Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


respect to the time
t is reduced to the corresponding partial derivative ( / tΦΦ=∂ ∂
or
/ t=∂ ∂
ΨΨ
, respectively); this derivative is called material derivative. We notice that
one can use the relation (12.1.3) also in the form
0
(;)t=−rrur
(12.1.3'')
on
×DT
.
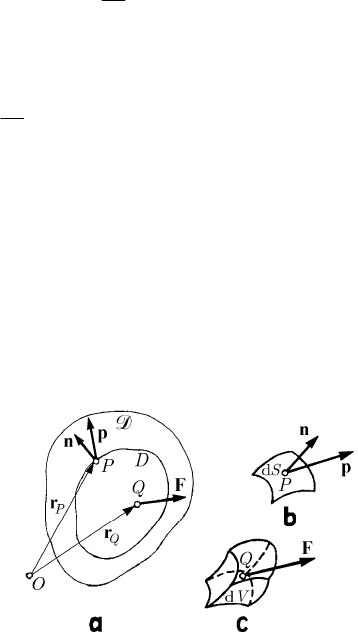
Fig. 12.1 Material and spatial co-ordinates
In a spatial description (convenient in case of fluids) we define the characteristic
quantities (velocity, density, pressure etc.) as functions of
r and t; e.g., to have (;)tvr
means to know the velocities of all particles (at any moment) which pass through all the
points
P (of the domain D ). From the equations
d
(;)
d
i
i
x
vt
t
=
r ,
1,2, 3i =
,
(12.1.4)
we obtain the trajectories of motion; indeed, if the solution exists and is unique, then we
can write the independent first integrals
123
(,, ;)
ii
f
xxxt C= , const
i
C = ,
1,2, 3i =
,
which, on the basis of the theorem of implicit functions, lead to the relations (12.1.2)
(we assume that for
0
tt= we have
0
ii
xx= , hence
()
000
1230
,,;
ii
C fxxxt= ). But, in
general, it is sufficient to determine fields (e.g., scalar fields) of the form
(;)
f
ft= r ;
the derivative of such a quantity with respect to time (the material derivative) is given
by the formula
,
dd
dd
i
ii
i
x
f
ff
f
vf f f
ttxt
∂∂
= + =+ =+⋅
∂∂
v ∇ ,
(12.1.5)
on
×DT. Analogously, one obtains the material derivative of a vector field too; the
acceleration is given by
d
()
dt
==+⋅
v
avvv
∇
(12.1.6)
on
×DT
. If we take into account the relation (12.1.2), then we notice that a quantity
(;)
f
tr , defined in spatial co-ordinates, may be studied in a material description in the
form
0
(;) (( ;);)
f
tf tt=rrr.
83
12 Dynamics of Continuous Mechanical Systems

We call material variety (point, curve, surface, three-dimensional domain) a variety
formed of particles; often, the use of such a variety can very much simplify the study of
the motion of the considered mechanical system
S. In conformity to the conservation
theorem of material varieties, their images are varieties of the same order. Taking into
account the conditions (3.2.18) imposed to a particle subjected to finite constraints, one
can show that (Euler-Lagrange criterion) a surface of equation
(;) 0tΦ =r is material
(is the image of a material surface) if (necessary and sufficient condition)
d
grad 0
dt
Φ
ΦΦ
=+⋅ =
v .
(12.1.7)
In case of a vector field
(;)trΨ , its lines are material curves if and only if the formula
(Helmholtz-Zorawski criterion)
[
]
curl( ) div×+ ×+ =
vv 0
ΨΨ Ψ Ψ
,
(12.1.8)
which can be put in connection with the formula (A.2.81'), holds. In particular, for
= vΨ it results
×=vv 0, (12.1.8')
that is the necessary and sufficient condition for the field lines (current lines) of the
velocity to be trajectories.
