Слепова С.В. Основы теории точности измерительных приборов
Подождите немного. Документ загружается.

, Условие равновесия моста при отсутствии внешнего воздействия (
0
=
x
R
x
r 0=
)
3241
)( RrRR R
=
+
. (5.15)
После появления внешнего воздействия:
0
≠
x
R
,
0
≠
x
иобретает вид
r
, условие равновесия
пр
(
)
xxx
rRRrrRRR
+
=
−
+
+
3
. (5.16)
Вы учаем
расчетную характеристику
241
)(
читаем выражение (5.15) из (5.16) и после преобразований пол
шк21
LRR
Rr
xx
+
=
[делений шк
где
Z
ш
– число
шк1
ZR
алы],
делений шкалы в диапазоне измерений;
L – длина шкалы,
соответствующая
Z
ш
.
ш
Влияние инструментальных погрешностей
1
R
Δ
и
2
R
Δ
на выходную величину
x
r
определяем по формуле (
5.13):
()
1
шк
шк2
R
ZR
Δ⋅ [дел
2
11
)(
L
RR
RR
R
r
Rr
x
x
x
+
=Δ⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
=ΔΔ
ений шкалы],
21
1
1
R
O
()
2
шк
2
21
1
2
2
2
2
)( R
RR
R
R
Rr
x
R
x
O
⋅⋅
+
=Δ⋅
⎟
⎟
⎠
⎜
⎜
⎝
∂
=ΔΔ [делений шкалы].
шк
R
L
ZR
Δ⋅
−
⎞
5.3.2. Метод преобразованных схем
Во многих задачах величина у (показание измерительного прибора)
выражается в зависимости от измеряемой величины
х и параметров схемы
прибора довольно сложной функцией. Отыскание частной ется
иногда трудоемкой операцией.
В некоторых случаях функция преобразования
r
x
⎛
∂
s
q
производной явля
),( q
x
y
не содержит тех
параметров, для к ости. Например,
эксцентри оси не в
оторых даны инструментальные погрешн
ситет звена входит выражение для
),( q
x
y
, если номинальное
значение эксцентриситета равно нулю. Тогда вычисление частной производной
становится невозможным. Для определения погрешности в подобных задачах
предложен метод преобразованных схем. Академик Н.Г. Бруевич предложил
метод преобразованных механизмо , профессор М – метод
об азованных электрических цепей
.
Метод преобразованных механизмов. В преобразованной схеме прибора
первичная погрешность моделируется с помощью дополнительных звеньев в
схеме механизма.
Алгоритм метода преобразованных механизмов:
1. Заменить исследуемое звено номер
s на группу звеньев так, чтобы размер
в .Л. Быховский
пре р
можно было изменять, т. е. моделировать погрешность
s
q
s
q
Δ
. Для
51
преобразования механизмов используют элементы широко применяемых
кинематических пар: обычные и сдвоенные ползуны, кулисы и др. Полагают, что
раз
по
координата, определяющая
пол шности: Δ
q
1
–
сме
шипа, Δ
q
3
– погрешность длины шатуна. Требуется найти результат
отд
ног .
меры прочих звеньев не имеют погрешностей.
2. Закрепить ведущее звено механизма в заданном положении.
3. Построить в масштабе план малых перемещений для преобразованного
механизма.
4. По плану малых перемещений определить значение частной погрешности
ложения выходного звена
S
yΔ
.
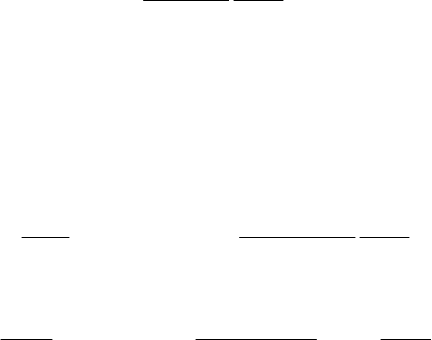
Пример 5.4. Кривошипно-шатунный механизм.
