Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


MECHANICAL SYSTEMS, CLASSICAL MODELS
22
11
21
1
() () d d
n
tt
i
tt
i
tt t t
=
Δ− =
∑
∫∫
HH H F R;
(11.1.18')
the variation of the momentum of a free discrete mechanical system in a finite interval
of time is thus put into evidence. The quantity
2
1
d
t
t
t
∫
R represents the impulse of the
resultant of the given external forces, corresponding to the interval of time
[
]
12
,tt .
The notion of hodograph, introduced in Chap. 5, Sect. 1.2.1, leads to a kinematical
interpretation of the Theorem 11.1.5; we state thus
Theorem 11.1.5' The velocity of a point which describes the hodograph of the
momentum of a free discrete mechanical system with respect to a fixed pole is
equipollent to the resultant of the given external forces which act upon this system.
11.1.2.2 Theorem of Moment of Momentum
We perform a vector product at the left of each equation of motion (11.1.8) by
i
r and
sum for all particles of the mechanical system
S ; taking into account the relation
(2.2.50) which is verified by the internal forces, we obtain
11
nn
ii i i i
ii
m
==
×= ×
∑∑
rr rF,
where the internal forces disappear. Introducing the momentum
i
H and the moment of
momentum
Oi
K , we notice that
()()()
dd
dd
ii i i i i i i i i i i i
Oi
mm m
tt
×= ×+×= ×= × =
rr rrrr rr rH K
,
so that we may write
1
d
d
n
O
ii
OO
i
t
=
==×=
∑
K
KrFM
,
() ()
1
n
ii
Oj jkl Oj
kl
i
KxM
=
= ∈ =
∑
F
,
1, 2, 3j =
.
(11.1.20)
Thus, we state
Theorem 11.1.8 (theorem of moment of momentum). The derivative with respect to time
of the moment of momentum of a free discrete mechanical system, with respect to a
fixed pole, is equal to the resultant moment of the given external forces which act upon
this system, with respect to the same pole.
In this theorem, the derivative
O
K
as well as the resultant moment of the given
external forces are bound vectors, applied at the pole
O. As well, the first relation
(11.1.20) remains valid if it is projected on a plane or on an axis (the second group of
relations (11.1.20)). We may also write
1
2
n
ii
O
i
m
=
=
∑
M
Ω ,
() () ()
11
2
nn
iii
ii
j
kl Oj
Oj k l
ii
mmxxMΩ
==
= ∈ =
∑∑
, 1, 2, 3j = , (11.1.20')
==
12
putting thus into evidence the areal accelerations of the component particles of the
mechanical system
S ; we can state
Theorem 11.1.8' (theorem of areal accelerations). The sum of the products of the
double masses of the particles of a free discrete mechanical system by their areal
accelerations, with respect to a given fixed pole, is equal to the resultant moment of the
given external forces which act upon this system with respect to the same pole.
Another form of the relation (11.1.20) is given by
22
11
21
1
() () d d
n
tt
ii
OO O O
tt
i
tt t t
=
Δ− ×=
∑
∫∫
KK K rF M;
(11.1.20'')
thus, the variation of the moment of momentum of a free discrete mechanical system, in
a finite interval of time, is put into evidence. The quantity
2
1
d
t
O
t
t
∫
M represents the
impulse of the resultant moment of the given forces with respect to the pole
O,
corresponding to the interval of time
[
]
12
,tt .
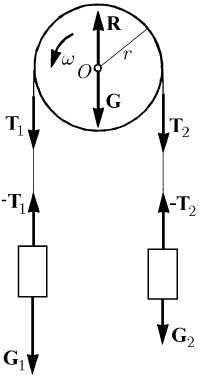
Fig. 11.1 The Atwood engine
With the aid of the hodograph too, the kinematic form of the theorem of moment of
momentum is expressed by (for the sake of simplicity, we choose the pole of the
moment of momentum as pole of the hodograph)
Theorem 11.1.8'' The velocity of the point which describes the hodograph of the
moment of momentum of a free discrete mechanical system with respect to a given fixed
pole is equipollent to the resultant moment of the given external forces which act upon
this system, with respect to the same pole.