The mass
()m S of the mechanical system S (including a continuous mechanical
system) has been introduced in Chap. 1, Sect. 1.1.6, its mathematical model having
certain properties: i)
()0m >S ; ii) the property of additivity; iii)
.
0m = .
Differentiating in the sense of the theory of distributions, we find the density
(;)tμμ= r , which is given by the relation (1.1.71).
Besides the formulae given in Chap. 1, Sect. 1.1.9 and in Ann., Sect. 2.3.5, it is
useful to establish other two formulae of differentiation for the integrals which depend
on a parameter. Let be such an integral of the form
123 123
()
()
(,, ;)(,, ;)d
Dt
Dt
I Fxxxt xxxtμτ≡
∫∫∫
,
(12.1.9)
where dτ is the element of volume. Observing that
div( ) div( )FFμμ=vv
gradFμ+⋅v , we may write
()
()
() ()
d
div( ) d grad d
d
Dt
Dt Dt
I
F
FF
tt t
μ
μτ μ τ
∂
∂
⎡⎤
=+++⋅
⎢⎥
∂∂
⎣⎦
∫∫∫ ∫∫∫
vv;
according to the relation (1.1.79'), the first integral vanishes, while the relation (12.1.5)
allows to write
()
()
d
d
d
dd
Dt
Dt
I
F
tt
μτ=
∫∫∫
.
(12.1.9')
84
MECHANICAL SYSTEMS, CLASSICAL MODELS

Analogously, for the vector integral
()
()
(;)(;)d
Dt
Dt
ttμτ≡
∫∫∫
IVrr
,
(12.1.10)
we obtain
()
()
d
d
d
dd
Dt
Dt
tt
μτ=
∫∫∫
I
V
.
(12.1.10')
We notice that the physical properties of material bodies, which are modelled as
mechanical systems, do not depend neither on the frame of reference, nor if that one is
at rest or in motion; hence, these properties are characterized by objective quantities
(independent on the frame), which satisfy the principle of objectivity (the principle of
material indifference, the principle of frame independence). The most general relation
between co-ordinates and time with respect to a frame
R and a chronology C or a
frame
′
R
and a chronology
′
C
, respectively, is of the form
()
0
( ) () ()
iijjji
xt Q t x x ct
′′
=−+, 1, 2, 3i = ,
0
ttt
′
=+ ,
0
0
,const
j
xt= ,
(12.1.11)
where
Q is a proper orthogonal matrix (
TT
==QQ Q Q I , det 1=Q ), the frames
being right-handed orthonormed, while
()tc is a vector. A scalar quantity s is objective
if
(;) (;)stst
′′
=rr,
(12.1.12)
a vector quantity
V is objective if
(;) ()(;)ttt
′′′
=Vr Q Vr ,
iijj
VQV
′
=
, 1, 2, 3i = ,
(12.1.12')
while a tensor quantity
T of second order is objective if
T
(;) ()(;) ()tttt
′′′
=Tr Q Tr Q ,
ij
ik jl kl
TQQT
′
=
, ,1,2,3ij= .
(12.1.12'')
Because the considered frames are movable (
()t=QQ and ()t=cc), these relations
are different from those which define a scalar, a vector or a tensor of second order. One
can easily see that the position vector, the velocity and the acceleration are not objective
vectors. The unit mass is an objective scalar.
12.1.1.2 General Principles
The principles of mechanics, so as they have been enounced in Chap. 1, Sect. 1.2.1 for
a particle and as they have been used in Chap. 11 for a discrete mechanical system (a
finite number of particles), cannot satisfactorily describe the evolution of a continuous
85
12 Dynamics of Continuous Mechanical Systems

mechanical system
S. To pass from discrete to continuum, from a finite to an infinite
number of particles, it is necessary much rigour; as a matter of fact, this represents the
passing from a finite number to an infinite number of degrees of freedom (excepting the
case of the rigid solid). Indeed, the notion of particle (of finite positive mass) loses its
sense, because it would lead to an infinite mass for the mechanical system
S. The
notions of velocity and acceleration are linked to a point (hence to a particle), so that
Newton’s law (1.1.89) can no more be applied in this form; as a matter of fact, all
principles of mechanics must be formulated of new and consequently adapted. The
principles which allow the mathematical modelling of a continuous mechanical system
must be formulated so as to can reduce them to Galileo-Newton principles in case of a
discrete mechanical system.
