Слепова С.В. Основы теории точности измерительных приборов
Подождите немного. Документ загружается.

или
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎛
∂
ϖ∂
~
W
θϕ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
θϕ∂
∂
ϕ∂
ϖ∂
+θ
θ∂θ∂
∫∫
Ω
)(
3)(
3)(
)(
sin
)(
~
)(sin
k
k
m
k
m
dd
HW
H
k
P
θϕ
⎟
⎠
⎞
⎜
⎝
⎛
ϕε+ϕεθΛ
ϕ∂
ϖ∂
−=
∫∫
Ω
dd
k
kk
m
)(
)sincos(sin
~
)(
2
)(
1
2
(
M, Nm ×= 1
). (10.23)
границе области k функция давления задана краевыми условиями (10.13).
естными являются значения функции в узлах, расположенных внутри
(k)
. Следовательно, искомые узловые значения функции давления в
содержатся в уравнениях (10.23) с номерами
На
Неизв
области Ω
области k
111 −+−= d, M)M(dm
;
12 −= , Nd
ческих
. Таким образом, получена система (N – 2)(M – 2) линейных алгебраи-
уравнений относительно
)(
~
k
t
p , которая в матричной форме имеет вид
)()()( kkk
CPA
=
. (10.24)
Компоненты квадратной матрицы
)(k
A и матрицы-столбца
)(k
С
определяются
по формулам:
θϕ
⎥
⎦
⎢
⎣
⎡
θϕ∂
ϖ∂
ϕ∂
ϖ∂
+θ
θ∂
ϖ∂
θ∂
ϖ∂
=
∫∫
Ω
dd
H
H
k
k
tm
k
tm
k
, t
)(
sin
(
⎤
A
m
)
~
~
sin)(
~
~
3)(
3)()(
, (10.25)
θϕ
⎥
⎦
ϕ ddε
k
)sin
)(
2
. (10.26)
⎤⎡
ϖ∂
~
⎢
⎣
+ϕθΛ
ϕ∂
−=
∫∫
εC
k
k
m
k
m
)(
cos(sin
)(
1
2)(
ии з оне
.16), то при нахождении двумерных интегралов (10.25), (10.26)
коэффициентов , внутри вычислительной области Ω
(k)
не
вносят только элементы A, B, C, D, примыкающие к узлу m, совпадающему с
узлом t или (i j) (см. рис. 10.7).
В результате дискретизации граничных условий (10.7) по
Ω
Так как весовые и пробные функц адаются на каждом к чном элементе
формулами (10
)(k
m
C
)(k
m, t
A
нулевые вклады
лучаем
⎪
⎭
⎪
⎬
−===
===
+−+−+−+−
+−
. Ni pp, pp
Mj p, p
I
MMi
II
Mi
II
MMi
I
Mi
jMN
j
)1,2(
~~~~
);,1(1
⎫
kk
~
1
~
)1(1)1()1(1)1(
)1(
(10.27)
Две системы н й (10.24) при k = I и k = II и равенства (10.27) совместно
представляют линейную алгебраическую систему уравнений для вычисления
искомых сеточных значений ф
)()(
урав ени
ункции давления в зазоре гидродинамического
под авим в виде
A P = C,
(10.28)
где
P – олбец, составленный из искомых узловых значений функ
веса. В матричной форме полученную систему уравнений предст
ст ции давления
)(
)(
~
k
i j
k
t
pp =
; C – столбец, состоящий из коэффициентов, обусловленных
дискретизацией краевой задачи;
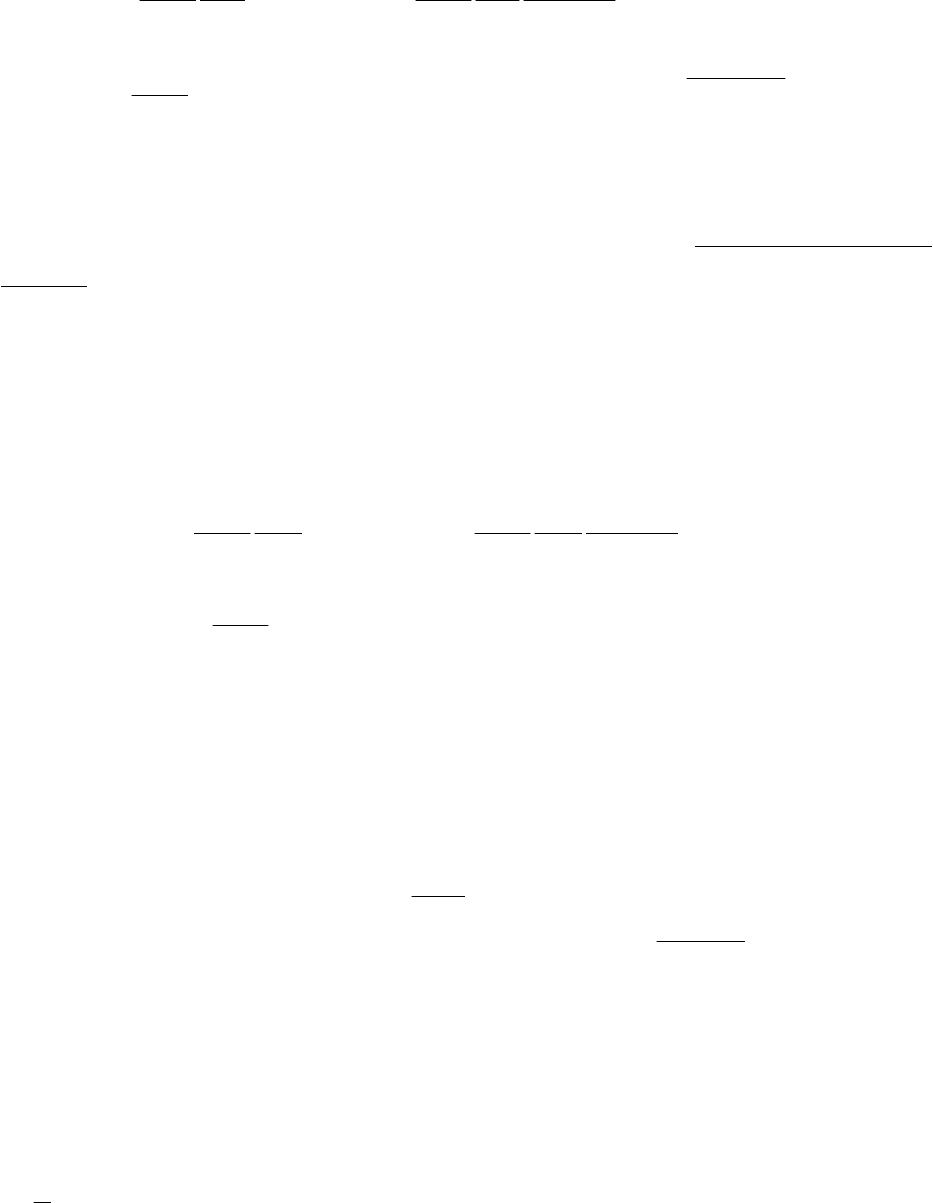
A – квадратная разреженная матрица почти
девятидиагональной структуры с локальными отклонениями, элементы которой
171
обусловлены дискретизацией. Ненулевые элементы a
s q
матрицы А расположены
по указанным на рис. 10.8. диагоналям и в отмеченных (×) узлах.