We will use these results in the study of the Atwood engine, which allows to verify
the law of falling of the bodies. This engine is formed by a wheel of radius
r and weight
G, which is rotating frictionless, with the angular velocity ω, about a horizontal axle,
11 Dynamics of Discrete Mechanical Systems
==
13
MECHANICAL SYSTEMS, CLASSICAL MODELS
which passes through the pole
O; over the wheel passes frictionless an inextensible and
perfect flexible and torsionable thread, at the ends of which are suspended the weights
11
m=Gg
,
22
m=Gg
,
12
mm> (Fig. 11.1); we assume that the mechanical system
is moving with the velocity
12
vv v rω=== . The theorem of moment of momentum
is written in the form
11 22 1 2
d
()
d
O
Imvrmvrmgrmgr
t
ω ++ =−,
where
O
I is the polar moment of inertia of the wheel with respect to the pole O; in this
case, the acceleration
av=
is given by
12
mm
ag
m
−
=
′
,
12
2
O
I
mmm
r
′
=++
,
(11.1.21)
where
m
′
is the reduced mass of the mechanical system. We notice that ag< ; if the
difference
12
mm− is small, then we have ag . Thus, we obtain easy the
acceleration
a, in the frame of an experiment; the acceleration g is then given by the
formula (11.1.21) (
12
,,
O
mmI
and r are known quantities). The tensions
1
T
and
2
T
in
the thread and the constraint force
R are then easily obtained
1
11 21
() ( )
m
Tmga mmmg
m
′
=−= +−
′
,
2
22 12
() ( )
m
Tmga mmmg
m
′
=+= +−
′
,
(11.1.21')
12
12 12 21
()() ( )
mm
RmmgmmaG mmmgG
m
−
′
=+ −− += +− +
′
.
The theorem of moment of momentum with respect to the pole
O, written only for
the subsystem formed by the wheel (
()
12
O
ITTrω =−
), may be used to verify the
results obtained above.
11.1.2.3 Theorem of Torsor
Starting from (11.1.4), we notice that
{}
{
}
,
i
OO
τ=
HHK; but
11
d
d
nn
ii
ii
t
==
==
∑
∑
HHH,
()
11 1
d
d
nn n
ii iiii ii
O
ii i
t
== =
=×=×+×=×
∑∑ ∑
KrHrHrHrH
,
so that
{}
{
}
ii
OO
τ=τ
HH. Because
{
}
{
}
,
i
OO
τ=FRM, starting from (11.1.18)
and (11.1.20), we get
14

{} {} {}
d
d
iii
OOO
t
τ=τ=τ
HHF,
(11.1.22)
stating thus
Theorem 11.1.9 (theorem of torsor). The derivative with respect to time of the torsor of
momenta of a free discrete mechanical system with respect to a given fixed pole is equal
to the torsor of the given external forces which act upon this system, with respect to the
same pole.
Thus, by introducing the notion of torsor, we get a synthesis of the theorems of linear
and angular momenta, which has the advantage to contain only the given external
forces (the internal forces are eliminated). The theorem of torsor implies two vector
relations or six scalar relations.
The variation of the torsor of momenta of a free discrete mechanical system with
respect to a given fixed pole, in an interval of time
[
]
12
,tt , is obtained in the form
{} {} {}
{
}
2
21
1
d
t
ii i i
OO O O
tt tt
t
t
==
Δτ τ − τ τ
∫
HH H F==
.
(11.1.22')
This relation plays an important rôle in case of a small interval of time and, especially,
in case of discontinuous phenomena.
The general theorems stated above take place with respect to an inertial frame of
reference
R, considered as fixed; the theorem of moment of momentum and the
theorem of torsor, which depend on the pole
O, maintain their form with respect to
another pole
Q, rigidly connected to the frame R (fixed with respect to this frame). If
the pole
Q is movable, calculating further with respect to the frame R, the momentum
remains invariant, but (as in Chap. 6, Sect. 1.2.4) the moment of momentum and the
resultant moment of the given external forces become
OQQ
=+×KKrH,
OQQ
=+×MMrR,
Q
OQ=
J
JJG
r
;
replacing in (11.1.20) and taking into account (11.1.18), we may write (
ii
QP=
J
JJG
r
)
1
d
d
n
Q
ii
QQQQ
i
t
=
==×−×=−×
∑
K
KrFvHMvH
,
(11.1.23)
obtaining thus a generalized form of the theorem of moment of momentum. The
formula (11.1.22) is generalized in the form
{} {} {}
{}
d
,
d
iii
QQQQ
t
τ=τ=τ−×
HHF0vH
.
