Слепова С.В. Основы теории точности измерительных приборов
Подождите немного. Документ загружается.

где A – экваториальный момент инерции шарового ротора; H – кинетический
момент гироскопа в собственном вращении; b – коэффициент сопротивления
вращению в гидроподвесе; k
1
, k
2
– коэффициенты электромагнитных моментов,
характеризующих взаимодействие намагниченного ротора с электрическими
обмотками статора; , – проекции возмущающих моментов со
стороны гидроподвеса на оси Резаля;
гидр
Oy
M
1
гидр
Oy
M
2
1
~
Oy
M
,
2
~
Oy
M
– проекции возмущающих
моментов, обусловленных другими факторами; ζ
1
, ζ
2
, ζ
3
– оси, связанные с
платформой;
21 ζζ
ω
ω , – составляющие угловой скорости платформы; α, β – углы
поворота гироскопа относительно платформы.
При позиционной цепи стабилизации электромагнитные моменты двигателя
вызывают дрейф платформы гиростабилизатора. Введением интегрально-
позиционной цепи стабилизации влияние этих моментов на дрейф платформы в
установившемся режиме (0
=
α
,
0
=
β
) исключается. Тогда основными
возмущающими моментами становятся гидродинамические моменты,
обусловленные инструментальными погрешностями изготовления и сборки
каркаса статора. Является актуальной задача оценки этих моментов и
результирующих гидродинамических сил, приложенных к ротору гироскопа.
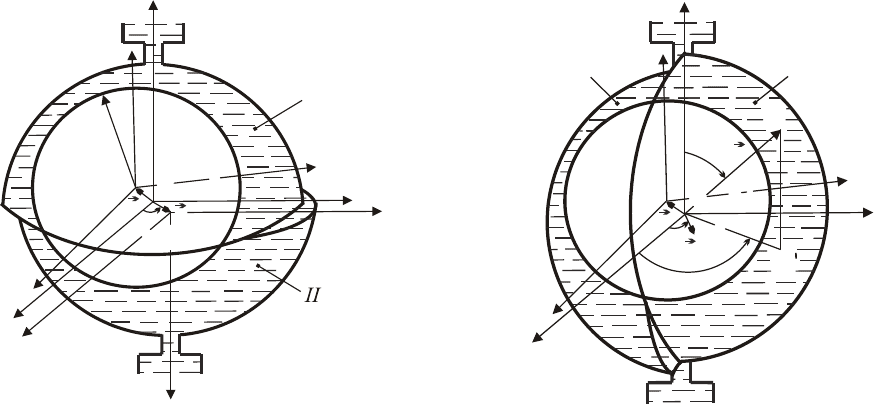
10.1. Постановка задачи
Шаровой ротор выполняет установившееся вращение с угловой скоростью ω
вокруг горизонтальной оси в неподвижной полости статора. Каркас статора
составлен из двух полусферических сегментов. Предполагается, что отклонения
главной оси ротора Oz
3
относительно оси статора O
x
x
3
малы и ими можно
пренебречь при определении реакций подвеса. Исследуются схемы
гидродинамических подвесов с учетом геометрических погрешностей в виде
усечения и сдвига центров сегментов: в схеме А плоскость смещения усеченных
сферических сегментов, составляющих статор, перпендикулярна оси вращения
ротора (рис. 10.2а); в схеме В вектор сдвига центров оснований сегментов лежит в
плоскости, проходящей через ось вращения ротора (рис. 10.2б). Геометрические
параметры отверстий таковы, что они не являются ограничителями расхода
поступающей в зазор жидкости.
161
1
2
3
x
x
2
x
3
z
z
z
e
А
Б
x
3
x
3
,
II
I
I
R
2
2
2
x
1
1
II
x
x
,
I
x
x
,
I
1
φ
χ
x
,
I
x
II
О
О
О
О
1
2
3
x
x
3
z
z
z
e
r
А
Б
I
II
2
1
x
x
φ
χ
x
,
I
x
II
θ
ϕ
M
M
О
О
О
О
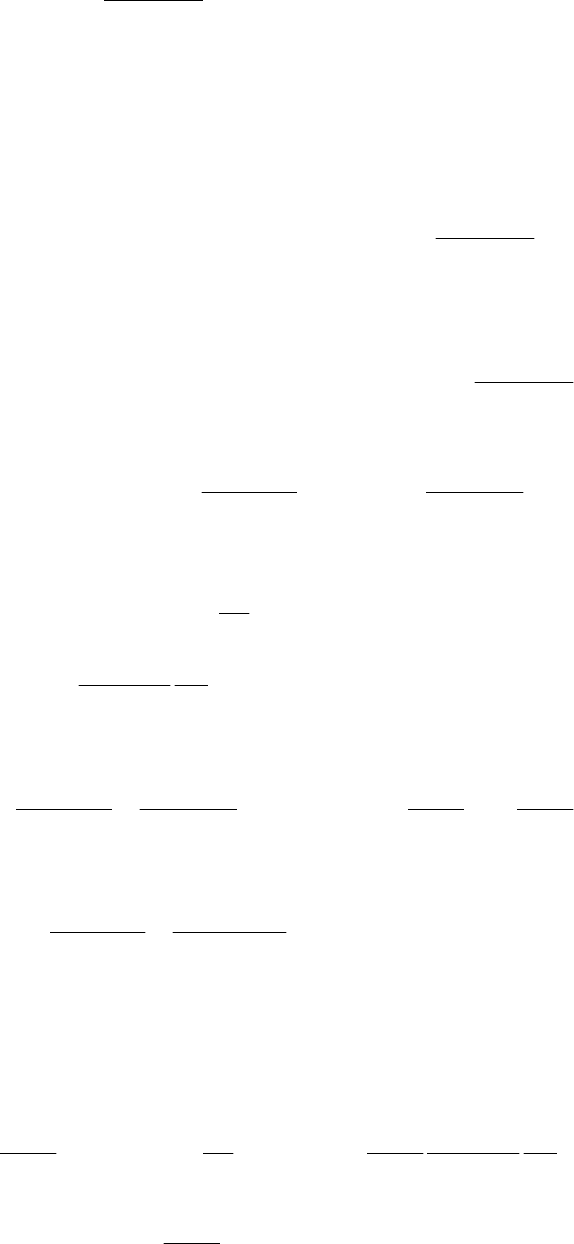
а) схема А б) схема В
Рис. 10. 2. Расчетные схемы гидродинамического подвеса
Течение тонкого слоя ньютоновской несжимаемой жидкости в зазоре подвеса
изучается в соответствии с классическими допущениями гидродинамической
теории смазки: режим течения жидкости принимается ламинарным и
изотермическим, жидкость рассматривается как сплошная безинерционная среда
с динамическим коэффициентом вязкости, не зависящим от давления. При таких
допущениях уравнение для распределения давления в слое жидкости принимает
вид уравнения Рейнольдса.