Решив систему линейных
алгебраических уравнений (10.28),
найдем распределение давления в
зазоре гидродинамического подвеса
шарового гироскопа.
Для решения систем линейных
алгебраических уравнений высокого
порядка с ленточной структурой
эффективным
а
ении прогонки
матрицы, расположенных под главной диа
алгоритм Томаса непосредственно примен и
матрица
А не является строго ленточной. В
Томаса, в которой учитываются особенности х э
матрицы
А.
По распределению давления определяют
и з
матрицы
А является
построенный н основе метода
Гаусса обобщенный алгоритм
Томаса. Основная идея состоит в
многократном повтор
Рис. 10.8. Структура матрицы А вперед с целью последовательного
исключения диагональных элементов
гональю. В рассматриваемой задаче
ить невозможно, так как сходная
ыполнена модифицикация алгоритма
расположения ненулевы лементов
ся напряжения на поверхности ротора
атем результирующие гидродинамические силы и моменты.
Результирующая гидродинамическая реакция подвеса
F , как и в схеме А,
равна
III
FFF
+
=
.
Проекции
)31( , i F
xi
= результирующей гидродинамической силы на оси СКx
i
статора представляем в виде
xi
Fxi
FKF = ,
где
2
2
л;
RpK
oF
π=
– масштабный коэффициент для си
II
xi
I
xixi
FFF += –
безразмерные проекции реакции жидкости:
⎪
⎪
⎪
⎭
⎪
⎪
⎪
−=
θθϕϕ+ϕϕ
∫
ππ
π
pF
, d dp dp
I
sin[
1
sin]coscos
00
⎬
⎫
θθϕϕ+ϕϕ
π
π
−=
∫∫∫
∫∫
πππ
π
π
πππ
F
, d dp d
F
x
II
x
III
x
sin]sin
[
1
2
3
2
2
00
2
2
2
1
(10.29)
θθθϕ+ϕ
π
−=
∫∫∫
π
. d dp dp
III
sincos][
1
00
172
Главный момент реакций жидкости
O
M , приложенный к ротору, равен сумме
моментов
I
O
M и
II
O
M . Введя масштабный коэффициент для моментов
δπμω=
4
2
RK
М
, записываем
)(
II
Oxi
I
Oxi
M
Oxi
MOxi
MMKMKM +==
( 31, i = ).
Безразмерные величины возмущающих моментов для гироскопа
, ,
и
в вид интегралов
1Ox
M
2Ox
M
момента сопротивления его быстрому собственному вращению
3Ox
M
находятся е :
, d d
H
Hp
H
p
II
II
sincoscos)
sin
3sin
(sin
0
θθ
⎥
⎥
⎦
⎢
ϕθ
θΛ
+
θ∂ϕ
∂
+ϕ
∂θ
∂
+
∫∫
π
d d
H
Hp
M
II
IIII
I
I
I
Ox
}
sincoscos)
sin
3sin
({
3
2
00
1
ϕ
⎤
⎢
⎣
⎡
+ϕθθ
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
ϕθ
θΛ
+
θ∂ϕ
∂
∂θ
∂
πΛ
=
∫∫
π π
ππ
H
p
I
I
sin
+ϕ
+ϕθθ
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
ππ
p
I
I
3
ϕθ
θΛ
+
θ∂ϕ
∂
+ϕ
∂θ
−
πΛ
=
∫∫
d d
H
Hp
HM
I
I
I
Ox
sinsincos)
3
sin
sin
(cos{
00
2
, d d
H
Hp
H
p
II
II
II
II
II
}sinsincos)
sin
3sin
(cos
2
0
ϕθθ
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
ϕθ
θΛ
+
θ∂ϕ
∂
+ϕ
∂θ
∂
−+
∫∫
π
π
π
(10.30)
. d d
H
Hp
d d
H
Hp
M
II
II
II
I
I
I
Ox
∫∫
∫∫
π
π
π
ππ
ϕθθ
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
θΛ
−
θ∂ϕ
∂
−+
+ϕθθ
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
θΛ
−
θ∂ϕ
∂
−
πΛ
=
2
0
2
2
00
3
}sin
sin
3sin
sin
sin
3sin
{
3
Так как распределение давлений по поверхности сферы ротора получено
численно в виде значений в соответствующих узлах расчетной сетки, то проекции
результирующих гидродинамических сил и моментов, представляющих собой
двойные интегралы по переменным θ и ϕ, находятся также численным методом с
помощью схемы Симпсона.
