Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


{
}
τ=PP 0,
ij ji
O
.
(13.1.2')
Before passing to limit in the formula (10.1.40), we can write the relation
corresponding to a mean percussion in the form
′′
′
=
∫
PF()d
t
m
t
tt;
(13.1.3)
if
F
m
is the mean percussive force in the percussion interval, then we have
′′ ′
=−=ΔPF F()
mm m
tt t.
(13.1.3')
Assuming that, till the moment
[
]
′′′
∈
0
,ttt takes place a compression phase (in the
interval
[
′
0
,t t ), a relaxation phase being then developed in the interval
]
′′
0
,tt , we
can define the corresponding mean percussions
′
=
∫
PF
0
()d
t
cm
t
tt,
′′
=
∫
PF
0
()d
t
rm
t
tt
,
(13.1.4)
with the obvious relation
=+PP P
mcmrm
. (13.1.4')
Passing to limit in the sense of the theory of distributions (
F is a generalized force in the
sense defined in Chap. 10, Sect. 1.1.2), we obtain
′
′
−→+
=
∫
PF
0
0
00
lim ( )d
t
c
t
tt
tt,
′′
′′
−→+
=
∫
PF
0
0
00
lim ( )d
t
r
t
tt
tt
,
(13.1.5)
with the relation
=+PP P
cr
. (13.1.5')
Together with the generalized force
F(t ) appears Dirac’s distribution too, so that we
can write
=−FP
0
() ( )tttδ ,
(13.1.6)
justifying thus the denomination of shock given to the respective phenomenon; the
percussive forces
F(t ) are thus temporal distributions.
In case of ideal constraints, the constraint percussions
P
Rn
are normal to the surface
elements of contact, while, in case of constraints with friction, the percussions have not
only a normal component
P
Rn
but also a tangential one P
Rt
, collinear with the sliding
velocity and opposite to the latter one; we can assume the Coulombian law
≤PP
Rt Rn
f
, f being a coefficient of sliding friction. The dimensional equation of
the percussion is
[]
−
==
1
FT LMTP .
13 Other Considerations on Dynamics of Mechanical Systems
133
] [

MECHANICAL SYSTEMS, CLASSICAL MODELS
We notice that the phenomenon of collision is characterized by the relative velocity
of two bodies and not by the absolute velocity of each one. If the support of the relative
velocity with which a body strikes another body (the collision line) is normal to the
surface of the latter one, then the collision is normal, while, otherwise, it is oblique (in
fact, the component of the relative velocity along the collision line intervenes); as well,
if the support of this velocity passes through the mass centre, then the collision is
central. For instance, the normal collision of two homogeneous spherical balls is a
central one.
For a mathematical modelling of the collision phenomenon, we make some
hypotheses which, taking into account the above considerations and the simplified
model studied, correspond sufficiently well to the physical reality. We assume thus that:
i) The principles of mechanics are applied in the conditions considered in Chap. 10,
Sect. 1.1.2; especially, the second principle of mechanics is applied in the form
(1.1.89), the differentiation being in the sense of the theory of distributions, using
generalized forces of the form (10.1.5), (10.1.5').
ii) The usual (non-percussive) forces are neglected with respect to the percussive
ones (as it was shown in Chap. 10, Sect. 1.2.3).
iii) It is assumed that, in the interval of percussion, the bodies have not rigid motions
(translation or rotation), but only deformations; the position vectors of the points of
contact are constant in this interval.
It is assumed that, for two given materials, the ratio between the magnitudes of the
normal components of relaxation and compression percussions, respectively, is constant
=
nr
nc
P
k
P
,
(13.1.7)
the constant
k being a restitution coefficient (coefficient of elasticity by collision).
Experimentally, it is seen that
<<01k , the magnitude of the normal collision in the
relaxation phase being smaller than the magnitude corresponding to the compression
phase; the respective collision is called elastic-plastic (natural) collision too. In the
ideal case
= 1k we have =
nr nc
PP, the collision being elastic (e.g., for steel, ivory
etc.), while for
= 0k it results = 0
nr
P and we have to do with a plastic collision (the
bodies, e.g., wax, plasticine, clay etc., remain in contact also after the phenomenon of
collision).
