Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


the initial conditions are put in the form
303
(;0) ()xxϑϑ= ,
303
(;0) ()xxϑϑ=
,
[
]
3
0,xl∈ .
(12.2.46'')
Thus, the study of the boundary value problems is made as in the preceding cases.
2.2.3 Transverse Vibrations of the Straight Bar
In case of a straight bar subjected to bending and shearing in the plane
13
Ox x , due to
an external load
1
0p ≠ , it results
11
0
t
NT M M== = = and we have
221,33
MEIu= , corresponding to the Bernoulli-Euler equation,
311,3
uxu=− and
1,1 2,2
0uu==, corresponding to the hypothesis of plane cross sections of Jacob
Bernoulli (a plane cross section, normal to the bar axis before deformation remains
plane and normal to the deformed axis after application of the external loads; a segment
of a line normal to this axis is not subjected to linear strains); here,
2
EI is the bending
rigidity of the bar,
2
I being the moment of inertia with respect to the
2
Ox -axis (the
neutral axis of the bar). The equation (12.2.41'') becomes
21,3333 1 21,33 1
EI u u I u p
A
μ
μ
+− = .
(12.2.47)
The influence of the term
2
21,33 21,33
(1/ )AIu iu= , where
2
i is the gyration radius with
respect to the
2
Ox -axis, given by a formula of the form (3.1.30'), on the acceleration
1
u
is small; the researches of Rayleigh showed that this term is important only for high
frequencies of the vibrations. We will use thus the simplified equation of the transverse
vibrations of the straight bar
1
2
1,3333 1
p
cu u
μ
+=
,
2
2
EI
c
μ
= ,
(12.2.47')
to which we associate the initial conditions (12.2.23'), together with two other
conditions at the end cross sections of the bar (bilocal conditions). The efforts on an
arbitrary cross section of the bar are given by (the third relation (12.2.41') leads to
2
2 2 1,333 2 1,3
TEIu iuμ=−, so that we make the same approximation as above)
23 21,33
(;)Mxt EIu= ,
23 21,333
(;)Txt EIu= ,
(12.2.47'')
where
113
(;)uuxt= is the solution of the equation (12.2.47'). If the end cross section
3
0x =
is hinged, then it results
1
(0; ) 0ut= ,
221,33
(0; ) (0; ) 0MtEIu t==,
(12.2.48)
if this section is built-in, then we have
1
(0; ) 0ut= ,
1,3
(0; ) 0ut=
(12.2.48')
123
12 Dynamics of Continuous Mechanical Systems
and, finally, if the respective cross section is free, then we put the conditions
221,33
(0; ) (0; ) 0MtEIu t==
,
221,333
(0; ) (0; ) 0TtEIu t==
.
(12.2.48'')
In case of free vibrations of a bar of infinite length one puts only initial conditions of
the form
0
13 1 3
00
lim ( ; ) ( )
t
uxt u x
→+
= ,
0
13 1,333
00
lim ( ; ) ( )
t
uxt cU x
→+
= ,
(12.2.49)
where
c is a constant, while
0
13
()ux and
0
13
()Ux are given distributions, the
differentiation being effected in the sense of the theory of distributions; the equation of
motion will be
2
1,3333 1
0cu u+= , 0t > .