To express these principles, we denote by
S a subsystem of the system S, D ⊂ D
being the domain occupied by that one, while
ωΩ⊂
is its geometric support. The
principles of motion of the continuous deformable media are expressed by balance
relations of the form
dd
dddd
dd
DDD
mVSV
tt
ω
μμ
∂
==+
∫∫∫ ∫∫∫ ∫∫ ∫∫∫
QQRnS, D∀⊂D ,
(12.1.13)
where
Q and S are tensors of the same order defined on D × T , while R is a tensor of
an order greater with a unity, defined on
D × T
,
DD D=∪∂
; hence, at any
moment
t, the increasing (or decreasing) of a quantity of density μ for any subsystem S
is due to a flux of entering (or exit) through
D∂ and of positive (or negative) internal
sources, μ
S being their intensity on the unit volume. Applying the formula (12.1.10') to
the integral at the left, as well as a formula of flux-divergence type (of the type of the
formula (A.2.67)), we get
()
ddivd
DD
VVμμ=+
∫∫∫ ∫∫∫
QRS
,
D∀⊂D
;
assuming that R are fields of class
1
()CD and μ
Q
and μS are fields of class
0
()CD
and observing that
D is an arbitrary subdomain, we obtain the local form of the balance
equations (for continuous motions)
div μμ+=
RSQ
.
(12.1.13')
We can enounce thus four important principles, i.e.:
i)
Conservation principle of mass. The mass ()mS of any subsystem S ⊂ S is
conserved during the motion.
This principle, which synthesizes all the three axioms at the basis of the definition of
mass, may be expressed in the form
() 0mS =
, S∀⊂S ,
(12.1.14)
86
MECHANICAL SYSTEMS, CLASSICAL MODELS
and may be obtained from (12.1.13) if one makes
==RS0 and
=QI
. In a material
description, one gets d’Alembert’s condition of mass continuity (1.1.76), while, in a
spatial description, it results Euler’s condition of mass continuity in the form (1.1.79) or
in the form (1.1.79'). The latter relation is equivalent to
div( ) d 0
D
V
t
μ
μ
∂
⎡⎤
+=
⎢⎥
∂
⎣⎦
∫∫∫
v .
Applying the Gauss-Ostrogradskiĭ formula (A.2.67), we obtain
dd
DD
VS
t
μ
μ
∂
∂
=− ⋅
∂
∫∫∫ ∫
vn , D∀⊂D ;
(12.1.15)
this equation (called transportation equation of mass) shows that the mass variation of
D in a unity of time (the left member) is due to the flux of matter through the frontier
∂
D (we are led to a decrease of mass if 0⋅>vn or to an increase of mass if
0⋅<vn ).
ii)
Principle of internal forces (Cauchy). For any subsystem S ⊂ S which
occupies the domain
D ⊂ D there exists a distribution of internal forces p on the
frontier ∂
D, the action of which upon the subsystem S is equivalent to the action of the
subsystem
SS 3 upon the same subsystem.
