Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


MECHANICAL SYSTEMS, CLASSICAL MODELS
dynamic equilibrium too, at that moment, under the action of the lost forces of
d’Alembert and of the constraint forces which act upon that part.
Theorem 11.1.27' (theorem of rigidity). Assuming that a given discrete mechanical
system subjected to constraints becomes rigid at a certain moment, the conditions of
dynamic equilibrium of the new mechanical system represent necessary conditions for
the motion of the given mechanical system at that moment.
We notice that, applying the theorem of rigidity to all parts of the discrete
mechanical system
S (to all subsystems S ⊂ S ), we get sufficient conditions to
describe the motion. Indeed, taking, e.g., all the subsystems formed by two particles,
there result the conditions of vanishing torsor (it is sufficient to mention only the
conditions concerning the resultants)
11
''
nn
ii j j
ik jk
kk
==
++ +++ =
∑∑
RR RR0ΦΦ , , 1,2,...,ij n= ,
which, obviously, lead to the conditions (11.1.60).
The relation (11.1.59) may be written also in the form
1
'()
n
iiiiii
ik
k
m
=
+=+−=+
∑
FF F rΦΦ, 1,2,...,in= ;
it results that only the components
ii i
m =−
rF of the forces
i
F
have a contribution to
the motion of the discrete mechanical system, the components
i
Φ
being lost by
equilibrating the constraint forces (the given denomination is thus justified).
We notice that each of the Theorems 11.1.26 and 11.1.26' can stay at the basis of the
Newtonian mathematical model of mechanics, representing each of them a differential
principle of mechanics.
Formally, the Equations (11.1.60), which represent the necessary and sufficient
conditions of dynamic equilibrium (characterizing entirely the motion of the discrete
mechanical system subjected to constraints) do not differ from the relations (4.1.55),
which represent the necessary and sufficient conditions of static equilibrium of such a
system. Hence, all the considerations made for the problems of statics (including the
Theorems 4.1.6' and 4.1.7'), starting from the relations (4.1.55), can be transposed for
the similar problems with a dynamic character, replacing the given forces
i
F
and
ik
F
,
ik≠
, , 1,2,...,ik n= , by the lost forces
i
Φ
of d’Alembert; e.g., the condition
(4.1.56) leads to the theorem of torsor, characterized by the formula (11.1.53'''). In fact,
we can use all the results in Chap. 4, Sects. 1.2.1–1.2.3. Thus, we may write a necessary
condition for the motion in the form
{
}
{
}
ii
OO
τ+τ =R0Φ
(11.1.61)
or in the form
1
()
n
ii
i
=
+=
∑
R0Φ ,
1
()
n
iii
i
=
×+ =
∑
rR0Φ ,
(11.1.61')
stating
42
Theorem 11.1.24' (theorem of torsor; second form). The motion of a discrete
mechanical system subjected to constraints takes place so that, at any moment, the sum
of the torsor of the lost forces of d’Alembert with respect to a fixed pole and the torsor
of the constraint external forces with respect to the same pole vanishes.
Let be a discrete mechanical system
S subjected to ideal constraints (for which the
virtual work of the constraint forces (3.2.36) vanishes). We start from the necessary and
sufficient equations of motion (11.1.60), written in the form (by
i
R
we mean the
resultant of all constraint forces, without distinction between external and internal ones)
ii
+=R0Φ ,
1,2,...,in=
; (11.1.62)
if we perform a scalar product by the virtual displacements
i
δr , we sum for all particles
of the mechanical system
S and take into account the relation of definition of ideal
constraints (3.2.36), then we obtain the relation
1
0
n
ii
i
=
⋅δ =
∑
rΦ ,
(11.1.63)
which represents a necessary condition to describe the motion. Assuming that the
condition (11.1.63) is fulfilled and that the system is subjected to
p holonomic
constraints of the form (3.2.21'') and to
m non-holonomic constraints of the form
(3.2.15), we can use the method of Lagrange’s multipliers; we may thus write
11 1
0
p
nm
ii i
ll kki
il k
fλμ
== =
⎛⎞
++ ⋅δ=
⎜⎟
⎝⎠
∑∑ ∑
rΦ∇ α ,
where
l
λ ,
1,2,...,lp=
,
k
μ ,
1,2,...,km=
are non-determinate scalars (Lagrange’s
multipliers) and where we noticed that in a finite double sum one can invert the order of
summation. By a demonstration analogous to that in Chap. 3, Sect. 2.2.9, we get finally,
11
p
m
ii
ll kki
lk
fλμ
==
++=
∑∑
0Φ∇ α, 1,2,...in= .
