Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

()
2
d
d
dd
dd
C
CC
I
F
sF s
tt
λλ
λ
∂∂
⋅
∂∂
=+
∂
∂
∫∫
rv
r
.
(12.2.5')
The principle of mass conservation is written in the form (the material line
PP
′′′
is a
subsystem of the continuous mechanical system
01
PP, its extremities being specified
by the values
λ
′
and λ
′′
of the parameter λ)
00 0
(;)d ( ; )dst s s t s
λλ
λλ
μμ
′′ ′′
′′
=
∫∫
,
where the elements of arc are given by
dds λ
λ
∂
=
∂
r
,
0
0
dds λ
λ
∂
=
∂
r
;
(12.2.3')
the relation must take place for any
λ
′
and
λ
′′
, so that one obtains the continuity
condition of d’Alembert in the form
0
0
(;) ()tμλ μ λ
λλ
∂
∂
=
∂∂
r
r
,
00
() (; )tμλ μλ=
(12.2.6)
or in the form
00
(;)d ( )dst s s sμμ= ,
000
() (;)sstμμ= .
(12.2.6')
One can write this principle in the form
d
(;)d 0
d
st s
t
λ
λ
μ
′′
′
=
∫
too; applying the formula (12.2.5') and noting that the limits
λ
′
and
λ
′′
are arbitrary, it
results the condition of continuity
()
2
(;)
(;) 0
t
t
t
μλ
μλ
λλλ
∂
∂∂∂
+⋅=
∂∂ ∂∂
rrv
,
(12.2.6'')
corresponding to the continuity condition of Euler (1.1.79). These conditions of
continuity are, obviously, equivalent.
Taking
(;) (;)(;)Ft t tΦλ μλ=r , applying the formula (12.2.5') and taking into
account (12.2.6''), we get
d
(;)(;)d d
d
CC
tts s
tt
Φ
Φλ μλ μ
∂
=
∂
∫∫
;
(12.2.7)
103
12 Dynamics of Continuous Mechanical Systems
analogously, we have
d
(;)(;)d d
d
CC
tts s
tt
Φ
Φμλ μ
∂
=
∂
∫∫
r ,
(12.2.7')
as well as
d
(;)(;)d d
d
CC
tts s
tt
μλ μ
∂
=
∂
∫∫
r
Ψ
Ψ ,
(12.2.7'')
d
(;)(;)d d
d
CC
tts s
tt
λμλ μ
∂
=
∂
∫∫
Ψ
Ψ
.
(12.2.7''')
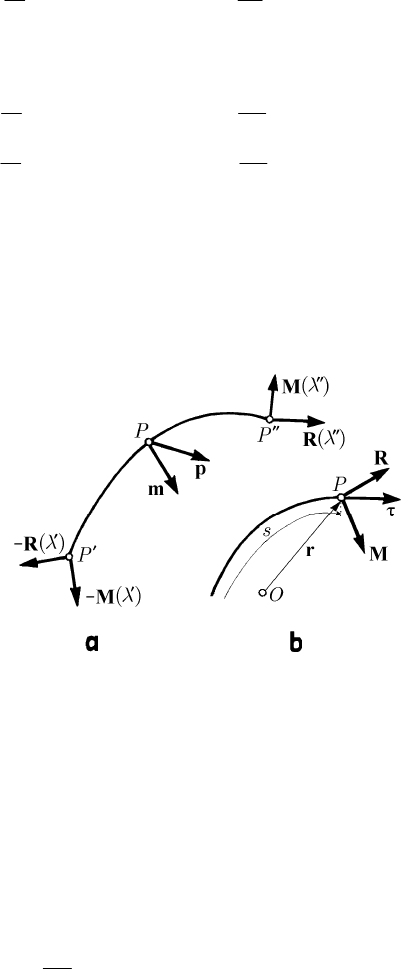
Upon the material arc
PP
′′′
in the actual state (at the moment t) there are exerted
actions at distance (volume forces
()dsλp and volume moments ()dsλm ; in case of
deformable solids it is convenient to report these quantities to the unity of volume) on
all its length and actions of contact (the resultants
()λ
′
−R and ()λ
′′
R and the
resultant moments
()λ
′
−M and ()λ
′′
M ) at its extremities (Fig. 12.5a).
Fig. 12.5 Dynamic equilibrium of a material arc
′′′
PP (a).
Efforts on a cross section (b)
The momentum and the moment of momentum with respect to a fixed pole
O are
given by
′′
′
=
∫
Hv(;)dts
λ
λ
μλ
,
[]
′′
′
=×
∫
Krv(;)d
O
ts
λ
λ
μλ
.
