Qin Y. Micromanufacturing Engineering and Technology
Подождите немного. Документ загружается.

coatings. Gels with different levels of adhesive
strength are available depending on the sizes
of the components.
3. Belt magazines: a belt magazine has a band
made with depressions into whi ch the compo-
nent is locked by a covering layer of foil. For
small pieces, plated and embossed belts are
available to enclose the components.
4. Tube magazines: in the case of tube maga-
zines, the components are either stacked or
lined up. The lengths of the tubes, which are
made of plastic, are shaped like the compo-
nents themselves, thus preventing the compo-
nents from becoming distorted.
In general, a dimensionally specific carrier is well
suited for large volume production where changes
of micro-component types are not frequent.
Conventional Transport Equipment
Conventional transport equipment such as stock-
ers, vehicles, conveyors, manipulators, indexers
and lifters are used for transporting materials,
components and tools between the different sta-
tions in a linear pick-and-place plant based on
carriers.
Conveyors usually consist of a looped belt
or chain moving along a predetermined path.
Instead of conveyors, vehicles could be more flex-
ible and easier to adapt to changes in the environ-
ment. Both conveyors and vehicles are used to
transport the carriers and cassettes between the
different stations. Some examples of transport
equipment are: a person-guided vehicle (PGV); an
overhead-hoist transport (OHT); a rail-guided
vehicle (RGV); and an autonomous-guided vehicle
(AGV).
1. An OHT is a conveyor suspended from the
ceiling that loads/unloads carriers or cassettes.
2. An AGV is a trackless mobile robot typically
with a single gripper, a single manipulator and
two buffers. A buffer refers to a place on the
vehicle where one or two carriers can be
placed. Loading/unloading of carriers and
transfer between two carriers can be per-
formed.
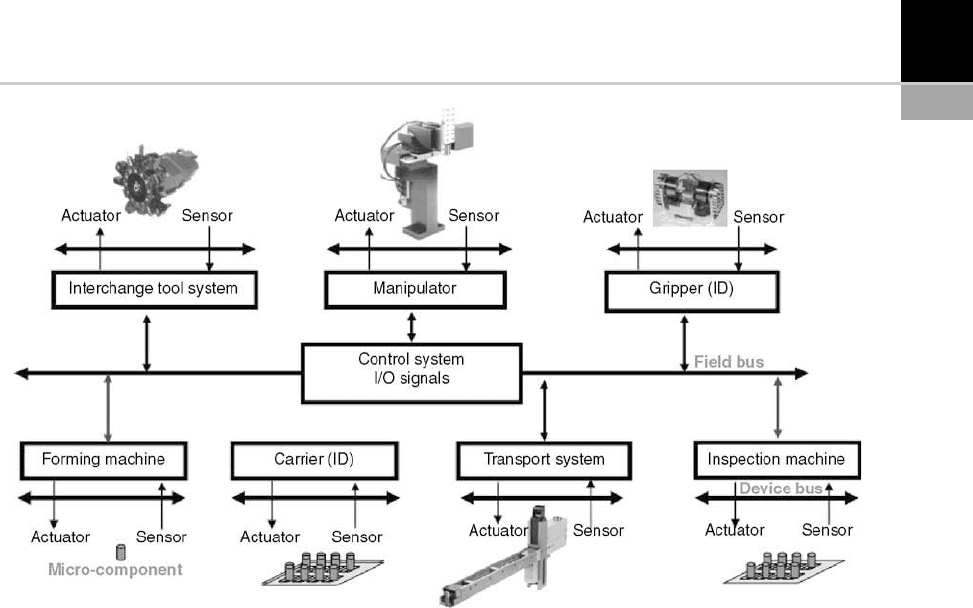
FIGURE 18-2 Linear pick-and-place concept based on carriers.
CHAPTER 18 Handling for Micro-Manufacturing 301
3. An RGV is a rail-guided mobile robot of
which there are several types with various
numbers of grippers, manipulators and buf-
fers.
4. Finally, a PGV is a person-guided vehicle.
There are several types of vehicle, as with the
RGV.
Other components such as optical character
recognition (OCR), ionization units, carrier ID
or light curtains are occasionally added, based
on system requirements.
INTRA-MACHINE
MICRO-HANDLING SYSTEMS
A key problem area limiting the emergence of
automated micro-handling technology is the
non-availability of flexible and highly precise
micro-handling machinery [2].
The most significant difference between
meso- and micro-handling is the required posi-
tional accuracy of automatic handling systems.
Micro-handling often re quires sub-micron pre-
cision. This degree of precision is beyond the
calibration range of the normal open-loop
precision-handling devices used in industry.
Closed-loop strategies, such as real-time vision
feedback, are required to compensate for poor
kinematic models and thermal effects. Addition-
ally, in micro-handling the structural vibration
due to link flexibility must be controlled at a
sub-micron level.
Another major difference between handling in
the meso- and micro-domains is the mechanics of
object interactions. People usually think in meso-
scale terms, but when talking about handling
methods at the micro-scale, gravity and inertial
forces cannot be considered the main forces being
applied to the part. In the micro-world, surface
forces dominate due to scaling effects, and the
mechanics of manipulation can be unpredictable.
For example, when a gripper opens, the part may
not drop downwards.
Finally, it is necessary to emphasize that micro-
handling requires greater care in manipulation
and in cleanliness because the micro-parts are very
fragile. Usually it is mandatory to control the
grasping force s and to work under clean-room
conditions.
