Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

Chapter 14
Dynamics of the Rigid Solid
If for any input (for any system of external forces) or for any interactions (system of
internal forces) all the pairs of points (particles) of a mechanical system remain at a
mutual invariant distance in time, then we have to do with a non-deformable
mechanical system; in case of a continuous non-deformable medium we use the
denomination of rigid solid. This notion represents an idealization of physical reality,
because any body subjected to the action of forces is deformed; but often these
deformations are very small with respect to the dimensions of the body. Thus, the rigid
solid (body) represents a mathematical model of the bodies the deformation of which
can be neglected in a first approximation. Sometimes, in case of special problems
concerning the rigid solids, there can appear contradictions and it is necessary to
complete the mathematical model, assuming that the mechanical system is no more
rigid (partially or in its totality); this happens, for instance, in the calculation of the
constraint forces which appear in case of hyperstatic mechanical systems, in some cases
of friction or in other problems concerning the collision of bodies. The problems put in
mechanics of rigid solids form what is called stereomechanics.
We present firstly the problems concerning the free or constrained rigid solid;
starting from these results, we consider then the motion of the rigid solid about a fixed
axis, as well as the plane-parallel motion of it.
14.1 Motion of a Free or Constrained Rigid Solid
In what follows, we will give results and will establish general theorems for the motion
of the free or constrained rigid solid; the results thus obtained will be applied to various
particular cases.
14.1.1 Motion of the Free Rigid Solid
After some preliminary considerations concerning the representation of the rigid
displacement of a solid, the geometric and mechanical quantities which appear in case
of a free rigid solid are specified; the corresponding general theorems are then stated, in
these conditions.
14.1.1.1 Finite Rototranslations
We have seen that a rigid solid
S is characterized by the relation
P.P. Teodorescu, Mechanical Systems, Classical Models,
© Springer Science+Business Media B.V. 2009
193
MECHANICAL SYSTEMS, CLASSICAL MODELS
194
const
ij j i
PP
′′
=−=
rr
,
(14.1.1)
where
i
′
r
and
j
′
r
are the position vectors of two arbitrary points,
i
P and
j
P ,
respectively, with respect to the inertial frame
′
R
. We have shown in Chap. 3,
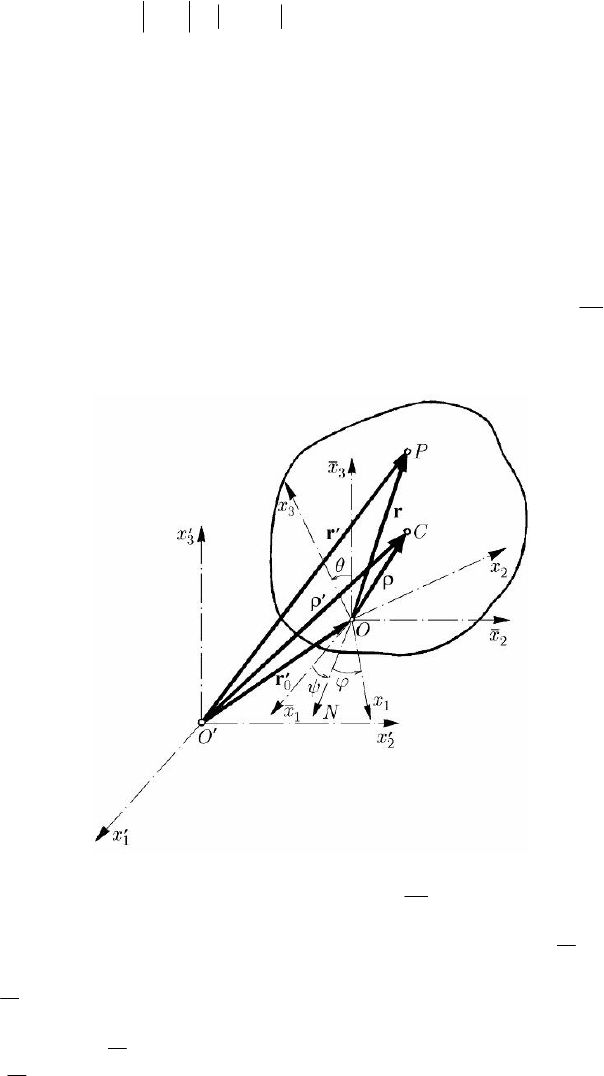
Sect. 2.2.3 that a free rigid solid has six degrees of freedom, so that its position with
respect to a fixed frame of reference can be represented by six parameters, which can
be, e.g.: the co-ordinates
1O
x
′
,
2O
x
′
,
3O
x
′
of a point O of the rigid solid and Euler’s
angles (the angle of precession ψ,
02ψπ≤< , the angle of nutation θ,
0 θπ≤≤
and the angle of proper rotation ϕ,
02ϕπ≤<
), which specify the rotation of the
rigid body with respect to the point O (the orientation of a non-inertial frame
R rigidly