(12.2.49')
To can replace the differential equation (12.2.49') by a differential equation in
distributions, as it was shown by W. Kecs and P.P. Teodorescu, we introduce the
generalized displacement (
()tθ is Heaviside’s distribution)
13 13
(;) ()(;)uxt tuxtθ= ,
(12.2.50)
by a prolongation at left with null values; at the initial moment
0t = appears a
discontinuity of the first kind. Using the formula (1.1.51), we can write
44
13 13
44
33
(;) (;)uxt uxt
xx
∂∂
=
∂∂
,
0
13 13 1 3
(;) (;) ()()uxt uxt ux t
tt
δ
∂∂
=+
∂∂
,
22
00
13 13 1,333 1 3
22
( ;) ( ;) ( )() ( )()uxt uxt cU x t u x t
tt
δδ
∂∂
=+ +
∂∂
,
so that the equation (12.2.49') becomes, in a modified form (we have
22
11
/uut=∂ ∂
and
44
1,3333 1 3
/uux=∂ ∂
for
0t >
),
200
1,3333 3 1 3 1,33 3 1 3
(;) (;) ()() ()()cu x t u x t cU x t u x tδδ+= +
,
(12.2.49'')
which contains the initial conditions too, being written in distributions. To find the
solution of the equation (12.2.49''), we apply the Laplace transform, with respect to the
time variable, and the Fourier transform, with respect to the space variable. We obtain
thus
[
]
[
]
[
]
[
]
24 2
313 13
(i )FL ( ;) FL ( ;)cuxtpuxtα−+
[
]
[
]
20 0
313 13
(i ) F ( ) F ( )cUx p uxα=− + ,
wherefrom
124
MECHANICAL SYSTEMS, CLASSICAL MODELS
[][]
[] []
2
3
00
13 1 3 1 3
242 242
33
FL ( ;) F ( ) F ( )
c
p
uxt u x U x
pc pc
α
αα
=−
++
.
Applying the inverse Laplace transform and taking into account formulae of the form
[]
22
L()cos
p
xx
p
θω
ω
=
+
,
[]
22
L()sinxx
p
ω
θω
ω
=
+
, Re 0p > ,
(12.2.51)
we can write
[
]
[
]
()
[
]
()
0202
13 1 3 3 1 3 3
F(;) F()cos F ()sinuxt u x ct U x ctαα=−.
Applying the inverse Fourier transform to the latter relation, we get
[
]
()
[
]
[
]
()
[
]
10 2 1 0 2
13 1 3 3 1 3 3
(;) F F ()cos F F ()sinuxt u x ct U x ctαα
−−
=−.
Observing that
()
22
33
2
3
Fcos sin 22 cos
44
xx
ct ct
ct ct
πα
⎡⎤
+=
⎢⎥
⎣⎦
,
()
22
33
2
3
Fcos sin 22 sin
44
xx
ct ct
ct ct
πα
⎡⎤
−=
⎢⎥
⎣⎦
and taking into account the formula (A.3.15) concerning the Fourier transform of a
convolution product, in the case in which one of the factors is a temperate distribution,
while the other factor is a distribution with bounded support, we can write the solution
of the problem in the form
22
33
0
13 1 3
1
(;) () cos sin
44
22
xx
uxt ux
ct ct
ct
π
⎡
⎛⎞
=∗+
⎜⎟
⎢
⎣
⎝⎠
22
33
0
13
() cos sin
44
xx
Ux
ct ct
⎛⎞⎤
−∗ −
⎜⎟
⎥
⎝⎠⎦
.
(12.2.52)
If
0
13
()ux and
0
13
()Ux are locally integrable functions, then we have
22
0
13 1 3
1
(;) ( )cos sin
44
22
uxt u x
ct ct
ct
ξξ
ξ
π
∞
−∞
⎡
⎛⎞
=−+
⎜⎟
⎢
⎣
⎝⎠
∫
22
0
13
( ) cos sin d
44
Ux
ct ct
ξξ
ξξ
⎛⎞⎤
−− −
⎜⎟
⎥
⎝⎠⎦
, 0t ≥ ;
(12.2.52')
introducing a new variable
λ by the relation
22
/4ctλξ= , we find again the solution
given by Boussinesq
125
12 Dynamics of Continuous Mechanical Systems
()
()
[
022
13 1 3
1
(;) 2 cos sin
2
uxt u x ct
λλλ
π
∞
−∞
=−+
∫
()
()
]
022
13
2cossindUx ctλλλλ−− −
, 0t ≥ .
(12.2.52'')
In case of a semi-infinite bar (
3
[0, )x ∈∞) with homogeneous initial conditions
(
13
(;0) 0ux = ,
13
(;0) 0ux =
) and for which the displacement
1
(0; ) ( )utut= ,
0t >
, has been imposed, the end cross section being free of stresses (
1,33
(0; ) 0ut= ,
0t > ), we find an analogous solution, given also by Boussinesq ( ()ut is a locally
integrable function)
3
2
22
3
13
2
/2
1
(;) sin cos d
22
2
xct
x
uxt ut
c
λλ
λ
π
λ
∞
⎛⎞
⎛⎞
=−+
⎜⎟
⎜⎟
⎝⎠
⎝⎠
∫
, 0t ≥ .