Since micro-scale positioning becomes a diffi-
cult problem, manual micro-handling is the
most commonly used method. In this case micro-
handling tasks are carried out by operators, who
position and align objects manually in a specific
station. The application of tele-operating micro-
handling, which transforms the human operator’s
hand motion by means of a joystick into the finer
3D motion of the system’s manipulator systems,
is normally tailored to specific complex tasks.
Finally, an automated serial pick-and-place task
is only applied to micro-parts which can be
handled and released using a well-suited gripper.
A micro-handling system is composed of the
following sub-systems:
1. Micro-part feeder sub-systems;
2. Fixture and gripper sub-systems;
3. Sensor a nd control sub-systems.
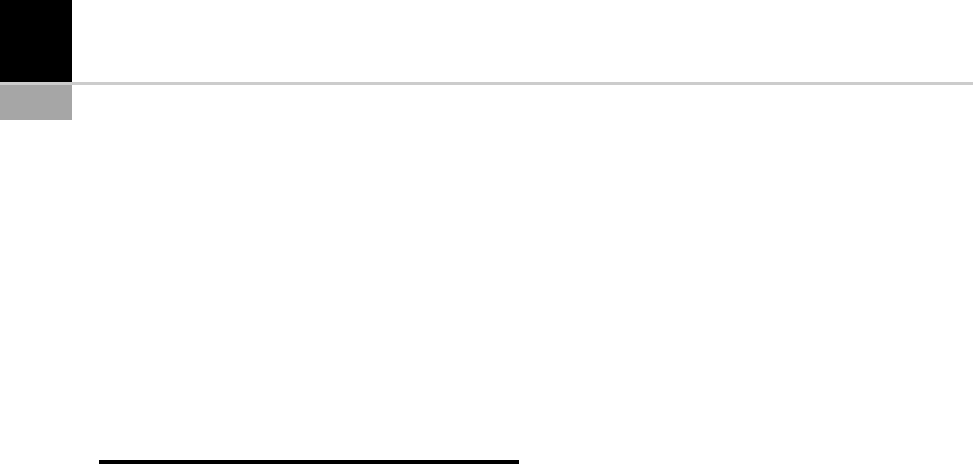
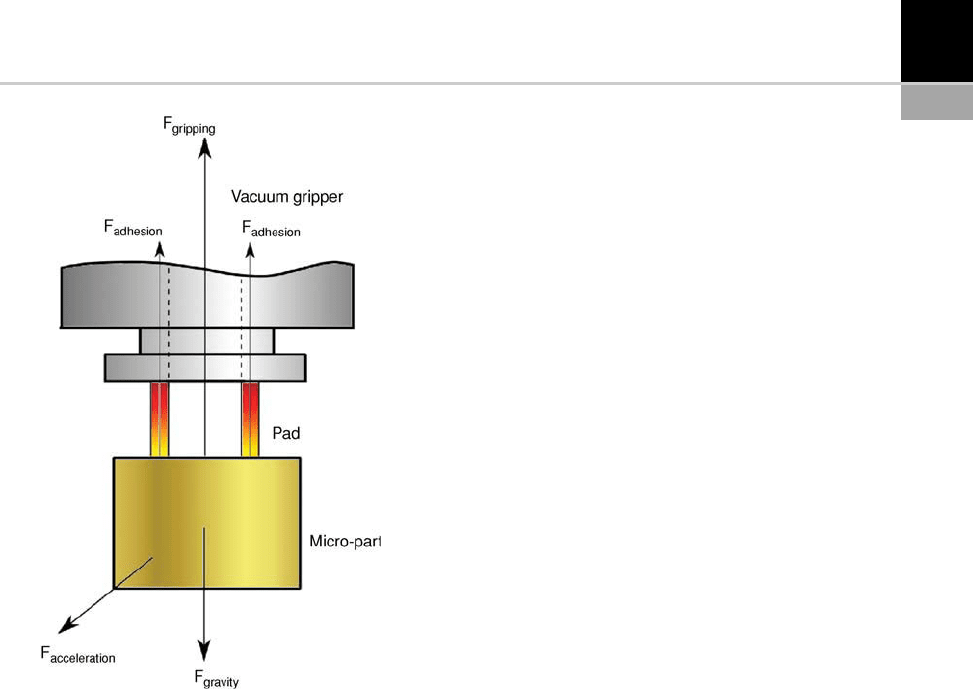
Significant Forces at the Micro-scale
In micro-handling, surface forces such as friction
or adhesion are immensely more significant than
in meso-handling. Therefore at the micro-scale
(masses <10
6
kg), gravity forces are not signif-
icant compared to surface forces, and releasing
an object becomes a real challenge due to adhe-
sion between the micro-part and the tool (see
Fig. 18-3).
Formally, a force is defined to be short-range if
it decreases with distance quicker than d
n
where
n is the dimensionality of the system (usually 3).
Short-range interactions are commonly dealt with
by imposing a cut-off to the potential V(d), d
c
,
beyond which V(d) is set to zero. On the other
hand, long-range forces have a range of infinity.
