Розенберг В.Я. Введение в теорию точности измерительных систем
Подождите немного. Документ загружается.

„ду чего его значения можно безошибочно предсказать для любого мо-
мента времени, а любые характеристики — получить расчетным путем.
Подклассами детерминированных процессов являются периодический, непериоди-
ческий, импульсный процессы.
Периодический процесс определим выражением
{з(():у1(=(— оо, оо); уг = 0, + 1, ±2, ...;
а
Г*>0; 5 (() = з (I + 1Т*)}, (2.44)
где Т* — период. Используя взаимно-однозначную связь временного и спектрального
..представлений з(1), введем эквивалентную модель
5(2) : да/, I, уг, I = 0, 1, 2,...; у2е(—со, со);
00 >
х
(о=2
81п
+?')>•
(2.45)
где а, и фг — амплитуда и фаза ('-гармоники соответственно, /=1/Г* — основная
частота. Таким образом признаком периодического процесса может служить дискрет-
ный характер аргумента комплексного ряда Фурье.
Непериодический процесс можно определить как альтернативный (2.44), (2.46).
Однако для того чтобы исключить подкласс детерминированных функций, не являю-
щихся периодическими, но имеющих дискретный спектр .(почти-периодические функ-
ции), потребуем, чтобы непериодические функции данного класса удовлетворяли еще
одному условию — имели ограниченную энергию Е
3
|5(*):Я
8
= |$2(2)^<со| . (2.46)
.Последнее выражение может служить определением импульса. Очевидно, к этому же
классу следует отнести совокупность неперекрывающихся импульсов произвольной фор-
мы — кодовую группу импульсов
п
= (2.47)
1=1
где п<оо— целое число. Частный случай кодовой группы — пачка (пакет) импульсов
п
1 = 1
где Т
с
— интервал следования.
Перекрывающиеся импульсы, сигналы вида
00
5(0 = й(0 2 8{{ — 1Т*), (2.49)
—со
(где а(1) —детерминированная функция), а также почти-периодические функции целе-
сообразно отнести к классу Моою.
К рассматриваемому классу можно также отнести квазйдетерми-
нированный процесс
\х
Ц);
у
*
е Т- х (0 =
5 ((,
а); р
п
(а) ф []
Ь{ш
-
а*,-)
| , (2.50)
I Г=1 ]
50
где 5 (•) —известная функция; а= («1, ..а
п
) —случайные параметры,,
совместная плотность вероятности которых есть р
п
(а). Сюда же отно-
сится случай, когда ортогональное разложение случайной функции
представляет собой ряд, содержащий конечное число членов. Заметим,
что детерминированный процесс можно рассматривать также как вы-
рожденный случай квазидетерминированного, а именно
л*
(0 : у' е Т, х (0 =
5
((, а), р„ (а) = {[ о (ш — |. (2.51)
(00000) Стационарные полные формальные скалярные модели про-
цессов задают стационарные в узком смысле процессы, все конечномер-
ные плотности вероятностей любого порядка которых инвариантны по
отношению к сдвигу моментов времени на любую величину
М
00000
= {а-(*, ш): I <Е Т, хе^С^
1
,
Ух, V1 = ТГп, уя, р
п
(х,
1)
= р
п
(х, ! + т)}. (2.52)
(00001) Нестационарные полные формальные скалярные модели
процессов, в противоположность (2.52), определяются как
М
00001
= {х((, |,
з- а 1=ТГп, а л. М*> ц^м*. *+Т)}. (2,53)
Вообще, процесс можно назвать /п-стационарным (т + 1-нестацио-
нарным), если
УМ^'-ИеД 1=Т~т, р
т
(х, г)ЕЕ=р
ш
(х,
*
+ г) ^
1з„ з1=1, гп-1-1, Рш+,(х, Г)фр
т+1
(х, 1+т).
Тогда при т= 1, 2, ... имеем стационарный в узком смысле про-
цесс (абсолютно стационарный), при т = 0—-абсолютно нестационар-
ный, при т=2 — стационарный в широком смысле (в смысле А. Я- Хин-
чина).
