Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


MECHANICAL SYSTEMS, CLASSICAL MODELS
to
AB
′
, but reaches a position closer to that of stable equilibrium AB; after a certain
number of oscillations, the blade remains at rest). The consumption of energy due to
which it is impossible to increase the sum
TV+
(leading to a useful work) or, at least,
to let it remain constant (realizing a perpetuum mobile of the first species) can be
explained by the apparition of certain internal forces of friction and of certain external
resistant forces (e.g., the resistance of the air). Hence, not all internal forces are
conservative; non-conservative internal forces (e.g., forces of friction, which have a
sense opposite to that of the displacements, leading to a negative internal work) can be
put into evidence too. If the discrete mechanical system
S is adiabatically isolated (has
changes of energy with the exterior only if upon it is effected an external work), we are
led to the notion of internal energy,
int
E
, which results just from the work of non-
conservative internal forces and can depend on temperature, mass, volume etc. If upon
an adiabatically isolated discrete mechanical system no external work is exerted, then
we may write
int
d( ) d 0TV E++ =;
(11.1.47)
but if an external work is exerted too, then we can write, in general,
int
d( ) d dTV E W++ = .
(11.1.47')
An adiabatically non-isolated discrete mechanical system may receive energy from the
exterior, even if upon it no external work is exerted; but a flux of heat
dQ can
intervene. We may thus write
int
d( ) d d dTV E W Q++ = + .
(11.1.47'')
Introducing also an elementary work of non-mechanical and non-caloric nature
dW
(e.g., of electromagnetic nature), we can write (after R.J. Mayer and J. Joule)
int
d( ) d d d dTV E W Q W++ = + + ;
(11.1.47''')
we obtain thus the first principle of thermodynamics. If
int
d0E = and the sum
dddWQW++ is an exact differential, we may state, after H. von Helmholtz, a
conservation theorem of energy of the form (11.1.46). One could thus say that it is
possible to realize a perpetuum mobile, where intervene transformations of kinetic,
potential and caloric energy or of other energies; but the experiment shows that the
caloric energy generated by frictions can be transformed in mechanical energy only by
loss of energy, the process being irreversible (one passes from mechanical energy to a
caloric one only by degradation).
11.1.2.8 Problem of n Particles
Let be an isolated (closed) free discrete mechanical system S, formed by n particles
i
P
of masses
i
m and position vectors
i
r , subjected only to the action of some internal
32
forces
ik ki
=−FF, ik≠ ,
, 1,2,...,ik n=
; if these forces are of Newtonian attraction
(or of Coulombian nature, of attraction or repulsion), then the corresponding problem is
known as the problem of
n particles. At a cosmic level, the celestial bodies can be
modelled, in a first approximation, as particles (e.g., the solar system, formed by the
Sun, the planets and their satellites, acted upon by other celestial bodies; their actions
are negligible external forces, due to the great distances at which these bodies are, as
well as due to their quasi-spherical distribution, their effects annulling each other). The
respective problem is called also the problem of
n bodies and is the basic problem in
celestial mechanics. At the atomic level, one has the same problem for the system
formed by nucleus and electrons.