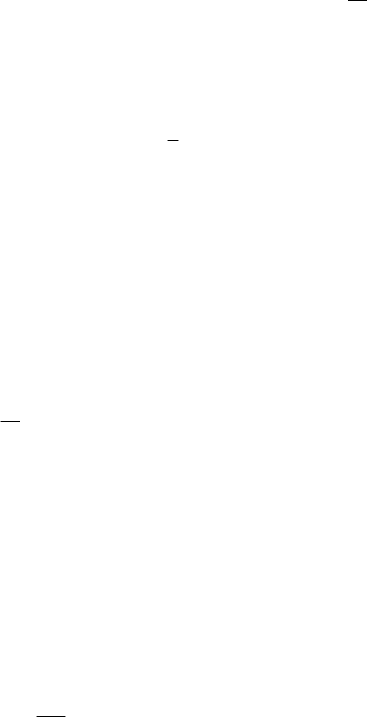
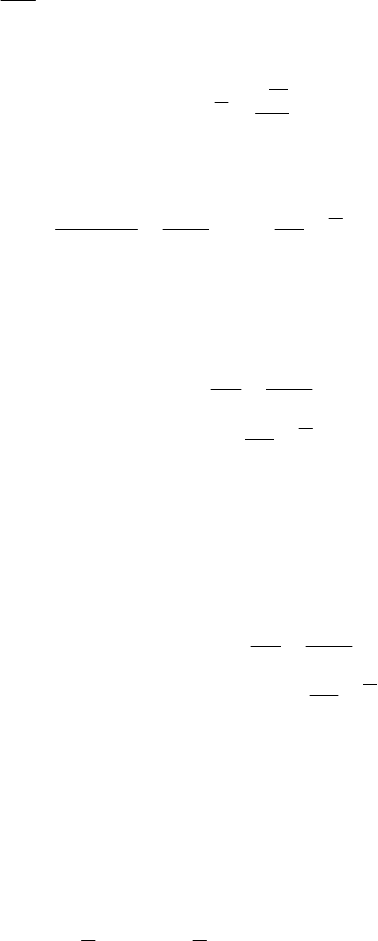
Fig. 12.2 Continuous mechanical system. Internal forces (a);
stress vector (b); body force (c)
This principle is, in fact, a postulate of existence. It corresponds to the Theorem
11.1.27 of dynamic equilibrium of parts for discrete mechanical systems, being an
extension of it for a continuous case (Fig. 12.2a). In case of a discrete mechanical
system, upon a subsystem of it may act external forces on a part of the frontier (which
can be also zero) and internal forces on the rest of it (which can be the whole frontier
too); analogously, a particle subjected to constraints may be considered as being a
subsystem of the system formed by that particle and the subsystem which generates the
constraints. In case of a continuous mechanical system arises just such a situation,
where the internal forces
p are not known a priori; they must be determined using the
equations of motion (equilibrium). The superficial forces
p represent a density and
87
12 Dynamics of Continuous Mechanical Systems
form – obviously – an absolutely continuous surface field. Corresponding to Cauchy’s
mathematical modelling, the internal force
p at a point P of position vector r on ∂D is
the same for all surfaces of same external normal
n and of same tangent plane at P; this
dependence is expressed in the form (Fig. 12.2b)
(,;)t=ppnr,
(12.1.16)
the vector
p (denoted sometimes by (;)
nn
t=ppr) being called stress vector. In case of a
fluid, the internal normal (of unit vector −
n) is used, because the stress vector
corresponds to a predominant phenomenon of compression (in case of a deformable
solid, both compression and stretching appear).
Besides the stress vectors
p, which represent contact actions, we will consider
actions at distance too, expressed by a field of body (mass) forces
F, referred to a unit
mass, which we assume to be absolutely continuous functions of volume. Unlike the
stress vectors, which depend on the configuration of the continuous mechanical system,
the body forces do not depend on this configuration (
(;)t=FFr, Fig. 12.2c). As the
contact actions, the actions at distance are represented by objective quantities; such
quantities are the body force
F (
′
=
FQF) and the stress vector p (
′
=
pQp).