(11.1.64)
We find again the relations (3.2.37) which give the constraint forces, the relations
(11.1.64) being thus equivalent to the relations (11.1.62). We can state (the relation
(11.1.63) becomes a sufficient condition too)
Theorem 11.1.28 (theorem of virtual work; d’Alembert-Lagrange). The motion of a
discrete mechanical system subjected to ideal constraints takes place so that the virtual
work of the lost forces of d’Alembert, which act upon it, vanishes for any system of
virtual displacements of the respective mechanical system.
Taking into account the equivalence between the relation (11.1.63), which represents
the theorem of virtual work, and the relations (11.1.62), which represent the form taken
by Newton’s equations, it results that the theorem of virtual work can be considered as
being a principle (the principle of virtual work or the principle of virtual
11 Dynamics of Discrete Mechanical Systems
43

MECHANICAL SYSTEMS, CLASSICAL MODELS
displacements), because – starting from it – one can solve the fundamental problems of
dynamics.
The equations (11.1.64) are known as Lagrange’s equations of the first kind.
Introducing the virtual velocities (3.2.1'), we may write the condition (11.1.63) in the
form
1
0
n
ii
i
∗
=
⋅=
∑
vΦ ,
(11.1.63')
the considered principle being thus called the principle of virtual velocities too.
In case of holonomic (of the form (3.2.16
iv
)) or non-holonomic (of the form (3.2.16))
ideal unilateral constraints, the virtual work of the constraint forces verifies the
inequality (3.2.36'). The principle of virtual work is expressed, in this case, in the form
1
0
n
ii
i
=
⋅δ ≤
∑
rΦ
(11.1.63'')
for any system of virtual displacements, representing the necessary and sufficient
condition to describe the motion in case of a discrete mechanical system subjected to
ideal unilateral constraints; in this case too, one can make considerations analogous to
those above.
11.1.2.11 General Considerations
The general (universal) theorems of mechanics are expressed in a torsor form
(containing two vector relations) or in a scalar form. The theorem of torsor (including
the theorem of momentum and the theorem of moment of momentum) is expressed by
vector relations between quantities of kinetic nature and given and constraint external
forces (the internal forces do not intervene – this is a great advantage from the point of
view of practical computation). The theorem of kinetic energy is expressed by a scalar
relation between quantities of kinetic nature and given and constraint, external and
internal forces (in this theorem intervene – in general – all types of forces; in case of
catastatic constraints, the constraint forces do not intervene). These seven scalar
relations allow to obtain, in certain conditions, till ten scalar first integrals (the
conservation theorem of momentum allows to write six first integrals, the conservation
theorem of moment of momentum leads to three first integrals, while the conservation
theorem of mechanical energy represents only one first integral).
We notice, after V. Vâlcovici, that one can group the three general Theorems 11.1.5,
11.1.8 and 11.1.10' in the form
00
int
d
() ()
d
OO
cT c P P
t
⋅+⋅ + = ⋅+⋅ + +vH K vR Mωω,
(11.1.65)
where
{
}
0
, vω represents a finite rototranslation
()
0
,const=
J
JJJJG
v
ω , while constc = is
a scalar. One can obtain this result effecting a scalar product of each equation (11.1.8)
by the vector
0 ii
c+×+vrvω
,
1,2,...,in=
, and summing for all the values of the
44

index
i. If, in particular, the constant quantities
0
v , ω and c (equivalent to seven scalar
constants) are so that
0
int
()0
O
cP P⋅+× + + =vR Mω (eventually, Pdt or/and
int
dPt are exact differentials), then we have
0
const
O
cT⋅+× + =vH Kω ,
obtaining a first integral of the system of equations of motion. If we take
0c = , it
results
00
d
()
d
OO
t
⋅+⋅ = ⋅+⋅
vH K vR Mωω
(11.1.65')
and we can state
Theorem 11.1.29 (theorem of power of the kinetic torsor; V. Vâlcovici). The derivative
with respect to time of the power of the torsor of momenta of a free discrete mechanical
system, with respect to a fixed pole, by a constant finite rototranslation, is equal to the
power of the torsor of the given external forces which act upon this system, with respect
to the same pole.