В кривошипно-шатунном механизме (рис. 5.7) входная величина φ – угол
поворота кривошипа 2, выходная величина
y –
q
ожение точки В ползуна 4. Пусть заданы первичные погре
щение направляющих ползуна 4 нормально к оси
Оу, Δq
2
– погрешность
длины криво
ельного действия каждой из указанных первичных погрешностей на
положение ползуна и совмест о действия
3
β
O
y
ϕ
1
2
4
A
B
Рис. 5.7. Схема к иво ипно-шатунного механизма р ш
Функция преобразования механизма определяется выражением
()
2
2
2
32р
sincos ϕ−+ϕ= qqqy , (5.17)
где
q
2
– длина кривошипа ОА; q
3
– длина шатуна АВ.
Воспользуемся методом преобразованных механизмов, т. к. параметра
q
1
нет в
формуле связи (5.17); частные производные от по
q
2
и q удобнее найти
графически, чем а
1. Определим погрешность
р
y
3
налитически.
1
q
y
Δ
положения ползуна в зависимости от
первичной
1
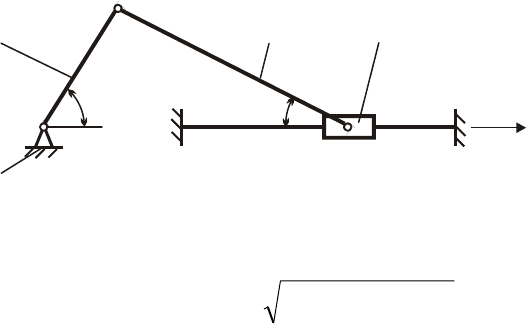
Для создания возможности смещения ползуна 4 нормально к си
О
реобразованный механизм, в
ra
B
SSS
погрешности Δ
q .
о
у вводим
кулису. Закрепляем звено
ОА. Тем самым получаем п
котором моделируется погрешность Δ
q
1
(рис. 5.8).
Для построения плана малых перемещений рассмотрим движение точки
В
преобразованного механизма как сложное
r
r
r
e
BB
Δ+Δ=Δ
.
Здесь
a
B
S
r
Δ – абсолютное малое
шатуна
АВ относительно точки
перемещение точки
В во вращательном движении
А, направлено перпендикулярно отрезку [АВ];
52
r
B
– относительное перемещение точки В, направлено параллельно
направляющей ползуна – вдоль оси
Оу, соответствует искомой частной
пог
e
r
S
r
Δ
решности
1
q
yΔ
;
B
SΔ
– перемещение точки В в переносном поступательном
движении кулисы, направлено вертикально вниз, соответствует моделируемой
погрешности Δ
q
1
.
β
O
ϕ
A
B
Δ
y
Δ
q
1
q
1
p
b
b
*
Δ
q
1
Δ
y
q
1
AB
y
β
а) б)
Рис. 5.8. Схема моделирования погрешности :
а – преобразованный механизм; б – план малых перемещений
При построении плана малых перемещений из полюса
р откладываем
вертикально вниз погрешность Δ
q
1
в виде отрезка [рb
*
] в выбранном масштабе
(см. рис. 5.8б), затем из точки
b строим прямую, параллельную оси Оу
(направление движения ползуна), а из точки
р проводим прямую,
луч м точку
b.
Из плана
малых перемещений
1
q
yΔ
перпендикулярную к отрезку [
АВ]. На пересечении этих прямых по
Длина отрезка [
b
*
b] с учетом масштаба соответствует величине
и
1
q
yΔ
.
получаем
β
⋅
Δ
−
=
Δ
tg
1
qy
q
.
1
Зна рк «–» следует из того, что рассматриваемая пог ешность Δ
q
1
смещения
направляющих ползуна уменьшает выходное значение
у.
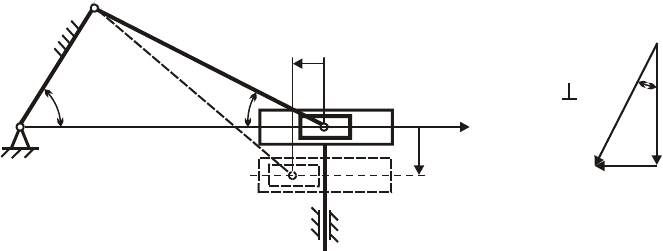
2. Определим погрешность
2
q
y
Δ
положения ползуна в зависимости от
первичной погрешности Δ
q
2
.
Преобразованный механизм получим, закрепив кривошип
О в заданном
положении угла φ, и установив на звено
ОА ползун, с помощью которого будем
моделировать инструментальную
А
погрешность Δ
q (рис. 5.9).