We have seen that the principle ii) corresponds to the theorem of dynamic
equilibrium of parts. In the mathematical modelling of a continuous mechanical system,
we use – further – the results obtained for discrete mechanical systems, adapting them
consequently. Thus, the theorem of rigidity, which – applied to all subsystems of a
discrete mechanical system – gives sufficient equations to describe the motion of that
system, may be extended to a continuum, enouncing
iii)
Principle of variation of kinetic torsor. The derivative with respect to time of
the kinetic torsor of any subsystem
S ⊂ S , in any of its configurations, with respect to
a fixed pole, is equal to the torsor of the forces which act upon that subsystem, with
respect to the same pole.
Obviously, the forces which act upon the considered subsystem
S are body forces F
(given forces) and internal forces p (forces linking with the subsystem SS 3 ),
postulated by Cauchy. As well, we assume the existence of an inertial frame of
reference and of a chronology with respect to which we may enounce this principle. In
fact, this principle contains two parts:
iii
1
) Principle of variation of momentum. The derivative with respect to time of the
momentum of any subsystem
S ⊂ S , in any of its configurations, is equal to the
resultant of the forces which act upon that subsystem.
Starting from the relation of definition (11.1.1) of the momentum of an arbitrary
mechanical system
S, we can write
() (;)(;)d
D
SttVμ=
∫∫∫
Hrvr
(12.1.17)
for a subsystem
S ⊂ S of a continuous mechanical system, where D is the domain
occupied by that subsystem in the actual state, at the moment
t. Introducing the actions
of contact and at distance mentioned above, we may express this principle in the form
88
MECHANICAL SYSTEMS, CLASSICAL MODELS

d
dd d
d
n
DDD
VS V
t
μμ
∂
=+
∫∫∫ ∫∫ ∫∫∫
vp F, D∀⊂D .
(12.1.17')
iii
2
) Principle of variation of moment of momentum. The derivative with respect
to time of the moment of momentum of any subsystem
S ⊂ S , in any of its
configurations, with respect to a fixed pole, is equal to the moment of the forces which
act upon that subsystem, with respect to the same pole.
The relation of definition (11.1.2) of the moment of momentum of an arbitrary
mechanical system
S with respect to a given pole O leads to
[]
() (;)(;)d
O
D
SttVμ=×
∫∫∫
Krrvr
(12.1.18)
for the subsystem
S ⊂ S of a continuous mechanical system. Putting in evidence the
moment of the forces of contact or at distance considered above, we have
d
()d d ()d
d
n
DDD
VS V
t
μμ
∂
×=×+×
∫∫∫ ∫∫ ∫∫∫
rv rp rF, D∀⊂D .
(12.1.18')
In the case in which
S ≡ S , it results D ≡ D , while the stress vectors
n
p become
given external superficial forces. The two equations (12.1.17'), (12.1.18') have, in this
case, the advantage to contain only given external forces, hence known ones, but
represent only necessary conditions to describe the motion of the continuous
mechanical system
S.
The formula (12.1.10') allows to express the equations (12.1.17'), (12.1.18') also in
the form
dd d
n
DDD
VS Vμμ
∂
=+
∫∫∫ ∫∫ ∫∫∫
ap F, D∀⊂D ,
(12.1.19)
()d d ()d
n
DDD
VS Vμμ
∂
×=×+×
∫∫∫ ∫∫ ∫∫∫
ra rp rF, D∀⊂D ,
(12.1.19')
being thus led to another principle, equivalent to the principle iii); we may enounce
iii')
Principle of variation of the dynamic torsor. The dynamic torsor of any
subsystem
S ⊂ S , in any of its configurations, with respect to a fixed pole, is equal to
the torsor of the forces which act upon that subsystem, with respect to the same pole.
This principle contains the principle of variation of the dynamic resultant (12.1.19)
and the principle of variation of the dynamic moment (12.1.19').
The conditions of static equilibrium are obtained writing that the position vector of
each particle remains constant in time (
=v0); 0t∀≥ , these conditions have the form
dd
n
DD
SVμ
∂
+=
∫∫ ∫∫∫
pF0,
D∀⊂D
,
(12.1.20)
d()d
n
DD
SVμ
∂
×+ × =
∫∫ ∫∫∫
rp r F 0,
D∀⊂D
.