The equations of motion read
1
'
n
ii
ik
k
m
=
=
∑
rF
,
3
i
k
ik ik
ik
mm
f
r
=Fr,
i
ik k
=−rrr, , 1,2,...,ik n= ,
(11.1.48)
and lead to the vector first integrals
1
n
ii
i
m
=
==
∑
HvC,
1
n
ii
i
Mmt
=
′
==+
∑
rCCρ , ,const
′
=
J
JJJJG
CC
,
(11.1.49)
which correspond to the conservation theorems of momentum and of rectilinear and
uniform motion of the centre of mass, respectively, to the vector first integral
11
2
nn
ii i i i
O
ii
mm
==
=×= =
∑∑
Krr CΩ , const=
J
JJJJG
C ,
(11.1.49')
which corresponds to the conservation theorem of moment of momentum, and to the
scalar first integral
2
111
1
'
2
nnn
i
k
ii
ik
iik
mm
TU mv f h
r
===
−= − =
∑∑∑
, consth = ,
(11.1.49'')
which corresponds to the conservation theorem of mechanical energy, where
i
ik k
PP=
J
JJJG
r , while f is the universal constant of attraction (we took into account
(1.1.84) and (3.2.6') for the forces of Newtonian attraction). We obtain thus ten scalar
first integrals for the 3n scalar differential equations of motion of second order. In 1887,
H. Burns showed that these first integrals are the only algebraic first integrals which can
be obtained; as well, in 1889, H. Poincaré stated that, besides these first integrals, one
cannot obtain other uniform and analytic first integrals, while Painlevé showed that
there does not exist other first integrals algebraic only with respect to the components
of the velocity vectors (neither for larger conditions). But, taking into account that time
does not appear explicitly in those first integrals, they are equivalent to 11 scalar first
integrals; moreover, observing that the internal forces depend only on the reciprocal
distances, one can obtain one more first integral. But there are necessary 6n scalar first
11 Dynamics of Discrete Mechanical Systems
33

MECHANICAL SYSTEMS, CLASSICAL MODELS
integrals to solve completely the problem, so that these 12 scalar first integrals are
sufficient only for
2n = .
We may write the n vector equations or the 3n scalar equations of motion,
respectively, in the form
ii i
mU=
r ∇ ,
()
ij
i
j
x
∂
=
∂
i∇
,
()
()
i
j
i
j
U
x
x
∂
=
∂
, 1,2,...,in= , 1, 2, 3j = .
(11.1.48')
The centre of mass
C of an isolated discrete mechanical system S (e.g., the solar
system) has a uniform and rectilinear motion, so that remains to be studied its motion of
rotation about that centre.
Starting from the equations (11.1.48'), we get
() () ()
()
11
nn
ii i
i
jj j
i
ii
j
U
mx x x U
x
==
∂
==−
∂
∑∑
,
where we used Euler’s formula for a function
U, homogeneous of degree −1. Taking
into account the first integral (11.1.49'') too, we get
()
2
() () () () () () () ()
2
111
d1d
2
d2
d
nnn
ii ii ii ii
iii
jj jj jj jj
iii
mxx xx mxx mxx U h
t
t
===
+= = =+
∑∑∑
;
one obtains thus the Lagrange-Jacobi formula (obtained by Lagrange in 1772 for
2n = and generalized by Jacobi in 1842 for any n)
2( 2 )
O
IUh=+
,
(11.1.50)
where
O
I is the polar moment of inertia of the discrete mechanical system S with
respect to the origin
O.
Starting from the algebraic identity
() ( )
2
22
() () ( ) ()
11 1 11
22'
nn n nn
ii ki
ii i
kk
jj jj
ki i ki
mmx mx mmx x
== = ==
⎛⎞
=+ −
⎜⎟
⎝⎠
∑∑ ∑ ∑∑
, 1, 2, 3j = ,
which can be easily verified, summing for
j from 1 to 3, introducing the mass M and
the moment of inertia
O
I
of the mechanical system S and taking into account the first
integral (11.1.28'''), it results
22
()
O
MI t R
′
=+ +CC
,
22
11
2'
nn
i
kik
ki
Rmmr
==
=
∑∑
;
(11.1.50')
introducing in (11.1.50), we can write also the formula
34
()
2
2
2
d
22
d
RMUh
t
=+
,
2
2
C
hh
M
=− ,
(11.1.50'')
equivalent to the formula (11.1.50) and called the Lagrange-Jacobi formula too. If, in
particular,
OC≡ , then we have =C0, so that hh= . Integrating twice with respect
to time, we get
[]
22
0
00
2d ()2d
t
RRQTM U h
τ
ττ τ=+ + +
∫∫
,
0
,constRQ=
.