(0001) Неполные формальные скалярные модели процессов, в от-
личие от полных (2.25), характеризуются тем, что задана не сама веро-
ятностная мера Р, а некоторая совокупность вероятностных характери-
стик, имеющих вид операторов типа Рг(Р) (4=1, г), причем такая, что,
располагая ею, невозможно вновь восстановить Р. Сказанное можно,
записать в виде формулы
м
0001
={х({, х^ХаЯ\ шей, ь зР1(Р),
I = 177; ^Т
1
}, (2.55)
где д — знак отрицания высказывания д (читается: „не существует"),.
Р'
1
— оператор, обратный Р.
Весьма общим видом операторов Р{ является оператор математи-
ческого ожидания
Р(р
п
) = М{Пх
и
,...,х
{п
)} =
оо оо
= ^\(х
и
,... ,х
(п
)р
п
{х
и
, ... ,х
(п
)с1х
{1
,..., йх^, п'<п, (2.56)
—СЮ —ОО
4* 51
где /(•) — некоторая функция значений ,х
(
. Эквивалентные мо-
дели получаются путем взаимно-однозначного преобразования подоб-
ных вероятностных характеристик.
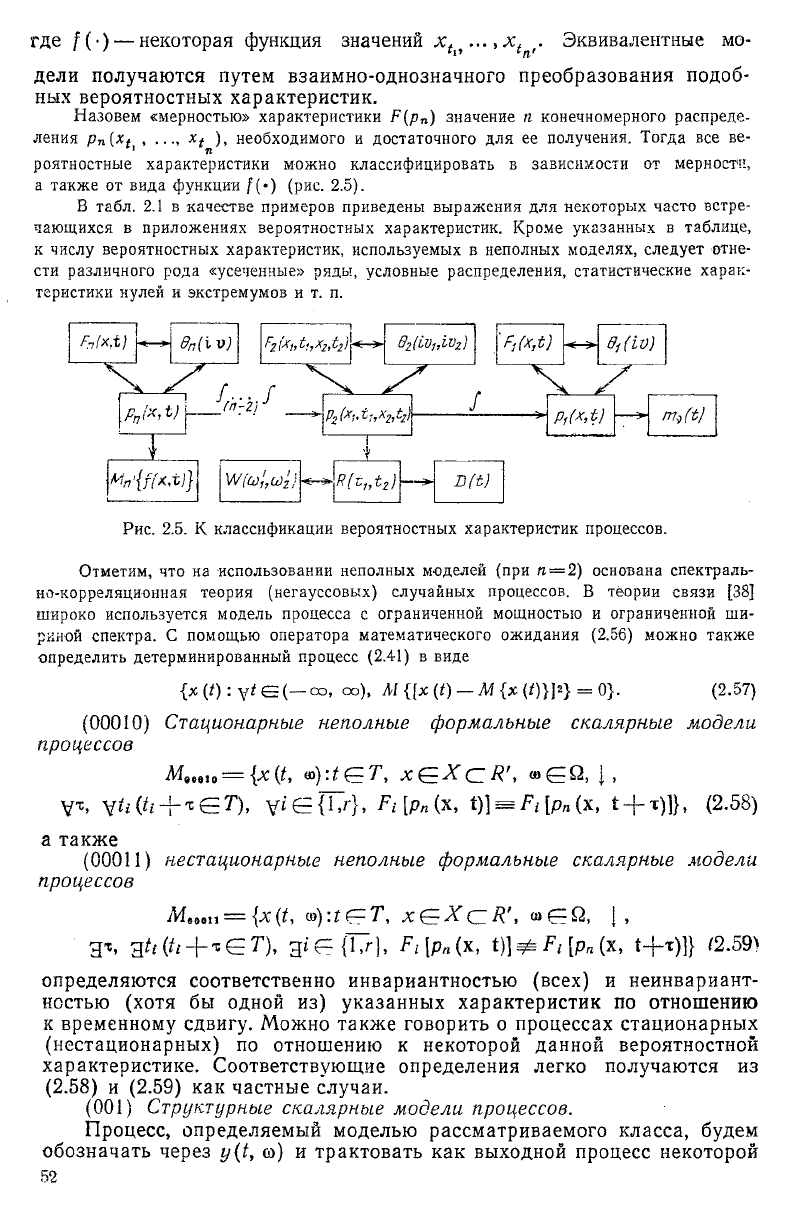
Назовем «мерностью» характеристики Р(р
п
) значение п конечномерного распреде-
ления рп{*1 , .. •, ), необходимого и достаточного для ее получения. Тогда все ве-
1
п
роятностные характеристики можно классифицировать в зависимости от мерности,
а также от вида функции }(•) (рис. 2.5).