(11.1.23')
11.1.2.4 Theorem of Kinetic Energy
We perform a scalar product of each equation of motion (11.1.8) by
i
r and sum for all
the particles of the mechanical system
S, and obtain
11 Dynamics of Discrete Mechanical Systems
15

MECHANICAL SYSTEMS, CLASSICAL MODELS
1111
dd'd
nnnn
ii i i i i
ik
iiik
m
====
⋅= ⋅+ ⋅
∑∑∑∑
rr Fr F r
;
observing that
dd
dddd
dd
ii
iiii ii iiii
mmmm
tt
⋅= ⋅= ⋅= ⋅
rr
rrrrrr
2
1
d( )
2
ii
m=
r
2
1
d( ) d
2
ii i
mv T==
and taking into account (3.2.3), (3.2.4) and (11.1.6'), we may write
int
dd dTWW=+ , (11.1.24)
stating thus
Theorem 11.1.10 (theorem of kinetic energy; Daniel Bernoulli). The differential of the
kinetic energy of a free discrete mechanical system is equal to the elementary work of
the given external and internal forces which act upon this system.
Unlike the theorem of torsor, in the theorem of kinetic energy intervene also the
internal forces in calculation. Dividing the relation (11.1.24) by
dt and taking into
account (11.1.7), (11.1.7'), we can write this theorem in the form (closer to the previous
ones)
int
d
d
T
TPP
t
==+
,
(11.1.24')
obtaining thus
Theorem 11.1.10' (theorem of kinetic energy; second form). The derivative with
respect to time of the kinetic energy of a free discrete mechanical system is equal to the
power of the given external and internal forces which act upon this system.
In general, the elementary work is not an exact differential (it is a Pfaff form); the
theorem of kinetic energy may be written in the form (for
[
]
12
,ttt∈ , between the
positions
1
P and
2
P of the representative point P in the space
3n
E )
qq
12 12
2121
int
() ()
PP PP
TTt Tt T T W WΔ= − = − = +
qq
12 12
111
d'd
nnn
ii i
ik
PP PP
iik
===
=⋅+ ⋅
∑∑∑
∫∫
Fr F r
2222
1111
int
111
d' dd d
nnn
tttt
ii i
ik
tttt
iik
ttPtPt
===
=⋅+ ⋅=+
∑∑∑
∫∫∫∫
Fv F v
(11.1.24'')
and we can state
Theorem 11.1.10'' (theorem of kinetic energy; finite form). The variation of the kinetic
energy of a free discrete mechanical system in a finite interval of time is equal to the
work effected by the external and internal forces which act upon this system in the
considered interval of time.
16

If we write the relation (11.1.18') for only one particle
i
P (we must introduce also
the influence of the internal forces) and if we perform a scalar product by the velocity
(2)
i
v at the finite moment (the velocity
(1)
i
v takes place at the initial moment), and if
we sum for all the particles of the discrete mechanical system
S, then we obtain
()
2
1
2
(2) (1) (2) (2)
11 1 1
'd
nn n n
t
ii i
ik
iiii
t
ii i k
mv m t
== = =
⎛⎞
−⋅=⋅+
⎜⎟
⎝⎠
∑∑ ∑ ∑
∫
vv v F F ;
introducing the notations
()
2
(1)
1
1
1
2
n
i
i
i
Tmv
=
=
∑
,
()
2
(2)
2
1
1
2
n
i
i
i
Tmv
=
=
∑
,
()
2
(0)
0
1
1
2
n
i
i
i
Tmv
=
=
∑
,
(11.1.25)
where
0
T is the kinetic energy of the lost velocities, while
(0) (2) (1)
iii
=−vvv, it results
2
1
(2)
0
11
'd
nn
t
i
ik
i
t
ik
TT t
==
⎛⎞
Δ+ = ⋅ +
⎜⎟
⎝⎠
∑∑
∫
vFF
(11.1.26)
and we can state
Theorem 11.1.11 The sum of the variation of the kinetic energy of a free discrete
mechanical system in a finite interval of time and the kinetic energy of the lost velocities
in the same interval of time is equal to the sum of the scalar products of the impulses of
the given external and internal forces which act upon this system, corresponding to the
considered interval of time, by the velocities of the particles at the final moment.