(12.1.20')
Applying the principle of variation of momentum to a subdomain of the form of a
cylinder the height of which tends to zero, we may state
89
12 Dynamics of Continuous Mechanical Systems

Theorem 12.1.1 (Cauchy). At the same point of a continuous mechanical system and at
the same moment, the stress vector verifies the relation
(,;) ( ,;)tt=− −pnr p nr .
(12.1.21)
Considering a domain in the form of a three-orthogonal tetrahedron, for which the
height relative to the inclined face tends to zero, and applying the principle of variation
of momentum, we find the relation
(,;) ( ,;)
j
j
ttn=pnr pi r
.
(12.1.22)
where
j
n are the components of the unit vector n of the external normal to the element
of surface which passes through the point
P of position vector r. Projecting this relation
on the co-ordinate axis of unit vector
j
i , we can state
Theorem 12.1.2 (Cauchy’s basic theorem). The state of stress (the stress vector p)
around a point of a continuous mechanical system may be linearly expressed by means
of a tensor of second order (the stress tensor σ) in the form
T
(,;) (;)tt=pnr r nσ
,
n
j
ij
i
pnσ= , (,;)
ij j i
ptσ = ir ,
,1,2,3
ij=
.
(12.1.22')
Applying also the principle of variation of moment of momentum to the same domain,
one can see that the stress tensor is symmetric (the relation
T
=σσ,
ij ji
σσ= ,
,1,2,3ij= , takes place). We notice that the tensor σ defined on D is an objective one.
Taking into account the Theorem 12.1.2, we can write the principles iii
1
) and iii
2
) by
means of the balance equations
T
d
ddd
d
DD D
VSV
t
μμ
∂
=+
∫∫∫ ∫∫ ∫∫∫
vnFσ , D∀⊂D ,
(12.1.23)
T
d
()d ( )d ()d
d
DD D
VSV
t
μμ
∂
×=× +×
∫∫∫ ∫∫ ∫∫∫
rv r n rFσ
,
D∀⊂D
,
(12.1.23')
which are of the form (12.1.13); the local form of those balance equations is
T
div μμ+=Faσ ,
,
j
ij i i
Faσμμ+=, 1, 2,3i = .
(12.1.23'')
Assuming that
(,;)tpnr is the given superficial force which acts upon the
continuous mechanical system
S (the jump of the stress vector by passing through the
frontier ∂
D is equal to zero), the basic theorem of Cauchy, expressed in the form
(12.1.22'), allows to put the boundary conditions in stresses at any moment
0
tt≥ . For
a complete formulation of the boundary value problem of a continuous mechanical
system we enounce also
iv)
Principle of initial conditions. The evolution of a continuous mechanical system
S may be determined
0
tt∀> if the state (positions and velocities) of that system at
the initial moment
0
t is known.
90
MECHANICAL SYSTEMS, CLASSICAL MODELS
This principle puts in evidence the deterministic aspect of classical models of the
continuous mechanical systems (in general, of any mechanical system).
