Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

If the relative velocity of the centre of mass
C (with respect to the frame R ) is non-
zero (
C
≠v0
), then the absolute velocity (with respect to the frame
′
R
) of this centre
is given by
CCC
′′
=+vvv
(13.2.5')
so that
()
CC
M
′′
=−Hvv
;
(13.2.6')
it results that the absolute velocity of the centre of mass
C is equal to its relative
velocity if the momentum of the mechanical system
S with respect to the fixed frame
vanishes (
′
=H0
).
We assume, to fix the ideas, that the emission phenomenon of some elements of the
particles
j
P , 1,2,...,jn= , of relative velocities (with respect to these particles)
j
jj
′
=−wuv
, 1,2,...,jn= ,
(13.2.7)
where
j
u are the velocities of these elements with respect to the frame
′
R . In this
case, the equation (10.3.1') allows to write
()
1
d
'
d
n
ii i ii
ik
k
mm
t
=
′
=+ +
∑
vF F u
,
0
i
m <
,
where
i
F is the resultant of the given external forces which are applied upon the
particle
i
P , while
ik
F are the internal forces due to the action of the particles
k
P ;
summing for all the particles of the discrete mechanical system
S and observing that
the resultant of the internal forces vanishes, we obtain
1
n
j
j
j
m
=
′
=+
∑
HR u, 0
j
m <
,
(13.2.8)
stating
Theorem 3.2.1 (theorem of momentum). The derivative with respect to time of the
momentum of a free discrete mechanical system of variable mass (which emits mass),
with respect to an inertial frame of reference, at a given moment, is equal to the sum of
the resultant of the given external forces which act upon that system and the momentum
of the emitted masses in a unity of time, at that moment.
Taking into account (13.2.7), we can write the relation (13.2.8) in the form
1
n
j
j
j
m
=
′′
=++
∑
HR vR , 0
j
m <
,
(13.2.8')
13 Other Considerations on Dynamics of Mechanical Systems
173

MECHANICAL SYSTEMS, CLASSICAL MODELS
too, where
11
()
nn
j
jj jj
jj
mm
==
′
=−=
∑∑
uv wR
, 0
j
m <
,
(13.2.9)
is the resultant of the reactive forces; we mention, as well (for the particles which do
not emit mass we have
0
i
m =
), a theorem of the dynamic resultant in the form
11
nn
ii ii
ii
mm
==
′′ ′
===+
∑∑
AavRR
,
(13.2.8'')
where
′
A
is the dynamic resultant of the discrete mechanical system S.
If the absolute velocities of the emitted elements vanish (
j
=u0, 1,2,...,jn= ),
then the relation (13.2.8) is written in the form
′
=
HR
,
(13.2.8''')
hence in the same form as in case of a discrete mechanical system of constant mass; as
well, if the relative velocities of the emitted elements are zero (
j
=w0,
1,2,...,jn= ), then R = 0, while the relation (13.2.8'') takes the classical form
′
=AR
.
(13.2.8
iv
)
These cases have been considered by T. Levi-Civita.
Taking into account (13.2.4'), we notice that
[]
1
()
n
ii
OC
i
mM M
=
′′ ′
=+×+××=
∑
va aωρ ω ωρ
,
so that
C
M
′
=+aR
R ;
(13.2.10)
we thus state
Theorem 13.2.2 (theorem of motion of the centre of mass). The point which coincides
with the centre of mass of a free discrete mechanical system of variable mass (which
emits mass) moves, at a given moment, with respect to an inertial frame of reference, as
a particle of constant mass, at which would be concentrated the whole mass of the
system at that moment and which would be acted upon by the sum of the resultant of the
given external forces and the resultant of the reactive forces.