13.1.1.2 Collision Phenomenon in Case of a Single Particle
In case of a particle subjected to collision, the corresponding mathematical model is
based on the hypotheses in the preceding subsection and the fundamental equation
which replaces Newton’s one is the jump relation (10.1.41); the Theorem 10.1.11 of the
momentum may be thus considered as a basic principle. Unlike Newton’s equation,
which is a differential equation, the relation (10.1.41) is an algebraic (finite) relation,
which implies the jump of the momentum (in fact, of the velocity) at the theoretic
moment
0
t of collision and the percussion at that moment. Assuming that the particle is
subjected to constraints too, we can write this relation (or the relation (10.1.43)) in the
form
134
′′ ′
Δ= = −=+
HvvvPP
00
() ( )
R
mm ,
(13.1.8)
where
′
v
is the velocity of the particle before collision,
′′
v
is the velocity of the same
particle after collision, while
P and P
R
are the resultants of the percussions
corresponding to the given and constraint forces, respectively, at the moment
0
t .
Starting from the equation
ddt=rv, taking into account the formula (13.1.8) and
integrating between the limits of the interval of percussion (we use a mean value
formula), we obtain (by
P
c
and P
Rc
and by P
r
and P
Rr
we mean the percussions in
the compression and relaxation phase, respectively, at a moment
t)
′′ ′′
′′ ′
+
⎛⎞
′′ ′ ′
−= = + = +
⎜⎟
⎝⎠
∫∫∫∫
PP
rr v v v v
00
0
ddd d
tttt
c
Rc
tttt
ttt t
m
()
′′
+
⎛⎞
⎡⎤
′′ ′ ′
+− =+ + −
⎜⎟
⎢⎥
⎣⎦
⎝⎠
∫
PP
vvPP
0
0
1
d()
t
r
Rr
cm
Rcm
t
ttt
mm
()
⎡⎤
′′ ′′
+− + −
⎢⎥
⎣⎦
vPP
0
1
()
rm
Rrm
tt
m
;
we thus see that the displacement at the contact zone (the difference
′′ ′
−
rr) is of the
order of magnitude of the collision time. Passing to limit (
′
−→+
0
00tt and
′′
−→+
0
00tt ) and noting that the velocities and the percussions are finite
magnitudes, it results
′′ ′
−→
rr 0
; the hypothesis iii) is thus theoretically justified at
the limit (at the theoretically collision moment).
Analogously, the relation (10.1.42) leads to the relation
()
Δ=×Δ=×+KrHrPP
00 00
() ()
OR
,
(13.1.8')
corresponding to the theorem of the moment of momentum.
Starting from the relations (10.1.45) and (10.1.45'), we obtain the theorem of kinetic
energy in the form (
=
2
00
/2Tmv
,
′′ ′ ′′ ′
Δ=−= −
22
0
() /2 /2TTTmv mv
)
()
′′
Δ+=+
⋅
PP v
00
()
R
TT ,
(13.1.9)
an analogue of the theorem of kinetic energy being given by
()
′
Δ−=+
⋅
PP v
00
()
R
TT .
(13.1.9')
In particular, if
()
′′
+
⋅=
PP v 0
R
, then we obtain Carnot’s theorem in the same form
(10.1.47), while if
()
′
+
⋅=
PP v 0
R
, then an analogue of this theorem is given by
(10.1.47'). As a matter of fact, Carnot’s theorem takes place at the moment of a sudden
apparition of a rigid constraint, corresponding to a plastic collision. As well, starting
from (10.1.48) to (10.1.48'), we can establish Kelvin’s theorem or an analogue of this
theorem, respectively, in the form
13 Other Considerations on Dynamics of Mechanical Systems
135
MECHANICAL SYSTEMS, CLASSICAL MODELS
()
′′′
Δ= + ⋅+
PP v v
0
1
() ( )
2
R
T ,
(13.1.10)
()
=+⋅PP v
00
1
2
R
T .
