Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


then we find again Carnot’s generalized theorem, written in the form (10.1.47),
analogue to that in case of plastic collisions; as well, if
()
==
⎡⎤
′
⋅++ + =
⎢⎥
⎣⎦
∑∑
vPP PP 0
11
'
nn
ii
Ri ik Rik
ik
,
(13.1.54')
then we can write an analogue of the generalized theorem of Carnot, in the form
(10.1.47').
Summing the relations (13.1.53) and (13.1.53'), it results
()
()
==
⎡
⎤
′′′
Δ= +⋅++ +
⎢
⎥
⎣
⎦
∑∑
vv PP P P
0
11
1
() '
2
nn
ii i
Ri ik Rik
ik
T
,
(13.1.55)
so that we can state
Theorem 13.1.9 (Kelvin). The variation of the kinetic energy of a discrete mechanical
system subjected to constraints, at a moment of discontinuity, is equal to the sum of the
scalar products of the percussions which act upon the particles by the semisum of their
velocities before and after the phenomenon of discontinuity.
If we subtract the relation (13.1.53') from the relation (13.1.53), then we obtain
()
==
⎡
⎤
=⋅+++
⎢
⎥
⎣
⎦
∑∑
vPP PP
()
0
0
11
1
'
2
nn
i
i
Ri ik Rik
ik
T
(13.1.55')
and we are led to
Theorem 13.1.9' (analogue of Kelvin’s theorem). The kinetic energy of the lost
velocities of a discrete mechanical system subjected to constraints, at a moment of
discontinuity, is equal to the semisum of the scalar products of the percussions which
act upon the particles by the jumps of their velocities at that moment of discontinuity.
Starting from the formula (13.1.8), we can write the relation
+−Δ=PP v 0
iii
Ri
m
, = 1,2,...,in, (13.1.56)
for a particle
i
P ; effecting a scalar product by the virtual displacements δr
i
at the
beginning of the interval of percussion and summing for all the particles of the
mechanical system
S, one obtains a necessary condition to describe the phenomenon of
collision
()
=
−Δ ⋅δ=
∑
Pvr
1
0
n
iii i
i
m
,
(13.1.57)
where we have considered that for the ideal constraints we have
=
⋅δ =
∑
Pr
1
0
n
i
Ri
i
,
(13.1.58)
corresponding to their relation of definition (3.2.36). Assuming that the condition
(13.1.57) is fulfilled and that
p holonomic constraints of the form (3.2.21'') and
13 Other Considerations on Dynamics of Mechanical Systems
153

MECHANICAL SYSTEMS, CLASSICAL MODELS
m non-holonomic constraints of the form (3.2.15) take place, we use the method of
Lagrange’s multipliers; we can thus write
===
′′
==
⎛⎞
−Δ+ ∇ + ⋅δ=
⎜⎟
⎝⎠
∑∑∑
Pv r
111
0
p
nm
iii i i
ll kki
ilk
tt tt
mfλμα
,
where the Lagrange’s multipliers
l
λ , l = 1,2,…,p, and
′′′
=+
kkk
μμμ
,
′
′
=
∫
0
()d
t
kk
t
ttμμ,
′′
′′
=
∫
0
()d
t
kk
t
ttμμ
, = 1,2,...,km,
are non-determinate scalars and where we took into account that in a finite double sum
one can invert the order of summation. As in Sect. 11.1.2.10, we find again the relations
(13.1.56), the constraint percussions being given by
==
′′
==
=∇ +
∑∑
P
11
p
m
i
Ri l l k ki
lk
tt tt
fλμα
, = 1,2,...,in.
(13.1.59)
The relation (13.1.57) becomes a sufficient condition too, and we can state
Theorem 13.1.10 (theorem of virtual work). The motion of a discrete mechanical
system subjected to ideal constraints, in the collision interval, takes place so that the
virtual work of the lost percussions which act upon that system vanishes for any system
of virtual displacements of the respective system.
We have used, in this theorem, the denomination of lost percussion for the difference
−ΔPv
iii
m which equilibrates the constraint percussion P
Ri
(by analogy to the
denomination of lost force of d’Alembert). As in the case of continuous mechanical
phenomena, this theorem can be considered as a principle (the principle of virtual work
or the principle of virtual displacements), because, starting from it, one can solve the
basic problems of the phenomenon of collision.