В преобразованном механизме звено
АВ овершает плоскопараллельное
ния звена относительно
это
2
с
движение, которое можно представить в виде совокупности поступательного
движения вместе с полюсом
А и вращательного движе
го полюса. Тогда малое перемещение точки
В
B
S
r
Δ равно геометрической
сумме малого перемещения
r
Δ
перемещения точки
В вокруг
точки
А, выбранной полюс, и малого
точки
А
за
A
S
BA
S
r
Δ при вращении звена АВ относительно
полюса:
53
BAAB
SSS
r
r
r
Δ+Δ=Δ .
Здесь малое перемещение
B
S
r
Δ , соответствующее искомой частной погрешности
2
q
, направлено параллельно оси Oy; вектор
A
S
r
yΔ
Δ соответствует моделируемой
погрешности Δ
q
2
и направлен параллельно закрепленному звену ОА; малое
перемещение
BA
S
r
Δ направлено перпендикулярно отрезк [АВ]. у
β
2
O
β
ϕ
Δ
q
2
A
p
b
y
Δ
y
q
2
Δ
y
q
2
a
ϕ β
2
π
Δ
AB
q
2
ϕ
π
B
а) б)
Рис. 5.9. Схема моделирования погрешности :
а – преобразованный механизм; б – план малых перемещений
План малых перемещений будем строить их точки
р (см. рис. 5.9б).
Параллельно отрезку [
ОА] откладываем в масштабе отрезок [ра], отображающий
погрешность Δ
q
2
. Из точки а проводим прямую, перпендикулярную [АВ] и из
точки
р – прямую, параллельную оси Оу. Прямые пересекаются в точке b. Длина
отрезка
рb с учетом масштаба соответствует погрешности Из плана малых
перемещений согласно теореме синусов запишем:
2
q
yΔ
2
q
yΔ
.
()
β
⎟
⎞
⎜
⎛
β+
π
Δ cos
sin
2
q
β+ϕ
=
⎟
⎠
⎜
⎝
β−ϕ−
=
Δ
cos
2
sin
2
y
q
⎞⎛
π
⎠⎝
2
Откуда
(
)
β
β
+
ϕ
Δ=Δ
cos
cos
2
2
qy
q
.
3. Определим погрешность
3
q
y
Δ
положения ползун зависимости от
первичной погрешности Δ
q
3
.
а в
Погрешность Δ
q
3
будем моделировать с помощью сдвоенного ползуна в точке
В, предварительно закрепив звено ОА. Преобразованный механизм изображен на
рис. 5.10.
Для построения плана малых перемещений рассмотрим движение точки
В
преобразованного механизма как сложное
54
e
B
r
B
a
B
SSS
r
r
r
Δ+Δ=Δ , (5.18)
где – абсолютное малое перемещение точки
В направлено параллельно оси
Oy, погрешности
a
B
S
r
Δ
,
r
B
S
r
Δсоответствует искомой частной
3
q
y
Δ
; – относительное
точки
В, направлено [ соответствует
мод
перемещение параллельно отрезку АВ],
елируемой погрешности Δ
q
3
;
B
S
r
e
Δ
– перемещение точки В в переносном
вращательном движении шатуна
АВ относительно точки А, направлено
перпендикулярно отрезку [
АВ]. На основе формулы (5.18) построим план малых
перемещений (см. рис. 5.10б).
β
O
ϕ
A
B
Δ
Δ
y
q
3
p
b
b
*
Δ
q
3
y
q
3
A
B
y
β
а) б)
Рис. 5.10. Схема моделирования погрешности
3
q
yΔ
:
а – преобразованный механизм; б – план малых перемещений
Из плана малых перемещений получим
β
Δ
=Δ
cos
3
3
q
y
q
.
На планах малых перемещений построены детерминированные независимые
частные погрешности
(
i
q
yΔ
3,1=i ). Общая (суммарная) инструментальная
погрешность механизма в этом случае равна:
β
Δ
+
β
β+
ϕ
Δ+β⋅Δ−=Δ+Δ+Δ=
cos
tg
21
321
qqyyy
qqq
Δ
∑
cos
3
q
y
q
.