Inter-molecular and surface-force inte ractions
are classified into several categories. The first cat-
egory includes long-range attractive interactions
that bring particles to surfaces and establish adhe-
sive contact. These forces include van der Waals,
electrostatic, and magnetic forces. The second
category of forces is focused on adhesion, includ-
ing diffusion, condensation, diffusive mixing,
mutual dissolution, liquid and solid bridges
302 CHAPTER 18 Handling for Micro-Manufacturing
between particles and surfaces, and capillary
forces. The third category includ es very short-
range interactions, which can contribute to adhe-
sion only after an adhesive contact area has been
established. These forces include chemical bonds,
intermediate bonds and hydrogen bonds.
Balancing these forces depends on environ-
ment conditions, such as humidity and tempera-
ture, the surface condition, material properties,
geometry, and relative motion. Micro-handling
is quite different from meso-object manipulation.
To manipulate micro-objects, one must consider
micro-physics and pay attention to environmental
conditions.
There are three main adhesive forces that are
important for handling micro-parts: van der
Waals, capillary and electrostatic forces [3]. Van
der Waals forces come from inter-molecular
potentials and are always present. Capillary- or
surface-tension forces depend on the humidity of
the environment and electrostatic forces are due
to the tribo-electrical phenomenon. Much work
has been done by several authors, who have pre-
sented the principles of van der Waals forces, sur-
face-tension forces and electrostatic forces [4–5].
Some authors have described numerical methods
to compute the van der Waals force between a
smooth sphere and a smooth rectangular block
[6] or to compare capillary effects with surface-
tension forces [7]. However, micro-parts have
different shapes with considerable surface rough-
ness and often show large deformation in the con-
tact region. As a consequence, theoretical predic-
tions are rarely applicable in practice.
In order to improve micro-part manipulation,
different strategies have been set up to deal with
these surface forces [6,8]. First, the effects of sur-
face forces, F
adhesion
, can be reduced by choosing
an adapted set of manipulation parameters. This
can, for example, be done by changing the coat-
ing. Surface-tension effect s can be reduced with
hydrophobic coatings, electrostatic forces by
using conductive materials, and van der Waals
forces by increasing the roughness profile.
Micro-part Feeders
A micro-part feeder always uses a certain number
of functions to ensure the perfect treatment of a
micro-part at the workstation. These functions
are to: index; extract (isolate, disentangl e, sepa-
rate); sort; turn over; locat e; guide; move; load/
unload; release/seize; and recognize a micro-com-
ponent. Micro-part feeders, which singularize and
orientate parts prior to the station processes, are a
significant bottleneck in successful autom ation.
The basic kinds of part-feeding, which are
designed to feed and to orient the micro-parts,
may be classified as follows:
1. Mechanical feeders;
2. Manipulator-based part-feeders.
Mechanical Feeders. Commonly used mec han-
ical feeders for micro-handling are vibratory-
bowl feeders and tape-and-reel systems .
The most common approach to automated
feeding is the vibratory-bowl feeder, which con-
sists of a bowl filled with parts guided by a
mechanical track. The bowl and track are made
to vibrate, causing parts to move on the track,
where they encounter a sequence of mechanical
devices such as grooves, gaps, balconies, etc. Most
of these devices are filters that reject parts in all
orientations except for the desired one. Thus a
stream of oriented parts emerges at the end after
successfully running the full track.
Another particular form of mechanical feeder
is known as tape-and-reel for feeding parts of
FIGURE 18-3 Significant forces depending on part size.
CHAPTER 18 Handling for Micro-Manufacturing 303

relatively small sizes, which can be placed on
tapes of standard width. Tape-and-reel is a
method of housing parts in separate cavities in a
long continuous strip. The cavities are covered
with a plastic sheet to facilitate winding the strip
around a reel for component presentation or feed-
ing to automated placement equipment. These
particular mechanical feeders are based on stan-
dard belt or tube magazines.
For large-volume manufacturing, the employ-
ment of a dedicated mechanical part-feeding
apparatus may be justified. However, mechanical
feeders often fail due to jamming, and, most sig-
nificantly, generally require retooling when a
micro-component is changed.
Manipulator-based Part-feeders. Another com-
mon feeding c oncept is the use of a specially de-
signed carrier for each micro-part family to
maintain suffi cient accuracy for a completely
preprogrammed manipulator. In this case, the
manipulator w ill perform a serial pick-and-
place task using a specific g ripper mounted on
the manipulator.
Conventional manipulators do not meet the
repeatability and accuracy requi rements needed
in the micro-world because joint backlash, tem-
perature drift and structural vibration must be
controlled at the sub-micron level.
The state-of -the-art of precision industrial
manipulators is summarized in Table 18-2. This
table shows the most important parameters of the
workspace, the accuracy, the velocity and the load
capacity of different manipulators. The most
common configurations are SCARA (RRP) and
Cartesian (PPP) manipulators, but other config-
urations are also available. There are important
differences in degrees-of-freedom (DOF), accu-
racy, workspace and load. The most accurate
manipulators have reduced speeds. Cartesian
manipulators are usually slower than SCARA-
type robots, but have greater precision.
Micro-handling flexibility would denote that
different products with similar scales and com-
plexity levels are handled at the same station with-
out any hardware modifications, but with soft-
ware changes. Although there are technological
and economic limitations to reach in such a goal,
shorter product life and constant product changes
demand greater flexibility in the han dling process.
The most common princ iple for achieving flexi-
bility is vision-based flexible part-feeding, which
is a concept used in conjunction with a manipu-
lator, whereby the manipulator uses a vision sys-
tem to locate micro-parts that can be randomly
scattered on a conveyor belt. Randomly oriented
parts have to be positively identified and accu-
rately located everywhere within the camera’s
field of view.