The equation (13.1.56) with (13.1.59) are Lagrange’s equations of the first kind for
the collision phenomenon.
Introducing the virtual velocities (3.2.1'), we can write the condition (13.1.57) in the
form
()
∗
=
−Δ ⋅ =
∑
Pvv
1
0
n
iiii
i
m
,
(13.1.57')
the considered principle being thus called the principle of virtual velocities too.
In case of a discrete mechanical system subjected to unilateral constraints, we can
express the principle of virtual work in the form
()
=
−Δ ⋅δ≤
∑
Pvr
1
0
n
iii i
i
m
.
(13.1.57'')
It is interesting to notice that the relation (13.1.57) allows to find again the theorems
of Carnot and Kelvin.
154

Starting from the form taken by the general theorems of mechanics in case of the
collision phenomenon, we can state some conservation theorems, particularly useful.
Thus, if
+=0RR
, then it results Δ=H0
0
() , obtaining
Theorem 13.1.11 (conservation theorem of momentum). The momentum of a discrete
mechanical system subjected to constraints is conserved in a collision interval if and
only if the resultant of the given and constraint external percussions which act upon the
system vanishes in that interval.
Analogously, if
+=0
OO
MM , then it results Δ=K0
0
()
O
, and we can state
Theorem 13.1.12 (conservation theorem of moment of momentum). The moment of
momentum of a discrete mechanical system subjected to constraints, with respect to a
given pole, is conserved in a collision interval if and only if the resultant moment of the
given and constraint external percussions which act upon the system, with respect to
the same pole, vanishes in that interval.
Hence, if the given and constraint percussions which act upon a discrete mechanical
system subjected to constraints are equilibrated in their totality in the collision interval
(the mechanical system is considered as non-deformable), then the kinetic torsor of the
system is conserved in that interval.
Assuming that the relation
()
()
==
⎡⎤
′′′
+⋅++ + =
⎢⎥
⎣⎦
∑∑
vv PP P P
11
'0
nn
ii i
Ri ik Rik
ik
(13.1.60)
takes place, the theorem of Kelvin allows to state
Theorem 13.1.13 (conservation theorem of kinetic energy). The kinetic energy of a
discrete mechanical system subjected to constraints is conserved in a collision interval
if and only if the sum of the scalar products of the given and constraint, external and
internal percussions which act upon the particles by the sum of their velocities before
and after a moment of discontinuity vanishes.
From (13.1.23), it results that the relation
Δ=
0
() 0T takes place in case of an
elastic collision (
k = 1). As well, from (13.1.60) we can state that the conservation
Theorem 13.1.13 can be obtained if
′′ ′
=−
vv
ii
, i = 1,2,…,n, or if the given and
constraint, external and internal percussions are equilibrated for each particle of the
mechanical system (considered as non-deformable).
13.1.2 Elastic and Plastic Collisions of Discrete Mechanical Systems
In the following, we consider the general case of elastic and plastic collisions of the
particles, including the problems at the atomic level. The case of plastic collisions is
studied by introducing the space of plastic collisions.
13.1.2.1 Elastic Collisions of Particles. Disintegration and Diffusion of Particles.
Rutherford’s Formula
Let be two particles
1
P and
2
P of masses
1
m and
2
m , respectively, having the
velocities
′
v
1
,
′
v
2
and
′′
v
1
,
′′
v
2
before and after the interaction, respectively (it is
assumed that the particles come from infinite and tend to infinite). In the absence of
13 Other Considerations on Dynamics of Mechanical Systems
155
MECHANICAL SYSTEMS, CLASSICAL MODELS
percussions, we can write a conservation theorem of momentum (corresponding to the
formulae (1.1.26)) and a conservation theorem of kinetic energy in the form
′ ′ ′′ ′′
+=+vvvv
11 22 11 22
mm mm
,
′ ′ ′′ ′′
+=+
22 2 2
11 22 11 22
mv mv mv mv
.
(13.1.61)
We notice that these relations can be written also in the form
()( )
′′ ′ ′′ ′
−+ − =
vv vv 0
11 1 22 2
mm
,
()()()()
′′ ′ ′′ ′ ′′ ′ ′′ ′
−⋅++ −⋅+ =
vv vv vv vv
11 1 1 1 22 2 2 2
0mm
.