The principle of variation of momentum and the principle of variation of moment of
momentum allow to write
′′
′
′′ ′
=+−
∫
H
pRR
d
()d ( ) ( )
d
s
t
λ
λ
λλλ,
104
MECHANICAL SYSTEMS, CLASSICAL MODELS
′′
′
′′ ′′ ′ ′
=×+×−×
∫
K
rp r R r R
d
() ()d ( ) ( ) ( ) ( )
d
O
s
t
λ
λ
λλ λ λ λ λ
′′
′
′′ ′
++−
∫
mMM()d ( ) ( )s
λ
λ
λλλ.
Eventual concentrated forces or moments acting along the material arc
PP
′′′
can be
contained in
()dsλp and ()dsλm ; but these quantities must be, in this case,
represented by distributions. Taking into account (12.2.7''') and observing that
() () d
λ
λ
λλ λ
λ
′′
′
∂
′′ ′
−=
∂
∫
R
RR
,
() () d
λ
λ
λλ λ
λ
′′
′
∂
′′ ′
−=
∂
∫
M
MM
,
() () () () ( )d
λ
λ
λλλλ λ
λ
′′
′
∂
′′ ′′ ′ ′
×−×= ×
∂
∫
rRrR rR,
we obtain
()
d0s
ts
λ
λ
λ
μ
λ
′′
′
∂∂∂
−− =
∂∂∂
∫
vR
p
,
()
dd
() () d0
dd
s
tss
λ
λ
λλ
μλ
λλ
′′
′
∂∂ ∂
⎡⎤
×−−× −− =
⎢⎥
∂∂ ∂
⎣⎦
∫
vM
rprRm
.
Because the limits
λ
′
and λ
′′
are arbitrary, we can write
st
μμ
∂∂
+= =
∂∂
Rv
pa
,
(12.2.8)
as well as
()
tss s
μ
∂∂∂ ∂
×−−−×−−=
∂∂∂ ∂
vRr M
rp Rm0
;
taking into account (12.2.8), we get the second equation of motion (
/ s=∂ ∂rτ is the
unit vector of the tangent to the material curve
()Ct (Fig.12.5b))
s
∂
+× + =
∂
M
Rm0τ
.
(12.2.8')
In the static case, we find again the equations (4.2.36) corresponding to a curved bar
(one-dimensional continuous mechanical system). We notice that, in the dynamic case,
we use the partial derivative with respect to the curvilinear co-ordinate
s, because the
considered quantities depend on the temporal variable
t too, e.g., (;)st=rr . The
condition of continuity (12.2.6'') must also be associated to these equations.
105
12 Dynamics of Continuous Mechanical Systems
12.2.1.2 Equations of Motion of Threads
A thread will be modelled by its axis; thus, the points of application of the external
forces as well as those of the efforts are situated on the same axis. If, in the equations of
motion (12.2.8), (12.2.8'), we neglect the concentrated moments
M and the external
loads given by distributed moments
m (the thread being perfect flexible and
torsionable), then we can express these equations in the form
(;)
(;) (;)
st
st st
st
μ
∂
∂
+=
∂∂
R
pv
, (;) (;)st st×=R0τ ,
(12.2.9)
where
(;)stp is the external load (distributed on the unit length of the thread), applied
at the point of curvilinear abscissa
s at the moment t, while (;)stR is the resultant of
the efforts on the corresponding cross section. Taking into account the second equation
(12.2.9) (corresponding to the chosen model for the thread),
(;)stR is reduced to the
axial force
(;)stT of traction (the tension (;)stT along the direction of the unit vector
τ, tangent to the thread (see Fig. 4.47 too)) and we can state
Theorem 12.2.1 At any point of a perfect flexible and torsionable thread, in any of its
configurations, the tension is tangent to the curve occupied by the thread.
The equation of motion is reduced to
(;)
(;) (;)
st
st st
st
μ
∂
∂
+=
∂∂
T
pv
.
(12.2.10)
Noting that
(;) (;)(;)st T st st=T τ , (;) 0Tst ≥ , is the tension in the thread at the
cross section of curvilinear co-ordinate
s, it results
(;)
(;) (;) (;)
st
Tst st st
ss t
μ
∂
∂∂
⎛⎞
+=
⎜⎟
∂∂ ∂
⎝⎠
r
pv
;
(12.2.10')
in Frenet’s frame, the equations have the form
T
pv
s
τ
μ
∂
+=
∂
,
2
T
pv
ν
μ
ρρ
+=
, 0p
β
= .
(12.2.10'')
The third equation (12.2.10'') shows that, to have dynamic equilibrium at any point of
the thread, the external force
p must be contained in the corresponding osculating plane
(in other words, the osculating plane to the deformed configuration of the thread
contains, at any moment, the support of the external force
p).