The cost and performance of a micro-han dling
system can be significantly improved by carefully
considering issues at multiple scales: precision,
compliance, modeling, gripping, fixturing, toler-
ance, and control. One of the basic challenges in
precision handling is the need for very high accu-
racy ov er a large range of motion. This fact
involves the design of handling tools and pro-
cesses at multiple scales, and their integrat ion
into coherent system architectures. One possible
approach to micro-handling systems is to improve
the performance of standard manipulator sys-
tems. A conventional robot for coarse motion
with low accuracy but long traveling distance is
used and there is a fine-positioning device be-
tween the end effector and the robot with high
accuracy and a very small traveling distance.
Existing solutions have the common feature of
being expensive and bulky. Due to their dimen-
sions, they are sensitive to environmental pertur-
bations such as vibrations or temperature drifts. A
general trend is to reduce manipulator size. The
aim is to improve the system’s immunity to envi-
ronmental perturbations such as vibrations and
thermal drifts. The devel opment of such robots
is now be ing made possible by new technologies,
in particular by zero-backlash micro-gears and
highly dynamic micro-motors with integrated
incremental encoders, which allow manipulator
structures to be miniaturized.
Fixtures and Grippers
Fixtures are used to hold micro-components dur-
ing machining, inspection and assembly pro-
cesses. The use of precision fixtures can mitigate
304 CHAPTER 18 Handling for Micro-Manufacturing
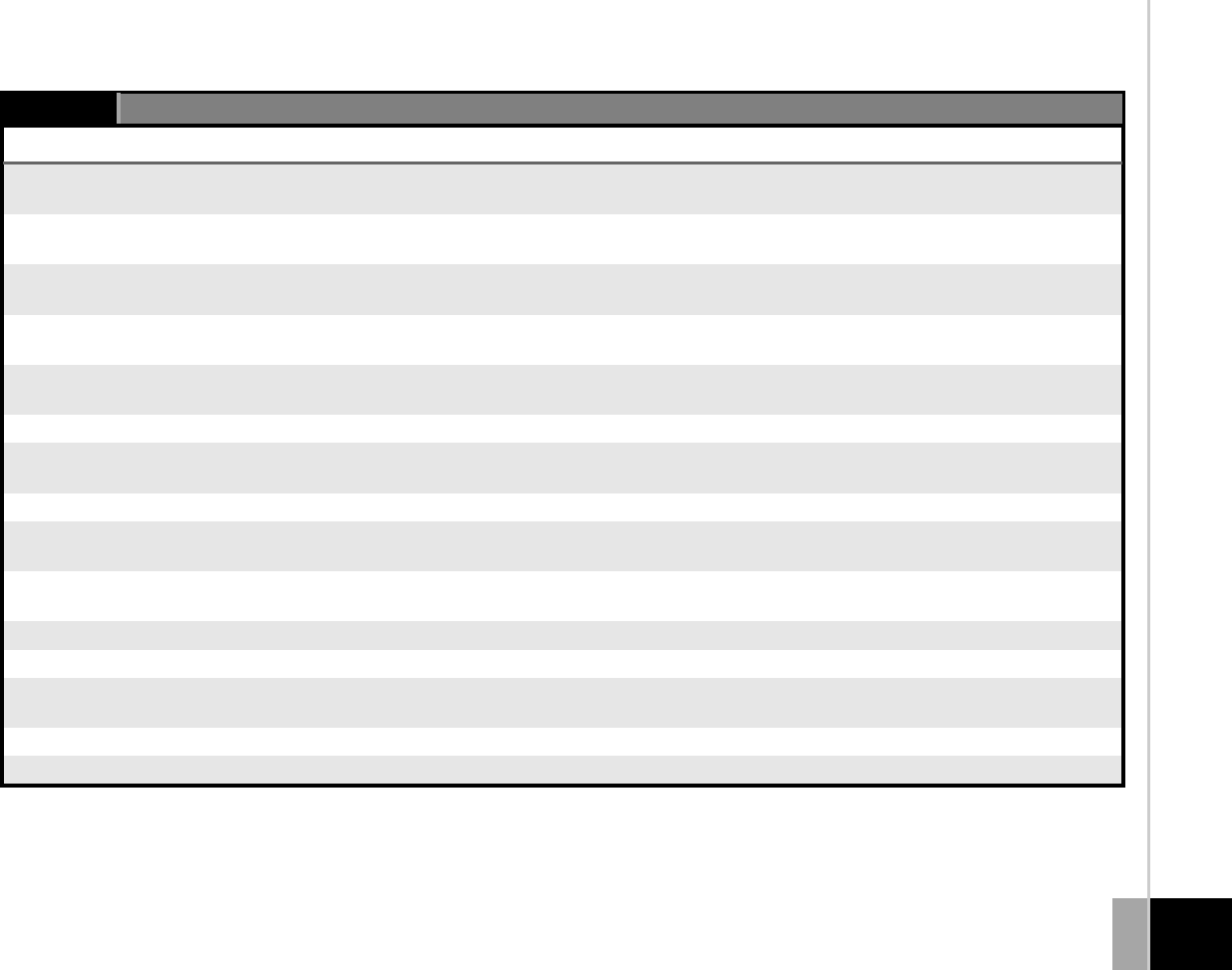
TABLE 18-2
Some State-of-the-Art Industrial Micro-manipulators
Model By Type DOFS Rep. Acc. (um) WS (mm) Load (kg) Speed (mm/s)
E2C Epson Scara 4 8 R250 Z100 5 P&P
0.39 s
RP-1AH Mitsubishi Scara 4 5 150 105 25 1 400
P&P 0.28 s
YK-120X
YK-150X
Yamaha Scara 4 5–10 R110 Z30 0.5 700–2000
P&P < 300
Tusboscara
SR4-Plus
Bosch Scara 4 50 R400 Z200 2 1600
Autoplace400 Sysmelec Cart 4 2.5 150 150 150
85 85 75
4
MP63-25DC Feinmess Cart 3 5 25 25 25 2 5
MP84 Feinmess Cart 3 3 25 25 25
100 100 100
1.5 250
1940 Kopf Cart 3 1 128 128 128
MM3A Kleindiek RRR
(antr)
3 1 100 cm
3
z:12 x,y:180
10
Klocke Nanomanip RRP
(spher)
3 0.001 5 5 19 5
MRSI
Exfo PCS-4100 RPPPR 5 0.4 25 25 25 2
Semprex Univ. pipette
manipulator
PPPRPP 6 75 33 25
95
75,200
Somapatch MW3R/L CART 3 0.25 5 5 5
MRSI Newport PPPR 4 10 415 415 9000
CHAPTER 18 Handling for Micro-Manufacturing 305

the need for high positional accuracy. V-groove
structures, datum points or other minimum
energy surfaces should be used as much as possi-
ble to guide the micro-parts into their desired
positions and orientations.
Micro-grippers are used to grasp, hold and
release micro-components during the handling
process. Compliance analysis of micro-handling,
including both the gripper and the micro-part, is
critical for reducing the necessary positional accu-
racy of the system, and therefore the cost. The
handling system need not require the same preci-
sion as the tolerance of the locations if proper use
is made of co mpliance, gripping and fixturing.
Grasping Principles. A grasping principle is the
physical principle which produces the necessary
force to get and maintain a part in a position with
respect to the gripper. Some grasping princ iples
are well known in the meso-domain: friction-
based gripping [9]; form-closed gripping [10];
suction-based gripping [11–12]); and magnetic
gripping.
Other principles, based on adhesive forces, are
particularly applicable in the micro-domain [13].
One example is the use of electrostatics, or the
charge difference between the gripper and the part
[14–16]. For small, low weight parts, the capillary