linked to the solid and with the pole at O, with respect to a non-inertial frame
R , with
the pole at O and with the axes parallel to the axes of an inertial frame
′
R
) (Fig. 14.1).
Let be a square matrix
M with complex elements. The matrix
T
+
=MM, where
T
M is the transpose of the matrix M (obtained by replacing the lines by the columns),
while
M is the conjugate matrix of the matrix M (obtained by replacing its elements
by the corresponding complex conjugate elements), is called the adjoint matrix of the
matrix
M. If
=MM
, then the matrix M is real (all its elements are real), while if
=−MM, then the matrix M is purely imaginary. A square matrix S is called
Fig. 14.1 The rigid solid in an inertial frame of reference R
and in non-inertial ones
R and R
′
195
symmetric or antisymmetric (skew-symmetric) as we have
T
=SS
or
T
=−SS
,
respectively. A square matrix
H is called Hermitian (self-adjoint) or antiHermitian if
+
=HH or
+
=−HH, respectively; we notice that a real and symmetric matrix is
Hermitian. If a square matrix
O satisfies the relation
T1−
=OO, where
1−
O is the
inverse of the matrix
O (
11−−
==OO O O E , E being the unit matrix), that is
TT
==OO O O E , then O is called orthogonal complex matrix, while if a square
matrix
U satisfies the relation
1+−
=UU
(
++
==UU U U E ), then it is called unitary
matrix. If
1+−
=RR
and
=RR
(the square matrix R is unitary and real), then
T
T +−
===RRRR
, that is
T1−
=RR; in this case, the matrix R is called
orthogonal real matrix (or only orthogonal). The sum of the elements of the principal
diagonal of a square matrix
M represents the trace of the matrix (denoted by tr M),
being an invariant to a linear transformation of the matrix elements.
The matrix specified by (3.2.11''') allows to pass from the frame
R
(or
from the frame
′
R
) to the frame R by the transformation relation (3.2.11'') of the
form
′
=iiα
; in other words, the transformation matrix may be conceived as an
operator which, acting on the frame
R , transforms that one in the frame R. If the
matrix operates on the components of a vector
r in the frame
R
, then we obtain
the components of the vector
=rr in the frame R (the vector does not change); we
can, as well, consider the relation
∗
=rrα , which transforms a vector r in a vector
∗
r
in the same frame R. In the first case, the matrix corresponds to a counterclockwise
rotation, while in the second case it corresponds to a clockwise one. The matrix is an
orthogonal one, the trace of which does not vanish, in general.
Because we can determine, at any moment, the position of the rigid solid by the
position of the frame
R with respect to the frame R , hence by the parameters which
specify this position, the transformation matrix will be of the form
(t ); if at the
initial moment
0
tt= we have ≡RR, then it results
0
()t = Eα , coinciding with
the unit matrix. The motion being continuous, the matrix
(t ) must be a continuous
function of time and we can state that it is obtained by continuity from the identical
transformation. Taking into account the rigidity condition (14.1.1), it results that the
matrix is orthogonal.
