Potter T.D., Colman B.R. (co-chief editors). The handbook of weather, climate, and water: dynamics, climate physical meteorology, weather systems, and measurements
Подождите немного. Документ загружается.


6 SATELLITE REMOTE SENSING
Meteorologists use two basic methods of observing the atmosphere: in situ and
remote-sensing methods. In situ methods, for ‘‘in place,’’ measure the properties
of the air in contact with an instrument. Remote-sensing methods obtain information
without coming into physical contact with the region of the atmosphere being
measured. Remote sensing the atmosphere is the emphasis of this section. In
remote sensing, radiation measurements are used to infer the state of the atmosphere.
The inference of the atmospheric state is often referred to as the retrieval process (see
page 39 for discussion of retrieval process).
There are two basic types of remote sensing the atmosphere: active sensors and
passive sensors. Active remote-sensing instruments emit energy, such as a radio
wave or beam of light, into the atmosphere and then measure the energy that returns.
Passive remote-sensing instruments measure radiation emitted by the atmosphere,
Earth’s surface, or the sun. Much of what we observe about the atmosphere using
remote-sensing techniques results from how radiation interacts with molecules or
objects, such as water drops, suspended in the atmosphere. The previous chapter
discussed the principles on which remote-sensing methods are based, while this
section looks at some applications of passive remote sensing from satellites.
Remote Sensing the Surface
In remote sensing the surface of Earth from a satellite, we select spectral regions, or
channels, in which the atmosphere is transparent. These are called atmospheric
windows. In the solar spectrum, or the shortwave, very little absorption occurs in
the visible region; however, Rayleigh scattering is large. Rayleigh scattering is well
understood and can be handled via modeling as described in the previous
chapter. There are also windows in the near-infrared spectral regions where Rayleigh
scattering is smaller.
Analysis of the spectral reflectance of different surfaces generally shows a distinct
difference between the visible and near-IR regions. Observations in both the visible
(such as 0.58 to 0.68 mm) and near-infrared (such as 0.725 to 1.1 mm) are useful for
monitoring surface conditions. Vegetation regions generally have reflectances in the
near-infrared (NIR) that range from 20 to 40%, while visible reflectances generally
range from 5 to 15%. Soils also have a higher reflectivity in the NIR than in the
visible while the opposite is true for snow.
A common method of monitoring surface vegetation is through the normalized
difference vegetation index (NDVI):
NDVI ¼
R
NIR
R
VIS
R
NIR
R
VIS
ð28Þ
This has long been used to monitor the vegetation, and changes in vegetation, of
the entire Earth. NDVI for vegetation generally range from 0.3 to 0.8, with the larger
values representing ‘‘greener’’ surfaces. Bare soils range from about 0.2 to 0.3.
376 RADIATION IN THE ATMOSPHERE: OBSERVATIONS AND APPLICATIONS
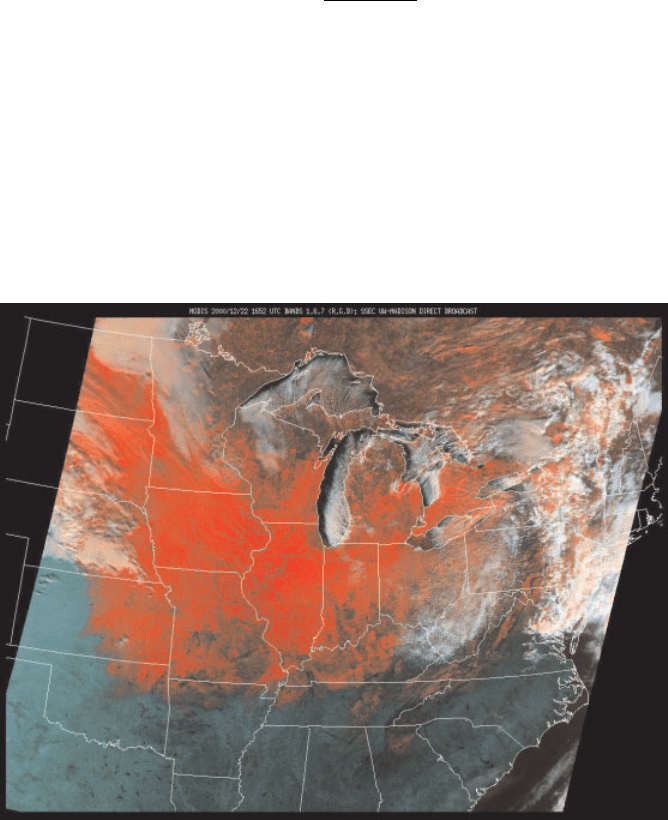
Identifying snow cover is important for weather and hydrological forecasting. To
detect the presence of snow, recent satellite instruments include observations at 0.66
and 1.6 mm (Fig. 30). The atmosphere is transparent at both these wavelengths, while
snow is very reflective at 0.66 mm and not reflective at 1.6 mm. The normalized
difference snow index (NDSI),
NDSI ¼
R
0:66
R
1:6
R
0:66
þ R
1:6
ð29Þ
is used to monitor the extent of snow cover. At visible wavelengths (e.g., 0.66 mm),
snow cover is just as bright as clouds and is therefore difficult to distinguish from
cloud cover. However, at 1.6 mm, snow cover absorbs sunlight and therefore appears
much darker than clouds. This allows the effective discrimination between snow
cover and clouds. Values of NDSI <0.4 typically indicate the presence of snow.