10.4. Алгоритмы определения характеристик гидроподвесов,
подвесов, выполненных соответственно по схеме А
(см. рис. 10.2а) и по схеме В (см. рис. 10.2б):
выполненных по схемам А, В
Полученные в пп. 10.2.–10.3 уравнения и формулы позволяют сформулировать
последовательность операций для вычисления значений функции давления и
реакций гидродинамических
173
1
о
–
давления в камере, ω тора; геометрических
характеристик: R
2
– радиуса ротора, δ – разности радиусов полости статора и
рот
. Ввод параметров подвеса: μ – динамического коэффициента вязкости, p
– угловой скорости вращения ро
ора, величин относительных смещений центра ротора ε
i
(
31, i =
) вдоль
координатных осей СКx
i
; величины χ сдвига центров сегментов I и II; угла
ориентации вектора сдвига φ; усечений полусфер I и II, составляющих статор,
I
i
χ
,
II
i
χ
(i = 3 – для схемы А , i = 2 – для схемы В); количества узлов сетки в
областях I, II по переменным θ, ϕ соответственно: N, M.
2. Нахождение шагов равномерной сетки по переменным θ, ϕ и узловых
значений переменных θ
i
(
,Ni 1=
), ϕ
j
(
,Mj 1=
).
3. Вычисление безразмерных параметров: параметра Λ по формуле
)(6
22
2
для хем
o
pR δωμ=Λ ;
с ы А: присвоение параметрам
I
i
λ
и
II
i
λ
(
51, i =
) значений относительных
смещений центра ротора и параметров погрешностей геометрии
е относительных ичин (
согласно (10.1), (10.2);
для схемы В: нахождени вел
)(k
i
ε 31, i =
; k = I, II) по
формулам
δ=ε
)()( k
i
k
i
e с учетом (10.10), (10.11).
распределения
4. Определение давления слоя жидкости
сеточных у
прогонки для решения систем линейных
структуры
= I ;
для схемы А: вычисление коэффициентов равнений, полученных на
основе дифференциальных уравнений (10.5), (10.6);
применение алгоритма
алгебраических уравнений трехдиагональной с целью
определения функций
i
k
j
i
k
j
Y, X )()(
)()(
(k , II
4
;
1,j =
, ni 1= );
вычисление значений функции распре узловых деления давления
0.7). p(θ
i
, ϕ
j
) ≡ p(
i
k
j
i
k
j
Y, X )()(
)()(
,ϕ
j
) по формуле (1
для схемы В: вычисление коэффициентов c
s
(
m s ,1=
; m = (N – 2)L; L = 2M – 2)
матрицы
С и коэффициентов a
s q
(
mq s ,1, =
) матрицы A матричного
уравнения (10.28) с учетом (10.25), (10.26);
приведение матрицы
А ольному в к верхнетреуг иду и нормализация
ен
к единице коэффициентов главной диагонали полученной матрицы;
вычисление знач ий
)(
~
k
(
t
p
, mt 1= ) методом обратной прогонки;
нахождение ных значений функции искомых сеточ распределения
давления
)(k
i j
p
(k = I, II; 1−i ; 2= , N
11 −= , Mj
) путем
переобозначения
)(
)(
~
k
t
k
i j
pp =
.
174

5. Нахожд ента дение масштабного коэффици ля сил
2
2
безразмерных
RpK
oF
π= ; значений
проекций
xi
F
(
31, i =
) результирующей реакции подвеса на оси
по формулам (10.8)
функции одной пе ;
СКx
i
статора
для схемы А: методом Симпсона численного интегрирования
ременной
для сленного и
ние масштабного коэффициента для моментов
схемы В: по формулам (10.29) методом Симпсона чи нтегрирова-
ния функции двух переменных.
6. Вычисле
δπμω=
4
2
RK
М
и
сопротивлени
для рования Симпсо
размерных значений проекций результирующих
значений безразмерных возмущающих моментов и безразмерного момента
я
для схемы А: по формулам (10.9) с помощью метода интегрирования Симпсона
функции одной переменной;
схемы В: по формулам (10.30) с помощью метода интегри на
функции двух переменных.
7. Определение
гидродинамических сил
xi
F
и моментов
Oxi
M
(
31, i =
):
xi
Fxi
FKF = и
Oxi
соответственно.
MOxi
MKM =
погрешностей идродинамического подвеса гироскопа
(АП – в ь кот
р и ля ЭВМ в РосАПО [26
о моделирования распределени
давления и реак ческих подвесов, выполненных по схеме А –
пло с х т
л
но для реальных гидродинамических
по
5
ρ = с
при рабочей ает значения
R
2
= 0,6⋅10
–3
м; 1, альное значение
радиального зазора между статором и ротором при концентричном положении
сфе
На основе приведенных алгоритмов разработана программа «Анализ
геометрии сферического г
Г СГПГ)» системе Турбо-Паскал 7.0, на орую получено
Свидетельство об официальной ег страции программы д ].
Программа предназначена для численног я
ций гидродинами
ско ть смещения усеченны и имеющих полюсные о верстия сферических
сегментов, составляющих статор, перпендикулярна оси вращения ротора – и по
схеме В – вектор сдвига центров оснований сегментов ежит в плоскости,
проходящей через ось вращения ротора.
10.5. Численные оценки влияния погрешностей формы статора
на реакции гидродинамического подвеса
миниатюрного шарового гироскопа
Численное моделирование проведе
двесов с параметрами: давление в камере p
о
= 5⋅10 Па; плотность жидкости
1,75⋅10
3
кг/м
3
= 7,4⋅10
–4
Па⋅; динамический коэффициент вязкости жидкости μ
температуре t
о
= 50
о
С; радиус ротора приним
185⋅10
–3
м; 1,5⋅10
–3
м; 2,5⋅10
–3
м; номин
р составляет δ = 5⋅10
–6
м; угловая скорость вращения ротора ω = 3,14⋅10
3
–
18,85⋅10
3
рад/с; плотность материала ротора ρ
р
= 8⋅10
3
кг/м
3
.