10.2. Определение реакций гидроподвеса для расчетной схемы А
В случае
схемы А (см. рис. 10.2а) пространство между статором и ротором
разделим на две области, граничащие в плоскости экватора (плоскости сдвига):
область I соответствует сегменту I, область II – сегменту II. Введем системы
координат (СК): связанную со статором , связанные с сегментами
(k = I, II), полюсы расположены в центрах оснований сегментов. Принимаем,
i
Ox
)(
)(
k
i
k
x
xO
)(k
x
O
162
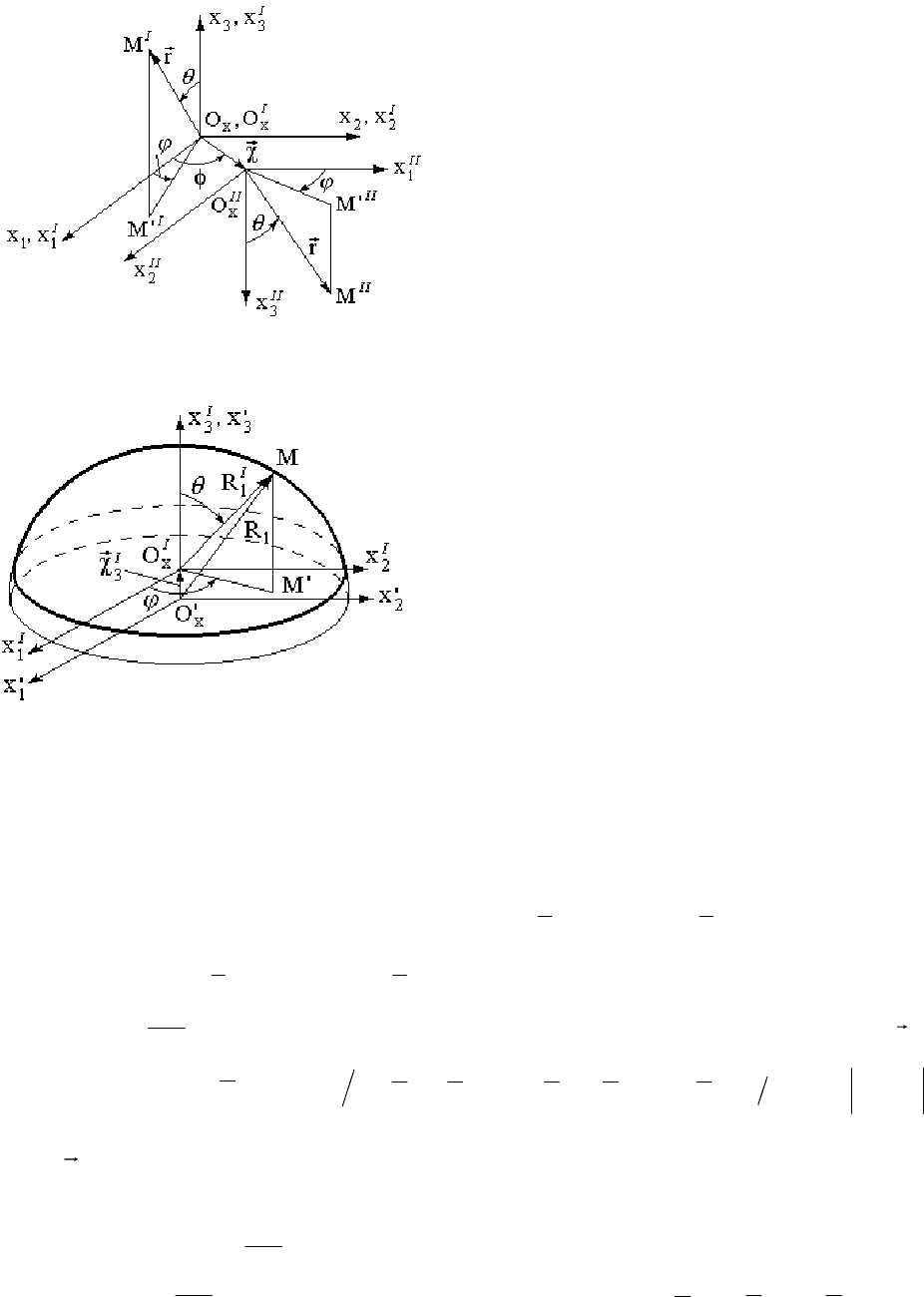
что координатные оси и
i
Ox
I
i
I
x
xO
совпадают. Величины, относящиеся к
областям I и II, запишем с индексами
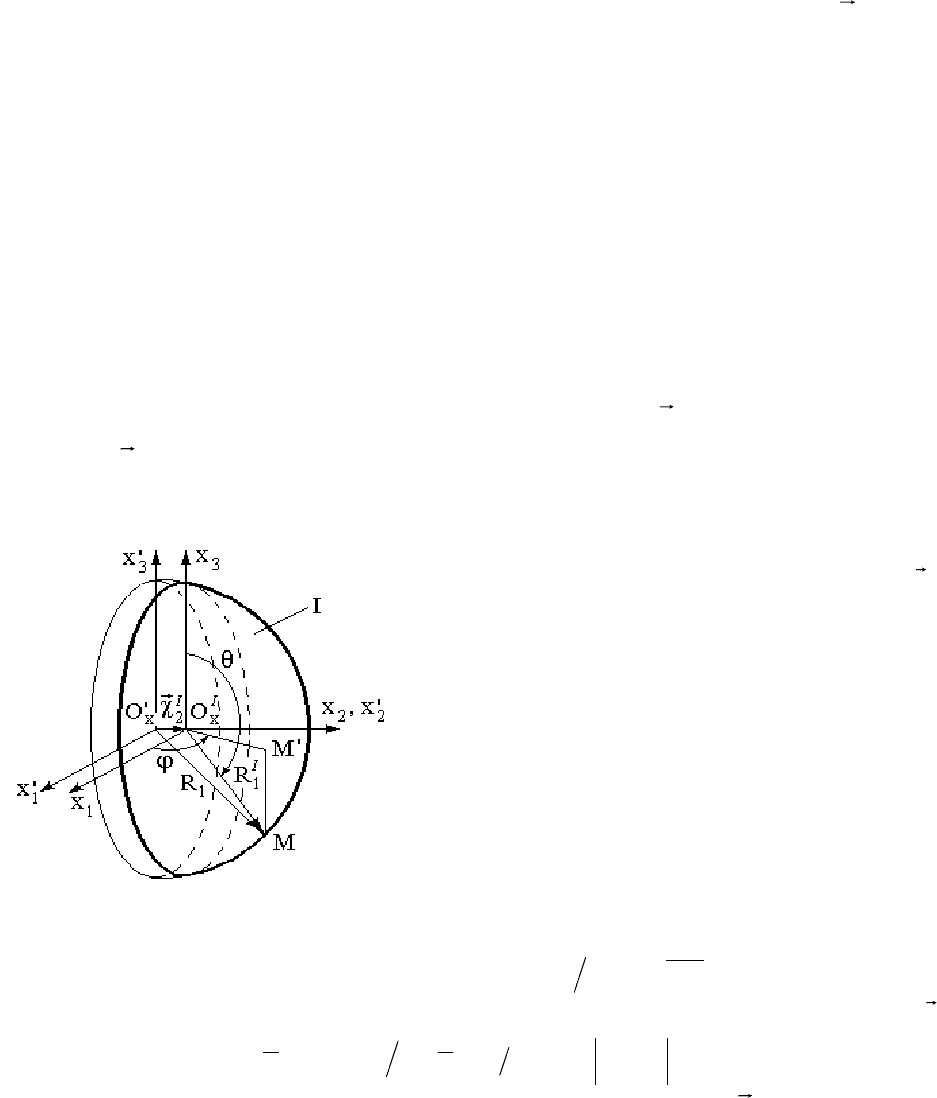
I и II соответственно. Сферические
координаты r, θ, ϕ отсчитываем, как
показано на рис. 10.3: в области I
в СК
i
x
(r
I
∈
[0,
R
1
], θ
I
∈
[0, π/2],
ϕ
∈
[0, 2π]); в области II – в СК
II
i
x
(r
∈
[0,
II
], θ [0, ], ϕ
R
1
∈
π/2
∈
[
Рис. 10.3. Системы координат та-
тора в СК приближенно записы-
)( kk
олусферы вдоль ос
К
0, 2π]).
Уравнения поверхностей I и II с
)(k
i
x
ваются в виде
θ−= cos
3
1
1
χRR
,
)(
где R
1
– радиус сферы статора;
)(
3
k
χ
–
усечение k-той п и