(11.1.50''')
This last result allows to study the stability of the discrete mechanical system
S ;
after Jacobi, we say that this system is stable if the distances between the particles
remain finite, hence if
R is finite for t →∞. If there exists t so that tt∀> to have
2Uhε+>, 0ε > , then the discrete mechanical system S is labile; this takes place,
e.g., for
0h >
, because 0U > . We notice that one cannot have
2Uhε+<
, because
the second member of the relation (11.1.50''') would become negative for
t sufficiently
great. It results that, to ensure the stability of the discrete mechanical system
S it is
necessary that
0h <
and
2Uhε+<
for tt> .
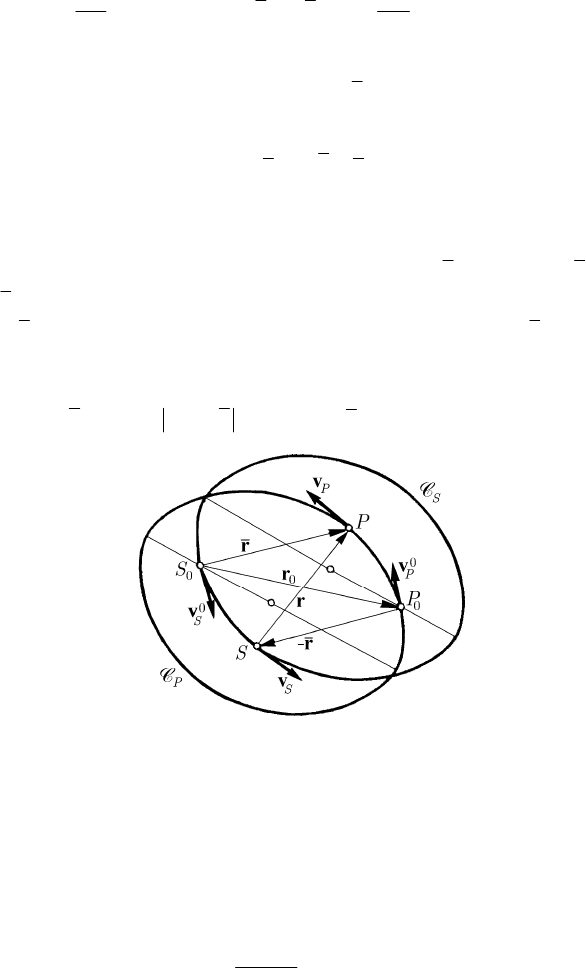
Fig. 11.5 Problem of two particles (the Sun and a planet)
The case
2n =
(the problem of two particles) has been considered in Chap. 8, Sect.
1.2.1, being reduced to the case of central forces (of attraction or of repulsion).
Assuming, e.g., that one of the particles is the Sun, of mass
M, the other particle being a
planet
P, of mass m, the equation of motion of a particle with respect to the other one
(for instance, the motion of the planet with respect to the Sun) reads (see the formula
(8.1.14))
2
Mm
f
r
+
=−
ru,
(11.1.51)
where
vers versSP==
J
JG
ur (Fig. 11.5); hence, the motion of the particle P with
respect to the particle
S is identical (for analogous initial conditions) to the motion of a
11 Dynamics of Discrete Mechanical Systems
35
MECHANICAL SYSTEMS, CLASSICAL MODELS
particle
P, of mass m, attracted with a Newtonian force by the fixed centre S, of mass
Mm+
, and one can use the results obtained in Chap. 9, Sects. 2.1.2–2.1.4. The
Theorems 9.2.1 and 9.2.2 (the first two laws of Kepler) remain, further, valid. It results
that the particle
P moves with respect to the particle S along the ellipse, after the law
of areas, the particle
S being situated at one of the foci; concerning the motion of the
particle
S with respect to the particle P, one can make analogous statements. The
formula (9.2.17') allows to write
(
)
(
)
1/2
22121
() 2
aam am
Ta a a
f
Mm fM M fM M
ππ π
−
==+≅−
+
, (11.1.51')
where
a is the semi-major axis of the ellipse described by the particle P, T being the
period in which this ellipse is entirely travelled through; hence, it results
(
)
(
)
222 2
1
3
44 4
11
()
Tmm
f
Mm fM M fM M
a
ππ π
−
==+≅−
+
.