В табл. 2.1 в качестве примеров приведены выражения для некоторых часто встре-
чающихся в приложениях вероятностных характеристик. Кроме указанных в таблице,
к числу вероятностных характеристик, используемых в неполных моделях, следует отне-
сти различного рода «усеченные» ряды, условные распределения, статистические харак-
теристики нулей и экстремумов и т. п.
шм
8л(ьх>)
Р
п
(х, Ь)
' р,(х,г)
в, (IV)
Ч
1 р
2
(х,Л
;
,х
2
&}
1
р,(х,Ь) р,(х,Ь)
Мп{г(х<Щ
У/('со}, Ь)г }
1
Рис. 2.5. К классификации вероятностных характеристик процессов.
Отметим, что на использовании неполных моделей (при п—2) основана спектраль-
но-корреляционная теория (негауссовых) случайных процессов. В теории связи [38]
широко используется модель процесса с ограниченной мощностью и ограниченной ши-
риной спектра. С помощью оператора математического ожидания (2.56) можно также
определить детерминированный процесс (2.41) в виде
{х (0 :у(е(— ОО, со), М {[х (0 — М{х (0)]»} = 0}. (2.57)
(00010) Стационарные неполные формальные скалярные модели
процессов
м,
ш
,={х(*. х^хс:Я', «ей, I,
V. Vу'е{Тг}, /чм*. = (2.58)
а также
(00011) нестационарные неполные формальные скалярные модели
процессов
м„
ши
= {х(и с*у.1€=т, х<=ха%', «е=й, 1,
З
х, зМН'еП н»€={Т7г}, р1 [рп (х, 1)}фР
1
[рп(х, 1+т)]} <2.59>
определяются соответственно инвариантностью (всех) и неинвариант-
ностью (хотя бы одной из) указанных характеристик по отношению
к временному сдвигу. Можно также говорить о процессах стационарных
(нестационарных) по отношению к некоторой данной вероятностной
характеристике. Соответствующие определения легко получаются из
(2.58) и (2.59) как частные случаи.
(001) Структурные скалярные модели процессов.
Процесс, определяемый моделью рассматриваемого класса, будем