These relations represent necessary conditions to describe the motion of a
deformable (in general) discrete mechanical system; indeed, in this case the lost forces
of d’Alembert are modelled by bound vectors. In case of a non-deformable discrete
mechanical system, these forces are modelled by sliding vectors, so that these relations
become also sufficient conditions to describe the motion; in fact (as it will be seen in
next chapter), in this case the theorem of torsor entirely characterizes the motion, the
theorem of kinetic energy being a linear consequence of it. In the case of a non-
deformable discrete mechanical system too, we notice that
int
int
dd 0
R
WW==, so
that the theorem of kinetic energy takes the simpler form
dd d
R
TWW=+ , (11.1.55')
while, in the case of scleronomic constraints, we get
ddTW= . (11.1.55'')
Unlike the universal theorems, the theorem of virtual work expresses always a
necessary and sufficient condition to describe the motion, in the hypothesis of ideal
constraints of the discrete mechanical system. This theorem has the advantage to
contain only the given external and internal forces (the constraint forces do not
intervene in computation); the motion can be thus studied without determining,
previously, the constraint forces.
Besides the momentum
H, which is called also kinetic resultant, one can introduce
also the dynamic resultant
11 1
nn n
iiiii
ii i
mm
== =
== =
∑∑ ∑
AA a r
;
(11.1.66)
we notice the obvious relation
=
AH.
(11.1.66')
11 Dynamics of Discrete Mechanical Systems
45

MECHANICAL SYSTEMS, CLASSICAL MODELS
Analogously, besides the moment of momentum
O
K (which is a kinetic moment), with
respect to the pole
O, one can introduce also the dynamic moment, with respect to the
same pole,
11 1
() ()
nn n
iii iii
OOi
ii i
mm
== =
==×=×
∑∑ ∑
D D ra rr;
(11.1.67)
we obtain the obvious relation
OO
=
DK
.
(11.1.67')
The relations (11.1.53) and (11.1.53'') may be written, in this case, in the form
1
()
n
ii
i
=
=+=+
∑
AFRRR
,
j
jj
ARR=+, 1, 2, 3j = ,
(11.1.66'')
1
()
n
iii
OOO
i
=
=×+=+
∑
DrFRMM,
Oj Oj Oj
DMM=+
,
1, 2, 3j =
,
(11.1.67'')
stating thus:
Theorem 11.1.30 (theorem of dynamic resultant). The dynamic resultant of a discrete
mechanical system subjected to constraints is equal to the resultant of the given and
constraint external forces which act upon this system.
Theorem 11.1.31 (theorem of dynamic moment). The dynamic moment of a discrete
mechanical system subjected to constraints, with respect to a fixed pole, is equal to the
resultant moment of the given and constraint external forces which act upon this
system, with respect to the same pole.
The torsor of momenta
{
}
i
O
τ H is called also kinetic torsor; analogously, one can
introduce the dynamic torsor
{
}
i
O
τ A . Observing that
{
}
{
}
ii
OO
τ=τ
AH,
(11.1.68)
it results
{
}
{
}
{
}
ii i
OOO
τ=τ+τAFR
(11.1.68')
and we can state
Theorem 11.1.32 (theorem of dynamic torsor; Newton-Euler). The dynamic torsor of a
discrete mechanical system subjected to constraints, with respect to a fixed pole, is
equal to the torsor of the given and constraint external forces which act upon this
system, with respect to the same pole.