175
К вопросу левитации ротора в идеальном гидродинамическом подвесе.
Определяются равновесные положения главной оси ротора в случаях
неподвижного и движущегося с постоянным переносным ускорением о нования.
При условии идеального сферического подвеса (χ =
I
3
χ
=
II
3
χ
= 0) с параметрами
R
2
= 1,185⋅10
–3
м и ω = 6,28⋅10
3
рад/с уравновешивание силы тяжести ротора
гидродинамической силой достигается при относительн
с
ом эксцентриситете
ε =
а с н 5 0 ⋅1
ю
5,95⋅10
–5
. При перегрузках от переносных ускорений в 10g и 100g величина
эксцентриситет ε оказывается оответствен о равной ,95⋅1
–4
и 5,95 0
–3
.
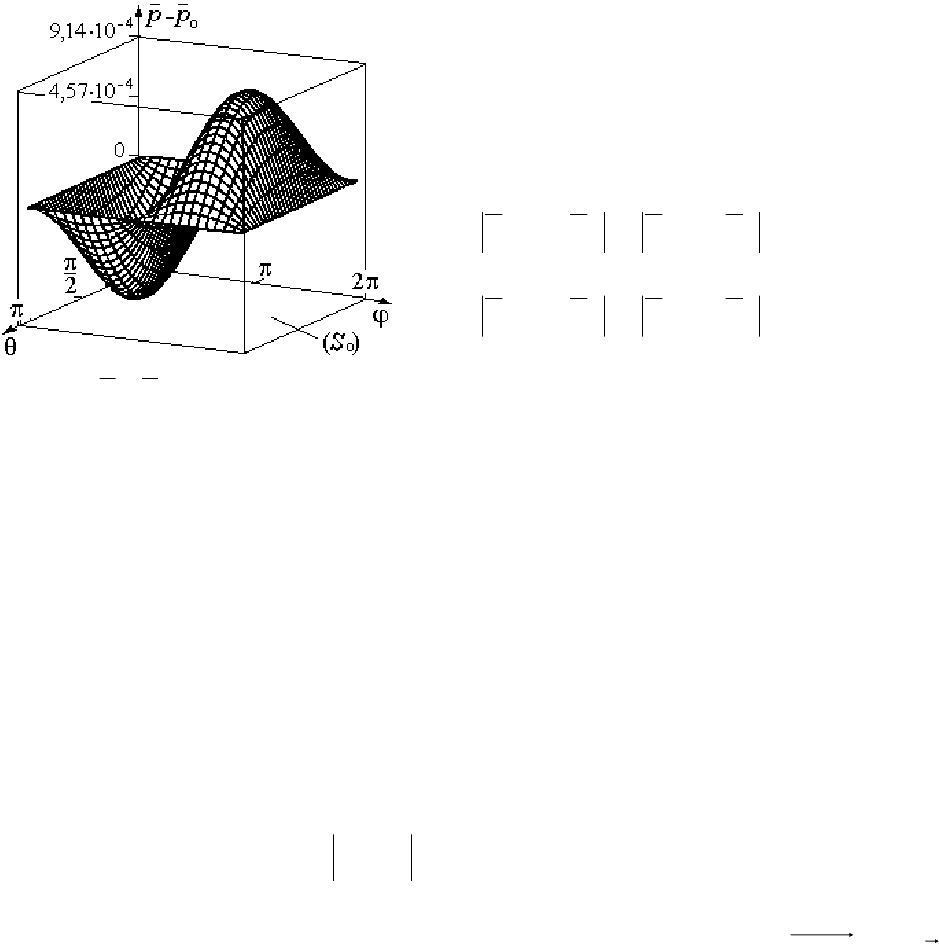
На рис. 10.9 показана поверхность функции распределения избыточного
давления при ε = 5,95⋅10
–4
. Поверхность имеет малу несимметричность вдоль
координатной оси θ, которая на приве-
денном графике незаметна. Качественный
вид поверхности не зависит от значений
относительного эксцентриситета, изменяя-
я мютс лишь максимальные и инимальные
значения избыточного давления:
при ε =5,95⋅10
–5
:
o
pp −
max
=
o
pp −
min
= 9,14⋅10
–5
;
при ε = 5,95⋅10
–3
(перегрузка 100g):
o
pp −
max
=
o
pp −
min
= 9,14⋅10
–3
.
Отрицательные значения избыточного
(S
o
):
o
pp −
= – 9,14⋅10
–4
. отно-
Рис. 10.9. Поверхность льных центрисит ,
функции распределения
избыточного давления грузках,
шающих 1000g.
Безразмерный коэффициент эквато
ука парам
ожение оси ротора
рас в м
давления появляются при больших
сите экс етах. Так
например, ε > 0,49 для рассматриваемого
миниатюрного ротора при пере
превы
риальной жесткости для подвеса с
занными етрами имеет значение 2,072. Масштабный коэффициент для
перехода к размерному значению коэффициента экваториальной жесткости есть
K = 4,412⋅10
5
Н⋅м.
g
Влияние погрешностей формы каркаса статора на результирующие
реакции и равновесные положения центра ротора.
Пол
сматривается системе координат, связанной с каркасо статора.
Принимается, что
центры
I
x
O и
II
x
O сферических сегментов, составляющих
каркас статора не совпадают:
χ=
II
x
I
x
OO (см. рис. 10.2а, б). За полюс
x
O
СКx
i
ста
*
тора выбран центр
x
O
сегмента I. Центром подвеса назовем точку O ,
занимающую среднее положение между точками
I
x
O и
II
x
O :
I
χ= OO
*
x
5,0
(рис. 10.10а, б). Т гд положение центра O отора в СК
i
с атора определяется
векторным равенством
о а р тx
176
*
e+ ,
где
e χ= 5,0
*
e
– вектор смещени ентра O ротора относительно центра подвеса O
*
.