)(k
3
x
(рис. 10.4).
Положение центра О ротора в
С
)(k
x определяется вектором
)(
e
k
r
. В
i
обла сительная величина
зазора в радиальном направлении с
сти k отно
Рис. 10.4. Усечение полусферы I и ж
вдоль оси
i=
где
тем е приближениями записывается
I
x
3
в виде
)()(
)(
1
k
i
k
i
k
HH
∑
λ−= ,
5
1
121
ε=λ=λ
III
;
212
ε=λ=λ
III
;
1
43
χ=λ=λ
III
;
2
34
χ=λ=λ
III
; (10.1)
I
I
3
35
χ+ε=λ
;
II
II
3
35
χ+ε−=λ
; (10.2)
(
δ=ε /e
k
xi
i
)(
31, i =
) – зразмерные начения проекций вектобе з ра смещения
e
на
оси ; δ = R
1
– R
2
;
i
Ox
δχ=χ
)(
3
)(
3
k k
,
II
x
I
x
OO=χ –
φ
χ
=
χ
cos
,
1
φ
χ
=
χ
sin
2
,
δχ=χ
,
модуль вектора сд
га
вига центров сегментов I и II, φ – угол ориентации вектора
сдви
χ (см. рис.
=
ϕ
1
II
,
0
43
== HH
,
ϕθ−= cossin
3
H
,
ϕθ−= sinsin
4
H
,
θ== cos
55
HH
.
Величины
)(
i
λ
(
10.2а, 10.3);
= cossin
21
III
HH
,
2
I
HHϕθ θ== sinsin
II II II III
k
51, i =
), определя а емые относительными смещениями центр
ротора ε
j
(
31, j =
) и погрешностями геометрии
I
χ
3
,
II
3
χχ
, , могут
рассматриваться как малые параметры.
163
Течение ж ост азоре подвеса описывается уравнениями Рейнольдса.