Метод преобразованных схеме
при ется с помощью дополнительного
генератора в электрической цепи, при этом входные параметры прекращают
действие: питающее напряжение электрическо цепи выключается. К первичным
погрешностям электрических цепей относятся погрешности сопротивлений, силы
ток
производственно-технологической
ставим электрическую цепь в виде
блока с напряжением
Е на входе и напряжением на выходе. Выделим из
блока исследуемый элемент, например сопротивление с погрешностью
)cos(
электрических цепей. В преобразованной
бора первичная погрешность моделиру
й
а, индуктивности, емкости и других параметров.
Метод преобразованной электрической цепи дает возможность определить
результат действия инструментальной
погрешности на выходное напряжение. Пред
AB
U
s
R
s
R
Δ
(рис. 5.11а).
55
U
R
Δ
R
s
G
AB
A
B
F
E
s
U
R
s
C
AB
A
B
D
F
*
Г
G
U
Г
а) б)
Рис. 5.11. Блок электрической цепи (а)
и преобразованная электрическая (б)
Влияние этой погрешности на выходное напряжение формулой
схема
определяется
s
s
s
R
R
f
EU Δ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
=Δ
, (5.19)
где
f – функция параметров электрической цепи. Задача о влиянии
s
R
Δ
на
решается приближенно в рамках линейной теории точности. Для решения
поставленной задачи необходимо определить коэффициент влияния первичной
погрешности.
с. 5.11б) моделируем
погрешность с пом ЭДС
s
U
При построении преобразованной электрической цепи (ри
s
RΔ
ощью дополнительного генератора с
s
eU
Δ
μ
=
Г
,
где μ – масштабный коэффициент;
s
e
Δ
– падение напряжения на участке CD:
(
)
ssssss
RiRiie
Δ
−
≈
Δ
Δ
+
−
=Δ
.
Следовательно,
ss
RiU
Δ
μ
−
=
Г
. (5.20)
Знак «–» означает, что дополнительный источник питания создает между
полюсами
CD ток, противоположный основному току.
Закоротим полюса на входе цепи и включим дополнительный генератор.
Тог
ее ешности
да на выходе преобразованной схемы формируется напряжение
*
AB
U
,
представляющ собой результат влияния инструментальной погр
s
R
Δ
в
масштабе μ:
21)
решность выходного напряжения. Из (5.21) выразим
sAB
UU Δμ
, (5.
=
*
где
s
UΔ
– искомая пог
s
U
Δ
и запишем с учетом масштабного множителя μ, найденного из выражения (5.20):
ss
AB
s
i
U
U −=Δ
*
RΔ . (5.22)
U
Г
Приравняем правые части выражений (5.19) и (5.22)
56
ss
AB
s
s
Ri
U
U
R
R
f
E Δ−=Δ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
Г
*
и найдем значение частной производной:
Гs
⎠⎝
Следовательно, частная погрешность
s
U
*
U
U
E
i
R
f
s
−=
⎟
⎟
⎞
⎜
⎜
⎛
∂
∂
AB
. (5.23)
Δ
определяется согласно (5.19) с учетом
(5.23):
⎟
⎟
⎞
*
AB
. (5.24)
⎠⎝
Г
В выражении (5.24) отношение
⎜
⎜
⎛
−Δ=Δ
U
U
E
i
REU
s
ss
(
)
Ei
определяют из
s
заданной цепи; отношение
(
)
Г
*
UU
AB
– из преобразованной цепи.
жения содержит три постоянных
сопротивления (рис.5.12а). Найти погрешность
Пример 5.5. Делитель напряжения.
Основная схема делителя напря
выходного напряжения
1
U
Δ
,
1
R
Δ
. вызванную первичной погрешностью
A
B
E
U
AB
F
*
Г
U
G
Г
R
1
R
2
R
3
U
AB
A
B
R
1
G
D
F
R
3
R
2
C
ите напряжения:
а – основная схема; б – преобразованная электрическая схема
Из основной цепи находим
а) б)
Рис. 5.12. Дел ль
()
Ei
1
. Согласно закону Ома имеем Отсюда
Σ
= RiE
1
.
()
32321
32
32
32
1
1
11
RRRRR
RR
RR
RR
R
RE
i
++
+
=
+
+
==
Σ
. (5.25)
При построении преобразованной электрической схемы закорачиваем полюса
на входе и включаем на участке
СD дополнительный генератор Г. Для
определения отношения
(
)
Г
*
UU
AB
находим вначале напряжение на входе
*
AB
U
57
преобразованной цепи, ра применяя второй закон
:
ссматривая контур
BRRA
32
и
Кирхгофа
32
32
11
11
1
RR
RR
iiU
+
=
.