я ц
O
x
x
1
2
x
e
*
*
e
2
χ
x
1
O
O
χ
*
I
O
,
O
2
x
*
m
g
р
φ
cos
0,5
cos
=
x
+
x
=
x
+
x
(э)
(э)
(э)
x
(э)
O
x
O
O
O
,
x
x
x
I
x
m
g
р
x
x
x
x
x
x
x
O
e
e
e
e
e
e
e
e
а) для схемы А б) для схемы В
Рис. 10.10. Векторы смещений в плоскости О
x
x
1
x
2
Проекции относительного эксцентриситета
ε
в рассматриваемой задаче
записываются соответственно для схем А и В:
*
,
11
cos50
*
,
22
sin50 ε+φχ=ε
, ;
*
33
ε=εε+φχ=ε
,
*
, cos50 ε+φχ=ε ,
*
ε=ε ,
*
, sin50 +φχ=ε
11 22 33
.
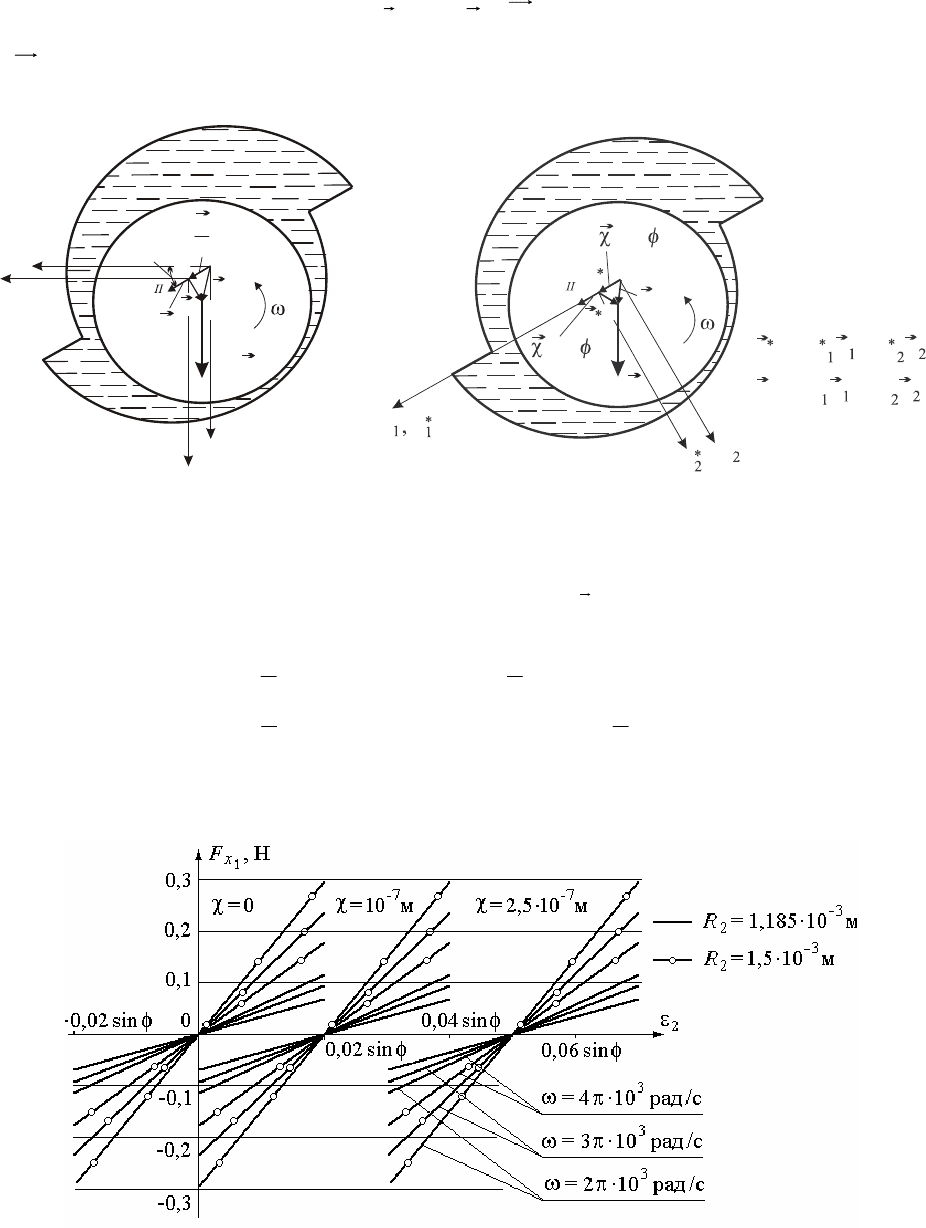
А зависимости проекции гидродинамической
ε
В случае схемы силы от
про
1x
F
екции ε
2
относительного эксцентриситета показаны на рис. 10.11.
Рис. 10. 11. Зависимости гидродинамической реакции
от проекции относительного эксцентриситета
Графики построены при различных значениях радиуса ротора R
2
, угловой
скорости ω и заданных величинах сдвига χ центров сегментов, составляющих
1x
F
2
ε
177
каркас статора. Зависимости
)(
12
ε
x
F
при тех же параметрах подвеса аналогичны.
Величины проекций результирующей гидродинамической силы
возрастают при увеличении ротора и угловой скорости его вращения.
Значения проекций не зависят от величины сдвига χ центров сегментов
и угла ориентации вектора
1x
F
,
2x
F
радиуса
1x
F
,
2x
F
φ
χ.