(12.2.53)
To determine the free vibrations of a bar of finite length
l, we assume that
i
13 3
(;) ()e
t
uxt Ux
ω
= ,
[
]
3
0,xl∈
(12.2.54)
the homogeneous equation (12.2.47') leading to the differential equation
4
,3333
0UUλ−=,
2
4
2
c
ω
λ
= ;
(12.2.54')
on the same way, using the formula (1.1.51), we can write this equation in distributions
in the form (
333
() ()()Ux x Uxθ= )
4
,3333 3 3 ,333 3 ,33 ,3 3
() () (0)() (0)()Ux UxU xU xλδδ−= +
,3 ,33 3 ,333 3
(0) ( ) (0) ( )UxUxδδ++.
(12.2.54'')
Applying the Laplace transform and taking into account the formula (A.3.21), we
obtain
[]
[]
32
3 ,3 ,33 ,333
44
1
L ( ) (0) (0) (0) (0)
Ux pU pU pU U
p λ
=+++
−
,
which leads to
313,323
1
() (0)( ) (0)( )Ux U f x U f x
λλ
λ
=+
,33 3 3 ,333 3
4
23
11
(0) ( ) (0) ( )Ufx U fx
λλ
λλ
++ ,
3
0x ≥ ,
(12.2.55)
where the functions
126
MECHANICAL SYSTEMS, CLASSICAL MODELS

13 3 3
1
( ) (cosh cos )
2
f
xxxλλλ=+,
23 3 3
1
( ) (sinh sin )
2
f
xxxλλλ=+,
33 3 3
1
() (cosh cos)
2
f
xxxλλλ=−,
333
4
1
( ) (sinh sin )
2
f
xxxλλλ=−,
(12.2.56)
verify the relations
1,3 3 3
4
() ()
f
xfxλλλ= ,
2,3 3 1 3
() ()
f
xfxλλλ= ,
3,3 3 2 3
() ()
f
xfxλλλ= ,
333
4,3
() ()
f
xfxλλλ= .
(12.2.56')
Taking into account (12.1.47''), we notice that
(0)U ,
,3
(0)U ,
,33
(0)U and
,333
(0)U ,
hence the quantities which appear in the Cauchy type conditions, are quantities in direct
proportion to the displacement, the rotation, the bending moment and the shearing
force, respectively, at the left end cross section of the bar. As a matter of fact, these
quantities can be easily calculated in any cross section of the bar (
[
]
3
0,xl∀∈ ) in the
form
,3 3 3 ,3 1 3
4
() (0)( ) (0)( )Ux U f x U f xλλ λ=+
,33 2 3 ,333 3 3
2
11
(0) ( ) (0) ( )Ufx U fx
λλ
λ
λ
++ ,
2
,33 3 3 3 ,3 3
4
() (0)( ) (0)( )Ux Ufx U fxλλλ λ=+
,33 1 3 ,333 2 3
1
(0) ( ) (0) ( )Ufx U fx
λλ
λ
++ ,
32
,333 3 2 3 ,3 3 3
() (0)( ) (0)( )Ux Ufx U fxλλλ λ=+
,33 3 ,333 1 3
4
(0) ( ) (0) ( )UfxU fxλλ λ++.
(12.2.55')
Using bilocal conditions of the form (12.2.48 – 12.2.48''), two of the quantities
(0)U ,
,3
(0)U ,
,33
(0)U ,
,333
(0)U are equated to zero, while the relations (12.2.55), (12.2.55')
allow to calculate the other two quantities. One can thus obtain the frequency of the
proper vibrations and their corresponding modes. For instance, in case of a simply
supported bar we impose the conditions
,33 ,33
(0) (0) () () 0UU UlUl====,
wherefrom
,3 2 ,333
4
2
1
(0) ( ) (0) ( ) 0Ufl U fl
λλ
λ
+=
,
,3 ,333 2
4
2
1
(0) ( ) (0) ( ) 0Ufl U fl
λλ
λ
+=
;
this homogeneous system has non-trivial solutions if
22
2
4
() () 0
f
lflλλ−= leading to
sinh sin 0llλλ= or to
n
lnλπ= , n ∈ ` . With the notations (12.2.47'), (12.2.54') we
obtain the proper pulsations
22
2
2
n
EI
n
l
π
ω
μ
= , 1, 2,...n = .