force and the surface tension of a liquid between
the gripper and the part can be sufficient to hold
the part [17–18]. Van der Waals force is ano-
ther grasping principle [19]. Cryogenic gripping
means that a small amount of liquid is frozen
between the gripper and the part, so that the adhe-
sive property of ice produces the required force.
To release the part, the frozen material is broken,
and/or molten and evaporated [20]. Ultrasonic
pressure waves can also be used to lift a pa rt. Since
these forces are small, only extremely light parts
can be handled in this way [21]. A focused light
source, for example a laser source, can produce a
pressure which is sufficient to lift small parts. To
compensate for the mass of the part, the operation
may take place in a liquid [22,23]. The Bernoulli
effect has also been demonstrated to be applicable
for raising small parts; an airflow between gripper
and part causing a force which brings the gripper
and the part close together.
Grasping Requirements. Some grasping princi-
ples can only be applied when the environment in
which the operation takes place meets certain
demands, or, the other way around, the environ-
ment puts constraints on the selection of the
grasping principle. In some cases conditioned
environments are applied. Micro-handling may
for instance take place in clean environments, in
dry environments, or in a vacuum. The substrate
is important because adhesive forces occur
between both the part and the gripper and also
between the part and the substrate. One possible
attractive alt ernative is to manipulate parts while
they are immersed in a fluid, which eliminates
electrostatic and surface-tension effects. Fluidic
transport provides a powerful means for handling
components in many micro-systems and is
increasingly being employed in a number of such
applications.
Some grasping principles put constraints on the
type of material that can be gripped. Where
appropriate, the material type of the top layer, a
coating for example, must be considered. Adding
coatings to parts is a possibility that enables the
application of a grasping principle which could
not have been applied otherwise. Some examples
of the relation between the grasping principle and
the material type are: (1) the hydrophilic proper-
ties of the material are important for the appli-
cation of adhesive gripping; (2) gripping using
magnetism demands ferromagnetic materials.
The interaction between the gripper and the
part takes place via the part’s force-interaction
surface. This surface must be available for force
operation throu ghout the entire pick-and-place
cycle, for example from picking up a part at a
feeding position through to releasing the part in
the final position. Technical executions of grasp-
ing principles demand a certain configuration and
shape of the force-interaction surface. Friction-
based gripping will demand at least two locations
on the side of the part for finger placement. Sev-
eral other principles only demand one accessible
part surface. In developing a grasping solution, it
should be noted that geometric constraints may
impose limitations on the availabi lity of part sur-
faces.
306 CHAPTER 18 Handling for Micro-Manufacturing
In the case of a contact-grasping principle, one
possible situation that may occur during the
release procedure is that the part may stick to
the gripper and not remain static during the
release action. In this case F
adhesion
is greater than
F
gravity
(see Fig. 18-4). This situation would
require a device that would hold the part in place
during the gripper-release procedure. Such
devices do not have to be complicated to design;
one common method to overcome this problem is
to use sticky paper with an adhesive force slightly
greater than that of the adhesive force acting on
the part and grippe r.