Finally, the equations
2
2
1
T
t
λ
μ
λ
λλ
∂
⎛⎞
⎜⎟
∂∂
∂
=+
⎜⎟
∂∂
∂
∂
⎜⎟
∂∂
⎝⎠
r
r
p
rr
,
(12.2.11)
106
MECHANICAL SYSTEMS, CLASSICAL MODELS
()
2
2
0
tt
μ
μ
λλλ
∂
∂∂∂
+⋅ =
∂∂ ∂ ∂∂
rrr
,
(12.2.11')
constitute a system of four scalar equations with partial derivatives for five unknown
functions:
(;)TT tλ= , (;)tμμλ= and (;)
ii
xxtλ= ,
1,2, 3
i =
. To solve the
problem, it is necessary to associate a fifth equation, corresponding to the constitutive
law of the material.
The curvilinear abscissa of the particle individualized by the parameter
λ on the
curve
()Ct at the moment t is given by
0
(;) dst
λ
λ
λλ
λ
∂
=
∂
∫
r
;
at the same moment
t, we have
(;)
dd
t
s
λ
λ
λ
∂
=
∂
r
,
while for the moment
dtt+ we can write
(; d) (;)
ddddd
tt t
sst
t
λλ
λλ
λλ
∂+ ∂
∂
′
==+
∂∂∂
rr
,
neglecting the terms of higher order. The variation of the linear strain in the time
interval d
t is written in the form
(;)
(;)
dd d
dd
dd
(;)
t
t
t
ss
tt
st s
t
λ
λ
λ
λ
λ
λ
λ
∂
∂
∂∂
∂
′
−∂
==
∂∂
∂
∂
r
r
r
.
The velocity of strain is given by (
(;)tεελ= is the linear strain; see the formula
(12.1.30'))
() ()
2
22
tλλ λλ
ε
λλ
∂∂ ∂∂
⋅⋅
∂∂∂ ∂∂
==
∂∂
∂∂
rr rv
rr
;
(12.2.12)
in this case, the condition of continuity (12.2.11') can be written in the form
0μμε+=
, (12.2.12')
so that
107
12 Dynamics of Continuous Mechanical Systems
ln Cεμ+=, e C
ε
μ = ,
(12.2.12'')
where
,CC are constant with respect to time. An elastic constitutive law is of the form
()TTε= ;
(12.2.13)
in particular, if
Tkε= , constk = , (12.2.13')
then the constitutive law is linearly elastic.
In the case in which
0ε =
, hence if ε is constant in time (the tension T has the same
property), then from (12.2.12') it results
0
(;) (; ) ()ttμλ μλ μλ== too, the thread
being, in general, non-homogeneous; if the thread is homogeneous, then we have
0
() () constμλ μ λ==. From (12.2.1) one obtains
(;)
const
tλ
λ
∂
=
∂
r
.
(12.2.14)
If in the motion of the thread we have
0
(;) (; ) ()st st sλλ λ==, then we can take as
parameter on the curve
()Ct the curvilinear abscissa s (instead of λ). If, in particular,
0ε = , then the thread is inextensible.
The motion of a perfect flexible and torsionable thread is thus governed by the
equation (taking into account (12.1.3'))
()
2
2
(;)
()
st
sT
sss
t
μ
∂
∂∂∂
=+ =+
∂∂∂
∂
u
Tr
pp
,
(12.2.15)
which, in projection on the three co-ordinate axes, leads to
2
2
(;) (;)
()
ii
i
ust xst
spT
ss
t
μ
∂∂
∂
⎛⎞
=+
⎜⎟
∂∂
∂
⎝⎠
, 1, 2,3i = .
(12.2.15')
To this equation is associated the condition of continuity, which, for
0ε =
, is of the
form
(;)
1
st
s
∂
=
∂
r
.
(12.2.15'')
One can thus determine the four unknown functions
(;)TTst= and (;)
ii
xxst= ,
1,2, 3
i = ; the linear density is, in this case, a given function.