краевые услови пр ли ания» для скоростей, полу д ер ци льное
уравнение для распределения давления:
идк и в з
Рассматривая эти уравнения совместно с уравнением неразрывности и используя
я « и п чим ифф ен а
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂ϕ
∂
∂ϕ
∂
+
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
θ
∂θ
∂
∂θ
∂
θ
3)(
)(
3)(
)(
)(sin)(sin
k
k
k
k
H
p
H
p
(
)
ϕνλ−λ−ϕνλ−λθΛ−= sin)(cos)(sin
)(
)(
3
)(
1
)(
)(
4
)(
2
3)( k
kk
k
kk
k
l
, (10.3)
)(k
p
o
k
k
ppp
)(
)(
=
; – безразмерное давление в области k; где p
o
– давление в
камере;
1=
I
l
;
1−
=
II
l
; ;
10 =ν=ν
III
,
)(6
22
2 o
pR δωμ=Λ
.
При постановке краевой задачи для распределения давления
давление координат θ, ϕ
принимаем
следующие условия:
• является непрерывной функцией и периодической
функцией с периодом 2π по координате ϕ:
),(),(p π+ϕθ=ϕθ 2 ;
•
жидкость непрерывно заполняет зор
p
k(k ))(
за ;
ловия непрерывности и
•
отверстия не являются ограничителями расхода, поэтому давление под
отверстиями А и Б принимается равным давлению в камере;
•
на границе областей I и II выполняются ус давления
местных меридиональных расходов.
Тогда краевые условия для функций
),(p
k
ϕθ
)(
записываются в виде:
[][]
⎪
⎭
⎪
⎪
∂
π=θπ=θ
,)()(
2
3
2
II
pHpH
где r
*
– радиус отверстия.
Функцию давления приближенно представим в виде лин
разложения в ряд по степеням малых параметров :
⎪
⎬
∂θ−=∂θ∂
ϕπ=ϕπ )2()2(
3
III
I
,,/p,/p
(10.4)
⎫
=θ=ϕθ 1)(
111
)(
III
*
k
,Rr, ,p
ейной части простого
)(k
i
λ
∑
=
λ+=
1i
ii
o
PPp .
Функции первого приближения приводятся к в :
5
)()(
)(
)(
kk
k
k
иду
−=====ϕ+ϕ=
=
.P
l, l
l, l l; l, i YXlP
,P
k
III
IIIIII
kkkk
k
o
0
),11
),1131(cossin
1
)(
5
42
31
)()()()(
)(
⎪
⎪
⎭
⎪
⎪
⎬
⎫
=
−=====ϕ−ϕ= l; l, j XlYP
III
k
j
k
j
k
j
k
j
iiii
42(cossin
42
)()()()(
31
164
),;41()()(
)()()()(
III k, m Y, YXX
k
m
k
m
k
m
k
m
==θ=θ=
Функции находятся
решением восьми краевых задач вида:
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎬
⎫
θ−=θ==θ
==θ=θ
θΛν=−
⎥
⎦⎣
:при Z Z
dd
III
(10.5)
⎤
⎢
⎡
θ
θ
θ
θ
θΛν=−
θ
θ
θ
θ
++
+
+
+
+
;;:2при
;0
;sinsinsin
;sin)(sinsin
11
11
2
1
1
2
1
ddZddZ Z Zπ/
Z
dZd
Z
d
dZ
d
d
II
i
I
i
II
i
I
i
ii
II
Z
II
i
II
i
I
Z
I
i
I
i
i
i
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎬
⎫
θ=θ−=π=θ
==θ=θ
θΛν=−
θ
θ
θ
θ
θΛν=−
θ
θ
θ
θ
++
+
+
+
+
,;:2при
;0:при
;sin)(sinsin
;sin)(sinsin
11
11
2
2
1
1
1
ddZddZ Z Z/
Z Z
Z
d
dZ
d
d
Z
d
dZ
d
d
II
i
I
i
II
i
I
i
II
i
I
i
II
Z
II
i
II
i
I
Z
I
i
I
i
i
i
(10.6)
где
Y
X
Z
,=
; i = 1, 3;
41, =
.
01
)()()(
4343
21
I, II; j; k,
k
Y
I
X
I
X
II
X
II
X
k
X
k
X
j
==ν=ν=ν=ν=ν=ν=ν
Применение метода малых возмущений позволило свести решение двумерной
краевой задачи (10.3), (10.4) к восьми краевым задачам для обыкновенных
дифференциальных уравнений второго порядка (10.5), (10.6), которые решаются
енным м троятся разностные схемы интегроинтерполяционным
дом на равномерной сетке. Разностные уравнения приводятся к системам
линейных алгебраических уравнений трехдиагональной структуры, которые
реш
числ етодом. С
мето
аются методом прогонки. По известным значениям функций
),;4,1(
)()(
III k m , YX
k
m
k
m
==
находится распределение давления
)(k
p в области k
+ϕ−ϕλ+ϕ+ϕλ+= )XlY)YX(lp
k
k
kkk
k
k
k
cossincossin1
)(
2
)(
)(
2
)(
2
)(
1
)(
1
)(
)(
1
)(
)Xl(Y)YXl(
k
k
kkkk
k
k
ϕ+ϕλ++ϕ−λ+ cossincossin
)(
4
)(
)(
4
)(
4
)(
3
)(
3
)(
)(
3
(10.7)
(l
I
= 1, l
II
–1).
жидкости на поверхности ротора пределим в
(
k
=
Рассматривая напряжения , о
соответствии с принятыми приближениями проекции на оси статора главного
вектора
ϕ
i
Ox
)(k
F
и проекции главного момента гидродинамических сил
(k
O
M
области. Результирующие гидродинамическая реакция подвеса
)
в k-той
F
и момент
O
M соответственно равны: реакций подвеса
III
FFF
+
= ;
II
O
I
OO
MMM += .