We will assume now that the pole O, common to the frames
R and R is fixed. If
the motion of the frame
R about O is a motion of rotation, then there exists a direction
which corresponds to the axis of rotation and which is not affected by the operator , a
vector along this direction having the same components in the two frames. To put in
evidence the existence of such a direction we will show that there exists a vector
r
which has the property
r = r. On the other hand, the equation =rrλα , λ scalar, has
a solution for the eigenvalues λ of the matrix ; we will try to show that between these
eigenvalues is also the eigenvalue
= 1λ . The equation ()λ−=E0
α
leads to the
characteristic equation
[]
det 0λ−=Eα , which gives the eigenvalues
123
,,λλλ
(see
α = ΦΘΨ
α = α
14 Dynamics of the Rigid Solid
α
α
α
α
α
α
α
α
α
Chap. 3, Sect. 1.2.3 too). Due to the orthogonality of the matrix , the modulus of a
vector
r remains invariant by the mentioned transformation. The characteristic equation
(an algebraic equation of third degree with real coefficients) has at least a real root and
can have also complex solutions, the corresponding eigenvectors being, in this case,
complex (they do not exist in the real physical space). The modulus of such a vector is,
in the general case,
2
=⋅rrr, where we have put in evidence the conjugate
eigenvector
r
; by transformation, one obtains ()( )λλ⋅rr, so that we must have
1λλ = (if λ is an eigenvalue, then λ is an eigenvalue too). The real root can be only
λ = ±1. We notice that
123
det λλλ=α and can be equal to ±1. Because one cannot
pass by a jump (the motion is continuous) from
0
det ( ) det 1t ==Eα (corresponding
to a proper rotation) to
det 1=−α (corresponding to an improper rotation), it results
that one can have only
det ( ) 1t =α . A transformation matrix of the form
10 0
010
00 1
⎡⎤
−
⎢⎥
≡− =−
⎢⎥
⎢⎥
−
⎢⎥
⎣⎦
Eα
,
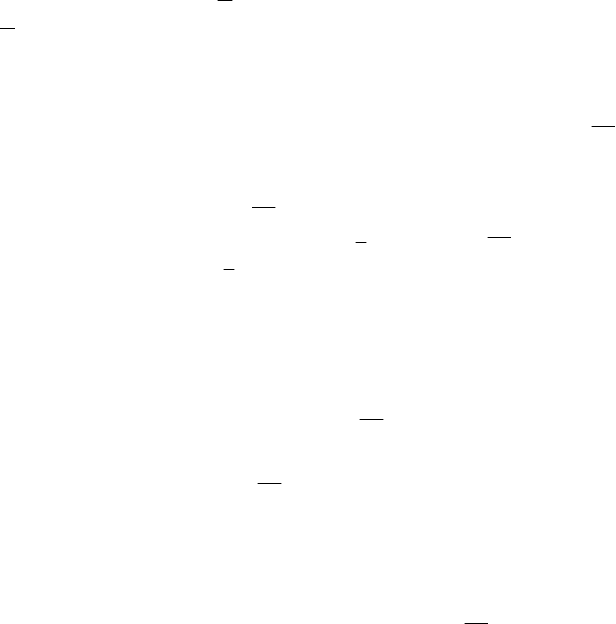
det 1=−α ,
would correspond to an inversion (reflection) of the axes of the frame
R , but there
does not exist any rigid motion which could transform a right-handed frame of
reference into a left-handed one or conversely (to do this, one must pass by a four-
dimensional space) (Fig. 14.2); hence, an inversion can never correspond to a real
displacement of a rigid solid. We obtain the same conclusion for any transformation
matrix for which
det 1=−α , including thus the inversion operation, because such a
matrix can be written in the form
1
=ααα,
1
det 1=α
. Obviously, on this way we
obtain the same conclusion as above. The three eigenvalues of the matrix cannot be
distinct, if they are real, because
1
j
λ =± , j = 1,2,3. If two of the eigenvalues are
equal, then they cannot be real and equal to −1 (the third of the eigenvalues must be
equal to 1, to can have
123
1λλλ = ); one obtains the same conclusion if two of the
eigenvalues are complex conjugate, because
1λλ = . The trivial case in which all three
roots are real (
123
1λλλ===) corresponds to the identical transformation. Hence,
one can state that, excluding the above mentioned trivial case, to any rigid motion
α
Fig. 14.2 Impossibility to transform a right-handed frame of reference in a left-handed one
196
MECHANICAL SYSTEMS, CLASSICAL MODELS
corresponds only a single eigenvalue equal to 1. For the general displacement of the
rigid solid by which that one passes from a position to another one, with respect to a
given frame of reference, we can state
Theorem 14.1.1 (L. Euler) The general displacement of a rigid solid with a fixed point
is a finite rotation about an axis which passes through this point and is uniquely
determined.