If the thread is subjected to constraints, the influence of the constraint forces is added
too; if the thread is constrained to stay on a surface, then to the distributed force
p is
added a distributed constraint force
R, which must be determined. In Chap. 4,
108
MECHANICAL SYSTEMS, CLASSICAL MODELS
Sect. 2.2.4 one has considered the static problem of a thread constrained to stay on a
surface, in particular the case in which the thread is situated along the directrix of a
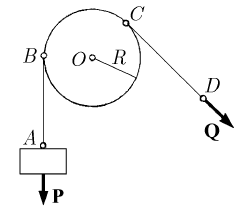
circular cylinder; thus, one can change the direction of a force (Fig. 12.6). As well, a
weight
P can be raised by means of a force Q, so that, in the absence of friction,
QP= (see also the static problem of the pulley in Chap. 4, Sect. 2.1.6); but if the
phenomenon of friction appears too, it is possible to be necessary a force
Q for which
QP
(see Chap. 4, Sect. 2.2.4). In this case, one uses a pulley, hence a cylinder
movable around a horizontal axle. Due to friction, the (perfect flexible) thread abuts on
the cylinder along
BC, moving as a rigid (Fig. 12.6). We assume that the forces P and
Q, applied at A and D, respectively, are constant as direction, the angle
n
BOC being
constant during the motion of the thread (the thread is inextensible and does not slide on
the pulley). We neglect the rolling friction in the bearing of the axle through
O, the
normal constraint forces leading to a vanishing moment with respect to that point. The
velocity of a point of the thread is
Rω, where ω is the angular velocity of rotation; if μ
is the density of the thread, then its moment of momentum is
Fig. 12.6 Change of direction of a force with the aid of a pulley
p
q
p
()
22
ddd
AB BC CD
rsssrmωμ μ μω++ =
∫∫∫
,
where
m is the mass. Applying the theorem of moment of momentum to the system
pulley-thread, we can write
()
2
()
O
Imr QPrω+=−
,
(12.2.16)
where
O
I
is the moment of inertia of the pulley with respect to the axis passing through
O. Neglecting the mass of the thread and its moment of inertia with respect to
O
I , it
results, with a good approximation,
()
O
IQPrω =−
.
(12.2.16')
In case of equilibrium (
0ω = ) or in case of a uniform motion ( 0ω =
) we get QP= ;
we obtain the same result if we assume that also the pulley has a negligible mass, hence
that the moment of inertia
O
I
is very small. The pulley allows thus to change the
109
12 Dynamics of Continuous Mechanical Systems

direction of a force, modifying only a little its intensity. As an illustration of those
results, we mention the Atwood engine, which was considered in Sect. 11.1.2.2.
For a complete formulation of the boundary value problem, one must give also the
initial conditions and the conditions on the frontier. Thus, the initial conditions (at the
moment
0
tt= ) are, in general, of the form
00
(; ) ()st s=rr,
0
0
(;)
()
tt
st
s
t
=
∂
=
∂
r
v
,
[
]
01
,sss∈ ,
(12.2.17)
specifying the position of the thread and the repartition of the velocities at that moment.
In case of a thread of finite length, the conditions on the contour are bilocal conditions.
For instance, one can give the position vectors
00
(;) ()st t=rr,
11
(;) ()st t=rr,
[
]
01
,ttt∈ ,
(12.2.18)
or the velocities
00
(;) ()st t=
rr,
11
(;) ()st t=
rr,
[
]
01
,ttt∈ ,
(12.2.18')
at the extremities of the thread; eventually, one can put mixed bilocal conditions
(position vector at one extremity and velocity at the other extremity) or one extremity or
two extremities can be fixed. As well, one can give the external forces which act at
those points
00
(;) ()st t−=TF,
11
(;) ()st t=TF,
[
]
01
,ttt∈ .
(12.2.18'')
In the absence of the force
p, assuming that
22
() (;)/ 0ssttμ ∂∂≅u , the equation
(12.2.15) takes the form
(;) ()st t=TC, (;) ()Tst Tt= , so that / s∂∂r
()/ ()tTt= C , () 0Tt ≠ ; thus, it results
0
()
(;) ()
()
t
st s t
Tt
=+
C
rC
.
(12.2.19)
If
() 0Tt ≡ , then the thread can take any form at the moment t.