(12.2.57)
127
12 Dynamics of Continuous Mechanical Systems
In this case
[
]
2
,333 2 ,3 ,3
4
(0)/ ( )/ ( ) (0) (0)UflflUUλλλ=− =− , so that the modes of
the proper vibrations are sinusoidal
3,3 3 3
1
() (0)sin sin
nnnn
n
Ux U x C xλλ
λ
==
,
(12.2.57')
where
const
n
C = for a certain mode of vibration. If the bar is built-in at the left end
cross section and simply supported at the right one (complex problem, the bar being
statically indeterminate), we put the conditions
,3
(0) (0) 0UU==,
,33
() ()
0
Ul U l=
=
; we are thus led to the system of homogeneous equations
,33 3 ,333
4
23
11
(0) ( ) (0) ( ) 0Ufl U fl
λλ
λλ
+=,
,33 1 ,333 2
1
(0) ( ) (0) ( ) 0UflU fl
λλ
λ
+=,
which admits non-trivial solutions if
32 1
4
()() ()() 0
f
lf l f lf lλλ λλ−=.
We obtain thus the characteristic equation
tanh tanllλλ= with the roots
1
3.927/lλ = ,
2
7.069/lλ = ,
3
10.210/lλ = ,
4
13.352/lλ = ,
5
16.493/lλ = ; for
5n > we can use the asymptotic formula (4 1) /4
n
nlλπ=+ . The proper pulsations
are thus given by
2
22
nn n
EI
c
ωλ λ
μ
== , 1,2,...n = .
(12.2.58)
The modes of vibrations are
3
333 3
4
4
()
() () ()
()
n
nn n
n
f
l
Ux Cf x f x
fl
λ
λλ
λ
⎡⎤
=−
⎢⎥
⎣⎦
,
(12.2.58')
where
2
,33
(0)/
n
CU λ= for a certain mode of vibration. Other cases of support may be
analogously studied.
Considering also the particular solution of the equation (12.2.47') for
1
0p ≠
, we
obtain results which put in evidence the forced transverse vibrations of the straight bar.
128
MECHANICAL SYSTEMS, CLASSICAL MODELS
Chapter 13
Other Considerations on Dynamics of Mechanical Systems
In this chapter, we consider firstly the case of motions with discontinuity, putting in
evidence the phenomenon of collision in case of a discrete mechanical system. We deal
then with some problems concerning mechanical systems of variable mass.
13.1 Motions with Discontinuity
Using the results obtained in Chap. 5, Sect. 1.2.6 concerning the acceleration of a
particle, its motion with discontinuity has been considered in Chap. 10, Sect. 1; the
results thus obtained have been then applied to the study of the corresponding
phenomenon of collision. The relations of jump which have been put in evidence with
this occasion, as well as the relations of jump presented in Sect. 11.1.2, concerning the
discrete mechanical systems, are also useful in the study of the phenomenon of
collision. Starting from the case of only one particle, we pass to a finite system of
particles, modelling mathematically the phenomenon of collision and presenting the
corresponding general theorems. We make then a general study of elastic collisions,
while for the plastic collisions we introduce a space of plastic collisions.
13.1.1 Phenomenon of Collision in Case of a Discrete
Mechanical System
After some general considerations, we present various aspects of the phenomenon of
collision in case of a single particle; passing to the case of a discrete mechanical system,
a particular attention is given to the general theorems, including the Carnot and Kelvin
ones, as well as the principle of virtual work.