Taking into account (11.1.65), we may write
00
int
()
OO
cT c P P⋅+⋅ + = ⋅+⋅ + +
vA D vR M
ωω
(11.1.65'')
too; in the particular case
0c = , we state
46

Theorem 11.1.29' (theorem of power of the dynamic torsor). The power of the dynamic
torsor of a free discrete mechanical system, with respect to a fixed pole, by a constant
finite rototranslation, is equal to the power of the torsor of the given external forces
which act upon this system, with respect to the same pole.
Obviously, the influence of the constraint forces may be also introduced in the
Theorems 11.1.29 and 11.1.29'.
These results are equivalent to those previously obtained; besides, they can give
sometimes useful information concerning the motion of a discrete mechanical system
S.
From the above exposition (as a completion to Chap. 1, Sect. 1.2.3), one can affirm
that, by conjugating elements of kinematics with elements of mass geometry, one
obtains the kinetics, which deals with the motion of mechanical systems supplied with
mass, without taking into account the forces which act upon them; if the forces
intervene too, then one has to do with dynamics.
11.1.2.12 Group Properties
Let be the system of equations of motion (11.1.8). Let us also assume that the given
forces are conservative (or quasi-conservative) in their totality, deriving from the simple
potential (or quasi-potential)
===
=+
∑∑∑
rr r rr r rr rrrr
12 12
111
1
( , ,..., , , ,..., ; ) ( , ; ) ' ( , , , ; )
2
nnn
nn
iii i i
ik k k
iik
UtUtUt
,
(11.1.69)
in the form
1
'
n
ii
ik
k
U
=
+=
∑
FF∇ ,
iii
U=F ∇ ,
1
()
2
i
ik ik ki
UU=+F ∇ , , 1,2,...,ik n= ;
(11.1.69')
for the sake of generality we assume that the potential (quasi-potential) depends on
velocities too.
In case of a transformation of the form
0ii
′
=+
rrr,
0
const=
J
JJJJG
r ,
ii
′
=
rr,
1,2,...,in=
, tt
′
= ,
(11.1.70)
which belongs to the group of space translations
T, with three parameters (see Chap. 6,
Sect. 1.2.3 too), we may write
12 12 0
1
( , ,..., ) ( , ,..., )
n
nn
i
i
UU U
=
′′ ′
−=⋅
∑
rr r rr r r ∇
,
corresponding to Lagrange’s theorem. Hence, if
12 12 12 12
( , ,..., , , ,..., ; ) ( , ,..., , , ,..., ; )
nn nn
UtUt
′′ ′ ′′ ′
=
rr rrr r rr rrr r ,
(11.1.71)
then we have
11 Dynamics of Discrete Mechanical Systems
47
MECHANICAL SYSTEMS, CLASSICAL MODELS
1
n
i
i
U
=
=
∑
0∇
(11.1.71')
too, the sum of the given forces vanishing. We can thus state
Theorem 11.1.33 If the simple potential (quasi-potential) of the given conservative
(quasi-conservative) forces which act upon a free discrete mechanical system is
invariant with respect to the group of space translations
T, then the momentum of this
system is conserved in time.
Taking into account the relation
ii
kk
′′
−=−
rr rr, we notice that the relation
(11.1.71) takes place if
(;)
iii
UU t=
r , (,,;)
ii
ik ik k k
UU t=−
rrrr , , 1,2,...,ik n= ,
hence if the external forces vanish (isolated mechanical system), while the internal
forces depend on the distances between two particles (
()
;
i
ik ik k
PP t=
J
JJJG
FF , verifying
the principle of action and reaction).
As well, in case of a transformation of the form (
α is a constant tensor of second
order)
ii
′
=
rrα ,
ii
′
=
rrα ,
1,2,...,in=
, tt
′
= ,
(11.1.70')
which belongs to the group SO(3) of finite rotations with three parameters (special
orthogonal group in
3
E ), we notice that the relations
()( )
() () ()()
()()
ik ik
mp m mp
pp
ii j jm
k k jl jl
ll
xx xxαα ααδ
′′
⋅= ⋅ = ⋅ =
rr r r i iαα
()() ()() ()()ik ik ik
pp
jp i
j
llp k
llll
xx xx xxαα δ====⋅rr,
ii
kk
′′
⋅=⋅
rr rr
and, in particular, the relations
22
ii
′
=
rr
,
22
ii
′
=
rr
,
, 1,2,...,ik n=
, take place; one
can also show that these relations occur only in case of a transformation of the form
(11.1.70'). In such conditions, a theorem of Cauchy allows to state that a relation of the
form (11.1.71) takes place only and only if (the dependence on velocities has not been
mentioned)
()
222
11 21 3 1 2 122 3 1
, , ,..., , , , ,..., ,
nnn
n
UU
−
=⋅⋅⋅⋅⋅ ⋅rr rr r r rr rrr r r rr .