This equation takes into account that the centre of mass
C changes the position with
respect to the frame
R, due to the variation of the mass of the mechanical system S. As
a matter of fact, the acceleration
C
′
a
is the transportation acceleration; taking into
account the relative motion, we have
174
2
CCC C
′′
=++×aaa vω
,
(13.2.11)
where
C
a and 2
C
× vω are the relative acceleration and the Coriolis acceleration,
respectively, corresponding to the mass centre
C. We obtain thus the equation
2
CCC
MMM
′
=++ + ×aR a vω
R ,
(13.2.10')
which governs the motion of the mass centre of the discrete mechanical system
S with
respect to an inertial frame of reference.
In case of a discrete mechanical system of variable mass, which captures mass, we
obtain – analogously – a relation of the form (13.2.8), but for which
0
j
m >
, and we
can state a theorem of momentum and a theorem of motion of the mass centre in the
same form. We may develop a unitary theory too, starting from Meshcherskiĭ’s
generalized equation, in the form (10.3.8) or in the form (13.2.1). We find thus the
theorem of momentum
11
nn
j
jjj
jj
mm
−− ++
==
′
=+ +
∑∑
HR u u
,
(13.2.12)
as well as the theorem of the dynamic resultant
1
n
ii
i
m
−
+
=
′′
==++
∑
AvRR R
,
(13.2.12')
where we have introduced the reactive force
11
()
nn
j
jj jj
jj
mm
−− −−
−
==
′
=−=
∑∑
uv wR
(13.2.13)
and the braking force
11
()
nn
j
jj jj
jj
mm
++ ++
+
==
′
=−=
∑∑
uv wR
;
(13.2.13')
the used notations correspond to the previous ones; we suppose that there are
nn≤
particles which emit and capture mass (eventually, some of those particles can only emit
or only capture mass, having
0
j jjj
mmmm
−+
=++,
0
j
m
−
<
,
0
j
m
+
>
, correspond-
ing to the notation (10.3.11)). The theorem of motion of the mass centre becomes
C
M
−
+
′
=+ +aR
RR,
(13.2.12'')
where
M is the mass of the discrete mechanical system S at a given moment.
13 Other Considerations on Dynamics of Mechanical Systems
175
MECHANICAL SYSTEMS, CLASSICAL MODELS
The moment of momentum of the discrete mechanical system
S of variable mass
will be defined in the form
11
() ( )( )
nn
iii i i i
OO
O
ii
mm
′
==
′′′ ′ ′
=× = +×+×
∑∑
Krv rrv rω
,
so that, corresponding to the formula (11.2.16), we obtain
() ()
O
OC O
O
MM
′
′′′ ′
=+× +×KKr v vρ
,
(13.2.14)
where the pseudomoment of momentum
O
K
is given by
1
()
n
O
ii i
O
i
m
=
=××=
∑
KrrIωω
.
If
OC≡
, hence if ρ = 0, then we obtain a formula of Koenig type of the form
(11.2.21). Introducing the frame
R with the axes parallel to those of the frame
′
R ,
we have
O
O
=KK too.
We can write
1
d
() ' ()
d
n
iiiiii iii
ik
k
mm
t
=
′′′′ ′
×=×+×+×
∑
rvrFrFru, 0
i
m <
,
for a particle
i
P , assuming – to fix the ideas – that only a phenomenon of emission
takes place. Summing for all the particles of the discrete mechanical system
S and
observing that the resultant moment of the inertial forces is equal to zero, it results
1
()
n
j
jj
OO
j
m
′′
=
′′
=+ ×
∑
KM r u
, 0
j
m <
,
(13.2.15)
and we can state
Theorem 13.2.3 (theorem of moment of momentum). The derivative with respect to time
of the moment of momentum of a free discrete mechanical system of variable mass
(which emits mass), with respect to a fixed pole, in an inertial frame of reference, at a
given moment, is equal to the sum of the resultant moment of the given external forces
which act upon that system, with respect to the same pole, and the moment of
momentum of the emitted masses in a unity of time at that moment, with respect to the
mentioned pole.