(13.1.10')
We notice that all the relations obtained above are algebraic (finite) relations, which–
obviously – influence (and simplify, in a great measure) the mathematical character of
the considered problems. Thus, in case of a free particle
P, the velocity
′
v before
collision and the percussion
P which appears in the interval of collision are considered
as known; the velocity of the particle after collision will be given, in this case, by the
relation (13.1.8) with
=P0
R
, in the form
′′ ′
=+
vv P
1
m
.
(13.1.11)
Taking into account (13.1.11), the relations (13.1.10), (13.1.10') have the remarkable
form
′′′
Δ=⋅+ =⋅−
Pv P Pv P
22
0
11
()
22
T
mm
,
(13.1.12)
= P
2
0
1
2
T
m
.
(13.1.12')
Let us suppose now that the particle
P is subjected to a unilateral holonomic (finite),
rheonomous constraint, of the form
≡≥r
123
(;) ( , , ;) 0
f
tfxxxt ;
(13.1.13)
hence, it can be on a surface
S or aside it, so as it was shown in Chap. 3, Sect. 2.2.5. We
consider, at the beginning, that the constraint is weak (it is a strict constraint), the
particle having a free motion given by the equation
=rr()t ,
[
)
∈∞0,t ; let
′
t
be the
smallest positive root of the equation
==rr 0
123
( ( ), ( ), ( ); )xtxtxtt , for which the
particle
P reaches the surface S with the velocity
′
v
. If the particle moves on the uni-
lateral constraint or leaves it at the moment
t, then its velocity must verify the
condition
≥d/d 0
f
t or
⋅+≥vgrad 0
f
f
,
(13.1.14)
corresponding to the results in Chap. 3, Sect. 2.2.5; the inequality appears when the
particle leaves the constraint. The condition verified by the velocity
′
v when the
particle reaches the surface
S is
′
=
=d/d 0
tt
f
t . Let us suppose now that v
0
is thus
that
′
=
<d/d 0
tt
f
t . To put this relation in concordance with the condition (13.1.14),
we must assume that, in the interval of percussion, appears a constraint percussive
136
force, which leads to a constraint percussion
P
R
; thus, arises a jump of the particle
velocity, which – at the end of the percussion interval – will be
′′
v , verifying the
condition (13.1.14). Hence, in the frame of the mathematical model previously set up,
we must have
′
=
<
d
0
d
tt
f
t
,
′′
=
≥
d
0
d
tt
f
t
.
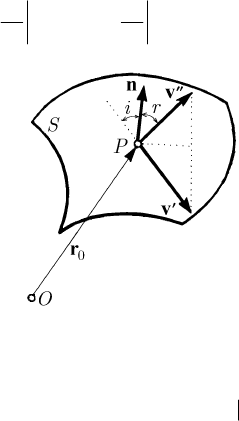
Fig. 13.3 Particle subjected to a unilateral constraint – phenomenon of collision
We can suppose that, at a moment
[
]
′′′
∈
0
,ttt, the particle reaches the surface S,
where it reaches a velocity
v
0
, so that to have
=
=
0
d/d 0
tt
f
t
. The velocity
′
v by
which the particle reaches the surface is called incidental velocity, while the velocity
′′
v by which that one leaves it reflected velocity; the angles formed by these velocities
with the external normal to the surface, of unit vector
n, are the incidental angle i and
the reflected angle
r, respectively (Fig. 13.3). In case of ideal constraints, the constraint
percussion
P
R
is directed along the unit vector n (along grad f ), so that
=Pn
Rn Rn
P
.
The fundamental equation (13.1.8) allows to write
=vn
0
Rn
mP, the variation v
0
of
the velocity taking place along the unit vector
n, in its positive sense; it results that both
velocities
′
v and
′′
v are contained in a plane normal to the surface S, their projections
on the tangent plane being equal
′′ ′
=
sin sinvrvi.
(13.1.15)
The fundamental problem which is put consists in the determination of the reflected
velocity
′′
v
and of the constraint percussion P
Rn
if the incidental velocity
′
v
and the
position of the particle in the interval of collision (given by the position vector
r
0
) are
known. If
′
P
Rn
and
′′
P
Rn
are the constraint percussions corresponding to the first phase
and to the second phase of the collision phenomenon, respectively (in case of a
deformable body, they correspond to the compression phase and to the relaxation phase,
respectively), then we have
′′
−=
vv P
0
()
Rn
m ,
′′ ′′
−=
vv P
0
()
Rn
m ,
(13.1.16)
13 Other Considerations on Dynamics of Mechanical Systems
137
MECHANICAL SYSTEMS, CLASSICAL MODELS
as well as the obvious relation
′′ ′ ′ ′′
−= = +
vv P P P()
Rn Rn Rn
m .