обозначать через у(I, ю) и трактовать как выходной процесс некоторой
52
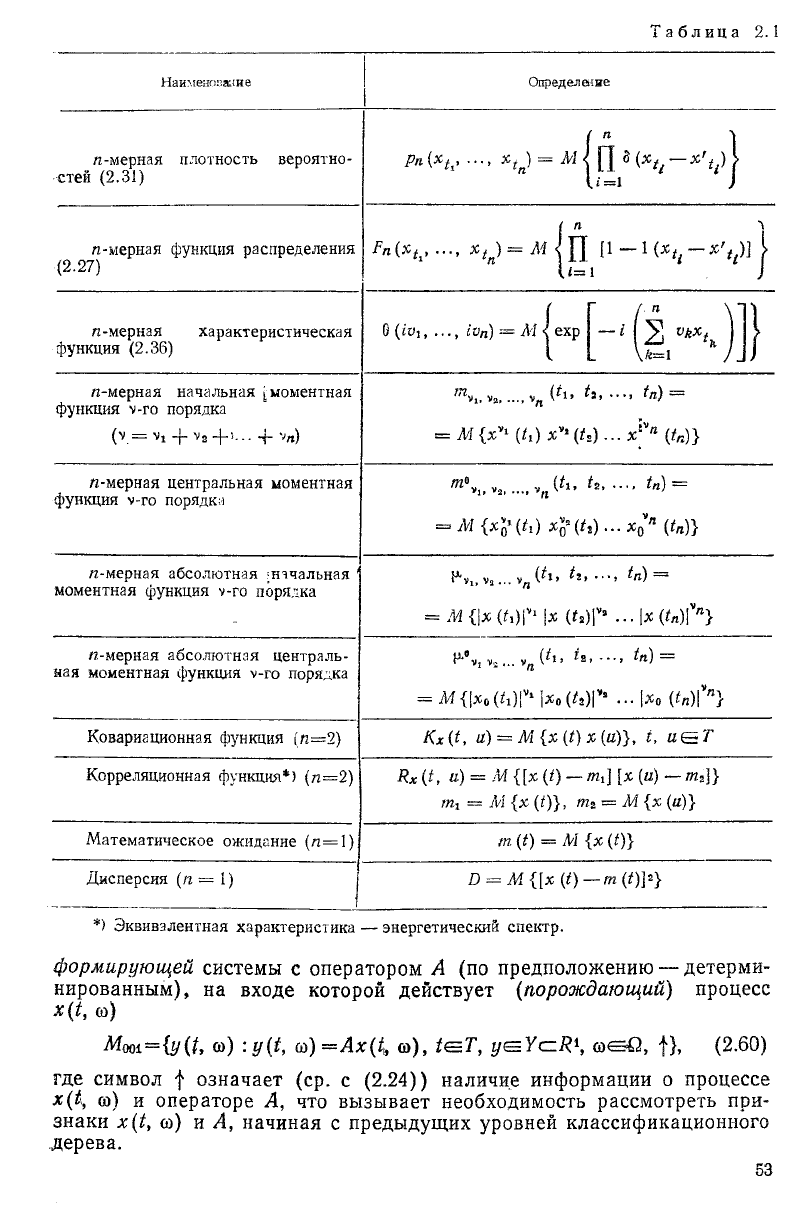
Таблица 2.1
Наименование
Определение
га-мерная плотность вероятно-
стей (2.31)
Рп
.... ^
)
= м|пЗ(х
//
-х^)|
га-мерная функция распределения
(2.27)
Рп (х^
( п
*<
Я
)
=
И4
|П I
1
-
1
|
га-мерная характеристическая
функция (2.36)
6 (го,, ..., го„) = М |ехр
-— г
^ |
га-мерная начальная [моментная
функция *>|-го порядка
(V = V, -{-
Уц
+'.... 4-
('»> *п) =
га-мерная центральная моментная
функция V-го порядки
»„('».
**
'«) =
я-мерная абсолютная 'начальная '
моментная функция V-го порядка
14, V»... »„('»> **> •••' =
= \Х (^)Г
1
1* (<.)Г...|* С»)Г
Я
}
п-мерная абсолютная централь-
ная моментная функция \|-го порядка
= М{|ХВ(^)Г
1
1*» (МГ' •••1*0 ((п)Г"}
Ковариационная функция {п=2)
КхУ, и) = М{х(()х(и)}, 1, и<=Г
Корреляционная функция*) (л=2)
Я
х
((, а) = М {{х (0 — /и,] [х (и) — т
г
]}
1Щ
— М {х (0), Ш = М {Х (А)}
Математическое ожидание (га=1)
т (() = М {х (()}
Дисперсия (га = 1) |
В = М{[х (()—т(()]*}
*) Эквивалентная характеристика — энергетический спектр.
формирующей системы с оператором А (по предположению —детерми-
нированным), на входе которой действует (порождающий) процесс
х(1,
<в)
М
т
={уЦ, ю) :у({, а) <в), «вей, Ц (2.60)
где символ | означает (ср. с (2.24)) наличие информации о процессе
х(Ь,, ю) и операторе А, что вызывает необходимость рассмотреть при-
знаки х(1, со) и А, начиная с предыдущих уровней классификационного
дерева.
53
Выражение (2.60) можно записать иначе
Моо1={у(Л со) :у{К со) =Ах{1, со), ШТ,
г/еУс/?', т
х
е=М
0
,
(2.61 >
где т
х
и т
А
соответственно модели процесса х{1, со) и системы с опе-
ратором А. Символически
ТИоо1 = сотЬ (М
0
, МО, (2.62)
где сошЬ — оператор комбинирования моделей порождающего процесса:
и формирующей системы.