Taking into account (13.2.7), we can also write
1
()
n
j
jj
OOO
j
m
′′′
=
′′′
=++ ×
∑
KM r vM , 0
j
m <
,
(13.2.15')
where
176
1
()
n
j
jj
O
j
m
′
=
′
=×
∑
rwM , 0
j
m <
,
(13.2.16)
is the resultant moment of the reactive forces with respect to the fixed pole
O
′
. If the
absolute velocities of the emitted masses vanish (
j
=u0, j = 1,2,…,n), the relation
(13.2.15) is written in the form
OO
′′
′
=
KM;
(13.2.15'')
hence, in the case considered by Levi-Civita, one obtains the same form as in the case
of a discrete mechanical system of constant mass.
Proceeding as in Sect. 11.2.2.1, we can find for the theorem of moment of momentum
an analogue of the formula (11.2.18), in the form (given by C. Agostinelli)
1
d
()() ()
d
n
j
jj
OOOO
j
Mm
t
=
′′′
×+ =++×
∑
aIM rvρωM , 0
j
m <
.
(13.2.15''')
In case of capture of mass, we obtain the same formulae (13.2.15
−13.2.16), where
0
j
m >
. Analogously, we obtain results corresponding to the generalized equation
(10.3.8) of Meshcherskiĭ.
We notice that we can group the theorem of momentum and the theorem of moment
of momentum, hence the formulae (13.2.8), (13.2.15) in the form of a theorem of
kinetic torsor; thus, it results
{} {} {}
{}
d
d
iiijj
OOOO
m
t
′′′′
τ=τ=τ+τ
HHFu.
(13.2.17)
13.2.1.3 Theorem of Kinetic Energy
The kinetic energy of the discrete mechanical system
S of variable mass is defined in
the form
22
11
11
()
22
nn
ii i
O
ii
Tv m
==
′′ ′
== +×
∑∑
vrω
;
corresponding to the formula (11.2.28), we get
2
1
(,,)
2
O
OO
TT Mv M
′′′
=+ +v ω
ρ
,
(13.2.18)
where the pseudokinetic energy
O
T is given by
2
1
11
() ()
22
n
O
ii
O
i
Tm
=
=×=⋅
∑
rIωωω
.
(13.2.18')
13 Other Considerations on Dynamics of Mechanical Systems
177
MECHANICAL SYSTEMS, CLASSICAL MODELS
If
OC≡ , hence if ρ = 0, then we obtain a formula of Koenig type of the form
(11.2.37). By introducing the frame
R , we may write
O
TT= too.
Starting from the equation of motion of a single particle and effecting a scalar
product by
dd
ii
t
′′
=vr
, we can write
1
d( ) d ' d d
n
iiiii iiii
ik
k
mm
=
′′ ′ ′ ′
⋅ =⋅+ ⋅+ ⋅
∑
vvFrFruv
, 0
i
m <
,
where – to fix the ideas – we have admitted that a phenomenon of emission takes place.
We notice that
()
22
11
d( ) d d
22
iii ii ii
mm m
′′ ′′
⋅= +vv vv
and
22
dd()dd d d
ii i i i i i ii i i i ii i i i
mm mvm mvm
′′′′′′′
⋅= + ⋅= + ⋅= + ⋅
uv w v v wv w r.
Summing for all the particles of the discrete mechanical system
S, it results
2
int
1
1
ddd d d
2
n
j
j
j
TWW W mv
=
′′
=+ + +
∑
R
, 0
j
m <
,
(13.2.19)
where we have introduced the elementary work of the reactive forces in the form
1
d()d
n
j
jj
j
Wm
=
′
=⋅
∑
wr
R
, 0
j
m <
;
(13.2.20)
we state thus
Theorem 13.2.4 (theorem of kinetic energy). The differential of the kinetic energy of a
free discrete mechanical system of variable mass (which emits mass), in an inertial
frame of reference, at a given moment
t, is equal to the sum of the elementary work of
the given external and internal forces which act upon that system, the work of the
reactive forces at the same moment and the kinetic energy of the masses emitted in the
interval of time dt.
The formulae (13.2.19), (13.2.20) hold also in case of capture of mass (we have
0
j
m >
); as well, starting from Meshcherskiĭ’s generalized equation (10.3.8), we
obtain analogous results.