32
*
RR
AB
+
=
Напряжение генератора аналогично определяется из другого контура
Г
U
DRR
321
:
RC
()
3
32321
111Г
11
RRRRR
iiU
++
=
⎟
⎟
⎟
⎟
⎞
⎜
⎜
⎜
⎜
⎛
+
=
.
2
32
1
RR
RR
R
+
⎠⎝
+
Тогда
()
32321
32
Г
*
RRRRR
RR
U
U
AB
++
=
. (5.26)
пол .
преобразования получим погрешность выходного напряжения , вызванную
первичной погрешностью :
После подстановки ученных выражений (5.25), (5 26) в (5.24) и
1
UΔ
1
RΔ
(
)
()
[]
1
2
32321
3232
1
R
RRRRR
RRRR
EU Δ
++
+
−=Δ
.
5.3.3. Геометрический метод
В ряде случаев при определении частных погрешностей в механизмах
наиболее эффективным является геометрический ме
в том, что измерительный механизм строят в двух, наложенных друг на друга
пол х е
м
получаемых при таких построениях, находят
аналитические выражения, связывающие первичную и частную погрешности.
При реализации геометрического метода вводят ряд упрощений и допущений,
сущность которых заключается в исключении ошибок второго и высшего
порядков малости: для
тод. Суть метода заключается
ожения , причем первое положени строится без первичной погрешности, а
второе – с первичной погрешностью в сильно увеличенном асштабе. Из
геометрических соотношений,
α
≈
α
≈
α
tgsin
малых углов , 1cos
углом понимают угол порядка 10
–3
–
≈α , дуга и ее хорда
равны и т. д. Под малым 10
–4
радиан.
2 – механизму с первичной погрешностью Δ
q. В треугольнике АА
*
B отрезок [АB]
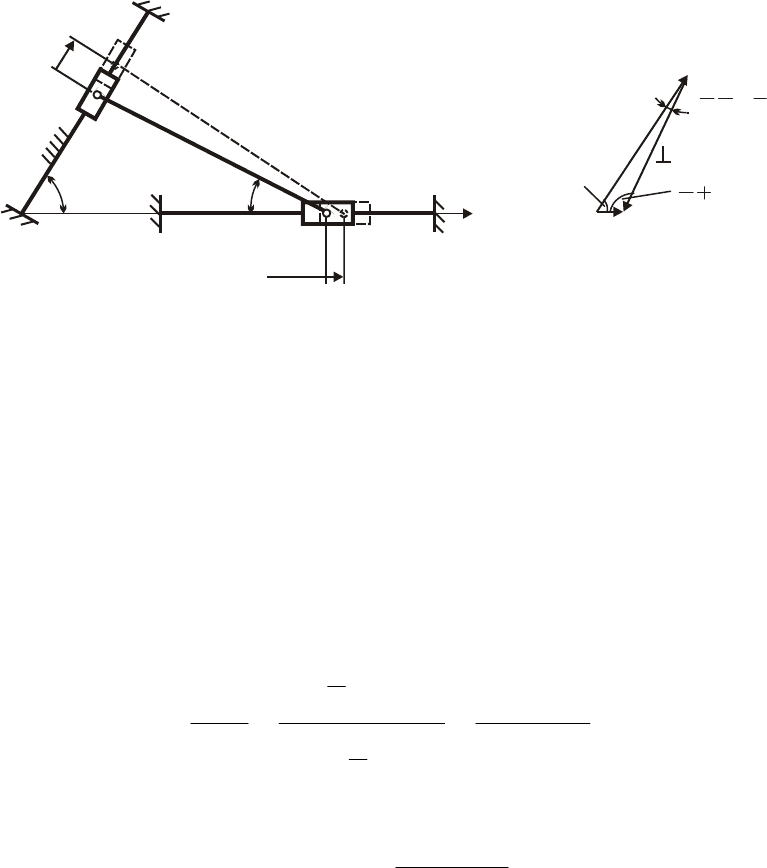
Пример 5.6. Тангенсный механизм.
Определим погрешность от несоответствия параметра
q номинальному
значению на величину Δ
q.
На рис. 5.13 представлена схема тангенсного механизма в двух положениях.