Denoting
()()
′′ ′ ′′ ′
=−=−−
uvv vv
11 1 22 2
mmλ
, =u 1 , λ scalar, and introducing the
relative velocities
′′′
=−
vv v
21
,
′′ ′′ ′′
=−
vvv
21
, (13.1.62)
we find
′′′
⋅⋅=uv+uv 0
and
′′ ′
=−
vv u(/ )mλ , where we introduce the reduced
mass
m given by (8.1.14); a scalar product of the latter relation by u leads to
2mλ
′
=⋅uv and
′′ ′ ′
=−
⋅
vv uvu2( ) . The velocities after interaction can be thus
expressed as functions of the velocities before interaction in the form
′′ ′ ′
=+ ⋅vv uvu
11
1
2( )
m
m
,
′′ ′ ′
=− ⋅vv uvu
22
2
2( )
m
m
;
(13.1.63)
as well, we can write
′′′ ′′
=+ ⋅vv uvu
11
1
2( )
m
m
,
′′′ ′′
=− ⋅vv uvu
22
2
2( )
m
m
.
(13.1.63')
In case of the phenomenon of diffraction considered in Chap. 8, Sect. 1.2.1,
=±u versOQ
; assuming that
′
⋅>
uv 0 , we have
′′
⋅=
uv sin( /2)v , where is
the diffraction angle.
The problem considered above is also called the problem of biparticle collision. One
assumes that the two particles are, at the initial moment, at a great distance one of the
other, so that each one of these particles can be considered as being free; if during the
motion the particles become nearer, then interaction forces arise, becoming in real
(collision or capture) or fictitious (diffusion or diffraction) contact. Using the velocity
v
C
of the mass centre (invariant in the collision interval, in conformity to the
conservation theorem of momentum – first relation (13.1.61))
′′ ′′
=+=+vvvHH
11 22 1 2
11
()()
C
mm
MM
,
=+
12
Mm m
,
(13.1.64)
and taking into account (13.1.62), we find
′′
=−vv v
2
1
C
m
M
,
′′
=+
vv v
1
2
C
m
M
,
(13.1.65)
156
′′ ′′
=−vv v
2
1
C
m
M
,
′′ ′′
=+vv v
1
2
C
m
M
.
(13.1.65')
The collision being elastic, the interaction forces are conservative, the potential energy
tending to zero if the distance between the particles tends to infinite (practically, it is
very great), and we can write a conservation theorem of kinetic energy; taking into
account (13.1.65), (13.1.65'), the second relation (13.1.61) takes the form
′′′
+=+
222 2
CC
Mv mv Mv mv , where m is given by (8.1.14). Hence, the relative
velocity is constant in modulus (
′′′
=vv
).
Observing that the considered mechanical system is closed, the centre of mass
C has
a rectilinear and uniform motion with the velocity
v
C
given by (13.1.64) with respect
to an inertial frame of reference; we refer now the motion to an inertial frame
C
R with
respect to which the centre
C is at rest (the frame
C
R of the mass centre), using the
index
C (the origin of the frame can be taken even at C ). Because
′′
=+vv v
1
1CC
,
′′
=+vvv
2
2CC
, we can write
′′
=−Hv
1C
m ,
′′
=Hv
2C
m , where we took into
account (13.1.65'); hence,
′′
=−HH
12CC
and, analogously,
′′ ′′
=−HH
12CC
. Finally,
′′′′′′
===
1122CCCC
HHHH (we have
′′′
=vv
), the four momenta having the same
modulus; moreover, we have
′′′
=
11CC
vv,
′′′
=
22CC
vv. The angle
C
θ between the
momenta
′
H
1C
,
′′
H
1C
of the particle
1
P before and after collision, respectively (the
angle between the directions of motion in
C
R ) is called diffusion angle (Fig. 13.4).
Fig. 13.4 Diffusion angle
In various experiments, one of the particles (e.g., the particle
2
P ) represents the
“target”, being at rest with respect to the measuring devices (with respect to the
laboratory); the frame in which we have
′
=v0
2L
will be called the laboratory frame
(denoted by
L
R ), and the quantities in this frame will be indexed by L. In this case,
from (13.1.64) it results
′
=vv
1
1
(/)
L
C
mM ; observing that
′′
=−=−vvv v
2
2
L
CCC
,
we have
′′ ′
=− =− =vv H H
22
22 1
//
CC C C
mm, so that
⎛⎞
′′ ′
==+
⎜⎟
⎝⎠
HH H
1
1
11
22
1
L
CC
m
M
mm
.