(13.1.16')
The condition
=
=
=
=⋅+=v
0
0
0
0
d/d grad 0
tt
tt
tt
f
tff
can be transcribed also in
one of the forms (we take into account the hypothesis iii)
′
=
′
=
⋅+ =v
0
grad 0
tt
tt
f
f
,
(13.1.17)
′′
=
′′
=
⋅+ =v
0
grad 0
tt
tt
f
f
;
(13.1.17')
the unknown quantities are thus given by the equations (13.1.16) or (13.1.16') and
(13.1.17) or (13.1.17').
In the particular case of a plastic collision (the first phase of the collision
phenomenon), the problem to determine the velocity
v
0
and the constraint percussion
′
P
Rn
with the aid of the first equation (13.1.16) and of the equation (13.1.17) is put; by
eliminating the velocity
v
0
between these equations, one obtains
′′′
===
′
=
′
=
′′
−⋅−=−=⋅=vP
0
d
grad grad grad
d
Rn Rn
tt tt tt
tt
tt
f
mf mf m f fP
t
,
so that
′
=
′
=
′
=
′
=−P
2
d
d
grad
grad
tt
Rn
tt
tt
f
m
t
f
f
,
′
=
′
=
′
=
′
=−vv
0
2
d
d
grad
grad
tt
tt
tt
f
t
f
f
.
(13.1.18)
In general, if the second phase of the collision phenomenon takes place, then one
must determine the quantities
′′
v
and
′′
P
Rn
too, but we dispose only on the second
equation (13.1.16); we must add a supplementary relation of experimental nature to
complete the mathematical model of the collision phenomenon. Newton assumed that
the ratio
′′ ′
/
Rn Rn
PP does not depend on the incidental velocity but only on the physical
properties of the bodies in collision, so that one may write (corresponding to the
relation (13.1.7))
′′ ′
=
Rn Rn
PkP,
(13.1.19)
where
k is the restitution (damping) coefficient; in this case, taking into account
(13.1.16'), we obtain
′
=
′
=
′
=
′
=+ =−+PP
2
d
d
(1 ) (1 ) grad
grad
tt
Rn Rn
tt
tt
f
m
t
kk f
f
,
(13.1.20)
138
′
=
′
=
′
=
′′ ′
=−+vv
2
d
d
(1 ) grad
grad
tt
tt
tt
f
t
kf
f
.
(13.1.20')
Starting from (13.1.16') to (13.1.17'), we get
′′
=
′
=
′
=
′′
=P
2
d
d
grad
grad
tt
Rn
tt
tt
f
m
t
f
f
,
(13.1.20'')
too, so that, together with (13.1.18), (13.1.19), we are led to the remarkable relation
′′ ′
==
=−
dd
dd
tt tt
f
f
k
tt
.
(13.1.21)
If, in particular, the constraint is scleronomic (the surface
S is fixed), then we have
= 0
f
and the relation (13.1.21) becomes
′′ ′
==
′′ ′
⋅=− ⋅vvgrad grad
tt tt
f
kf
or, taking into account Fig. 13.3, has the form (we notice that
()
cos grad cos
tt
f
i
′
=
′
⋅=−v
)
cos cosvrkvi
′′ ′
= ;
(13.1.21')
if we use also the relation (13.1.15), it results, finally,
==
cot tan
cot tan
ri
k
ir
.