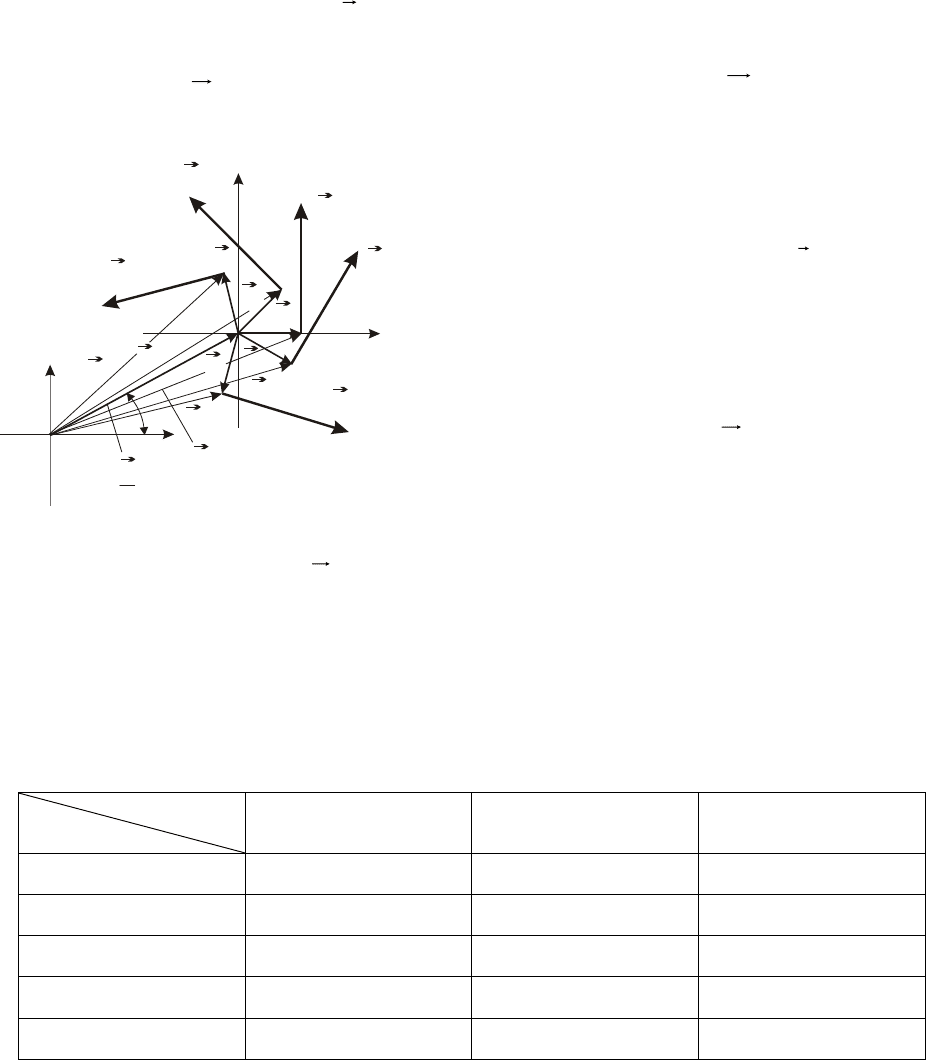
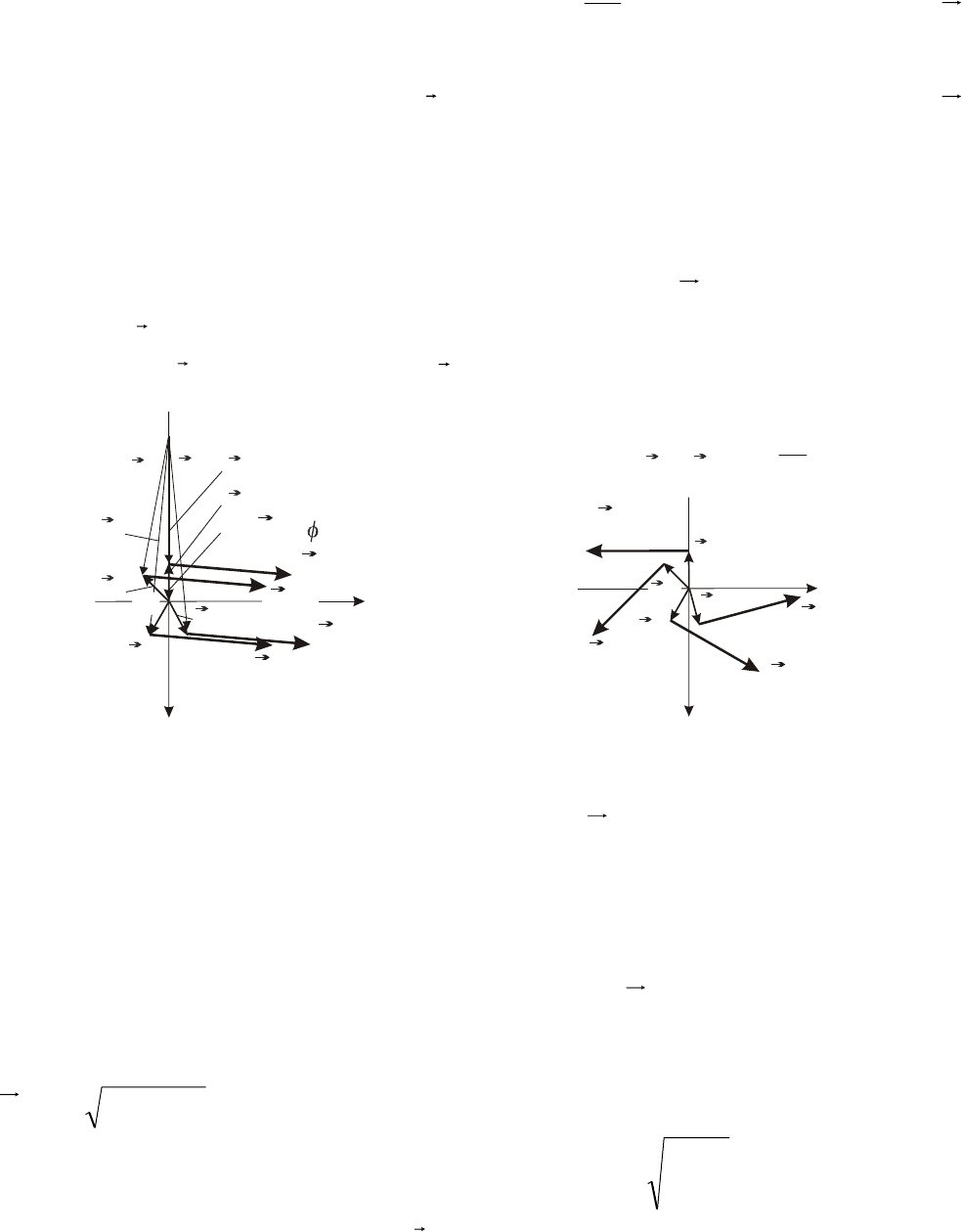
Диаграмма расположения векторов результирующих гидродинамических
реакций подвеса и соответствующих векторов смещения
*
e
пр
всех
показаны
F
центра O ротора
относительно центра подвеса O
*
изображена на рис. 10.12. На диаграмме векторы
сил рассматриваются иложенными к
центру О ротора для представленных
положений, также соответствую-
тащие векторы эксцентрисите
e
относитель-
подвесов с
⋅
–3
но полюса
x
O
статора. Для
параметрами: R
2
= 1,185 10 м;
ω = 15,7⋅10
3
рад/с; ε
*
= 0,001 и R
2
= 1,5⋅10
–3
м;
ω = 9,42⋅10
3
рад/с; ε
*
= 0,0001 модули
гидродинамических сил
F
равны 1,15⋅10
–2
Н
и 1,77⋅10
–3
Н соответственно.
С помощью такой диаграммы можно оп-
Рис. 10.12. Вектор диаграмма ределять равновесное положение центра ро-
гидродинамических сил
ная
F
тора с учетом перегрузки от переносных
R
2
, м
ω, рад/c
1,185·10
–3
·
ускорений.
Величины относительных смещений ε
*
в задаче левитации без перегрузки
( Fgm =
р
) для схемы А зависят от радиуса ротора R
2
и угловой скорости ω, как
Таблица 10.1
1,5·10
–3
2,5 10
–3
приведено в табл. 10.1.
3,14·10
3
–
*
– ε = 1,13·10
–4
6,28·10
3
ε
*
= 1,19·10
–4
ε
*
= 9,41·10
–5
ε
*
= 5,65·10
–5
9,42·10
3
ε
*
= 7,94·10
–5
ε
*
= 6,28·10
–5
–
1,26·10
4
ε
*
= 5,95·10
–5
ε
*
= 4,70·10
–5
–
1,57·10
4
ε
*
= 4,76·10 –
–5
ε
*
= 3,41·10
–5
Данные в таблице дают представление о величинах относительных смещений
ε
*
, которые оказываются весьма малыми. При перегрузках от переносных
ускорений в 10g и 100g величины ε
*
возрастают в 10 и 100 раз соответственно.