Grippers. Suction grippers, such as vacuum grip-
pers, consist mainly of a thin tube or pipette con-
nected to a vacuum pump. This makes this kind of
gripper cheap and easy to replace. This is impor-
tant since micro-tools are fragil e and have to be
replaced frequently. The disadvantage is that the
vacuum gripper can obviously not be employed in
a vacuum.
Tong grippers grasp a part employing friction
between the part and the gripper, usually imple-
mented using a pair of fingers. Gripping parts
based on friction certainly provide sufficient force
in many cases. Another advantage of this kind of
gripper is the ability to center the part between the
gripping jaws and to align it parallel to the jaws.
This allows more precise handling of micro-parts
by putting them in a defined location after being
gripped. This is an important attribute in a han-
dling system with a high degree of accuracy and
speed. The more reference points that can be
applied to the location of the micro-part, the
fewer sensors that will be needed to determine
the same information. However, with decreasing
part size, the parameters of the gripper-finger
dimensions need to be small also. Here a technical
problem may occur, with this method having to be
eliminated due to technical or cost perspectives.
Adhesive grippers utilize the surface forces dis-
cussed earlier. The easiest force to control is the
electrostatic force, but it is not suitable for the
manipulation of charge-sensitive devices. Sur-
face-tension forces due to air humidity can be
controlled by incorporating a micro-heater in
the gripper. In cold conditions, an object can be
picked up simply by touching it. To release the
object, the heater evaporates the water in the con-
tact. Common manipulation methods with sur-
face forces include vibration of the gripper, sliding
and inclining tools or using dual manipulators.
The disadvantage of contact strategies is that
friction between the tool and the part may gener-
ate micro-dust from the object. Contactless
grippers have several advantages compared to
conventional contact grippers. A homogeneously
distributed force enables the sensitive gripping of
fragile parts. Disadvantages include low flexibility
for different part shapes and the need for addi-
tional equipment, such as ultrasonic sources and
pressure supplies. Contactless grippers include
air-cushion grippers and ultra-sound levitation.
The principle of an air-cushion gripper is based
on a vacuum prestressed air bearing. The gripper
includes several arrays of pressure and vacuum
FIGURE 18-4 Force vectors in a contact-handling
principle.
CHAPTER 18 Handling for Micro-Manufacturing 307

nozzles. These create an air cushion, separating
the gripper and the micro-part, which is levitated
about 10 microns underneath the gripper. The
weight of the part has to be in equilibrium with
the pushing and pulling forces exerted by the air
cushion.
Another contactless gripping method is ultra-
sound levitation, which is based on a squeeze film
or acoustic standing waves. Parts can be picked
from above by the combination of ultrasonic
waves and vacuum. The vacuum forces the parts
to the gripper surface. The air cushion generated
by the high frequency oscillatio n of the ultrasound
sonotrode produces a repulsive force on the part.
Finally, there is balancing of these two forces and
the weight of the handled part. A further phenom-
enon that can be used for handling parts without
contact is levitation based on acoustic standing
waves. The arrangement consists of a reflector
and a vibrating sonotrode, the assembly being
called a resonator. The distance between the two
elements is an integer multiple of half the wave-
length. In the resonator, small parts are levitated
in the pressure nodes of the standing wave.
Sensors and Control Systems
Obtaining accurate sensor information is difficult
at a micro-scale as sensors can be too large to be
placed in a tiny environment. The main sensors
used at a micro-scale are displacement, vision and
force sensors because motion control, visual ser-
voing and force-control strategies are often
required at micro-domains. These sensors have
to be extremely sensitive as the forces and displa-
cements involved are very small. Thus, to enable
micro-manipulation, miniature sensitive sensors
are needed.
Vision Sensors. Vision systems are often used
for the recognition and positioning processes to
locate the individual micro-components. The
camera resolution must be compatible with the
size of the manipulated objects. Optical micro-
scopes and scanning-electron microscopes are
therefore used. Applications in confined spaces
require compact camera systems such as fiber-
scopes or micro-cameras.
In a meso-domain, visually servoing has been
shown to effectively compensate for uncertainty
in the calibration of cameralens systems, manip-
ulators, and workspaces. However, manufactur-
ing engineers usually prefer strongly calibrated
parts-handling systems due to cost and reliability
issues. In micro-domains precise calibration is
highly dependent on precisely modeled kinemat-
ics, which is subject to thermal-growth errors.
Two common techniques for compensating for
thermal errors include the use of expensive cool-
ing systems, or waiting several hours for the ther-
mal equilibrium of the devic e to stabilize. These
types of factors greatly affect the cost and reliabil-
ity of handling systems, therefore real-time visual
feedback can be used effectively and economically
in a micro-domain. However, there are problems
with visual control or image processing in control-
ling these systems. Some of the main problems are
low processing speeds, high costs, programming
difficulties and being error prone due to glare,
reflection and other unwanted contaminants.
Moreover, the manipulation tools may obstruct
the view. Additionally, it is important to empha-
size the problems in setting up image-processing
equipment and the long down-times that are
involved if an error occurs. Even processes that
may seem straightforward such as focusing and
aligning the camera properly become complicated
and extremely difficult to carry out at these micro-
scales.