(13.1.21'')
With the aid of the first formula (13.1.10), where we make
P = 0, we may write (for
the two phases of the motion)
()
′′′
−= ⋅ +Pvv
00
1
2
Rn
TT ,
()
′′ ′′ ′′
−= ⋅ +Pvv
00
1
2
Rn
TT ,
where
0
T is the kinetic energy at the moment
0
t ; taking into account (13.1.17),
(13.1.17'), we can write
()
′
=
′
=
′
=
′′
==
′′
⎛⎞
′′
−= ⋅ + = −
⎜⎟
⎝⎠
vv
00
d
grad 2
d
2 grad 2 grad
Rn Rn
tt
tt
tt
tt tt
PP
f
TT f f
t
f
f
,
(13.1.22)
()
′
=
′′
=
′′
=
′′
==
′′ ′′
⎛⎞
′′ ′′
−= ⋅ + = −
⎜⎟
⎝⎠
vv
00
d
grad 2
d
2 grad 2 grad
Rn Rn
tt
tt
tt
tt tt
PP
f
TT f f
t
f
f
13 Other Considerations on Dynamics of Mechanical Systems
139
MECHANICAL SYSTEMS, CLASSICAL MODELS
too. If, in the case of scleronomic constraints, we take into account (13.1.18),
(13.1.20''), then we obtain
′
′
−=−
2
0
2
Rn
P
TT
m
,
′′
′′
−=
2
0
2
Rn
P
TT
m
;
(13.1.22')
using also the relations (13.1.19), (13.1.20), it results
()
−
′′ ′ ′ ′′
Δ=−=− − =−
+
22 2
0
111
() 1
221
Rn Rn
k
TTT kP P
mmk
.
(13.1.22'')
A relation of the form (13.1.12'), written for a constraint percussion, allows to write
−
Δ+ =
+
00
1
() 0
1
k
TT
k
,
(13.1.23)
so that we can state
Theorem 13.1.1 (Carnot’s generalized theorem). In the motion of a particle subjected
to collision, due to a holonomic and scleronomic unilateral constraint, the sum of the
variation of the kinetic energy of that particle at the moment of discontinuity and the
kinetic energy of the lost velocity at the same moment, multiplied by the number
−+(1 )/(1 )kk, where k is the restitution coefficient, vanishes.
For
= 1k (elastic collision) we obtain Δ=
0
() 0T , hence
′′ ′
=TT
, so that a loss
of kinetic energy cannot take place, for
0 < k < 1 (elastic-plastic collision) we have
Δ<
0
() 0T (because
>
0
0T
), hence the variation of the kinetic energy is negative. As
a matter of fact, we can replace the notion of variation of the kinetic energy
(
′′ ′
Δ=−
0
()TTT) by the loss of kinetic energy (
′′′
Δ=−Δ=−
0
0
() ()TTTT
), so
that
Δ>
0
() 0T (the loss of kinetic energy is positive, hence the kinetic energy
diminishes) and we may write
−
Δ=
+
0
0
1
()
1
k
TT
k
,
(13.1.23')
corresponding to the generalized theorem of Carnot. Finally, in the limit case of a
plastic collision (
k = 0), we find again the Theorem 10.1.14 in the form (the loss of
kinetic energy is equal to the kinetic energy of the lost velocities)
Δ=
0
0
()TT.
(13.1.23'')
13.1.1.3 Collisions in Case of a Discrete Mechanical System
We consider a discrete mechanical system
S of particles
i
P , i = 1,2,...,n, in an inertial
frame of reference
R, subjected to the action of percussive and non-percussive, given
and constraint, external and internal forces. Corresponding to the hypotheses i) and ii)
of Sect. 11.1.1.1, we will use Newton’s law and will neglect the non-percussive forces
140

with respect to the percussive ones. Assuming that the time interval
[
]
,tt
′′′
contains
only one moment of discontinuity
0
t , so that
′′ ′
−<tt
ε , > 0ε arbitrary, and
passing to limit in the sense of the theory of distributions, as in Chap. 10, Sect. 1.2.3,
the relation (11.1.54) allows to write
′′ ′′
′′
′′ ′
−→+
=
⎡
⎤
Δ= +
⎢
⎥
⎣
⎦
∑
∫∫
HFR
0
00
1
( ) lim ( )d ( )d
n
tt
ii
tt
tt
i
tt tt
,
wherefrom
()
=
Δ= + =+
∑
HPP
0
1
()
n
i
Ri
i
RR
,
(13.1.24)
so that we can state
Theorem 13.1.2 (theorem of momentum). The jump of a momentum of a discrete
mechanical system subjected to constraints, at a moment of discontinuity, is equal to the
resultant of the given and constraint external percussions which act upon that system at
the same moment.
