observing that
/
C
tM∂∂=Ha, the equation (11.2.12), (11.2.12') takes the remarkable
form
C
M
′
=+aRR,
(11.2.15)
corresponding to the motion of the centre of mass.
A vector product at the left of the relation (11.2.10') by
i
′
r
leads to
()( )
ii i i i i
OO OOO
′′ ′ ′ ′ ′ ′
×= +× ++× =× +×rv r r v v r r v r vω
() ()
iiiiii
OO
′′
+× × − ×+× +× ×rrvrrvrrωω
,
where we took into account (11.2.10); multiplying by
i
m and summing for all the
particles of the discrete mechanical system
S, it results
() ()
OO C O
O
MM
′
′′′ ′
=+× +×
KKr v vρ
,
(11.2.16)
where we considered (11.2.14) and have introduced a quantity of the nature of a
moment of momentum
11
d
()
d
nn
i
ii i i ii
O
ii
mm
t
==
=×+×=×
∑∑
r
Krvrrω
.
(11.2.16')
60
We notice that
O
K
does not represent the moment of momentum of the discrete
mechanical system
S with respect to the pole O of the non-inertial frame R, taken
with respect to the inertial frame
′
R . But
O
K represents the moment of momentum of
the discrete mechanical system
S with respect to the pole O, in a non-inertial frame
R , with the pole at the same point O and the axes
i
Ox parallel to the axes
i
Ox
′′
,
1, 2, 3i = , of the inertial frame
′
R (because the frame R does not rotate with
respect to the frame
′
R , the derivative with respect to time remains invariant and
d/d
ii
t=vr); this quantity takes a remarkable form by introducing the tensor of
inertia. Thus, observing that
()
() () () ()
2
() ()
ii ii
iii ii j
j
kk
j
ll k
xx xxδω×× = −⋅ = −rrr rr iωωω ,
multiplying by
i
m , summing for all the particles of the discrete mechanical system S
and introducing the tensor of inertia defined by the relation (3.1.81), we find a relation
of the form (3.1.83) for a quantity
O
K of the nature of a moment of momentum, which
will be called pseudomoment of momentum of the discrete mechanical system
S with
respect to the pole
O of the non-inertial frame R, i.e.
1
()
n
O
ii i
O
i
m
=
== ××
∑
KI r rωω,
(11.2.17)
where we have introduced the contracted product of the tensor of inertia at the pole
O
by the vector angular velocity; it results
O
OO
=+KKK,
(11.2.17')
where
1
n
ii i
O
i
m
=
=×
∑
Krv
(11.2.17'')
is the moment of momentum of the discrete mechanical system
S with respect to the
pole
O of the non-inertial frame R. We state
Theorem 11.2.7 (V. Vâlcovici, C. Iacob). The moment of momentum of a discrete
mechanical system with respect to a pole
O
′
of a given inertial frame of reference
′
R , in this frame, is equal to the sum of the moment of momentum of this system with
respect to an arbitrary pole
O of a non-inertial frame R (which does not rotate with
respect to the frame
′
R ), in the latter frame (the sum of the moment of momentum of
the system with respect to the pole
O in a non-inertial frame R, with the pole at the
very same point, and the contracted product of the tensor of inertia with respect to the
11 Dynamics of Discrete Mechanical Systems
61