In micro-h andling, structural vibrations due to
link flexibility must be controlled at the sub-
micron level. Control of machine vibration
becomes very important as designers attempt to
advance the state-of-the-art with faster and lighter
machines. Many researchers have examined dif-
ferent controller configurations in order to con-
trol machines without exciting resonances. Even
with a sophisticated controller it is difficult to
rapidly move flexible machines without deflec-
tions and vibrations. A more achievable goal is
to eliminate residual vibration once the machine
has achieved a desired set-point. Input shaping is a
command-generation technique that reduces
residual vibration when a machine is moved from
one set-point to another. Input shaping works like
308 CHAPTER 18 Handling for Micro-Manufacturing
a notch filter that is designed to eliminate decay-
ing sinusoidal responses.
Micro-force Sensors. A typical micro-force sen-
sor structure is fabricated by micro-machining
technology on a silicon wafer. A diode sensor
has a cold-field emission cathode, which is a sharp
silicon tip, and a movable diaphragm anode.
When a positive potential difference is applied
between the tip and the anode, an electric field is
generated which allows electrons to tunnel from
inside the cathode to the vacuum. The field
strength at the tip and the quantity of electrons
emitted (emission current) are controlled by the
anode potential. When an external force is
applied, the anode deflects and changes the field
and the emission current.
Impedance control is a strategy adequate for
both free- and constrained-motion control. It con-
sists of an imposition of behavior on the system
rather than tracking a reference value. Mechani-
cal impedance is the dynamic relation between a
force acting on a body and its motion:
ZðsÞ¼FðsÞ=vðsÞ¼MðsÞþBðK=sÞ
where Z is the impedance, F the force, v the veloc-
ity, M the mass, B the damping and K the stiffness
of the system.
Opposition of the body to the force consists of
its stiffness, viscous dampi ng and mass. The func-
tion of the impedance control is to impose the
desired values for these three parameters instead
of the real value s.
APPLICATIONS
The serial pick-and-place task has been used
extensively in the micro-manufacturing industry.
There are specific pick-and-place machines used
for placing micro-components. The aim of this
section is to show a few examples of handling
applications which may refer to different kinds
of processes, for example in micro-fabrication,
inspection and a ssembly.
Micro-fabrication
The main intr a-machine micro-handling task in a
micro-fabrication station is the packaging of the
fabricated micro-parts into a standard carrier.
Intra-machine Handling System
in a Micro-forming Application
This example consists of the design of a micro-
handling system, which arranges the micro-parts
produced by a bulk-forming machine into a stan-
dard carrier.
The forming machine is set in a specific loca-
tion and will leave the micro-pieces in an output
buffer. This buffer guides the micro-parts along a
mechanical track, like a vibra tory bowl feeder
system. A vision control strategy for actuating
on the vibration will allow the individual micro-
parts to flow in order to synchronize the buffer
release process with the load process into the car-
rier cells.
The carrier has been defined following the
DIN-32561 standard. This carrier is a small tray
able to store hundreds of small pieces on it (see
Fig. 18-5). The shape of the cells for locating the
pieces depends on the piece shape. An empty car-
rier will be attached to a 2 DOF manipulator,
which will move the carrier under the vibration
sub-system, so that the empty cells in it are exactly
below the buffer output, permitting the pieces to
FIGURE 18-5 Vibration sub-system details.
CHAPTER 18 Handling for Micro-Manufacturing 309

fall into them. The vision system indicates to the
manipulator when a micro-part is into the cell to
proceed to locate the next empty cell.
When the carrier is full, the 2 DOF manipula-
tor will move it to a specific location where the
unload sub-system will take the carrier and put it
into a cassette. The load sub-system will take
another empty carrier and load it on the manipu-
lator.
Inspection
Usually component inspection requires different
points of view. A micro-handling system can be
used to obtain all the views required for a com-
plete inspection. For example, a rotational move-
ment can be used for inspecting cylindrical sur-
faces.
Stent Inspection System. A cardiovascular
stent is a small, expandable, slotted, metal tube
that acts like a mechanical scaffold in an artery.
Cardiovascular stents have hundreds of critical
features with tight tolerances. These stents require
100% inspection over all surfaces.
Stent inspection has been traditionally accom-
plished by manually operated stereo-microscopy.
The typical drawbacks of inspecting cylindrical
surfaces with this method are non-referenced
fields of view and the focal depths of stereo-
microscopes, which increase operator fatigue
and error. Often parts are rotated under the
microscope while the operator is looking from
checkpoint to checkpoint.
Nowadays the quality control of stents is
made by an automatic visual-inspection system
but the handling process is usually manual. In
the sampling plant, the stent is inside a plastic
tube, which protects it throughout the process.
This tube is also useful for identifying one stent
from the others. An operator manually extracts
the stent from the plastic tube and inserts it into
a needle. The operator fixes the needle on a
rotary-gripping system in front of a vision sys-
tem, and then the system rotates the needle while
the vision system s cans the stent surface. Once
the automated inspection has been done, the
operator removes the n eedle and extracts the
stent from it, puts the stent into the tube again
and screws its top on.
The aim of this example is to describe a stent
quality control application without human inter-
vention. In this application all the manipulation is
done by a 6-degrees-of-freedom mani pulator. The
whole handling system is composed of different
sub-systems (carriers, unscrewing/screwing grip-
per, manip ulator, funnel system, rotating disk,
insertion pin).