165
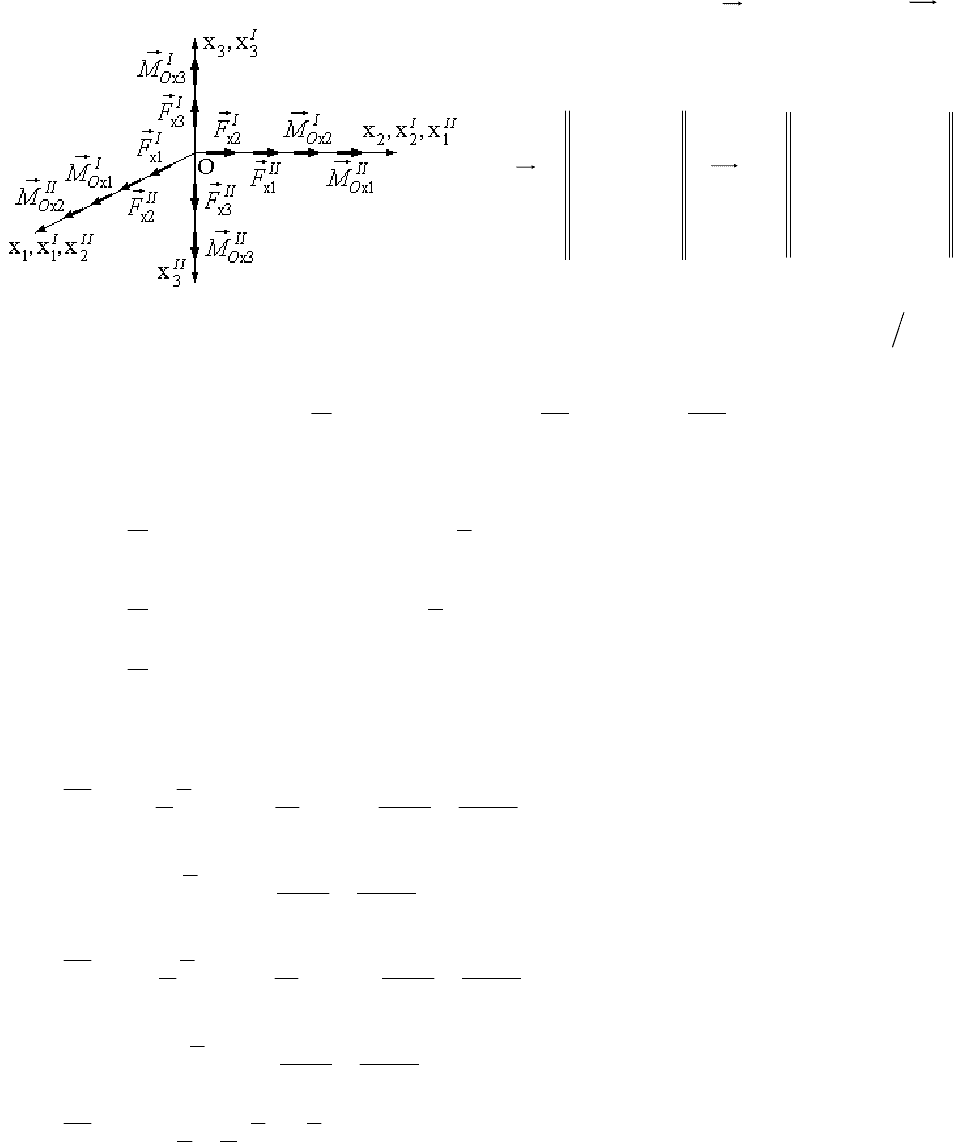
Проекции силы
F
и мо а мент
O
M
на оси СКx
i
стато находим
согласно рис. 10.5:
ра
III
FF
x3x3
−
II
III
FF
FF
F
xx1
+
+
=
;
I
2
x1x2
II
O
I
O
MM
x3x3
−
II
O
I
II
O
I
O
O
MM
MM
M
x1
x2x1
+
+
=
.
коэффициенты
,
O
x2
Введя масштабные
Рис. 10.5. К определению реакций подвеса
2
2
RpK
oF
π= δπμω=
4
2
RK
М
,
запишем значения сил и моментов
xi
Fxi
FKF = ,
Oxi
MOxi
MKM = (
31, i =
).
Соответствующие безразмерные величин ы определяются в виде интегралов:
⎪
⎪
⎪
= .F 0
0
⎭
⎪
⎬
⎫
θθ+φχ+ε−=
θθ+φχ++ε−−=
∫
π
dXXXF
x
II
/
x
III
n(cos([
3
2
311
2
2
(10.8)
⎪
⎪
∫
dXXXXF
x
;sin)](sin)([
34122
0
1
π
III
/
2
2
−X
IIII
;si)])
42
{
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎪
⎪
⎪
−
⎥
⎦
θ
⎬
⎫
χ+χ−−=
θ
⎥
⎦
⎤
⎢
⎣
⎡
θ−+θ
θ
−
θ
φχ−
−
⎥
⎦
⎤
⎢
⎣
⎡
θ−+θ
θ
−
θΛ
+φχ=
θ
⎥
⎦
⎤
⎢
⎣
⎡
θ−+θ
θ
−
θ
φχ−
⎤
⎢
⎣
⎡
−+θ
θ
−
θ
ε
Λ
+φχ=
∫
∫
.M
dXX
d
dX
d
dX
XX
d
dX
d
dX
εM
dXX
d
dX
d
dX
XX
d
dX
d
dX
M
III
Ox
III
III
III
III
π/
Ox
III
III
III
III
π/
Ox
)(
2
1
3
8
;}cos)(sin)(sin
cos)(sin)({
3
sin
4
1
;}cos)(sin)(cos
cos)(sin)(
3
cos
4
1
33
3
34
34
12
12
2
0
2
2
43
43
21
21
2
0
1
1
(10.9)
Величины , представляют возмущающие моменты для гироскопа,
величина – момент сопротивления его быстрому собственному вращению.
Интегралы безразмерных проекций гидродинамических сил и моментов
вычисляются с помощью квадратурной формулы Симпсона.
1Ox
M
2Ox
M
3Ox
M
166
10.3. Определение гидродинамических реакций подвеса
для расчетной схемы В
В расчетной схеме В гидродинамического подвеса (см. рис. 10.2б)
учитываются производственно-технологические погрешности в виде усечения и
сме енщ ия деталей статора, вектор сдвига центров сегментов
χ леж
, проходящей чер
ит в
плоскости
Пространство между ст на две области: область I
оо
ез ось вращения ротора.