We can write
()
() () ( )
() () ( )
1 1 11
n n nn
i im
ii
jkl l jkl l
j j
k
i im
i i im
pp
k
U U
U x x x
x xx
= = ==
∂ ∂
×=∈ =∈ =
∂ ∂
∑ ∑ ∑∑
r i i0∇
as a product of two tensors, one symmetric and the other skew-symmetric with respect
to the indices
j and k, the resultant moment of the given forces being thus equal to zero.
We state
48
Theorem 11.1.34 If the simple potential (quasi-potential) of the given conservative
(quasi-conservative) forces which act upon a free mechanical system is invariant with
respect to the group SO(3) of finite rotations, then the moment of momentum of this
system is conserved in time.
Noting that
22
ii
kk
′′
−=−rr rr
,
22
ii
kk
′′
−=−
rr rr
,
ii
′
=
rr,
ii
′
=
rr,
we can state that the relation (11.1.71) takes place if (we have
()
;
i
ik ik k
PP t=
J
JJJG
FF ,
verifying the principle of action and reaction)
()
,;
iiii
UU t=
rr ,
()
,;
ii
ik ik k k
UU t=−−
rrrr , , 1,2,...,ik n= .
By a transformation of the form
ii
′
=
rr,
ii
′
=
rr, 1,2,...,in= ,
0
ttt
′
=+,
0
constt = ,
(11.1.70'')
of the temporal variable, which belongs to the Abelian group of time translations
T
with one parameter, we can write
00
() () /Ut Ut t U t tU
′
−=∂∂=
, using Lagrange’s
theorem. If
() ()Ut Ut
′
= , then it results () 0Ut =
too, so that one cannot have a
quasi-potential (hence, nor a quasi-conservative force). If
12
(,,..., )
n
UU= rr r , non-
depending on velocities, hence if
()
iii
UU= r , (, )
i
ik ik k
UU= rr , , 1,2,...,ik n= (in
fact,
()
i
ik ik k
UU=−rr, to can verify the basic principle of the internal forces), then
1
dd
n
ii
i
UU
=
=⋅
∑
r∇
and we may state
Theorem 11.1.35 If the simple potential of the given conservative forces which act
upon a free mechanical system is invariant with respect to the group of time
translations
T, then the mechanical energy of this system is conserved in time.
Finally, let be a transformation of the form
0ii
t
′
=+rrv,
0ii
′
=+
rrv,
0
const=
J
JJJJG
v
, 1,2,...,in= , tt
′
= ,
(11.1.70''')
which belongs to the Abelian group
Γ of Galileo, with three parameters. We notice that
the acceleration
i
r
, hence the dynamic resultant A, given by (11.1.66), is invariant to
such a transformation too. In the conditions of the Theorem 11.1.33, it results
=A0,
while the potential (quasi-potential)
U is invariant to a transformation of the form
(11.1.70); a relation of the form (11.1.71) takes place also with respect to the
transformation (11.1.70''') if
()
ii
UUt= ,
()
,;
ii
ik ik k k
UU t=−−
rrrr , as a
particular case (the mechanical system is isolated, while the internal forces verify the
principle of action and reaction). Taking into account the theorem of motion of the mass
centre, we may state
11 Dynamics of Discrete Mechanical Systems
49
MECHANICAL SYSTEMS, CLASSICAL MODELS
Theorem 11.1.36 If the simple potential (quasi-potential) of the given conservative
(quasi-conservative) forces which act upon a free discrete mechanical system is
invariant with respect to the Galileo group, then the mass centre of this system has a
uniform rectilinear motion with respect to an inertial frame of reference.