(13.1.66)
13 Other Considerations on Dynamics of Mechanical Systems
157
MECHANICAL SYSTEMS, CLASSICAL MODELS
After collision, we obtain
′′ ′′ ′′ ′
=+=+HvvHH
1
1
1
111
2
()
L
CC C C
m
m
m
,
(13.1.66')
the recoil momentum of the target being (the conservation theorem of momentum in the
frame
L
R )
′′′′′′′′
=−=−HHHHH
211
11
LLL
CC
, (13.1.66'')
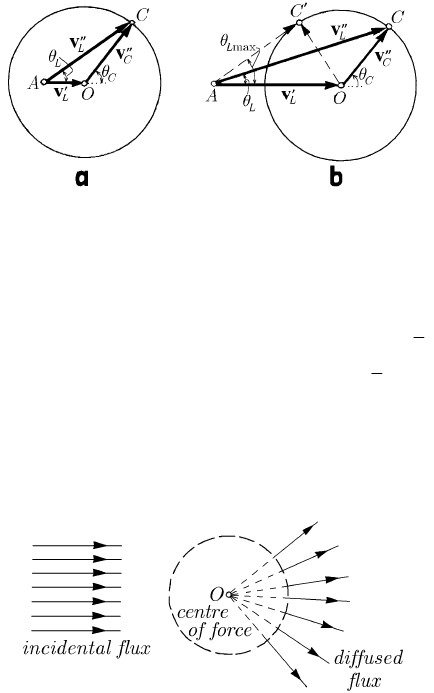
Fig. 13.5 Diffusion angles for: >
12
mm (a), =
12
mm (b), <
12
mm (c)
The relations (13.1.66–13.1.66'') will be geometrically represented in Fig. 13.5a,b,c for
>
12
/1mm , =
12
mm and <
12
/1mm , respectively. We denote
′
= H
1C
OB
,
′′
= H
1C
OC
,
′
= H
12
1
(/)
C
AO m m
and obtain
′
= H
1L
AB
,
′′
= H
1L
AC
,
′′
= H
2L
CB
;
the diffusion angles are
C
θ
and
L
θ
in
C
R and
L
R , respectively, while the diffusion
angle of the particle “target” is given by
=−
2
()/2
L
C
θπθ. Because we can write the
relation
()
=+tan sin / cos
L
CC
OC AO OCθθ θ
, we obtain
==
+
+
2
12
12
sin tan
tan
cos
1( / )sec
CC
L
C
C
m
mm
mm
θθ
θ
θ
θ
.
(13.1.67)
We notice that
[
]
∈ 0,
C
θπ
. If >
12
mm, then the point A is outside the circle C so
that
[
]
∈
max
0,
LL
θθ, where
′
==
21
max
sin / /
L
OC AO m mθ
, <
max
/2
L
θπ
(Fig. 13.5a), while if
<
12
mm (Fig. 13.5c), then the point A is inside the circle C, the
angle of diffusion
L
θ
having the same interval of variation as
C
θ
; if the particles have
equal masses (
=
12
mm), then the point A will be on the circle C, resulting
= /2
L
C
θθ (Fig. 13.5b), hence =
max
/2
L
θπ,
[
]
∈ 0, /2
L
θπ and +=
2
/2
LL
θθ π.
In the latter case, we can write the remarkable relations (
′′′
==
1
1
2
L
C
vvv)
′′ ′
=
1
cos
2
C
L
vv
θ
,
′′ ′
=
2
sin
2
C
L
vv
θ
,
(13.1.68)
and after collision the particles move away under a right angle.
158
To can determine the diffusion angles
C
θ and
L
θ one must know the law of motion
during the collision of the particles as well as their reciprocal position. We have seen
that the angle
L
θ has an upper limit if >
12
mm, while if
12
mm
we obtain
≅
max
0
L
θ , hence ≅ 0
L
θ ; in this case, after collision with the target, the incidental
particle is practically moving along the same initial direction. If
<
12
mm, then the
angle
L
θ can be anyone, depending essentially on the interaction law and on the initial
conditions, while if
12
mm
we have ≅
L
C
θθ, the “target” particle remaining
practically at rest in
L
R . In case of a back diffusion ( =−
L
C
θθπ), it results
′′ ′
=−HH
11CC
, while the relations (13.1.66') and (13.1.66'') lead us to the momenta
()
12
1
1
/1
L
C
mm
′′ ′
=−HH,
′′ ′
=HH
2
1
2
L
C
.