In the particular case considered by Levi-Civita, in which the absolute velocities of
the emitted (or captured) masses vanish (
j
=u0, 1,2,...,jn= ), we can write
2
int int
1
11
ddd d dd d
22
n
j
j
j
TWW W WW m
=
′′
=+ + =+ −
∑
v
R
;
(13.2.19')
178
but if the relative velocities of the emitted masses are null (case considered by Levi-
Civita), then we obtain (we have
d0W =
R
)
2
int
1
1
ddd d
2
n
j
j
j
TWW m
=
′′
=+ +
∑
v .
(13.2.19'')
13.2.2 Applications
In what follows, we deal firstly with the problem of the rocket; we consider then the
problem of
n particles and, in particular, the cases 2n = , and 3n = , including the
problem of motion of an artificial celestial body.
13.2.2.1 The Rocket Problem
In case of a rocket, elements of mass of its body are emitted, hence
0
j
m <
,
1,2,...,jn= ; we assume that the relative velocity
j
w is the same (equal to w) for all
the emitted masses. Among the external forces which act upon the rocket we will render
evident the pressures
p, of resultant
p
R and resultant moment
p
O
M
, exerted on the
walls by the surrounding air. The theorem of motion of the mass centre and the theorem
of moment of momentum are written in the form
[
]
()
p
O
MM
′
+×+× × = + +
aRRwωρ ω ωρ , 0M <
,
(13.2.21)
()
d
()()
d
p
OOO
O
C
MM
t
′
×+ =++×
aIMM wρωρ
()
()
11
()
nn
C
j
jjj
j
jj
mm
==
′′
+×+×
∑∑
rwrv
, 0
j
m <
,
(13.2.21')
where we took into account that
()C
j
j
=+rrρ . The moment of the reactive force with
respect to the mass centre
C of the emitted masses can be neglected, assuming that (the
emitted mass is much smaller than the mass of the rocket)
() ()
1
n
CC
jj
j
C
j
mM
=
==
∑
r0ρ
;
as well, on the basis of the same considerations, we have
()
()
1
n
jjj
C
j
mM
=
′′′′
×=×
∑
rv vρ ,
where
′
v
is the absolute velocity of the rocket. The equation (13.2.21') becomes thus
() ()
d
()()
d
p
OOO
O
CC
MMM
t
′′′
×+ =++×+×
aIMM w vρωρρ.
(13.2.21'')
13 Other Considerations on Dynamics of Mechanical Systems
179
MECHANICAL SYSTEMS, CLASSICAL MODELS
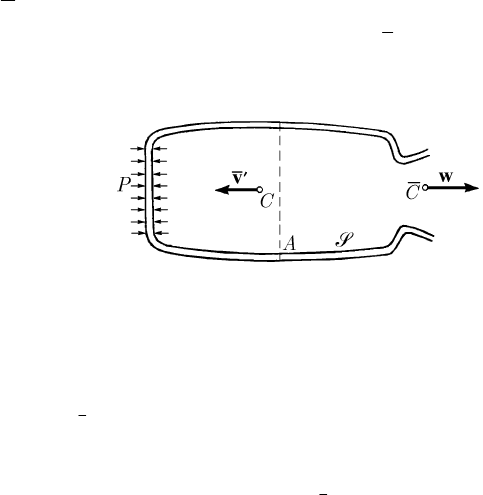
Hence, in the equations of motion of the rocket (the mechanical system
S ) one introduces
the influence of the air pressure and of the reactive force, considered as applied at the mass
centre
C of the emitted masses (Fig. 13.9); in the corresponding equation of the moment
of momentum appears also the moment of the force
M
′
v , with respect to the pole O
′
of
an inertial frame of reference (with respect to which one calculates the acceleration
O
′
a
too and in which the differentiation with respect to time is performed).
Fig. 13.9 Rocket problem
In this problem, the acceleration
()
OO
t
′′
=
aa and the angular velocity ()t=ωω
must be determined, supposing that the law of variation of mass
()MMt= , deduced
from the law of combustion of fuel, is known. Due to the emission of mass, the position
vectors
ρ and
C
ρ
, as well as the moment of inertia tensor
O
I
, are functions of time;
their variation depends on the mass and on the position of the eliminated elements.