(11.1.51'')
Observing that, in case of the solar system, the ratio
m/M is negligible with respect to
unity (one obtains the greatest ratio
()
3
/10mM
−
= O for Jupiter, while for the Earth
we have
()
6
/10mM
−
= O ), we can admit the third law of Kepler too, with a good
approximation (as a matter of fact, the astronomical observations of Tycho Brahe are
thus explained). In case of binary stars, the relation (11.1.51') allows to deduce the sum
of the two masses
Mm+ , taking into account that the quantities a and T can be
measured by astronomical observations.
Let
00
PS
−vv be the relative initial velocity of the particle P with respect to the
particle
S at the initial moment
0
t , where
0
P
v
and
0
S
v
are the initial velocities of the
particles
P and S, respectively. Taking into account the results in Chap. 9, Sect. 2.1.2,
it results that the trajectory of the particle
P is an ellipse if
()
2
00
0
2( )
PS
rfMm−< +vv , a parabola if
()
2
00
0
2( )
PS
rfMm−= +vv or a
hyperbola if
()
2
00
0
2( )
PS
rfMm−> +vv , where
000
SP=
J
JJJJG
r is the position vector at
the initial moment; hence, the genus of the conic depends on the initial conditions.
Analogously, the motion of the particle
S with respect to the particle P takes place as
that particle would be attracted by the centre
P, the attractive mass being Mm+ ; the
genus of the conic
S
C described by the particle S is specified by the same conditions,
so that this particle describes a conic of the same genus as that of the conic
P
C ,
described by the particle
P. The two conics are both in the plane determined by the
vectors
0
r and
00
PS
−vv, and are obtained one from the other by a plane translation;
36

hence, the axes of the two conics are parallel. If
P is a given position on
P
C , specified
In the case
3n = (the problem of three particles) one can no more obtain final
results in a finite form. If one of the particles,
S, has a mass M much greater than the
masses
1
m and
2
m of the other two particles
1
P and
2
P , respectively (e.g., the Sun
and two planets), then one can apply some methods of successive approximations.
Thus, one can consider, in a first approximation, the motion of the particles
S and
1
P
(as a problem of two particles). Further, one assumes that the particle
2
P perturbs the
Keplerian motion by the attraction exerted upon both particles
S and
1
P ; a perturbing
term which modifies the previous results is thus introduced. As a matter of fact, the
particle
1
P
perturbs the motion of the particle
2
P
too, introducing thus supplementary
In general, the problem of
n particles is decomposed in several problems
corresponding to
2n = or 3n = .
11.1.2.9 Discrete Mechanical Systems Subjected to Constraints
The discrete mechanical system
S of n particles
i
P
, of masses
i
m , and position
vectors
i
r , 1,2,...,in= , with respect to a fixed (inertial) frame of reference R,
previously considered, has 3n degrees of freedom, its position being specified by the
position of the representative point
()
k
PX in the representative space
3n
E . If m
holonomic (rheonomic or scleronomic) ideal scalar constraints intervene, then the
equations of motion, the general theorems and, as a consequence, the conservation
theorems must be completed, introducing the constraint forces too. In general, we
assume that the mechanical system
S is subjected to 3mn< bilateral, holonomic
(finite, of geometric nature) constraints of the form (3.2.8); if we would have
3n distinct
constraints, the position of the representative point
P, hence of the mechanical system
S, would be specified from a geometric point of view (uniqueness or not). The case of
non-holonomic constraints of the form (3.2.13) will be studied later by analytical
11 Dynamics of Discrete Mechanical Systems
by the vector
0
SP=
J
JJJG
r
, we set up the vector
0
PS =−
J
JJG
r
, obtaining thus the cor-
responding position on
S
C . We notice also that the sense of motion of the particles
and is the same on the conics
P
C and
S
C , respectively. In case of the solar
system, both conics are ellipses, as we have assumed in Fig. 11.5.