Analogously, we find (we perform a scalar product by the velocities
(1)
i
v and sum
for all the particles of the mechanical system
S )
2
1
(1)
0
11
'd
nn
t
i
ik
i
t
ik
TT t
==
⎛⎞
Δ− = ⋅ +
⎜⎟
⎝⎠
∑∑
∫
vFF
(11.1.26')
and state
Theorem 11.1.11' The difference between the variation of the kinetic energy of a free
discrete mechanical system in a finite interval of time and the kinetic energy of the lost
velocities in the same interval of time is equal to the sum of the scalar products of the
impulses of the given external and internal forces which act upon this system,
corresponding to the considered interval of time, by the velocities of the particles at the
initial moment.
Summing the relations (11.1.26) and (11.1.26') and taking into account the relation
(11.1.24''), we get
qq
()
2
12 12
1
(1) (2)
int
11
1
'd
2
nn
t
i
ik
ii
PP PP
t
ik
TW W t
==
⎛⎞
Δ= + = + ⋅ +
⎜⎟
⎝⎠
∑∑
∫
vv F F ;
(11.1.27)
thus, we state
11 Dynamics of Discrete Mechanical Systems
17

MECHANICAL SYSTEMS, CLASSICAL MODELS
Theorem 11.1.12 (Kelvin). The work effected by the given external and internal forces
which act upon a free discrete mechanical system in a finite interval of time (the
variation of the kinetic energy of the respective mechanical system) is equal to the sum
of the scalar products of the impulses of the given external and internal forces which
act upon this system, corresponding to the considered interval of time, by the semi-sum
of the velocities of the particles at the initial and final moments.
Subtracting the relation (11.1.26') from the relation (11.1.26), we may write
2
1
(0)
0
11
1
'd
2
nn
t
i
ik
i
t
ik
Tt
==
⎛⎞
=⋅+
⎜⎟
⎝⎠
∑∑
∫
vFF;
(11.1.27')
there results
Theorem 11.1.12' (analogue to Kelvin’s theorem). The kinetic energy of the lost
velocities of a free discrete mechanical system in a finite interval of time is equal to half
of the sum of the scalar products of the impulses of the given external and internal
forces, which act upon this system, corresponding to the considered interval of time, by
the lost velocities, in the same interval of time.
If the given external and internal forces which act upon a free discrete mechanical
system
S satisfy certain conditions, then the general theorems stated above lead to
conservation theorems (hence, to first integrals of the system of differential equations of
motion). Thus, if the resultant
R of the given external forces is parallel to a fixed plane
(is normal to a fixed direction of unit vector
u, with respect to the frame R , or has a
zero component,
0⋅=Ru ), as in the case of a single particle (see Chap. 6, Sect.
1.2.5), then the theorem of momentum allows to write
() ()
111
nnn
ii
ii j j i
jj
iii
muHumvC
===
⋅=⋅ = = =
∑∑∑
Hu u v , constC = ;
(11.1.28)
we obtain thus a scalar first integral. Hence, if the resultant
R of the given external
forces is parallel to a fixed plane, then the projection of the momentum of the free
discrete mechanical system
S on the normal to this plane is conserved (is constant) in
time. Because
11 1
d
d
nn n
i i ii ii
ii i
mm mC
t
== =
⎛⎞
⋅=⋅=⋅ =
⎜⎟
⎝⎠
∑∑ ∑
uvur ur
,
it results
()
11
nn
i
ii j i
j
ii
mumxCtC
==
′
⋅= =+
∑∑
ur , ,constCC
′
= ,
(11.1.28')
obtaining a new scalar first integral, independent of the previous one; thus, the
mentioned condition allows to build up two independent scalar first integrals.