Hence, one must assume that the laws of variation of those quantities are given too. In a
first approximation, we can consider that
ρ,
C
ρ
and
O
I are constant quantities, at least
for a short time interval. We mention that the torsor
{
}
,
p
p
O
RM of the hydrodynamic
forces corresponds to the pressure of the air, exerted on the external walls of the rocket
(a mechanical system
S of variable mass immersed in a fluid), as well as to the
pressure of the gases resulting from explosions (on the internal surface of the rocket);
thus, there intervene also problems of dynamics of gases, of thermodynamics and even
of interactions between the rocket and gases. All these aspects complicate much the
problem of the rocket from the mathematical point of view; we assume thus that the
action of the pressure is known in time. In this order of ideas, we consider that the
rocket can be modelled mathematically as a particle of variable mass.
Let be thus a rocket launched at the Earth surface, at the initial moment, the motion
taking place along the local vertical (the
Ox-axis is along the ascendent vertical; see
Fig. 10.22 too). In the active phase (the rocket moves due to the action of the fuel), the
equation (13.2.21) allows to write (the relative velocity
w is directed opposite to the
velocity
v, hence its component along the Ox-axis is −w; the reactive force R has the
same direction as the velocity
v, because 0M <
)
0
()Mv Mw M g vϕ=− −
,
(13.2.22)
where
0
()Mg vϕ is the resistance of the air (corresponding to the pressure) and where
we consider a linear law of variation of mass (
0
(1 )MM tα=−,
constα =
).
180

We assume that
2
() (/)vkgvϕ = , with
0
/
a
kCA Mμ= , where A is the area of the
maximal cross section of the rocket,
0
e
x
aa
β
μμ
−
=
,
0
const
a
μ =
,
constβ =
, is the
unit mass of the air, while
C is a non-dimensional coefficient of resistance. We notice
that
()wuv−=− −, where constu−= is the absolute velocity of gases’ elimination;
the equation (13.2.22) becomes
2
(1 ) e
x
tx x k x u
β
αα α
−
−−+ =
,
(13.2.22')
having a quite complicated non-linear form.
An essential simplification of the problem is obtained by neglecting the resistance of
the air; we find thus again Tsiolkovskiĭ’s first problem (see Chap. 10, Sect. 3.1.4 too),
with the hypothesis
constwuv=−≠ . The equation of motion takes the form
(1 ) ( )tv v uαα−=+
,
(13.2.23)
wherefrom we get
0
()
1
ut
vt v
t
α
α
=+
−
,
(13.2.23')
where
0
(0)vv= is the initial velocity. By a new integration, we can write
(
0
(0)xx= )
00
() ( ) ln(1 )
u
xt x u v t t
α
α
=−− − − .