F
F
F
F
F
O
x
x
1
2
x
O
*
x
1
2
*
x
*
1
2
4
3
e
*
e
*
3
5
e
*
2
1
e
*
e
*
φ
4
5
e
1
e
2
e
5
e
4
e
3
2
χ
178
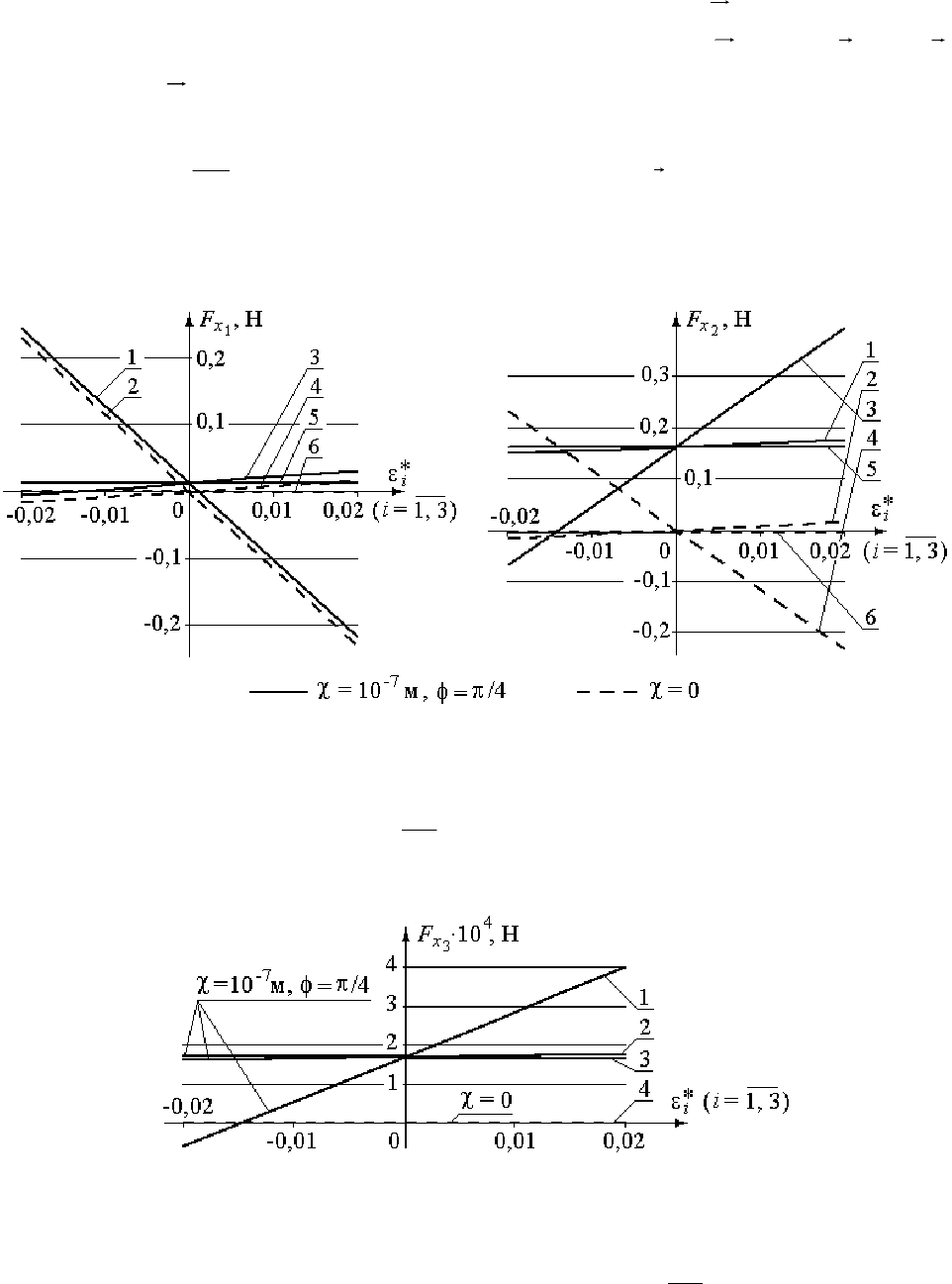
В подвесе, представленном схемой В, вектор
F
результирующей
гидродинамической силы имеет не только экваториальную
F
(экв)
2
2
1
1
xFxF
xx
+=
,
но и осевую
3x
составляющие – если величина сдвига χ ≠ 0. Зависимо
экваториальных
F
,
F
и осевых
F
проекций гидродинамических сил
F
сти
от
про
1x 2x 3x
*
ε
екций
*
i
ε
(
31, i =
) относительного эксцентриситета показа . 10.13,
10.14 д еса с пара и R
2
= 1,18
–3
м, ω = /с и
указанны инами ов се
ны на рис
ля подв метрам 5⋅10 15,71⋅10
3
рад
ми велич сдвига χ центр гментов.
Г и 1, 2:
)(
*
1
ε
xi
F
; 3, 4:
)(
*
2
ε
xi
F
; 5, 6:
)
*
3
ε
xi
F
; i = 1, 2.
Рис. 10.13. Зависимости экваториальных проекций
x
F
*
рафик
, гидродинамических
сил от проекций (
(
1 2x
F
i
ε
31, i = ) отн сительного эксцентриситета
о
Графики 1, 4: ; 2, 4: ; 3, 4: .
Рис. 10.14. Зависимости осевых проекций гидро-
х проекц
)(
*
13
ε
x
F )(
*
23
ε
x
F )(
*
33
ε
x
F
3x
F
динамически сил от ий
*
i
ε
(
31, =
)
i
относительного эксцентриситета
179
Если цент с т совпадают
(χ ≠ 0), то значения проекций (
ры сегментов, ос авляющих каркас статора, не
) главного вектора
F
xi
F 31, i =
гидродинамических сил зависят от экваториальных и осевой
составляющих вектора смещения
*
1
ε
,
*
2
ε
*
3
ε
*
ε
. Величины осевых проекций вектора
F
1
значительно меньше значений экваториальных проекций:
3
3
10
xx
FF
−
≈
,
. Осевая составляющая является практически постоянной, и