S
S
P
37
terms. The iterative process of computation is convergent. The inverse problem can
be also put: to determine the position and the characteristics of a perturbing particle
if (by measurement or observations, eventually) the perturbations in the motion of
another particle are known. Thus, Leverrier discovered in 1845 the planet Neptune,
studying the perturbations of motion of the neighbouring planet Uranus; in recent
years (in 1961), from observations concerning the perturbations of the component A
of the binary star 61 of the constellation Swan, one has concluded that around this
component, at a distance of 11 light years, moves a planet greater than Jupiter, on
an elliptic trajectory. In 2005, a tenth planet of the solar system, at a greater
distance from the Sun than Pluto, seems to be discovered.

MECHANICAL SYSTEMS, CLASSICAL MODELS
methods. Returning to the representative point
P, the m bilateral holonomic constraints
specify that this point must be at the intersection of
m hypersurfaces (fixed or movable,
as the constraints are scleronomic or rheonomic, respectively) in the representative
space
3n
E . In some cases, we can consider also unilateral constraints (the
representative point is at one side of a hypersurface).
Using the axiom of liberation from constraints and introducing the external
constraint forces
i
R (the resultant of the external constraint forces applied upon each
particle
i
P ) as well as the internal constraint forces
ik
R , ik≠ , 1,2,...,kn= , the
equations of motion (11.1.8) read
()
1
'
n
ii i i
ik ik
k
m
=
=+ + +
∑
rFR F R
, 1,2,...,in= ;
(11.1.52)
in components, we can write
()
() () () ( ) ( )
1
'
n
iii ikik
i
jj j j j
k
mx F R F R
=
=++ +
∑
, 1,2,...,in= , 1, 2, 3j = .
(11.1.52')
The position of the discrete mechanical system
S subjected to constraints can be
determined, at a given moment, by the equations (11.1.52') and by the constraint
relations, obtaining the functions
() ()
()
ii
jj
xxt= , 1,2,...,in= , 1, 2, 3j = ; in general,
we can state (as for
i
F and
ik
F , see Sect. 11.1.1.3) that
()
,;
ii
ll
t=
RRrr,
()
,;
ik ik l l
t=
RRrr, ik≠ , , 1,2,...,ik n= , the motion of each particle depending
on the motion of all other particles. In this case, the mechanical system
S subjected to
constraints works as a free discrete mechanical system.
We notice that all the results obtained in the case of free discrete mechanical systems
can be transcribed for the discrete mechanical system
S subjected to constraints if we
add the constraint (unknown) forces to the given ones. In the first fundamental problem,
besides the trajectories (the vector functions
()
ii
t=rr , 1,2,...,in= ), one must
determine also the constraint forces
i
R and
ik
R , ik≠ , , 1,2,...,ik n= . In the
second fundamental problem, one must determine the forces
i
F ,
ik
F and
i
R ,
ik
R ; the
problem has not a unique solution. As well, nor in case of a mixed fundamental
problem the solution is unique.
In what concerns the theorems of existence and uniqueness, they remain further valid
if the functions (3.2.8) fulfil the conditions asked in Sect. 11.1.1.4 (are functions of
class
1
C and fulfil conditions of Lipschitz type).