We can always transform the matrix so as to obtain a new matrix
∗
α
leading to a
frame
R (
∗
′
=
iiα
), with the axis
3
Ox along the rotation axis; in this case
cos sin 0
sin cos 0
001
χχ
χχ
∗
⎡
⎤
⎢
⎥
=−
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
α
,
(14.1.2)
where χ is the rotation angle. We notice that
tr 1 2 cos χ
∗
=+α ; knowing that the
trace of the matrix is invariant with respect to the transformation thus effected, we have
also
tr 1 2 cosχ=+α . In case of the matrix of the form (3.2.11'''), we can express
the angle χ as a function of the Euler angles by the relation
()
22
cos cos cos sin
22
θθ
χψϕ=+−
.
(14.1.3)
If we suppress the link imposed to the rigid solid (the fixed point) and if we
introduce the three degrees of freedom corresponding to the translation of the origin O
of the frames
R and R, then we can state
Theorem 14.1.2 (Chasles) The general displacement of a free rigid solid is a finite
rototranslation.
ernions. Stereographic Parameters
Besides the representation of the rotation of the rigid solid by means of Euler’s
angles, one can imagine other representations too, useful in various cases. Thus, the
finite rotation of angle χ about an axis of unit vector
u, which passes through the pole
O, can be characterized by the set
{
}
{
}
,2 , 2nnχπ χπ+=−−+uu, n ∈ Z; but this
representation is multiform. We can reduce this multiplicity by introducing a vector
V,
of components λ, μ, ν, and a scalar ρ in the form
=Vusin
2
χ
, = cos
2
χ
ρ
,
2222
1λμνρ+++=.
(14.1.4)
We see easily that the parameters
λ, μ, ν, ρ which satisfy this relation determine a
unique rotation; but to a given rotation correspond the parameters −
λ, −μ, −ν, −ρ too,
14.1.1.2 Eulerian Parameters. Quat
197
14 Dynamics of the Rigid Solid
α
α
hence two sets of parameters. Hence, the parameters
λ, μ, ν, ρ, called Eulerian
parameters, can describe – analogously – the rotation of the rigid solid; if we consider
these parameters as Cartesian co-ordinates of a point in the
4
E -space, then we can
state: (i) any point of the hypersphere (14.1.4) can specify the actual (final)
configuration (position) of the rigid solid; (ii) any actual configuration of the rigid solid
determines two diametrical opposite points on the hypersphere; (iii) there exists a
straight lines passing through the origin of the space
4
E .