Taking into account (11.1.19), we obtain
Δ=ΔHv
00
() ( )
C
M ,
(13.1.24')
so that we can write the relation (13.1.24) also in the form
()
′′ ′
Δ=Δ= − =+v
C
MMM
RR
ρρρ ,
(13.1.24'')
putting thus in evidence the jump of the velocity of the mass centre and being led to the
Theorem 13.1.2' (theorem of motion of the mass centre). The product of the mass of a
discrete mechanical system subjected to constraints by the jump of the velocity of the
mass centre, at a moment of discontinuity, is equal to the resultant of the given and
constraint external percussions which act upon that system at the same moment.
Hence, the centre of mass of a discrete mechanical system subjected to constraints, at
a moment of discontinuity, moves as a particle at which would be concentrated the
whole mass of the system and which would be acted upon, at that moment, by the
resultant of the given and constraint percussions which act upon that system.
Taking into account the hypothesis iii) in Sect. 11.1.1.1, in conformity to which
=r const
i
in the interval of percussion, and passing to limit, as in the preceding case,
the relation (11.1.54') allows to write
′′ ′′
′′
′′ ′
−→+
=
⎡
⎤
Δ= × +×
⎢
⎥
⎣
⎦
∑
∫∫
KrFrR
0
00
1
( ) lim ( )d ( )d
n
tt
ii i i
O
tt
tt
i
tt tt
′′ ′′
′′
′′ ′
−→+
=
⎡
⎤
=×+
⎢
⎥
⎣
⎦
∑
∫∫
rF R
00
1
lim ( )d ( )d
n
tt
ii i
tt
tt
i
tt tt
,
wherefrom
13 Other Considerations on Dynamics of Mechanical Systems
141

MECHANICAL SYSTEMS, CLASSICAL MODELS
()
=
Δ=×+=+
∑
KrPP
0
1
()
n
ii
ORiOO
i
MM,
(13.1.25)
so that we can state
Theorem 13.1.3 (theorem of moment of momentum). The jump of the moment of
momentum of a discrete mechanical system subjected to constraints, with respect to a
fixed pole, at a moment of discontinuity, is equal to the resultant moment of the given
and constraint external percussions which act upon that system, with respect to the
same pole, at that moment.
As well, the formula (11.1.54'') leads to
{} {}
{
}
Δτ = τ + τHPP
0
()
ii
OOORi
,
(13.1.26)
and we can state
Theorem 13.1.4 (theorem of torsor). The jump of the torsor of a discrete mechanical
system subjected to constraints, with respect to a fixed pole, at a moment of
discontinuity, is equal to the torsor of the given and constraint external percussions
which act upon that system, with respect to the same pole, at that moment.
We notice that the theorem of moment of momentum and the theorem of torsor,
which depend on the fixed pole
O, maintain their form also with respect to another pole
Q, fixed with respect to the frame of reference R. If the pole Q is movable, the
calculation being made with respect to the same frame
R, then we start from the
formula (11.1.23); applying a mean value theorem and observing that under the integral
we have finite quantities, we can write
00
lim () ()d
t
Q
t
tt
ttt
′′
′
′′ ′
−→+
×=
∫
vH 0,
so that
Δ=+K
0
()
QQQ
MM,
(13.1.25')
the theorems of moment of momentum and of torsor maintaining their form with
respect to the movable pole
Q too.
Analogously, starting from the relations (11.1.66''), (11.1.67'') and (11.1.68'), we can
express the theorems of the dynamic resultant, of the dynamic moment and of the
dynamic torsor in the form
Δ=+A
0
() RR,
(13.1.27)
Δ=+D
0
()
OOO
MM,
(13.1.27')
{} {}
{
}
Δτ = τ + τAPP
0
()
ii
OOORi
,
(13.1.27'')
respectively.
Let us suppose now that the frame of reference
R of pole O is a non-inertial one,
having a continuous motion (hence, the components
O
′
v and ω of the finite
142