11.1.2.5 Conservation Theorems of Momentum. Applications
18
Analogously, if the resultant
R has a fixed direction (is normal to two non-parallel
fixed directions with respect to the frame
R or has two zero components), then we
obtain four independent scalar first integrals of the form (11.1.28), (11.1.28'), while the
projection of the momentum of the free discrete mechanical system
S on a plane
normal to the resultant
R (determined by the two fixed directions) is conserved in time.
Finally, if the resultant
R of the given external forces vanishes (is normal to three
distinct fixed directions), then we may set up three independent scalar first integrals of
the form (11.1.28). As a matter of fact,
=R0 leads to =
H0 and to
1
n
ii
i
m
=
==
∑
HvC, const=
J
JJJJG
C ,
ii
HC= , 1, 2, 3i = ,
(11.1.28'')
hence to a vector first integral, equivalent to three scalar first integrals; we state thus
(we take into account (11.1.19) too)
Theorem 11.1.13 (conservation theorem of momentum). The momentum (and the
velocity of the centre of mass) of a free discrete mechanical system is conserved in time
if and only if the resultant of the given external forces which act upon it vanishes.
Starting from (11.1.19), we can write
Mt
′
=+CC
ρ
,
,const
′
=
J
JJJJG
CC
,
ii i
MCtCρ
′
=+
,
1, 2, 3i =
;
(11.1.28''')
thus, we get a new vector first integral, equivalent to three scalar first integrals, and we
may state
Theorem 11.1.14 (theorem of rectilinear and uniform motion of the centre of mass).
The motion of the centre of mass of a free discrete mechanical system is rectilinear and
uniform if and only if the resultant of the given external forces which act upon this
system vanishes.
Observing that the Theorem 11.1.14 is a consequence of the Theorem 11.1.13 (and
inversely), it results that the conservation theorem of momentum allows to set up two
vector first integrals or six scalar first integrals (the maximal number of independent
scalar first integrals which can be obtained).
Returning to the Theorem 11.1.7 of general motion of the centre of mass of a free
discrete mechanical system, we can mention many applications. Let thus be a discrete
mechanical system
S of free particles launched in vacuum and subjected only to the
action of a uniform gravitational field; no matter the internal forces could be, the centre
of mass
C of the mechanical system S (considered as a particle acted upon by the
resultant of the gravity forces) describes an arc of parabola of vertical axis. For
instance, if a projectile launched in the vicinity of the Earth explodes at a certain
moment, then the particles thus obtained (various parts of the projectile) are moving so
that the instantaneous centre of mass of the system thus formed describes, further, the
same parabola; indeed, the forces which are developed by explosion are internal ones
and do not intervene in calculation. If, at a certain moment, intervene also other external
forces (e.g., the collision of a part of the projectile with the ground or other bodies),
then the trajectory of the centre of mass is modified.
We have seen that, in the absence of external forces, the centre of mass has a
rectilinear and uniform motion; this result has been verified by many astronomical
11 Dynamics of Discrete Mechanical Systems
19

MECHANICAL SYSTEMS, CLASSICAL MODELS
observations. Indeed, assuming that the solar system is isolated (it is not acted upon by
external forces, which can be practically accepted, because the other stars and their
planets are at great distances from the solar system, so that their influence may be
neglected), its centre of mass (very close to the centre of mass of the Sun) has a
rectilinear motion, with a velocity of
19.5 km/s, towards a point called Apex, in the
vicinity of the star Vega of the constellation Lyra.
If, in the above case, the initial velocity of the centre of mass is zero with respect to
an inertial frame of reference
R, then the centre of mass is at rest with respect to this
frame at any moment. Assuming that the theorem of motion of the centre of mass can
be applied also in case of continuous mechanical systems (as it will be seen in Sect.
12.1.2.1), we will apply the above results to living matter too. The will of living beings
puts in action their muscles; these actions are internal forces, which do not intervene in
computation, so that a living being can change the rectilinear and uniform motion (or
the rest) of its centre of mass only by acting upon some external mechanical systems
(bodies). Thus, a man which stays on a perfect smooth horizontal plane cannot advance
(cannot “go”); indeed, the external forces which act upon the human body are vertical,
so that its centre of mass can move only along the vertical (there exist no horizontal
components). The going becomes possible only because, in reality, the ground (plane
surface) cannot be perfect smooth, a sliding friction taking, practically, place. In this
case, the man, immobile at the beginning, raises a foot and advances one step; the other
foot, in contact with the ground, tends to make a motion in an opposite direction, not to
have a horizontal component of motion of the mass centre. At this moment appears an
oblique reaction of the ground, with a horizontal component due to friction, directed
towards forward; this reaction transported parallel to itself at the centre of mass,
determines a forward motion.