After collision, the kinetic energy of the “target” particle, in the frame
L
R , will be
(Fig. 13.5)
′′ ′′ ′
==HH
2
2
2
22
1
22
12
sin
22
C
LL
C
T
mm
θ
,
(13.1.69)
while if
=
C
θπ
we may write (we use the formula (13.1.66))
′′ ′ ′ ′
== =HH
2
2
2
2max 1 1
1
2
2
2
24
LLL
C
m
m
TT
mM
M
;
(13.1.69')
hence, in case of a back diffusion, the recoil energy (the energy of the “target” particle
after collision) is smaller than (or at the most equal to) the initial kinetic energy of the
incidental particle (which coincides with the initial mechanical energy); indeed,
[
]
=+≤
12 1 2
4/ /( )/2 1mM mm m m . As a matter of fact, this is the maximal
kinetic energy of the “target” particle after collision.
We emphasize that the above results have a general character, non-depending on the
specific interaction law of the two particles. We can thus include in this study also the
case of the “spontaneous” disintegration of a particle in two “fragments” (two particles
which, after disintegration, move independently one of the other). If
′
v
L
is the velocity
of the particle before disintegration and
′′
v
L
and
′′
v
C
are the velocities of one of the
particles resulting from this phenomenon, respectively, then we will have
′′ ′ ′′
=+vvv
LL
C
, so that
′′ ′ ′ ′′ ′′
+− =
22 2
2cos
LL LL L
C
vv vv vθ , where
L
θ is the angle under
which the particle is deviated from the direction of the velocity
′
v
L
. If
′′′
>
L
C
vv, then
[
]
∈
max
0,
LL
θθ, with
′′ ′
=
max
sin /
LL
C
vvθ . In general,
′′
=
′′ ′
+
sin
tan
cos
CC
L
L
CC
v
vv
θ
θ
θ
,
(13.1.70)
wherefrom
′′
=− ± −
′′
′′
2
22
2
cos sin cos 1 sin
LL
LL L
C
C
C
vv
v
v
θθθ θ
;
(13.1.70')
13 Other Considerations on Dynamics of Mechanical Systems
159
MECHANICAL SYSTEMS, CLASSICAL MODELS
if
′′ ′
>
L
C
vv (Fig. 13.6a), then one takes the sign + before the radical (the relation is
univocal), if
′′ ′
<
L
C
vv (Fig. 13.6b), then one can take both signs, two solutions being
possible, while in the limit case
′′ ′
=
L
C
vv it results
′′
=
2
L
C
θθ.
Fig. 13.6 Diffraction angle
In Chap. 8, Sect. 1.2.1, we have considered the problem of deviation of a particle of
mass
m in a field U ( r ) by a fixed centre of force (in the case considered above, it is
situated at the mass centre
C ); the trajectory of the particle is contained between two
asymptotes the angle of which is the diffraction angle
()
=−2πθ∓ (Fig. 8.6), given
by (8.1.17). The parameters which intervene are the velocity
∞
=vv of the incidental
particle at infinity and the collision parameter
b (the distance from the centre of force to
the incidental asymptote of the particle trajectory), the formula (8.1.15) specifying the
constants to be determined. These results complete the problems considered above, by
introducing an interaction law of the two particles (the field
()Ur ).
Fig. 13.7 Phenomenon of diffusion
In general, besides the problem of diffraction (deviation) of a single particle by the
“target”, the problem of diffusion of a great number of particles (flux of particles) by a
centre of force (a field of central forces) is put (Fig. 13.7). Obviously, if the mechanical
phenomenon takes place at an atomic level, then the results which can be obtained in
the frame of a classical model may represent only an approximation (not always the
best one), the quantum effects having an essential importance in this case. Nevertheless,
some results are true, with a good approximation; moreover, the methods used to
describe the diffusion phenomenon are the same in classical as in quantum mechanics.