Если х(^) ='[х1 (/), ..., х
г
(/,)], то имеем систему с г входами и опера-
тор Л можно назвать оператором взаимодействия процессов со,)
(г'=1, г); если порождающий процесс — скалярный (г = 1), то имеем си-
стему с одним входом и А —оператор прохождения.
Поскольку в (2.62) число разрядов кода адреса у моделей УИ
0
и Мц
меньше, чем у модели М
т
, классификация рассматриваемых моделей
имеет «возвратный» характер. Например, если Хг{1)—независимые
процессы (модель М
0
— сепарабельна), то
М
0
„ = сотЬ [М
00
..., М
00
М„], (2.63)
и необходимо не менее, чем г+1 раз возвращаться ко второму уровню
иерархии классификационного дерева с целью определения классов мо-
делей, входящих в правую часть (2.63). Если в ходе классификации
будет вновь получена структурная модель, необходимо повторять этот
цикл до тех пор, пока для всех структурных моделей не будут получе-
ны формальные модели на последнем р,-ом уровне иерархии.
Примеры моделей данного класса чрезвычайно многочисленны. Так, если гауссов-
скнй процесс х((, со) с энергетическим спектром 1У(м') проходит (>"=1) через линей-
ную систему с комплексным коэффициентом передачи Кл
(/СО'),
то (2.63) в спектраль-
ной форме запишется
Г^м') = Г,(со')\Кл (/со') |
2
. (2.64)
Структурное представление процесса в виде порождающего процесса, имеющего вид.
белого шума, прошедшего через систему, оператор которой задан дифференциальным,
уравнением, лежит в основе современных методов обработки сигналов |(метод калма-
новской фильтрации {37]). Примерами устройств, реализующих операторы взаимодей-
ствия, являются сумматоры, перемн-ожители, модуляторы (соответствующие процессы
;/(/, со) в этих случаях называются аддитивными, мультипликативными, модулирован-
ными), многие виды измерительных систем: взаимокорреляторы, анализаторы взаимно-
го спектра, фазометры, измерители коэффициента искажений сигнала и т. п.
Дальнейшую классификацию данных моделей мы проводить не-
будем, ввиду чрезмерно большого числа возможных вариантов. Отме-
тим лишь, что существенный интерес представляют задачи определения
признаков полноты (неполноты) и стационарности( нестационарности)
процесса у(1, со) в зависимости от аналогичных признаков порождаю-
щего процесса и формирующей системы. В соответствии с этим можно
судить о принадлежности модели рассматриваемого процесса у{1, со)
к классам: полных и неполных структурных скалярных моделей про-
цессов (0010 и ООП), а также стационарных и нестационарных полных-
и неполных структурных скалярных моделей процессов (00100, 00101,
00110 и 00111). Сведениями о постановке или решении подобных задач:
мы не располагаем.
54
(01) Векторные модели процессов, предназначенные для описания
процессов, область значений которых есть векторное пространство Я
п
(векторных процессов), можно представить выражением (ср. с (2.23))
Л*01={х(/, х^ХаЯ
п
, соей}. (2.65)
Таким образом, х(() = (Х1^), ..., х
п
(1)), причем компоненты Хг(1)
•(1=1, п) могут быть связаны (например, в вероятностном смысле)
между собой.
Скалярные модели М
00
(2.23) могут рассматриваться как частный
случай
М01,
получающийся при п=1.
(010) Формальные векторные модели процессов определяются, ана-
логично (2.24), выражением
М
0
ю={х(*, со) :ШТ, хеХс^, соей, (2.66)
и, таким образом, строятся в предположении отсутствия информации
о механизме формирования как процесса в целом, так и отдельных его
компонент.
(0100) Полные формальные векторные модели процессов характери-
зуются определением (ср. с (2.25))
АГоюо={х, ((, со)
:
/еГ, соей, Р}, (2.67)
где Р — вероятностная мера, связанная с пространством Й элементар-
ных событий ю, состоящих в «выпадении» конкретной реализации
х (/, и) =
(XI
{I, 0)1), ..Хп (2, <в„)) (2.68)
векторного процесса.