Corresponding to the results in Sects. 11.1.2.1 and 11.1.2.2, we can write
1
()
n
ii
i
=
=+=+
∑
HFRRR,
j
jj
HRR=+
, 1, 2, 3j = ,
(11.1.53)
1
()
n
ii
i
M
=
=+=+
∑
FR RRρ ,
j
jj
MRRρ =+ , 1, 2, 3j = ,
(11.1.53')
38

1
()
n
iii
OOO
i
=
=×+=+
∑
KrFRMM,
Oj Oj Oj
KMM=+
,
1, 2, 3j =
,
(11.1.53'')
stating thus (the theorems take place in case of holonomic constraints, as well as in case
of non-holonomic ones; as well, we can assume to have unilateral constraints):
Theorem 11.1.21 (theorem of momentum). The derivative with respect to time of the
momentum of a discrete mechanical system subjected to constraints is equal to the
resultant of the given and constraint external forces which act upon this system.
Theorem 11.1.22 (theorem of motion of the centre of mass). The centre of mass of a
discrete mechanical system subjected to constraints moves as a free particle at which
would be concentrated the whole mass of this system and which would be acted upon by
the resultant of the given and constraint external forces.
Theorem 11.1.23 (theorem of moment of momentum). The derivative with respect to
time of the moment of momentum of a discrete mechanical system subjected to
constraints, with respect to a fixed pole, is equal to the resultant moment of the given
and constraint external forces which act upon this system, with respect to the same
pole.
Introducing the areal accelerations as well as the notion of hodograph, we can state
theorems analogous to Theorems 11.1.8', 11.1.5' and 11.1.8'', respectively.
Observing that
{
}
{
}
{
}
ii i
OOO
τ=τ+τ
HFR,
(11.1.53''')
we may state
Theorem 11.1.24 (theorem of torsor). The derivative with respect to time of the torsor
of momenta of a discrete mechanical system subjected to constraints, with respect to a
fixed pole, is equal to the torsor of the given and constraint external forces which act
upon this system, with respect to the same pole.
Introducing the impulse of the resultant of the external constraint forces
2
1
1
d
n
t
i
t
i
t
=
∑
∫
R
and the impulse of the resultant moment of the external constraint forces
2
1
1
d
n
t
ii
t
i
t
=
×
∑
∫
rR , corresponding to the time interval
[
]
12
,tt , we can write (the internal
constraint forces do not intervene in computation)
222
111
1
()d d d
n
ttt
ii
ttt
i
ttt
=
Δ= + = +
∑
∫∫∫
HFR RR,
(11.1.54)
222
111
1
()d d d
n
ttt
iii
OOO
ttt
i
ttt
=
Δ= ×+ = +
∑
∫∫∫
KrFRMM
,
(11.1.54')
{}
{
}
{
}
22
11
dd
tt
ii i
OO O
tt
ttΔτ = τ + τ
∫∫
HF R
.
(11.1.54'')
The relation (11.1.24) is completed in the form
int
int
dd d d d
RR
TWW W W=+ + +
(11.1.55)
11 Dynamics of Discrete Mechanical Systems
39

MECHANICAL SYSTEMS, CLASSICAL MODELS
and we can state
Theorem 11.1.25 (theorem of kinetic energy). The differential of the kinetic energy of a
discrete mechanical system subjected to constraints is equal to the elementary work of
the given and constraint external and internal forces which act upon this system.
As it was shown in Chap. 3, Sect. 2.2.9, in case of scleronomic constraints (or even
in a more general case, that is in case of catastatic constraints) we have
int
dd 0
RR
WW==
; in this case, the Theorem 11.1.25, corresponding to a discrete
mechanical system subjected to constraints, is stated in the same form as the Theorem
11.1.10, corresponding to a free mechanical system. In what concerns the Theorems
11.1.10' and 11.1.10'', one can make analogous observations.
As well, if the moment of momentum is written with respect to a pole
Q, movable
with respect to the fixed origin
O, the formula (11.1.23') leads to
{} {} {}
{
}
,
ii i
QQQ Q
τ=τ+τ−×
HFR0vH.