Corresponding to the ideas expressed in Chap. 11, Sect. 1.2.7, we can enounce the
first principle of thermodynamics (see relation (11.1.47''') in the form
int
dd( )d d ddETVE WQW=++ =++, D∀⊂D ,
(12.1.24)
where
V is the potential energy, T is the kinetic energy given by (11.1.6) and expressed
in the form
2
1
() (;) (;)d
2
D
TS tv t Vμ=
∫∫∫
rr ,
(12.1.25)
D being the domain occupied by the subsystem S ⊂ S in the actual state at the
moment
t,
int
E is the internal energy (an objective scalar state quantity) of the
subsystem
S, due to the internal non-conservative forces and postulated as an absolutely
continuous function of mass, having the form (
e is the unit internal energy, an objective
quantity too)
int
() d (;)(;)d
D
ES em tetV
ω
μ==
∫∫∫ ∫∫∫
rr ,
(12.1.26)
while
dW is an elementary work of non-mechanical and non-calorical nature (e.g., of
electromagnetic nature); the sum
int
ETVE=++ is called total energy. In case of a
continuous mechanical system
S, adiabatically non-isolated, the quantity of energy
may be increased by a flux of heat d
Q, even without the intervention of an external
mechanical work (if the mechanical system
S is adiabatically isolated, then we have
d0
Q = ); we can express d/dQt as a sum of a function q, absolutely continuous of
area (an action of contact, due to the phenomenon of conduction), and a function
r,
absolutely continuous of volume (an action at distance, due to the phenomenon of
radiation or due to thermal sources)
d
(,;)d (;)(;)d
d
DD
Q
qtS trtV
t
μ
∂
=+
∫∫ ∫∫∫
nr r r ,
(12.1.27)
where
r is a unit quantity (with respect to the unit mass), while q is a quantity given by
(,;) (;)qt t=− ⋅nr n qr ,
(12.1.27')
q being the heat current density vector (the sign − puts in evidence the internal normal,
corresponding to the heat received). The relation (12.1.27') represents the Fourier-
Stokes principle of heat flux, corresponding to the basic theorem of Cauchy. The
elementary work of the forces which act upon the subsystem
S ⊂ S , in the actual
configuration at the moment
t, is expressed in the form
91
12 Dynamics of Continuous Mechanical Systems
d(,;)dd(;)(;)dd
DD
WtSttVμ
∂
=⋅+ ⋅
∫∫ ∫∫∫
pnr r r Fr r ,
(12.1.28)
the power of those forces being given by
d
(,;) (;)d (;)(;) (;)d
d
DD
W
PttStttV
t
μ
∂
== ⋅ + ⋅
∫∫ ∫∫∫
pnr vr r Fr vr .
(12.1.28')
Analogously, the power of actions of non-mechanical and non-calorical nature will be
d
d
W
P
t
=
.
(12.1.29)
The principle of energy variation can be written in the form
int
d( )
d
d
dd d
TV
E
Q
PP
tt t
+
+=++
, D∀⊂D ,
(12.1.24')
corresponding to the first principle of thermodynamics (12.1.24). Taking into account
(12.1.25) and (12.1.28'), as well as the differentiation formula (12.1.10'), we can write
this principle in the form
int
d
d
dd
dd
DD
E
V
VS
tt
μ
∂
⋅++ = ⋅
∫∫∫ ∫∫
vv pv
d
d
d
D
Q
VP
t
μ+⋅++
∫∫∫
Fv , D∀⊂D .
(12.1.24'')
Putting the condition that the principle of energy variation be invariant to rigid
displacements, A.E. Green and R.S. Rivlin have shown that, starting from this principle,
one can obtain the principle of torsor variation. For instance, if the relation (12.1.24'')
takes place for any field of velocities, hence for the field of velocities
+vc
,
const=
J
JJJJG
c , too, then we may write
int
d
d
()d ()d
dd
DD
E
V
VS
tt
μ
∂
+⋅ + + = ⋅+
∫∫∫ ∫∫
vcv pvc
d
()d
d
D
Q
VP
t
μ+⋅+++
∫∫∫
Fvc , D∀⊂D ;
taking into account (12.1.24''), there results
()
dd d0
DDD
VS Vμμ
∂
⋅−− =
∫∫∫ ∫∫ ∫∫∫
cv p F, D∀⊂D .
But the velocity
c is arbitrary, hence the parenthesis vanishes; thus, we find again the
principle of variation of the dynamic resultant, equivalent to the principle of variation
of momentum.
Assuming that the mechanical system
S is adiabatically isolated ( d/d 0Qt= ) and
that the power
P vanishes ( 0P = ), we write the power P in the form (we take into
92
MECHANICAL SYSTEMS, CLASSICAL MODELS