Согласно (2.68), точками пространства О являются
В=(Й)
1
, .., ш„)ей, (2.69)
где /= 1, п. Если на 2; заданы вероятностные меры Я/ (<А1) событий
€Е то на 2 вероятностная мера Р (.А) события
Л = {(со„ ... , <о
л
): (Чб^г, 1=1, П} (2.70)
определяется выражением
п
Р{Л)=]\Р1Ш>. (2-71)
1 = 1
отражающим свойства независимости событий Ль-
Если каждая из компонент со,) есть процесс ?г-го порядка
п
(2.37), то векторный процесс вполне определяется^ «г-мерной плотно-
1=1
стью вероятностей щ различных значений каждой из компонент и вме-
сто (2.67) можно записать
со п со
Ь у'бМ $Рп (х
1
.*
1
.-
—00 /=1 —ОО X
1
п:
/=1
..., х» 1") ах» ... йх^йхЖ ... йх" = Р
п
(х\ 4*)}, (2.72)
Где
Рп. (
х
*> —плотность вероятности г'-й компоненты. Это выражение
п
можно трактовать как определение векторного процесса ^П{-го поряд-
1= 1
55
ка, а также как условие согласованности (ср. с (2.35)) плотности веро-
ятности векторного процесса с плотностями вероятности его компонент.
(0101) Неполные формальные векторные модели процессов по
аналогии с (2.55) можно определить выражением
м
0101
= {х({, шх^хая
п
,
I
_ 1 •
а
^-(Р),
(*
= !,/-) 3/7'}. (2.73)
В частности, для векторного процесса 2 т-го порядка (2./2) неполные модели
удовлетворяют условию
М
0
,<п = <о): (бГ, хеЛ'еЯ", Иб2, ь
00 п оо ,
1 (Х
лз
) \
р
п 11
х
^
ах
'~
1йх1+1
•••
йхп
'ФР
П1
(
х
'> '
—00 1=1 —00 V
1
П1 I
й
(2.74)
причем в классе подобных моделей легко выделить модели, полные относительно
составляющих (/-полные модели). Тогда левому равенству будут соответство-
вать абсолютно неполные модели, а правому-—абсолютно полные модели (2.72). При
экспериментальном исследовании подобных процессов имеет смысл рассматривать лишь
те компоненты, которые статистически связаны между собой. Назовем компоненту
Х](() независимой (несвязанной) по отношению к остальным п—1 компонентам (свя-
занным), а модель сепарабельной, если
з/е{Т7И), р
п
(х>, ... ,х«, ^) = р
п
(х/, И)р „ (х«, у,...
1=1 1 = 1
1Ф1
...х/-", Ц-\ х/+», 1/+
1
х", *"). (2.75)
В этом случае следует отдельно рассматривать скалярную модель процесса и
векторную модель п—1-компонентного процесса. Аналогичным образом рассматривают-
ся модели, сепарабельные относительно произвольных групп компонент. В вырожден-
ном случае полной сепарабельности, когда
п
У*Е{Т7~П), р
п
(XI, X», 1") = I]
РП
. (X'. !'•). (2-76)
V п, 1 = 1
1 = 1
рассмотрение векторной модели теряет смысл (ср. с (2.23)). Отсюда, по аналогии
о определениями «-полных и /-полных моделей, легко ввести понятие полноты модели
по отношению к числу п статистически связанных компонент вектора х(() (п-полные
модели).
Примерами неполных моделей служат также модели, задаваемые взаимными ко-
вариационными функциями
Кх,у(*, и)=М{х(1)у(и)}, иеГ, (2.77)
взаимными корреляционными функциями
а)=М{[х(1)-М{хШ1у{и)-М{у{и)}}}, I, и*=Т (2.78)
или взаимными энергетическими спектрами
Р
х
,
у
(<•>')=
| Ях, у (т) е х = I - и е Т, (2.79)
если только подобные характеристики не определяют вероятностную меру единствен-
ным образом.