(13.2.23'')
Another simplification of the problem can be obtained by adjustment of the law of
combustion, so that the rocket have a uniform accelerated motion along the ascendent
vertical; the velocity
v of the mass centre of the rocket will be thus given by
2
0
2vax=
, with the acceleration
0
constva==
. In its motion, the rocket must
overcome the resistance of the air
0
()Mg vϕ and the force of attraction of the Earth
2
/
E
f
Mm r , rRx=+, where
E
m is the Earth’s mass and we have
2
E
f
mgR= , R
being the radius of the Earth, considered to be spherical, while
g is the gravity
acceleration. In this case, the elementary work corresponding to the displacement along
the ascendent vertical is given by
()
2
ded
x
R
WMg Kx x
Rx
β−
⎡ ⎤
=+
⎢ ⎥
+
⎣ ⎦
,
where
0
0
2
a
KaACμ= is a constant. Integrating between the limits 0 and H, we obtain
the work effected by rising the rocket at the height
H in the form
2
1(1 )e
H
MgRH
K
WH
RH
β
β
β
−
=+−−
⎡
⎤
⎣
⎦
+
;
(13.2.24)
13 Other Considerations on Dynamics of Mechanical Systems
181
MECHANICAL SYSTEMS, CLASSICAL MODELS
because we do not know the law of motion
()xxt= (we cannot express the mass as a
function of
x), we will introduce a mean mass
00
MMMM−Δ < < , where 0MΔ>
is the lost mass of the rocket at the height H. If
61
10 cmβ
−−
= , for
7
350km 3.5 10 cmH ==⋅, then we have
35
(1 )e 36e
H
H
β
β
−−
+=
14
2.270 10
−
≅⋅
1 . Assuming that
32
0
10 9.81 10 cm/sag=≅⋅
,
242
1 m 10 cmA = =
,
033
10 g/cm
a
μ
−
= , 6C = , it results
62
1.177 10 g/sK ≅⋅ , while
21822
/1.17710gcm/sK β ≅⋅⋅ ; with
22
9.81 10 cm/sg =⋅ ,
8
6.38 10 cmR =⋅ and
supposing that
6
510gM =⋅ , we have
17 2 2
/( ) 1.627 10 g cm /sMgRH R H+≅ ⋅ ⋅ .
Finally, we obtain
18 2 2 18 11
1.340 10 g cm /s 1.340 10 erg 1.340 10 JW =⋅⋅ =⋅ =⋅,
hence the approximate value of the mechanical energy necessary for the rocket to come
out from the terrestrial atmosphere (these data are important to design the motor of the
rocket); we notice also that
2
/WKβ≅ (with an error of 12% in the preceding case).
The velocity
5
0
2 8.287 10 cm/s 8.287 km/sVaH=≅⋅ = at the height H, is
reached after an interval of time
0
/ 84.48 sTVa==; the velocity V is thus greater
than the first cosmic velocity at the height
H (smaller than at the Earth surface, as it was
shown in Chap. 9, Sect. 2.2.2). The duration
T is, in fact, greater, the trajectory of the
rocket being – in reality – curvilinear; in practice, the active phase is of several minutes.
13.2.2.2 Problem of n Particles
We shall study the problem of
n particles in the case of the capture phenomenon; we
assume thus, for instance, that one has to do with celestial bodies acted upon by internal
forces of Newtonian attraction, which are capturing meteorites. We consider to be in the
Levi-Civita case (the absolute velocity of the captured masses vanishes), the equation of
motion of a particle being of the form (10.3.4).
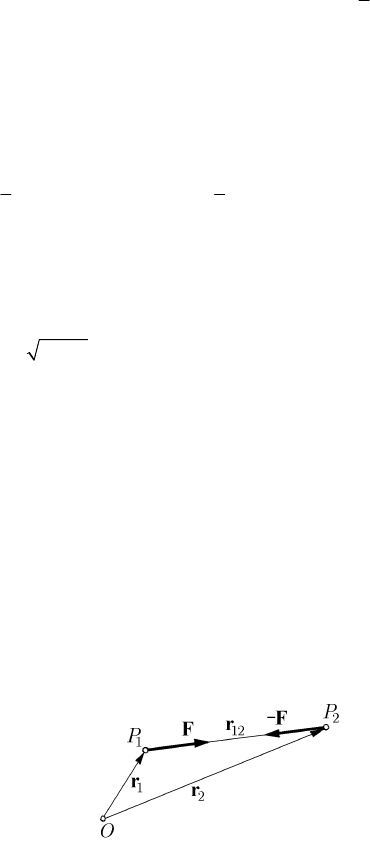
Fig. 13.10 Problem of two particles
In the case
n = 2 (the problem of two particles), studied in 1928, in the frame of the
mentioned mathematical model, by Gh. Vrănceanu, let
1
P
and
2
P
be two particles of
position vectors
1
r and
2
r , with respect to an inertial frame of reference, and of
variable masses
1
m and
2
m , respectively; we denote
12 2 1
=−rrr (Fig. 13.10), the
force of universal attraction (conservative force, which derives from the potential
182