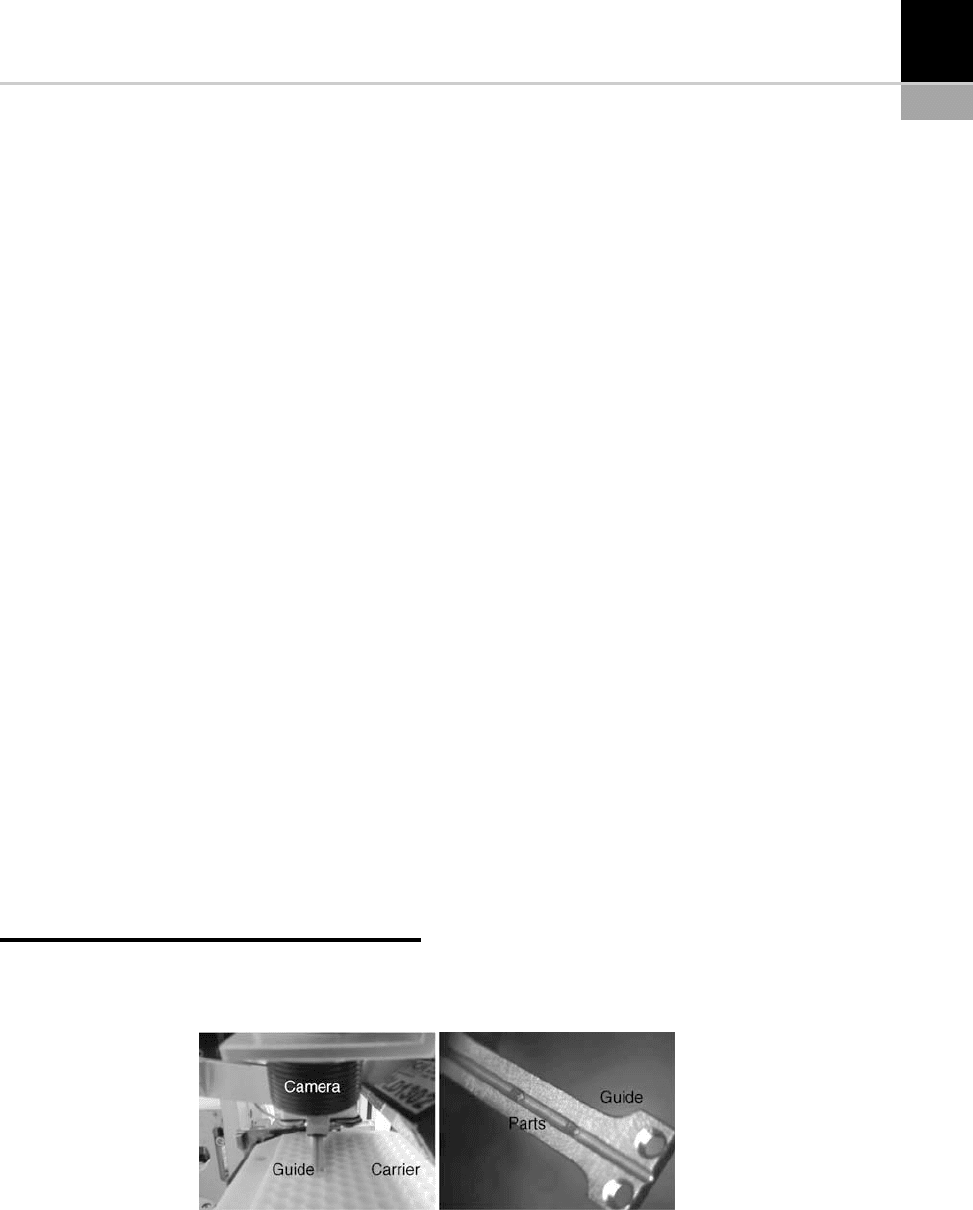
The inter-machine transport system consists of
a linear pick-and-place architecture based on car-
riers. The tube arrives in a carrier that is able to
transport nine tubes (Fig. 18-6). This carrier
approaches the inspe ction station on a powered
belt conveyor. The manipulation process is
divided into the following parts:
1. Picking: the manipulator picks the plastic tube
from the carrier.
2. Unscrewing: the manipulator carries the tube
to the unscrewing/screwing gripper and re-
moves the screwed cap.
3. Extraction: the manipulator transports the
uncapped tube to the funnel zone and empties
its content (the stent).
4. Gripping: the funnel guides the stent to a ver-
tical pin on the rotating disk, where it is
inserted by gravity and vibration principles.
A piezoelectric system mounted on the pin
holds the stent.
5. Inspection: the pin is rotated to the horizontal
inspection zone. There is a horizontal position
to perform the machine vision quality control.
6. Collection: the pin carrying the analyzed stent
is transported to the collection position, where
the stent is released and put into the tube.
7. Screwing: the tube with the stent is taken to
the unscrewing/screwing gripper where its cap
is located and then screwed on.
8. Placing: the tube is placed in a new carrier.
The first task must be the opening of the tube.
This must be done by a rotating four-fingered
gripper. The fingers of the gripper are developed
in order to accurately grip the top of the transport-
ing tube.
A 6-degrees-of-freedom manipulator is needed,
in order to be able to move the tube around the
310 CHAPTER 18 Handling for Micro-Manufacturing