(01000) Стационарные полные формальные векторные модели про-
цессов задают стационарно-связанные в узком смысле процессы, у ко-
торых (ср. с (2.52)) все конечномерные совместные плотности вероят-
ностей любого порядка инвариантны по отношению к сдвигу моментов
времени на любую величину
М
о1ооо
= {х(г,
(в)
= (х, [I, <о,),..., х
п
{г,
<»„)):
(/</>+тег, ]=йп), Рп [х<»>, 4(0,..., х<«>, *<«>]=*
1 = 1
= р„ [Х(Ч, «(»-{-* х<">, 1<
я
> + х]}.
1=1
(01001) Нестационарные полные формальные векторные модели
процессов определяют нестационарно-связанные процессы
М
оио1
= {х(1, ш) = (л'!(/, ш,), ..., ХпЦ, а>п)):
Г67
7
, хе^с-^, I, за, з*
(/)
>
Р+^ЕГ, /=й), Рп (х
(1)
, К
1
»,..., х<»>,4<»>)#
н
1 = 1
-р
п
(хм, 4-х,..., х("), 4-х)}.
2 «I
1 = 1
(2.81)
Объединяя (2.80) и (2.81) имеем для произвольного ц-стационарно-связанные
процессы (или, что то же (<7+1) -нестационарно-связанные)
х (0:
' ухе 7", р (XI,
1=1
р
ч+1
(х\ {•,
V
ч
1=1
хч,1ч) = р„ (XI, Ь + х , ... ,Х1, Й + т)
1=1
Х7+1, 47+1)^= р
ч+1
(х>, 4(0+1, ...
V п,
^
1
( = 1
... , х<7+1, + т).
(2.82)
При д
—
п имеем стационарно-связанные в узком смысле процессы (2.80), при
4=0 — абсолютно нестационарно-связанные, при <7=2— стационарно-связанные в ши-
роком смысле. В последнем случае взаимно-корреляционная функция процессов зависит
только от одного аргумента.
Используя (2.73), по аналогии с (2.58) и (2.59), легко определить
также соответственно стационарные неполные формальные векторные
модели процессов (01010) и нестационарные неполные формальные век-
торные модели процессов (01011).
(011) Структурные векторные модели процессов можно опреде-
лить, интерпретируя некоторую группу г<п процессов, описываемых
.взаимной моделью, как входные (порождающие), а остальную группу
57

п—г процессов — как выходные некоторой системы с г входами и п—г
выходами (ср. с (2.60))
Мом =
{у(*,
со) :у(*, со)=Лх(/„ со), ШТ, уеУс=7?«- соей, (2.83)
Необходимые в этом случае определения и соотношения можно йо-
лучить на основе рассуждений, аналогичных приведенным при рассмот-
рении класса (001), к которому сводится, в частности, данный класс
в случае «полной» сепарабельности
{у{1, со)=&•(*, со,), /=Л7~г}, (2.84)
т. е. в случае многоканальной системы с / независимыми каналами.
Заметим, что модели данного класса широко используются при установлении фак-
та и вида связи между процессами, в задачах идентификации, при измерении таких
характеристик, как время запаздывания (опережения) одного процесса относительно"
другого, коэффициент усиления (ослабления), количество информации, содержащейся
в одном процессе о другом, например, искаженном шумом, а также при исследовании
важного класса характеристик, описывающих точность систем или устанавливающих
любые меры «сходства» и «различия» процессов.
Что касается полных (0110) и неполных (0111) структурных век-
торных моделей процессов, а также стационарных (полных 0110) и
неполных (01111) структурных векторных моделей процессов, то их
определения вводятся по аналогии с соответствующими классами ска-
лярных моделей.
2.3. МОДЕЛИ СИСТЕМ
(1) Модели систем определяются выражением
М^{{х{1), у(Щ :*(/), у{Ц^М
й
), (2.85)
и, таким образом, система представляет собой упорядоченную пару
процессов, возможно, векторных, причем, как указывалось, первая ком-
понента этой пары {*(/), /е^} называется входным процессом, а вто-
рая {у(1),
Ту}
— выходным (так называемая «пара вход-выход»).