атором и ротором разделим
с тветствует сегменту I, в ней r
∈
[0,
I
R
1
], θ
∈
[0, π], ϕ
∈
[0, π]; область II –
сегменту II, в ней r
∈
[0,
II
R
1
], θ
∈
[0, π], ϕ
∈
[π, 2π]. Все величины, относящиеся
к этим областям, будем записывать с индексами I и II соответственно.
Поверхности I и II в СКx
i
статора описываются уравнениями:
,
1
е о
⎭
⎬
⎫
θφ+ϕθϕ−ϕθχ−=
ϕθχ−=
),cossincossin(cossinsin
sinsin
21
211
IIII
II
RR
RR
где R
1
– радиус идеальной сферы статора; χ – модуль в кт ра сдвига центров
сегментов I и II; φ – угол ориентации вектора сдвига
φ
χ (угол между осью O
x
x
1
и
вектором
χ) (см. рис. 10.2б); – усечение полусферы k вдоль оси k = I, II;
на рис. 10.6 показано усечение полусферы I вдоль оси x
2
.
)(
2
k
χ
)(
2
k
x
,
Положение центра ротора О в СКx
i
статора определяется вектором
e
. В
области k относительная величина зазора
в радиальном направлении з сывается
в виде
апи
; ; (10.10)
22
χ−ε
;
+ε=ε sin
33
II
; (10.11)
вдоль оси
−ϕθε−= cossin1
)(
1
)( kk
H
θε−ϕθε− cossinsin
)()( kk
,
32
где
φχ+ε=ε cos
11
II
11
ε=ε
I
;
II
χ
222
+ε=ε
IIII
2
=ε χ
33
ε=ε
I
;
φ
Рис. 10.6. Усечение полусферы I
I
x
2
δ=ε
)()( k
i
k
i
e
(
31, i
зн
=
) – безразмерные а-
проекций вектора смещения чения
e
на
оси ; δ = R
1
– R
2
;
II
x
I
x
OO=χ
δχ=χ
)(
2
)(
2
kk
, ,
i
Ox
δ
χ
=
χ
– модуль вектор
нтации вектора сдви а
а сдвига
центров сегментов I и II, φ – угол орие г
χ (см. рис. 10
ое распределения да
получено
.2б).
Дифференциальн уравнение для вления слоя жидкости
также, как и для схемы А:
167
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
+
∂
)(
)(
)(
(
1
)(
k
k
k
H
p
H
p
где
∂ϕ∂ϕ
∂
θ
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂θ
θ
∂θ
∂
3)(3
)
sin
sin
k
)(
kk
ϕε−ϕεθΛ= cossinsin
)(
2
)(
1
2
(k = I, II), (10.12)
)(k
o
k
k
/ppp
)(
)(
=
p – безразмерное давление в области k, ; p
o
– давление в
)(
камере;
6=Λ
22
2 o
pR δωμ
.
При постановке краевой задачи для распределения давления учитываются те
же допущения, что и для схемы А. Краевые условия записываются в виде:
),(
k
ϕθ
1
)(
= 1, p
I
p (θ, 0) =
II
p (θ, 0),
I II
p (p (θ, π) = θ, π), (10.1
где θ
1
= r
3)
*
/ R
1
(r
*
– радиус отверстия).
у
х узлах
области Ω решения краевой задачи разными методами. Дискретизация чаще всего
осуществляется с да х ей
ие интерполяционных функций, обеспечивающих непрерывность
дав
ся ф ) п
Уравнению в частных производных можно поставить в соответствие систем
алгебраических уравнений относительно значений функции в выбранны
помощью мето конечны разност и метода конечных
элементов.
В рассматриваемой схеме зазор терпит разрыв по координате ϕ с переменной
по координате θ «ступенькой». Учесть нерегулярности геометрии зазора
гидродинамического подвеса позволяет метод конечных элементов (МКЭ).
Элементы могут аппроксимировать границы любой конфигурации.
Использован
ления и массового расхода, дает возможность проводить анализ ступенчатых
конфигураций.
Для решения представленной двумерной краевой задачи (10.12), (10.13)
применяет МКЭ в ормулировке Галеркина. Уравнение (10.12 ереписываем в
дивергентной форме:
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂∂
=
3)(
)(
)(
)(
k
k
k
p
pL
∂θ∂θ
θ )(sin H
0)sincos(sin)(
sin
1
)(
)(
2
)(
1
23)(
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂∂
+
k
p
ϕε+ϕεθΛ+
∂ϕθ∂ϕ
kk
k
H
, (10.14)
– дифференциальный оператор.
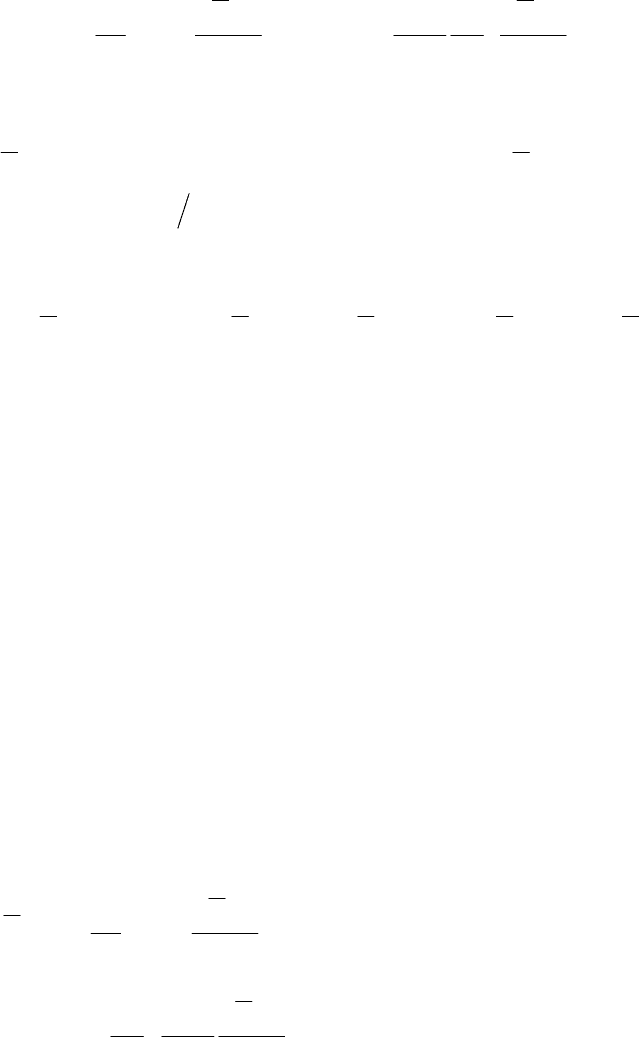
Поверхность чаши подвеса разбивается на четырехугольные конечные
элементы N параллелями и L меридианами по сферическим координатам θ ϕ
соответственно. Причем, линии координатной сетки, проходящие по м
ϕ = 0 и ϕ = π через полюсы сферы θ = 0, θ = π, разделяют поверхность на области
, (с
е т
)(⋅L
где
,
еридианам
I и II м. рис. 10.2б).