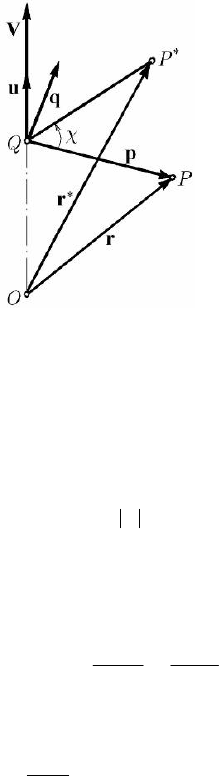
Let be P
(r ) and ()P
∗
r the initial and the actual positions of a point of the rigid
solid, respectively, which are rotated by an angle
χ about an axis which passes through
the pole O and is specified by the unit vector
u (or by the vector V) and let be Q their
common projection on this axis; at the point Q we consider a right-handed orthogonal
frame, determined by the vectors
QP =
p , q, 1=q , and V (Fig. 14.3). We can write
cos sinOQ QP OQ χχ
∗∗
=+ =+ +
rpq
;
but
OQ=−
pr
,
×
×
==
Vp
Vr
q
Vp Vp
,
so that
()
()
22 2
sin
cos 1 cos 2 2
OQ V V OQ
V
χ
χχ ρ ρ
∗
=+−+ ×=−+ +×
rr Vr r Vr
.
Because
2
()VOQ=⋅
VrV
, we have, finally,
one-to-one correspondence between the actual configuration of the rigid solid and the
Fig. 14.3 Eulerian parameters
198
MECHANICAL SYSTEMS, CLASSICAL MODELS
()
()
22
22Vρρ
∗
=− + ⋅ + ×rrVrVVr;
(14.1.5)
projecting on the axes of the frame
R, we obtain
j
ij j
xxα
∗
= ,
()
2
22
ij ij i j
kk ijk k
VV VV Vαρ δ ρ=− + −∈,
(14.1.5')
so that the transformation matrix is
() ()
() ()
() ()
2222
2222
2222
22
22
22
ρλμν λμνρ νλμρ
λμ νρ ρ μ ν λ μν λρ
νλ μρ μν λρ ρ ν λ μ
⎡⎤
+−− − +
⎢⎥
⎢⎥
=+ +−− −
⎢⎥
−++−−
⎢⎥
⎣⎦
α
,
(14.1.6)
++=
222 2
sin
2
χ
λμν ,
2222
1λμνρ+++=,
(14.1.6')
corresponding to Olinde Rodrigues’s formulae.
Obviously, this matrix remains invariant if one changes the signs of Euler’s
parameters. By comparison with the matrix (3.2.11''') which depends on Euler’s angles,
we find easily (we consider one of the two determinations)
−
= sin cos
22
ψϕ
θ
λ
,
−
= sin sin
22
ψϕ
θ
μ
,
+
= cos sin
22
ψϕ
θ
ν
,
+
=−cos cos
22
ψϕ
θ
ρ
.
(14.1.6'')
A quaternion q is defined in the form
qijkabc d=++ +, a,b,c,d ∈ R, where
i,j,k are quaternion units, which satisfy the relations
22 2
ijk 1== =−,
jk kj i=− = , ki ik j=− = , ij ji k=− = . The vector part Vq, the scalar part Sq, the
conjugate quaternion Kq, the norm N q and the reciprocal quaternion
1
q
−
are defined
by the relations
qijkabc=++V
,
qSd=
,
qqqS=+V
,
qqqKS=− +V
,
222 2
qqqNKabcd==+++
,
()
−
==
1
2
qq
q
qq
q
KK
K
N
.
The vector part
Vq can be considered as a usual vector; thus, if q0S = , then the
quaternion q degenerates, becoming a vector. A quaternion q determines a number
0h > , a unit vector p and an angle χ, 02χπ≤< , by the relation
() ()
[]
qcos/2psin/2h χχ=+; in this case,
qNh=
, while
() ()
[]
11
q cos /2 psin /2h χχ
−−
=−.