Дальнейшие предположения относительно свойств входного и выходного процес-
сов позволяют выделить всевозможные подклассы систем. ,В частности, взяв признаки
процессов, рассмотренные в предыдущем параграфе, можно было бы (в рамках этой
совокупности признаков) получить необходимую классификацию. Своеобразие систем
по сравнению с векторными процессами (класс М<н), которое отражается в упорядо-
ченности компонент пары, кроется в том, что х(1) и у
(Г)
объединены определенными,
в общем случае вероятностными, причинно-следственными связями, причем х(Ь) играет
роль причины, а уЦ)—следствия. Иногда используют также термины «динамическая
система», желая подчеркнуть то обстоятельство, что следствие не может предшество-
вать вызвавшей его причине, т. е. система преобразует лишь прошлые и текущие (на
не будущие) значения входного процесса.
Реализация «двухкомпонентного» процесса (х(1), г/(/)) также
является двухкомпонентной: первая компонента представляет собой
реализацию х(1) входного процесса, а вторая — порожденную ею реа-
лизацию у {I) выходного процесса. На множестве таких двухкомпонент-
ных реализаций может быть задана вероятностная мера, например,
в виде последовательности га + /п-мерных совместных плотностей вероят-
58
ностей, которые, собственно, и описывают причинно-следственные свя-
зи между входным и выходным процессами, поскольку
р(х, у)=р(х)р(у\х), (2.86)
где р(х) Д р
п
(х
1г
..., Хп) — «-мерная плотность вероятности входного про-
цесса, а
р(у| х) Ар
т
{у
и
..., г/т |.Х„..., (2.87)
— условная т-мерная ПЛОТНОСТЬ вероятности выходного процесса при
фиксированной входной реализации.
Таким образом, система в общем случае характеризуется неодно-
значным соответствием входа и выхода, в том смысле, что одной и той
же реализации х(1) на входе соответствует (при повторных экспери-
ментах) множество реализаций у на выходе.
В частном случае это соответствие может быть однозначным, т. е,
все реализации у (1), соответствующие данной реализации х{1), будут
совпадать. Используя (2.87), удобно подразделять системы по этому
признаку на стохастические (вероятностные, рандолизированные, не-
регулярные, неопределенные) и детерминированные (регулярные, пол-
ностью определенные).
Стохастические системы определяются выражением (ср. с (2.42))
{(х(0, г/(Г;):
Э
/*е7\ р(у\х)фЬ(у-~Ах)}, (2.88)
где символ б(-) означает, что при фиксированном х(й) с вероятностью
единица наблюдается у(ц или, что то же, условная мера, заданная
в пространстве выходных сигналов, сосредоточена на реализации
(в точке) у (Ц («континуальная» 6-функция); А — некоторый оператор.
Таким образом, систему можно описать с помощью условной плотно-
сти вероятностей р(у|х).
Детерминированные системы можно определить соотношением (ср.
с (2.40))
{(х (0, у (0)
=
V' е Т, р (у
!
х) =
8
(у - Ах)} (2.89)
и, таким образом, для описания системы достаточно задать ее оператор
А в виде, например, алгебраического, дифференциального, интеграль-
ного или интегродифференциального уравнения или системы таких
уравнений. При этом, поскольку оператор описывает соответствие
(однозначное или взаимно-однозначное) между функциями х(?) и у(1),
множество входных реализаций есть область определения, а множество
выходных реализаций — область значений оператора А.
Различие методов описания детерминированных и стохастических систем обуслов-
лено следующими обстоятельствами. При описании детерминированных систем пред-
полагают, что все процессы, действующие на систему, доступны непосредственному
наблюдению (контролю), причем все эти процессы включаются в процесс х(() как его
компоненты. При описании стохастических систем считается, что, помимо х(1)—кон-
тролируемого (наблюдаемого, полезного, управляющего) входного процесса, имеются
•неконтролируемые (мешающие, паразитные, возмущающие) входные процессы
действующие на систему, в результате чего она представляется в виде «стохастического
оператора», такого что
у({, м)=Л(2(г, и
г
)]х(^, <в*)=Л(о)
г
)х(г, Ых), (2.90)
•где <а=((о
г
, ш«)ей, (1)
г
еЙ
г
, бьей*.
59