Let us consider the case of a non-deformable mechanical system
S of mass M,
which has a motion of translation of velocity
v with respect to a fixed frame of
reference
R, and a particle P of mass m, which moves with a velocity u with respect to
the mechanical system
S, hence with a velocity
′
=+
vvu with respect to the frame
R ; we assume that the resultant of the external forces which act upon the mechanical
system
{}
P=∪
′
SS
vanishes. The conservation theorem of momentum allows to
write
()Mm Mm m
′
+=+ +=vv vuC, const=
J
JJJJG
C ;
(11.1.29)
if the mechanical system
′
S is at rest with respect to the frame R at the initial
moment
0
t (
00
() ()tt
′
==vv 0, hence
0
()t =u0), then we get =C0, so that
m
Mm
=−
+
vu
.
(11.1.29')
Hence, if the particle
P begins to move with the velocity u with respect to the non-
deformable system
S, then a velocity v of opposite direction is conveyed to the latter
one; supposing that
mM (hence /( ) /mM m mM+≅ ), it results vu.
20
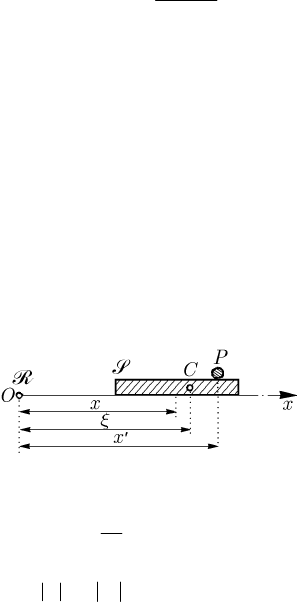
The motion being rectilinear, in this case, we can consider that it takes place along the
Ox-axis, the mass centre of the mechanical system S (materialized by a rigid straight
bar, Fig. 11.2) having the abscissa
()xt and the velocity ()vt , while the particle P is
of abscissa
()xt
′
and velocity () () ()vt vt ut
′
=+ ( ()ut is the velocity with respect
to the mechanical system
S ); we may thus write
0Mv mv
′
+=,
m
vu
Mm
=−
+
.
(11.1.30)
Integrating with respect to time (which corresponds to the Theorem 11.1.14), it results
00
()constMx mx Mx mx M m ξ
′′
+= + =+ =
,
(11.1.30')
where
00
()xxt= ,
00
()xxt
′′
= , while
0
() ( ) constttξξ== is the abscissa of the
mass centre
C of the mechanical system
′
S (Fig. 11.2), which remains at rest with
respect to the frame
R. Denoting by
0
xxδ =− ,
0
xxδ
′′′
=−
the displacements of
the mechanical system
S and of the particle P, respectively, positive in the positive
sense of the
Ox-axis, we obtain the displacement of the mechanical system S as a
function of the displacement of the particle
P (of an opposite direction to the latter one)
Fig. 11.2 Motion of translation of a mechanical system
m
M
δδ
′
=−
;
(11.1.30'')
because
mM , it results δδ
′
too. These results explain why the centre of
mass of the system formed by a boat (on a non-running water) and by a man is not
displacing, no matter the action of the man upon the boat (if the man moves in a
direction, then the boat moves in the opposite one); if the boat is near to the border and
the man advances in it towards the border, trying to go down, then the boat moves away
from the border. Analogously, the repulsion of a gun at the moment of the discharge is
thus explained; the velocity of this repulsion is given by the second formula (11.1.30)
as a function of the initial velocity of the projectile (bullet), while the formula
(11.1.30'') gives the displacement back of the gun (of its mass centre) as a function of
the distance travelled through by the projectile along its barrel (during the time in which
the gun
S and the projectile P form a mechanical system
′
S ).
11 Dynamics of Discrete Mechanical Systems
21