(11.1.56)
Using the results given in Sects. 1.2.5–1.2.7, we may set up first integrals, in certain
conditions, in case of a discrete mechanical system subjected to constraints too. Thus, if
the sum
+RR is parallel to a fixed plane (is normal to a fixed direction of unit vector
u,
()
0+⋅=RRu ), then we can write the first integral (11.1.28); analogously, if the
sum
OO
+MM
is contained in a fixed plane (is normal to a fixed axis Δ, O Δ∈ , of
unit vector
u,
()
0
OO
+⋅=MMu ), then one obtains the first integral (11.1.31).
If
+=RR 0 (necessary condition of static equilibrium), then we can state a
conservation theorem of momentum and a theorem of rectilinear and uniform motion of
the mass centre, while if
OO
+=MM 0 (necessary condition of static equilibrium),
then we may state a conservation theorem of moment of momentum. If both conditions
are fulfilled simultaneously (necessary and sufficient conditions of static equilibrium in
case of a non-deformable mechanical system), then one can state a conservation
theorem of torsor.
In case of scleronomic (or even catastatic) constraints and of conservative internal
forces, we can state a theorem of mechanical energy in the form of Theorems 11.1.19–
11.1.19'', and if
d0W = too, for a certain interval of time, we obtain a conservation
theorem of mechanical energy, stated as the Theorem 11.1.20.
We mention that the conservation theorem of moment of momentum allows to state
in this case a theorem of areal velocities, and a theorem of areas too.
As in case of a free discrete mechanical system, one can obtain only
6n independent
first integrals; but these ones are sufficient to determine the motion. Even if the
constraint forces are not known a priori, the conditions imposed above are sometimes
fulfilled, so that one can build up first integrals also in case of discrete mechanical
systems subjected to constraints.
In case of constraints with friction one can make considerations analogous to those
in case of the motion of a single particle (see Chap. 6, Sect. 2.2.3).
40

11.1.2.10 Differential Principles of Mechanics
The equations of motion of a discrete mechanical system, free or subjected to
constraints, are written in the form (11.1.8) or in the form (11.1.52), respectively; these
equations correspond to the second principle of Newton, the first differential principle
of mechanics. As in the case of a single particle, this basic principle can be expressed
also in other equivalent forms, which are useful in various particular cases; if they are
considered as consequences of Newton’s principle, these equivalent forms are
theorems.
Introducing the forces of inertia
iii
m=−
Fr, 1,2,...,in= ,
(11.1.57)
the law of motion reads (we consider the more general case of a discrete mechanical
system subjected to constraints)
1
'( )
n
ii i
ik ik
k
=
++ + + =
∑
FFR F R 0, 1,2,...,in= ,
(11.1.58)
and we can state
Theorem 11.1.26 (d’Alembert). The motion of a discrete mechanical system subjected
to constraints takes place so that, at any moment, it is in dynamic equilibrium under the
action of the given and constraint, external and internal forces which act upon it and of
the forces of inertia.
Obviously, each particle (more general, each subsystem) of the system is in dynamic
equilibrium.
We introduce the forces
11
''
nn
iii i ii
ik ik
kk
m
==
=++ =+ −
∑∑
FF F F F rΦ , 1,2,...,in= ,
(11.1.59)
which are called the lost forces of d’Alembert; the equations (11.1.58) become, in this
case,
1
'
n
ii
ik
k
=
++ =
∑
RR0Φ , 1,2,...,in= ,
(11.1.60)
and we may state
Theorem 11.1.26' (d’Alembert). The motion of a discrete mechanical system subjected
to constraints takes place so that, at any moment, the constraint external and internal
forces are in equilibrium with the lost forces of d’Alembert.
This equilibrium takes place for each particle, hence for any subsystem of the
considered mechanical system. We can thus state:
Theorem 11.1.27 (theorem of dynamic equilibrium of parts). If a discrete mechanical
system
S subjected to constraints is, at a given moment, in dynamic equilibrium under
the action of the lost forces of d’Alembert and of the constraint external and internal
forces which act upon it, then any part of the system (any subsystem
S ⊂ S ) will be in
11 Dynamics of Discrete Mechanical Systems
41