13.1.1.1 General Considerations
In general, during the motion of a mechanical system, the velocity (hence, the
momentum) of each particle has a continuous variation. If in the evolution of these
quantities appear discontinuities, then we say that the mechanical system is subjected to
a shock; the corresponding mechanical phenomenon is called collision. We mention
thus various cases of simple technique: nail beating, modelling by beating with a
hammer etc. or forging, pressing, boring, riveting, beating a pile with a drop hammer
etc., as well as the collision of a car with a wall (the velocity decreases from a finite
value to zero in a very short time). The phenomenon of collision appears also by
applying suddenly a rigid link upon a mechanical system in motion (the velocities and
the momenta have a sudden variation); but a sudden loss of a link does not lead to
129
P.P. Teodorescu, Mechanical Systems, Classical Models,
© Springer Science+Business Media B.V. 2009

MECHANICAL SYSTEMS, CLASSICAL MODELS
130
collision, because the velocities and the momenta have a continuous variation. As well,
the sudden rigid linking of two mechanical systems, one of them being in motion and
the other at rest (the clutch of two mechanisms) is a collision; but the sudden separation
of those mechanical systems (the clutch release of two mechanisms) is a continuous
phenomenon from the point of view of velocities and momenta.
In the frame of the collision phenomenon, in a very short but finite interval of time
[
]
′′′
,tt
, called interval of collision, the velocities of the particles of the (discrete or
continuous) mechanical system have finite variations (in magnitude and direction), their
positions remaining practically unchanged. As a matter of fact, a deformation of the
bodies in collision takes place in case of continuous mechanical systems; this
deformation may be permanent (a plastic one) or not (an elastic one). On the other
hand, during the mechanical phenomenon, a growth of heat takes place, but it will be
neglected in what follows. The fundamental problem consists in the determination of
the velocities of the particles of a mechanical system after collision, assuming that the
corresponding velocities before the phenomenon are known.
In the interval of collision, between the bodies (in general, mechanical systems) in
contact are developed forces, the intensity of which increases quickly, reaching very
great values, and then decreases; under the action of these forces, the bodies are
deformed and we distinguish a compression phase and a relaxation phase, so that the
model of rigid solid is no more sufficient. It is extremely difficult to establish
theoretically or to determine experimentally the variation law of these forces in time.
We are thus led to the notion of percussion, as it was defined in Chap. 10, Sect. 1.2.3,
starting from the notions of generalized force and impulse of the generalized force.
Fig. 13.1 Collision of a heavy body with an elastic spring
(model of a collision phenomenon)
We illustrate the above affirmations, together with R. Voinaroski, considering the
falling along the vertical of a heavy body (modelled as a particle P of mass m), which
comes in contact with a spring vertically guided; the spring is deformed till a position
for which the velocity vanishes and, due to its relaxation, the body is launched up, and
then is separated from the spring. The equation of motion of the particle P in contact
with the spring is
=−mx mg kx
, where > 0k is the elastic constant of the spring,
13 Other Considerations on Dynamics of Mechanical Systems
131
the Ox-axis being directed along the descendent vertical (Fig. 13.1). At the initial
moment
= 0t we impose the conditions =(0) 0x , ==
0
(0) 2xv gh
, h being the
height of free falling of the particle
P. Denoting =
2
/kmω , > 0ω , we obtain
=−+
2
() cos( )
g
xt a tωϕ
ω
, =− −() sin( )vt a tωϕ,
(13.1.1)
where
=+
222
2
1
agvω
ω
,
⎛⎞
=−
⎜⎟
⎝⎠
0
arc tan
v
g
ω
ϕ ;
(13.1.1')
the spring is compressed in the time interval beginning with
=−
00
arctan( / )/tvgωω
till
=
0
() 0xt
, and then it is relaxed till the moment
Δ=
0
2tt
for which Δ=−
0
()vt v,
the jump of the velocity being
Δ= − Δ =
0
(0) ( ) 2vv vt v. The maximal variation of the
position of the contact point between the body and the spring is given by
()
Δ= = + +
222 2
0
() /xxt g g vωω. Let be a helical cylindrical spring of elastic
constant
=⋅
4
310 daN/mk and a particle of mass = 10 kgm , which falls from 1 m
height; it results
−
=⋅
242
310 sω , ≅
0
4.429 m/sv (we have taken =
2
9.81 m/sg ),
Δ≅8.858 m/sv ,
−
≅⋅
3
0
9.142 10 st ,
−
Δ≅ ⋅
2
1.829 10 st ,
Δ≅0.026 mx
,
Δ=Δ= ⋅ = ⋅88.58 kg m/s 8.858 daN sHmv . The maximal intensity of the force by
which the spring acts upon the particle
P is given by =Δ≅
max
780 daNFkx , hence
much greater than the weight
≅ 9.81 daNmg of it. The percussions given by each of
these forces will be
=+ =Δ+Δ
∫
0
00
0
2()d2 2
t
kx t t mv mgt m v mg t
≅+ ⋅= ⋅= ⋅(88.58 1.79) kg m/s 90.37 kg m/s 9.037 daN s ,
==Δ= ⋅= ⋅
∫
0
0
0
2 d 2 1.79 kg m/s 0.179 daN s
t
mg t mgt mg t .