осевая жесткость не обнаруживается.
На рис. 10.15а, б изображены диаграммы взаимного расположения
экваториальных составляющих гидродинамических сил
2
3
3
10
xx
FF
−
≈
3x
F
F
(экв)
и экваториальных
смещений
*
e
(э)
центр относительно а O
*
, а также
составляющих
а O ротора центр подвеса
e
(э)
эксцентриситетов
e
.
*
χ
0,5
O
*
F
F
F
2
x
2
x
*
1
F
2
4
2
4
3
11
1
3
O
x
x
x
*
,
,
2
*
4
*
*
1
3
(экв)
(э)
(экв)
(экв)
(экв)
(э)
(э)
(э)
(э)
(э)(э)
(э)
cos
e
e
e
e
e
e
e
e
F
F
F
2
x
2
x
*
1
F
2
O
4
1
2
4
3
O
x
*
3
11
,
x
x
*
,
,
(экв)
(экв)
(экв)
(экв)
(э)
*
i
( ) = 1, 4
i
=
(э)
()
э
(э
i
e
e
= /4 =
соста
()
э
e
(э)
)
e
e
e
а) χ = 10
–7
м;
φ
π б) χ = 10
–7
м;
φ
π/2
Рис. 10.15. Векторные диаграммы экваториальных вляющих
гидродинамических сил
F
(экв)
Векторные диаграммы (см. рис. 10.15а, б) соответствуют гидродинамическому
подвесу с параметрами R
2
= 1,185⋅10
–3
м; ω = 15,71⋅10
3
рад/с; ε
*
=
*
ε
(э)
= 10
–4
;
χ = 10
–7
м. При ориентации
φ
= π/4 сдвига центров сегментов (см. рис. 10.15а)
направления экваториаль х составляющих ны
F
(экв)
главных векторов
гидродинамических сил почти совпадают во всех положениях центра О ротора
относительно центра О
*
подвеса. Величины экваториальных составляющих
F
(экв)
2
2
2
1 xx
FF +=
3x
F
≈ 1,68
одинаковы и равны ≈ 0,164 Н. При этом значения осевых
проекций ·10
–4
Н. Отклонения вели
∑
=
=
1i
xi
FF ,
3
2
вычисленных при чин
различных направлениях вектора
*
e
(э)
, от их среднего значени состая вляют не
более 0,67 ют силу
инерции ротора от перенос
%. Полученные гидродинамические силы F уравновешива
ных ускорений ≈ 298g.
180