Приближенно решение краевой задачи (10.13), (10.14) записывае ся в виде
линейной комбинации пробных функций, коэффициентами которых являются
узловые значения искомой функции давления в области k (k = I, II)
168
)(
)(
)(
~
k
M N
k
p ,P
∑∑
ϕθϖ=
, (10.15)
11
j i
==
где ),(
i j
ϕθϖ – двумерные билинейные пробные функции;
i j
i j
)(k
i j
p
– значения
функции давления в узлах (i j), которым соответствуют координаты θ
i
и ϕ
j
в
области k.
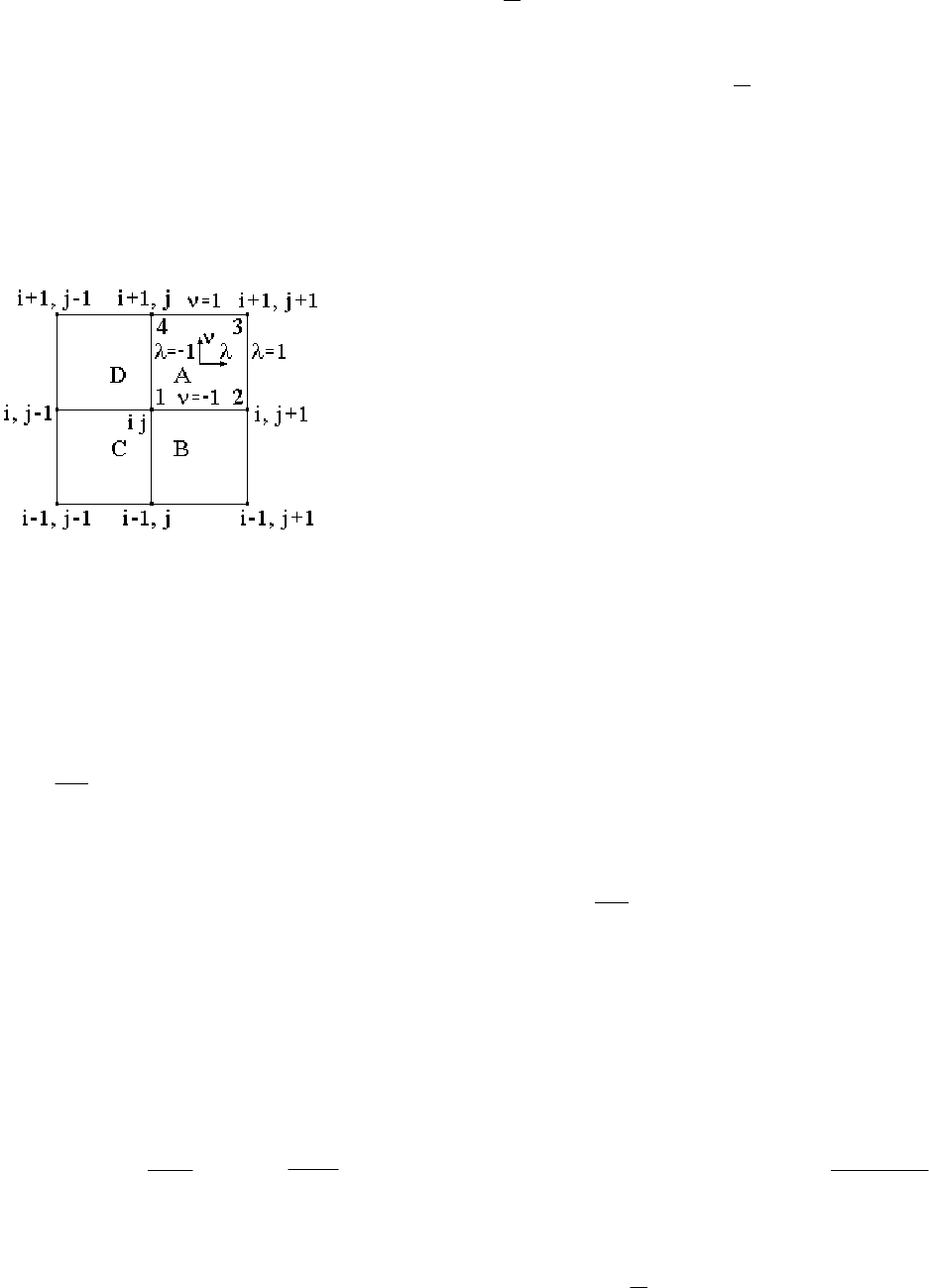
На каждом из элементов, примыкающем к узлу
функции
. Для этого в каждом конечном элементе вводим локальную
7) и
(i j), определяем пробные
)( ϕθϖ ,
i j
нумерацию узлов (рис. 10. локальные
координаты λ, ν (11 ≤
λ
≤
−
, 11
≤
ν≤− ).