Let be the quaternion
qijkλμν ρ=++ +,
2222
1λμνρ+++=, hence with
q1N = ; we have
1
qijkλμν ρ
−
=− − − + . We introduce also the degenerate
199
14 Dynamics of the Rigid Solid
quaternions
12 3
rijkxx x=++,
123
rijkxxx
∗∗∗ ∗
=++ with rr0SS
∗
==. The
relation
1
rqrq
∗−
= defines a transformation which represents a rotation of angle χ
about the axis p. Passing to a matric notation, we find again the matrix (14.1.6),
λ, μ, ν
and
ρ being thus Eulerian parameters; we obtain, in a quaternion notation, a new form
of the respective representation. Observing that
1h = , it results
qpsin
2
χ
=V ,
()
=++=V
2
222 2
qsin
2
N
χ
λμν
, ==qcos
2
S
χ
ρ
;
(14.1.7)
hence, the vector
Vq is the vector V (along the rotation axis), the angle χ of the
quaternion being the rotation angle.
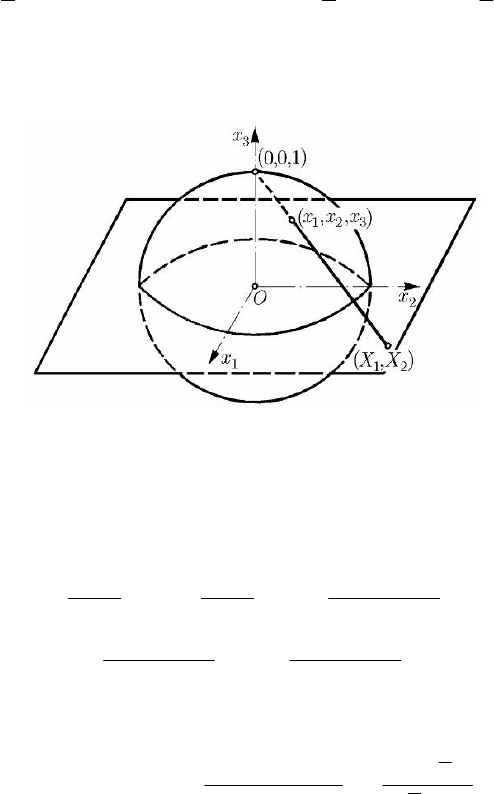
Projecting the unit sphere
222
123
1xxx++= from the point (0,0,1) on the plane
3
0x = , one obtains a stereographic projection. Let
()
12
,XX be thus the projection
of the point
123
(,, )xxx (Fig. 14.4); we will have
=
−
1
1
3
1
x
X
x
, =
−
2
2
3
1
x
X
x
,
=
++
1
1
22
12
2
1
X
x
XX
,
=
++
2
2
22
12
2
1
X
x
XX
,
+−
=
++
22
12
3
22
12
1
1
XX
x
XX
,
as well as
()
()
+
++= =
+
++
22
12
222
123
22
22
12
dd
dd
ddd4 4
1
1
XX
ZZ
xxx
ZZ
XX
,
Fig. 14.4 Stereographic projection
200
MECHANICAL SYSTEMS, CLASSICAL MODELS
where we have denoted
12
iZX X=+, Z being the complex conjugate. Any
transformation
ZZ
∗
→
induces a transformation
()
123 123
(,, ) ,,xxx xxx
∗∗∗
→ of the
unit sphere in itself, which will be rigid if the sum
dd
j
j
xx is conserved, hence if
()
()
∗
∗
∗
∗
=
+
+
22
dd dd
1
1
ZZ ZZ
ZZ
ZZ
.