We will consider an incidental flux of particles which move independently on parallel
rectilinear trajectories, having the same mass
m and the same velocity
∞
v (a
160
homogeneous incidental beam of particles, which can be electrons, particles or celestial
bodies). Passing in the vicinity of the centre of force
O, the particles are influenced by
that one; being diffused with velocities in various directions, but of the same magnitude
(elastic diffusion) and becoming again independent. To this goal, the centre of force
must have a finite radius of action; hence, one must have
≠() 0Ur for <
0
rr and
=() 0Ur for >
0
rr. Practically, it is sufficient to have
→∞
=lim ( ) 0
r
Ur
; in this case,
=−>0ETU because =>0ET at infinity. The trajectories of the particles are
curves symmetric with respect to the straight line which passes through
O and through
the pericentre
P (see Fig. 8.6). The diffusion angle is the angle made by the two
asymptotes of the trajectory and is the same for all the particles which have the same
collision parameter
b. To can evaluate the way in which the particles having a collision
parameter contained in a certain interval are deviated in directions contained, as well, in
a given interval, one defines the efficacious (differential) section of diffusion
dσ in the
form
=
d
d
N
n
σ
,
(13.1.71)
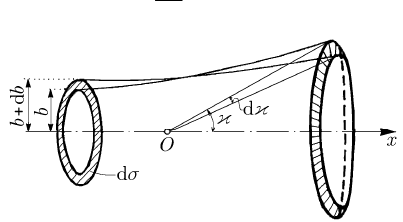
Fig. 13.8 Efficacious section of diffusion
where
dN is the number of particles diffused in the solid angle dω in a unity of time,
while
n is the number of incident particles which cross the unit area in the same time;
this ratio constitutes the most important characteristic of the process of diffusion.
Assuming that between and
b there exists a one-to-one correspondence, hence that
the function
= ()b is a monotone decreasing function, the only particles diffused
in the interval
[
]
+,d
are those the collision parameter of which is contained
between
()b and +() d()bb; the number of these particles will be, obviously,
=d2dNbbnπ , resulting the efficacious section (an annular section, the phenomenon
being with axial symmetry with respect to the
Ox-axis (Fig. 13.8)
=d2dbbσπ
. (13.1.71')
The relation between the efficacious section of diffusion and the diffusion angle (plane
angle) will result in the form
13 Other Considerations on Dynamics of Mechanical Systems
161
MECHANICAL SYSTEMS, CLASSICAL MODELS
=
d( )
d2() d
d
b
bσπ
,
(13.1.71'')
where the derivative is taken in absolute value because, in general, it is negative. With
reference to the element of solid angle
=d2sindωπ, we obtain
== =
22
()d() d () d()
11
dd dd
sin d 2sin d 2
d(cos )
bb b b
σω ωω
.
(13.1.71''')
If the diffusion of the beam of particles is not due to a fixed centre of force and to other
particles which are initially at rest, then it results that the formulae (13.1.71''),
(13.1.71''') take place in the frame
C
R . Passing to the frame
L
R , the efficacious
section
dσ is not modified (it is defined as a ratio of numbers of particles, being
independent of frame), but the element of solid angle is modified, so that
() ()
==
dd
dd d
dd
L
C
CL
σσ
σω ω
ωω
;
(13.1.72)
we notice that
==
d(cos ) d(cos )
d2sind d
d(cos ) d(cos )
LL
L
CC C
CC
ωπ ω
,
(13.1.72')
so that, taking into account (13.1.67) too, we can make a calculus in the frame
L
R .
In the case of a diffusion on the “spherical potential hollow”, for which
≤
⎧
⎪
=
⎨
>
⎪
⎩
0
for ,
()
0 for ,
UrR
Ur
rR
(13.1.73)
where
0
U is a positive constant, we get
=
2
Rσπ
, hence the area of the central section
of the sphere.
In particular, we consider the diffusion of a beam of particles of charge
1
q on the
“target” formed by the particles of charge
2
q , in a potential field (9.2.4), with
12
0
4
qq
k
πε
=
,
(13.1.74)
0
ε being the permittivity of vacuum in a rationalized system. The diffusion angle is
given by
sin( /2) 1/e= , where 1e > is the eccentricity of the trajectory of a
particle of charge
1
q (the trajectories are hyperbolae, as in case of the deviation of the
luminous radius, so that we can use the formula (9.2.27'')). Replacing the constants
C
and
k given by (8.1.15) and (9.2.5), we obtain (vv
∞
= )
2
2
2
1
mv b
e
k
∞
⎛⎞
=+
⎜⎟
⎝⎠
,
162