Локальные координаты связаны с глобаль-
ϕ
j–1
+ ϕ )/2]/Δϕ;
локальная нумерация узлов
Билинейные пробные функци координат заданы
формулами:
(λ,ν) = 0,25(1+ ς
1u
⋅λ)(1+ ς
2u
⋅ν),
где
ными следующими соотношениями:
внутри элементов A, B
λ = 2[ϕ – (ϕ
j+1
+ ϕ
j
)/2]/Δϕ;
внутри элементов С, D
λ = 2[ϕ – (
j
внутри элементов A, D
ν = 2[θ – (θ
i+1
+ θ
i
)/2]/Δθ; Рис. 10.7. Глобальная и
внутри элементов B, C
ν = 2[θ – (θ
i–1
+ θ
i
)/2]/Δθ.
и в локальной системе
ϖ
u
u =
4 ,1
; ς = ς = ς = ς
11 14 21 22
= – 1, ς
12
= ς
13
= ς
23
= ς
24
= 1.
лПриведенные аппроксимирующие функции об адают след
инт ы
ующими
ерполяционн ми свойствами:
⎭
⎬
= случаев.других для 0
⎫
====
)ν,λ(
);4 ,1( νν ,λλ если ,1)ν,λ(
u
uuu
u
ϖ
ϖ
(10.16)
( ; λ , ν – значения
лок на
нного решения (10.15) в матричной форме
вводится сквозная нумерация узлов сетки: узлу (i j) соответствует новый узел с
номером t, причем
Здесь
ϖ
λ,ν) – значение функции в локальном узле u
u u u
альных коорди т λ, ν в узле u.
Для представления приближе
j
)
M
(
i
t
+
−= 1
.
и
, Mj 1=
, то индекс t принимает значения M, Nt ×= 1
Так как
, Ni 1= .
Следовательно, пробные функции и узловые значения функции давления
принимают вид
),(),(
~
ϕ
θ
ϖ
=
ϕθϖ
i jt
;
)(
)(
~
k
i j
k
t
pp =
.
Тогда приближе (10.15) нное решение в области k представим в виде
169
)()(
~
kk
P
PW
=
, )
где
W – матриц -строка, компонента и которой являются б линейные пробные
функции
,(
(10.17
а м и
)
~
ϕθϖ
t
(k)
; P – столбец искомых узловых значений функции давления
)(
~
k
t
p
в области k; M, Nt ×= 1 .
е (10.14)
пол
После подстановки приближенного решения (10.17) в уравнени
учаем невязку ℜ
(k)
в области k
~
)(PL=ℜ .
С цель деления значений
)(
)()( kk
ю опре
~
k
t
p
потребуем, чтобы интеграл взвешенной
зки по всей выневя числительной области Ω
(k)
был равен нулю
0,
~
)(
)(
=θϕℜϕθϖ
∫∫
Ω
dd )(
k
m
k
(
M, Nm ×= 1
) , (10.18)
~
где
),( ϕθϖ
m
– весовая функция, которая согласно методу Галеркина выбирается
из того же семейства, что и пробные функции
),(
~
ϕθ
ϖ
t
; m – параметр,
соответствующий всем номерам t узлов сетки (
M, Nt ×= 1
).
В равенство (10.18) подставляем невязку:
0
)(
)(
~
)(
)(
~
)(
⎠⎝
ϕ∂θ∂
Ω
k
mm
Здесь использованы обозначения:
=θϕ
⎟
⎞
⎜
⎛ ϕθΦ∂
ϕθϖ+
ϕθΘ∂
ϕθϖ
∫∫
dd
,
,
,
,
. (10.19)
⎪
⎪
⎭
ϕ).
⎪
⎪
⎬
⎫
ε+ϕεθΛ+
ϕ∂
∂
θ
=ϕθΦ sincos(sin)(
sin
)(
),(
)(
2
)(
1
2)(
kk
k
H
P W
(10.20)
ное соотношение (10.19) в эквивалентном виде
θ∂
3)(
k
∂
θ=ϕθΘ ),()(sin),(
)(3)(
kk
H
P W
Запишем полученное интеграль
0
~~
)
~
()
~
(
)()(
=θϕ
⎥
⎦
⎤
⎢
⎣
⎡
ϕ∂
ϖ∂
Φ+
θ∂
ϖ∂
Θ−θϕ
⎥
⎦
⎤
⎢
⎣
⎡
ϕ∂
Φϖ∂
+
θ∂
Θϖ∂
∫∫∫∫
ΩΩ
dddd
kk
mmmm
. (10.21)
Первый интеграл в (10.21) преобразуем по формуле Грина:
0)
~~
(
)
~
()
~
(
)()(
⎥
⎦
⎢
⎣
ϕ∂θ∂
∫∫∫
Ω
mm
L
kk
=θΦϖ−ϕΘϖ=θϕ
⎤⎡
Φϖ−∂
−
Θϖ∂
dddd
mm
, (10.22)
где L
(k)
– граница области Ω
(k)
. Криволинейный интеграл берется по
(k)
пробегаемому в положительном направлении.
Сл ) и обозначений
(10.20 в
контуру L ,
едовательно, выражение (10.21), записанное с учетом (10.22
), принимает ид
=θϕdd
⎟
⎟
⎞
⎜
⎜
⎛
ϕ∂
∂
θϕ∂
ϖ∂
+
θ∂
∂
θ
θ∂
ϖ∂
∫∫
H
H
k
k
m
kk
m
)(
sin
)(
~
~
⎠⎝
Ω
k )(
)()(sin
)(
3)(
)(3)(
P WP W
θϕ
⎟
⎠
⎞
⎜
⎛
ϕεθΛ
ϖ∂
−=
∫∫
k
m
cos(sin
~
)(
1
2
⎝
ϕε+
ϕ∂
Ω
dd
k
k
)(
)sin
)(
2
170