The above case can be considered to be a first modelling of a collision, in which some
aspects of this phenomenon (e.g., the mass of the spring, the variation of the unknown
intensity of the percussive force, modelled as an elastic force, the deformation of the
body modelled as a particle etc.) have been neglected; we mention also that the moment
of detachment of the particle from the spring (in calculation has been considered a
relaxation till the moment Δ
t) has not been specified. As well, replacing the spring by a
damper or by a model formed by a spring and a damper (in parallel or in series), we can
obtain a model closer to the reality for the considered mechanical phenomenon. But we
can obtain thus useful conclusions to set up a mathematical model with a general
character for this phenomenon. We notice thus that
≅0.179/9.037 0.020, hence the
percussion due to usual forces (which act permanently) may be neglected with respect
MECHANICAL SYSTEMS, CLASSICAL MODELS
to the percussion due to the forces which appear only in the interval of percussion (in
the considered case, the usual forces have a contribution of only
2% in what concerns
the percussion). We notice also that the interval of percussion Δ
t is small with respect to
the time in which the mechanical phenomenon takes place and that the displacement Δ
x
can be neglected with respect to the dimensions of the mechanical systems which
intervene; indeed, if we assume, e.g., that the body modelled by the particle
P is of
steel, then its volume would have approximately
3
0.001282 m , so that, for any of its
form, it would have dimensions much greater that Δ
x (moreover, the particle modelling
implies the neglecting of the dimensions of the body, so much the more the neglecting
of the displacement Δ
x).
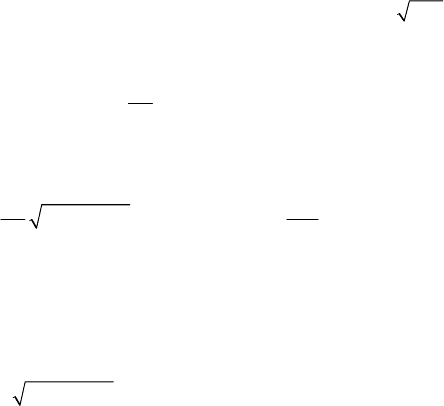
Fig. 13.2 Internal percussions of two particles
The interval of collision is called also interval of percussion. The forces which
appear in the interval of percussion and which have a great intensity (provoking great
variations of the momentum), in a very short interval of time (the percussion interval),
are called percussive forces, the other forces (the weight of bodies, the elastic forces,
the resistance of the air etc.) being usual (non-percussive) forces. Therefore, the
percussive forces as well as the percussion interval are thus difficult to estimate; we can
put better in evidence the mechanical phenomenon with the aid of the percussion
defined by the formula (10.1.40). Thus, the two quantities (a vector and a scalar one), of
very different order of magnitude, are replaced by a vector quantity of a mean order of
magnitude. Because the percussions are obtained starting from the percussive forces,
these ones can be classified analogously. We distinguish thus between given percussive
forces and constraint percussive forces, as well as between external percussive forces
and internal percussive forces. Obviously, in case of a mechanical system, starting from
the internal forces
F
ij
and F
j
i
, which represent the actions of the particles
i
P and
j
P ,
respectively, one upon the other, having as support the straight line
ij
PP and being
linked by the relation (1.1.81), we can define the internal percussions
P
ij
of support
ij
PP (
=P
ij i j
PPλ
, λ scalar) and the internal percussion P
j
i
, respectively, both
percussions being linked by the relation (Fig. 13.2)
+=PP 0
ij ji
; (13.1.2)
corresponding to the relation (2.2.50), the above properties of the internal percussions
(either given or constraint ones) can be expressed in a concise form (the pole
O is
arbitrary)
132