Положение 1 соответствует механизму без погрешности параметра
q, а положение
58
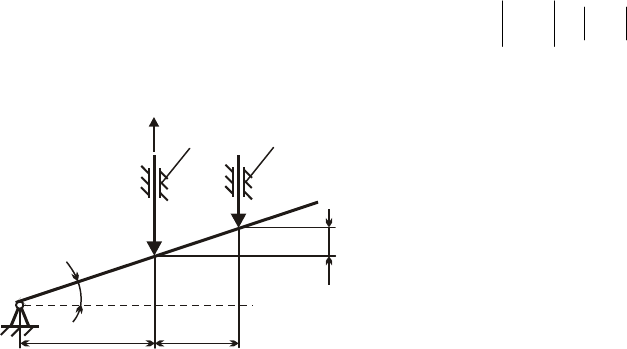
соответствует первичной погрешности Δ
q, а отрезок [А
*
B] – частной погрешности
q
yΔ . Из треугольника АА
*
B получим ϕ⋅= tg
*
ABBA . Следовательно,
осно н о механических цепей (метод
ошибок, мет плеча). В данном пособии рассмотрение этих методов не
представлено.
частных погрешностей
первичных погрешностей
К числу векторных первичных погрешностей относят отклонения от
номинальных значений параметров, характ ием, но
и направлением действия. Среди векторн ущественное место
занимают погрешности параметров, номинальные значения которых равны нулю
(за
п
п
итывать и ее направление.
Для расчета частных погрешностей в случае детерминированных векторных
первичных пог о:
результат
действия векто определяется
утем проекти касания
ле х
ϕ⋅Δ=Δ tgqy
q
.
Рис. 5.13. Тангенсный механизм
в двух положениях
Существует целый ряд других методов расчета частных погрешностей. В
в ом ни реализуются для относительных
од
5.4. Определение
для векторных
еризующиеся не только значен
ых погрешностей с
зоры, перекосы, отклонения от правильной геометрической формы и
расположения оверхностей, эксцентриситеты). Сложность учета векторных
погрешностей обусловлена тем, что наряду со значением первичной огрешности
необходимо уч
решностей рекомендуется следующее правил
рной первичной погрешности на выходную величину
рования вектора на нормаль к поверхностям в точкеп
э ментов кинематически пар
.
Пример 5.7. Передача от кулачка к толкателю.
В передаче от кулачка к толкателю входная величина α – угол поворота
кулачка;
y – выходная величина – координата, определяющая положение
толкателя на оси
Оу.
1. Найти
e
Δ
– частную погрешность выходного перемещения толкателя в
зависимости от эксцентриситета кулачка