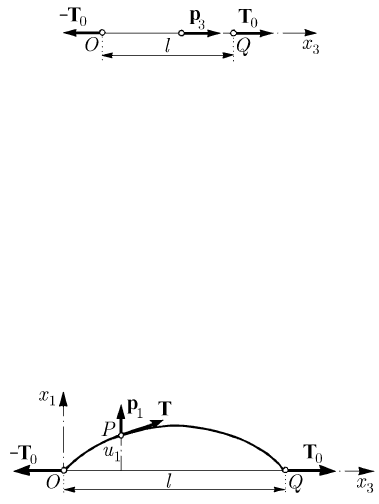
12.2.1.3 Longitudinal and Transverse Vibrations of Threads
Let be a thread stretched between two points
O and Q at a distance l, along the
3
Ox
-
axis, by the action of a static tension
0
T ; we assume that the thread is acted upon by a
longitudinal force
3
p too, of intensity
333
(;)ppxt= (Fig. 12.7). Making 3i = in the
equation (12.2.15') and observing that
3
sx= , we obtain
,3 3 3
Tp uμ+= . (12.2.20)
110
MECHANICAL SYSTEMS, CLASSICAL MODELS
The tension in the thread is given by
033
TT Aσ=+ , where A is the area of the cross
section, while the normal stress
33
σ is linked to the linear strain
33
ε by Hooke’s linear
constitutive law
33 33
Eσε= , where E is the modulus of longitudinal elasticity; we find
thus a linear elastic constitutive law
033
TT EAε=+ , where EA is the rigidity in
traction (longitudinal effort). Taking into account Cauchy’s relation
33 3,3
uε =
(corresponding to (12.1.30')), the equation (12.2.20) of longitudinal vibrations of
threads takes the form
3,33 3 3
EAu p uμ+=
,
(12.2.20')
where the unknown function
333
(;)uuxt= is the displacement component along the
3
Ox -axis. The boundary conditions are conditions on the contour and initial conditions.
In our case, the conditions on the contour are bilocal conditions of the form (thread with
fixed extremities)
Fig. 12.7 Longitudinal vibrations of threads
33
(0; ) ( ; ) 0utult==,
0
tt≥ ,
(12.2.21)
while the initial conditions are of Cauchy type
0
33 33
(;0) ()ux ux= ,
0
33 33
(;0) ()ux ux=
(12.2.21')
for
[
]
3
0,xl∈ . In case of a thread of infinite length, we put analogous conditions at
infinity, the initial conditions being of the same form for
3
x−∞ < < ∞ . Obviously, we
can imagine also other bilocal conditions for a thread of finite length (e.g., imposed
displacements or given tensions, depending on time).
Fig. 12.8 Transverse vibrations of threads
Let us consider also a thread stretched between the points
O and Q by the action of a
static tension
0
T , acted upon by a transverse force
1
p , of intensity
13
(;)pxt, in the
plane
13
Ox x (Fig. 12.8); in this case, taking into account that the force
1
p must be
contained at each point of the thread in the osculating plane, it results that the actual
configuration of the thread is contained in the same plane. The relation (12.1.3) allows
111
12 Dynamics of Continuous Mechanical Systems

to write
0
111
xxu=+, where
113
(;)uuxt= is the displacement component along the
direction of the
1
Ox -axis; because
0
1
0x = , corresponding to a point of the non-
deformed thread (along the
3
Ox -axis), it results
11
xu= . The equation (12.2.15') is
thus written in the form
1
11
u
Tpu
ss
μ
∂
∂
⎛⎞
+=
⎜⎟
∂∂
⎝⎠
(12.2.22)
for
1i =
. Taking into account the relation
330
/Tx s T T∂∂==, as well as
3
/1xs∂∂≅ in case of small deformations, we can assume that
0
constTT≅=
; on
the other hand, we notice that
()( )
33 3
// //sxxsx∂∂=∂∂ ∂ ∂ ≅∂∂ , according to the
same linear approximation. The equation (12.2.22) of the transverse vibrations of
threads will be of the form
01,33 1 1
Tu p uμ+= . (12.2.22')
The contour (bilocal) conditions are, in general, of the form
11
(0; ) ( ; ) 0utult==,
0
tt≥ ,
(12.2.23)
while the initial conditions (of Cauchy type) read
0
13 1 3
(;0) ()ux u x= ,
0
13 1 3
(;0) ()ux u x=
,
[
]
3
0,xl∈ .
(12.2.23')
As well, we can write the transverse vibrations equation of threads in the plane
23
Ox x
in the form
02,33 2 2
Tu p uμ+= , (12.2.24)
and the boundary conditions are analogously put.
We notice that the equations (12.2.20') and (12.2.22') have the same form. Referring,
for instance, only to the equation (12.2.22') we obtain, in absence of external forces,
d’Alembert’s equation of the vibrating string (the homogeneous equation)
1,33 1
2
1
0
uu
c
−=
,
0
2
T
c
μ
= .
(12.2.25)
We assume firstly that the thread is of infinite length, the initial conditions being of
the form (12.2.23') for
3
x−∞ < < ∞ . By means of Heaviside’s function ()tθ , we
introduce the positive part of the function
13
(;)uxt in the form
13 13
13
0 for 0,
(;) (;)()
(;) for 0.
t
uxt uxt t
uxt t
θ
<
⎧
⎪
==
⎨
≥
⎪
⎩
(12.2.26)
112
MECHANICAL SYSTEMS, CLASSICAL MODELS