One can show that this condition is satisfied by the transformations
∗
+
=
−+
pZ q
Z
qZ p
, 1pp qq+=,
(14.1.8)
where the stereographic parameters p and q are complex numbers to which correspond
three degrees of freedom. Observing that
()()
∗
∗∗
∗
∗
+= = + − + −
+
22
12 12 12 3
2
iii2
1
Z
xx pxxqxx pqx
ZZ
,
()()
22
12 12 12 3
ii i2xxpxx qxx pqx
∗∗
−= − − + − ,
()()
()
∗
∗
∗
∗
∗
−
==++−+−
+
312123
1
ii
1
ZZ
x pqx x pqx x pp qqx
ZZ
,
we find the transformation matrix
()()
()
()()
()
()
⎡
⎤
+−− −+− − +
⎢
⎥
⎢
⎥
=−+− +++ −
⎢
⎥
⎢
⎥
+−−
⎢
⎥
⎢
⎥
⎣
⎦
22 22
22 22
22 2 2
2222
1i
22
i1
i
22
i
p p q q p p q q pq pq
p p q q p p q q pq pq
pq pq pq pq pp qq
α
,
(14.1.9)
hence a new representation of the motion of rotation (not only of the rigid motion of the
unit sphere about its centre) by means of the stereographic parameters.
Comparing the expressions (14.1.6) and (14.1.9) of the matrix , taking into account
(14.1.6'') and by a choice of sign, we find the connection between the stereographic
parameters, the Eulerian parameters and Euler’s angles in the form
()
−+
=+ =−
i
/
2
icose
2
p
ψϕ
θ
ρν
,
()
−
=− + =
i
/
2
iisine
2
q
ψϕ
θ
μλ
.
(14.1.10)
201
14 Dynamics of the Rigid Solid
α
Starting from the above results, we define the complex numbers
()
+
=− =− + =
i
/
2
icose
2
p
ψϕ
θ
αρν
,
()
−−
=− = + =
i
/
2
iisine
2
q
ψϕ
θ
βμλ
,
(14.1.11)
()
−
==−+ =
i/2
iisine
2
q
ψϕ
θ
γμλ
,
()
−+
=− =− − =
i
/
2
icose
2
p
ψϕ
θ
δρν
,
(14.1.11')
which satisfy the condition of unimodularity, being connected by the relations
γβ=−
,
δα= ,
1
αβ
αδ βγ αα β β
γδ
=−= + =
,
(14.1.11'')
corresponding to the relation (14.1.8) between the stereographic parameters. These
numbers are the Cayley-Klein parameters of the motion of rotation and constitute a new
representation of it. The corresponding transformation matrix will be
()()
()()
()
()
⎡⎤
−−+ +−− −
⎢⎥
⎢⎥
=−+− +++−+
⎢⎥
⎢⎥
−++
⎢⎥
⎢⎥
⎣⎦
2222 2222
2222 2222
1i
22
i1
i
22
i
αβγδ γδαβ γδαβ
αβγδ αβγδ αβγδ
βδ αγ αγ βδ αδ βγ
α
.
(14.1.12)
The above given parametric representations correspond to the group of proper
rotations
(3)O
+
; but they can be put in connection with the two-dimensional special
unitary group
(2)SU , homomorphic with the group (3)O
+
too. Thus, the Cayley-
Klein representation is characterized by the matrix
αβ
αβ
γδ
βα
⎡
⎤
⎡⎤
≡=
⎢
⎥
⎢⎥
−
⎢
⎥
⎣⎦
⎣
⎦
Q ,
2
2
1αβ+=,
(14.1.13)
where
α and β are the complex Cayley-Klein parameters, while λ, μ, ν, ρ,
2222
1λμνρ+++=, specified by the relations (14.1.11), (14.1.11'), are the real
Cayley-Klein parameters of the
(2)SU group (they coincide with Euler’s parameters).
We can choose as independent parameters the real numbers
λ, μ, ν and sgn /ρρρ= ,
the magnitude of
ρ being given by the last relation (14.1.6'). The elements of the matrix
Q being defined by (14.1.11), (14.1.11'), it results 1α ≤ , 1β ≤ , so that we can
14.1.1.3 The Cayley-Klein Parameters. Pauli’s Matrices
202
MECHANICAL SYSTEMS, CLASSICAL MODELS