e
y
r
Δ
. Заданы модуль эксцентриситета e
Δ
и угол φ, определяющий направление век
r
тора эксцентриситета
Δ в начальном
пол
e
ожении (рис. 5.14).
2
1
ϕ
B
y
*
A
A
Δ
y
q
q
O
Δ
q
59
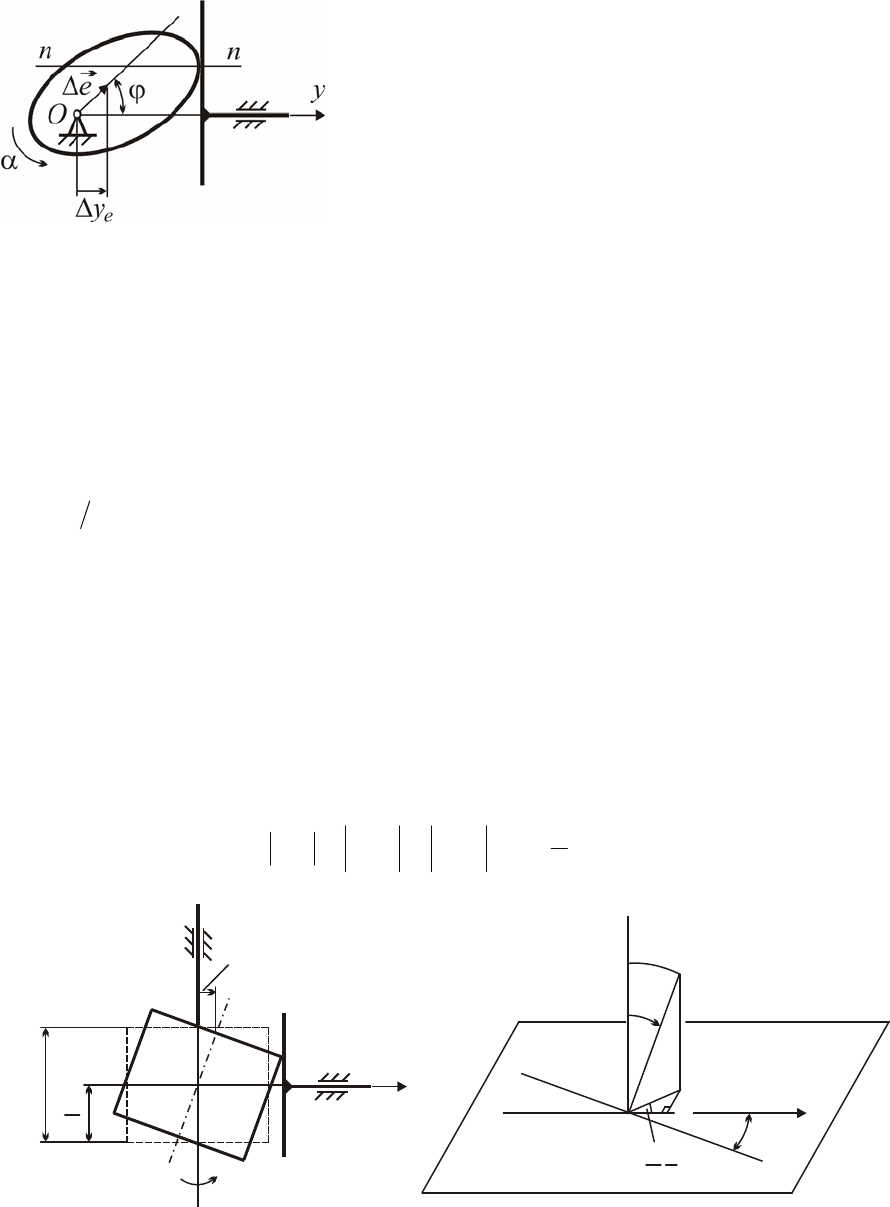
Согласно правилу частная погрешность
e
y
Δ
определяется как проекция вектора
r
e
эксцентриситета
Δ
на нормаль nn к
кулачка и толкателя в точке поверхностям
их касания
ϕΔ
=
Δ
cose
e
.
y
Если ввести входное воздействие α, то
выражение для функции частной погрешно-
Рис. 5.14. Передача сти будет иметь вид:
от кулачка к толкателю
(
)()
α
+Δ= ϕ
α
Δ
cosey
e
.
2. Найти частную погрешность выходного перемещения толкателя
γ
Δ
y в
γ
Δ
. зависимости от перекоса оси кулачка
Рассмотрим перекос оси кулачк ь
корпусе определяется точкой взя
высоте
а (рис. 5.15а). Пуст положение кулачка в
О, той в центре среднего сечения кулачка на
2b
. Пунктиром показано
среднего сечения π расположена горизонтально
плоскости π. Перекос оси кулачка относительно оси вала, на который он насажен,
определяем как поворот на угол
идеальное положение кулачка. Плоскость
(рис.5.15б). Ось
Оу лежит в
γ
Δ
оси кулачка вокруг прямой АА, лежащей в
образует с осью
Оy угол ости π среднего сечения кулачка. Прямая АА
плоск
γ
ψ
.
Точка ние
С
*
. Проекция дуги
*
отрезок ОD, расположенный
малой разность между дугой
С
* *
С верхнего торца займет после перекоса оси положе
СС на плоскость среднего сечения π дает
ерпендикулярно прямой
АА. Считая пренебрежимоп
С и отрезком СС , принимаем:
γΔ=γΔ=≈
**
b
CCCOD
2
O
. (5.27)
Δγ
b
*
2
b
π
*
O
y
α
Δ
y
γ
ψ
γ
C
C
O
y
D
C
A
A
C
E
2
ψ
γ
π
*
а) б)
Рис. 5.15. Схема перекоса оси кулачка: а – плоска
С достаточным приближением перекос оси кулачка можно рассматривать как
эксцентриситеты торцов кулачка, направленные в противоположные стороны.
я; б – пространственная
60