The four groups of transformations considered are subgroups of the Galileo-Newton
group
G, with ten parameters, leading to the three vector and one scalar first integrals
(hence, to the ten scalar first integrals) mentioned above.
We will use the group properties to determine the first integrals of the equations of
motion in a unitary theory, in the frame of Lagrangian and Hamiltonian mechanics.
11.2 Dynamics of Discrete Mechanical Systems with Respect
In what follows, we present the form taken by the general theorems of mechanics with
respect to a non-inertial frame of reference; to this goal, we compute first of all the
mechanical quantities previously introduced (momentum, moment of momentum,
kinetic energy, work, power) with respect to such a frame. Especially, if the frame has
the pole at the mass centre of the considered discrete mechanical system, then the
results obtained have a remarkable form.
11.2.1 Motion of a Discrete Mechanical System with Respect
We introduce a Koenig frame of reference with respect to the mass centre of a discrete
mechanical system and present the general and conservation theorems with respect to
such a frame. We make also some considerations concerning the problem of
n bodies.
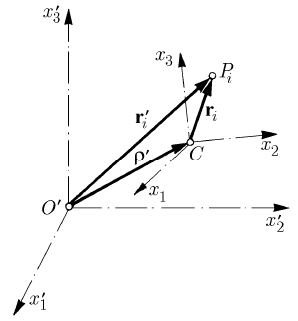
11.2.1.1 Koenig’s Frame of Reference. Koenig’s Theorems
By a Koenig frame of reference we mean a non-inertial frame
R, of axes
i
Cx
,
1, 2, 3i = (movable with respect to the inertial frame
′
R , of axes
j
Ox
′′
, 1, 2, 3j = ,
considered fixed), which has its pole at the centre of mass
C (of position vector
′
ρ
) of
the discrete mechanical system
S and which does not rotate (it moves with the axes
parallel to themselves) with respect to the frame
′
R (Fig. 11.6). One passes from the
frame
′
R to the frame R by relations of the form
ii
′′
=+
rr
ρ
,
() ()ii
j
jj
xxρ
′
=+
, 1,2,...,in= , 1, 2, 3j = ;
(11.2.1)
because
0ω= , in conformity to the hypothesis made above, it results that
ii
′′
=+
rr
ρ
, 1,2,...,in= .
(11.2.1')
In this case, the momentum is given by (we denote by “prime” the quantities
calculated with respect to the fixed frame
′
R )
to a Non-inertial Frame of Reference
to a Koenig Frame of Reference
50
()
11
nn
ii i i
ii
mm M
==
′′ ′′
== +=
∑∑
Hr r
ρρ
,
(11.2.2)
where we took into account the relations (properties of the mass centre)
1
n
i
i
mM
=
=
∑
,
1
n
ii
i
m
=
=
∑
r0,
1
n
ii
i
m
=
=
∑
r0;
(11.2.1'')
this result is known and may be obtained by differentiating the relation (3.1.9) with
respect to time.
The moment of momentum is expressed in the form
()()
11
()
nn
iii ii i
O
ii
mm
′
==
′′′ ′ ′
=× = +×+
∑∑
Krr r r
ρρ
11 11
()
nn nn
iii ii ii i
ii ii
mm m m
== ==
⎛⎞
′′ ′′
=× + ×+× +×
⎜⎟
⎝⎠
∑
∑∑∑
rr r rρρ ρρ ,
Fig. 11.6 Motion with respect to a Koenig frame of reference
wherefrom one gets the relation
()
()
C
O
C
M
′
′′′
=+×
KK
ρρ
,
(11.2.3)
()C
C
K
being the moment of momentum of the system with respect to the centre of mass
(in the relative motion, with respect to a Koenig frame with the pole at
C ); we can thus
state
Theorem 11.2.1 (S. Koenig). The moment of momentum of a discrete mechanical
system with respect to a fixed pole is equal to the sum of the moment of momentum of
the same system with respect to the pole of a Koenig frame of reference and the moment
of momentum of its mass centre at which the whole mass of the mechanical system is
concentrated, with respect to the fixed pole.
11 Dynamics of Discrete Mechanical Systems
51