Figure 30 demonstrates the ability to separate clouds from snow using observations
at these wavelengths.
Sea surface temperature (SST) is another surface property we are interested in
from a meteorological perspective. An IR window in the atmosphere for sensing
Figure 30 (see color insert) False color image from a combination of observations at 0.66,
1.64, and 2.14 mm are used to detect snow. In this false color images, land surfaces are green,
water surfaces are black, snow cover is red, and clouds are white. See ftp site for color image.
6 SATELLITE REMOTE SENSING 377
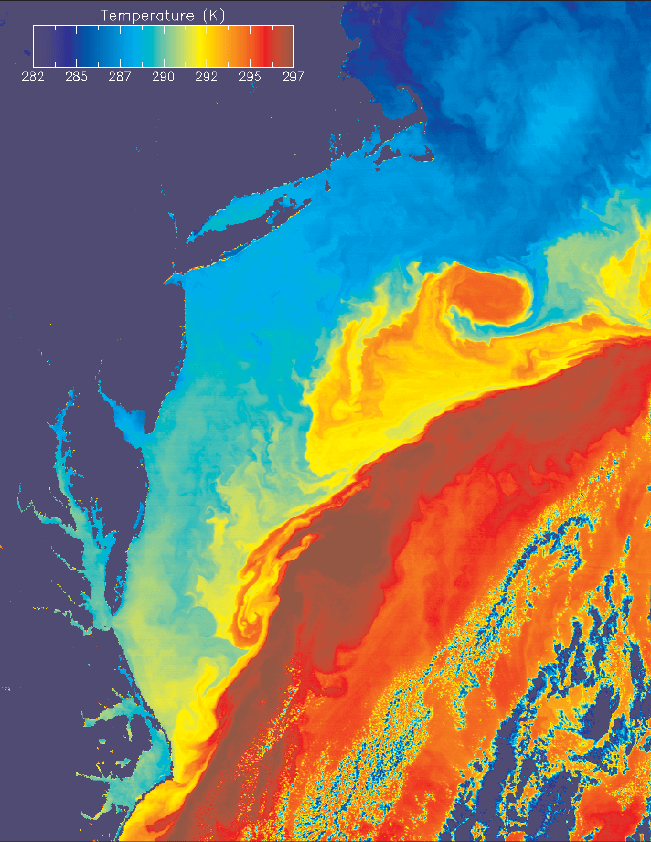
surface temperature is the 10- to 12-mm region where absorption by water vapor is
weak. Figure 31 is a MODIS (moderate resolution imaging spectrometer) 11-mm
image that clearly indicates changes of SST in the vicinity of the Gulf Stream. Most
of the radiation in this band is emitted by the surface and transmitted through the
atmosphere. In a warm moist atmospher e the difference between the SST and the
brightness temperature at 11 mm (BT
11
) can approach 10
C. This difference is often
Figure 31 (see color insert) An 11-mm image from MODIS of Atlantic Ocean off east coast
of North America. See ftp site for color image.
378
RADIATION IN THE ATMOSPHERE: OBSERVATIONS AND APPLICATIONS
corrected for by making observations at more than one wavelength, such as 11, 12,
3.7, and 8.5 mm. Differences between these channels represent the total amount of
water vapor in the column. For example, the 12-mm channel has more absorption and
therefore (BT
11
7 BT
12
) is positive; the greater this difference the larger the water
vapor loading of the atmosphere. Observations at these wavelengths are used daily to
derive SST. The SST from satellite observations is typically determined from
a regression derived empirically using observations from drifting buoys.
Remote Sensing of Clouds
Clouds are generally characterized by higher reflectance and lower temperature than
the underlying Earth surface. As such, simple visible and infrared window threshold
approaches offer considerable skill in cloud detection. However, there are many
surface conditions when this characterization of clouds is inappropriate, most nota-
bly over snow and ice. Additionally, some cloud types such as thin cirrus, low stratus
at night, and small cumulus are difficult to detect because of insufficient contrast
with the surface radiance. Cloud edges cause further difficulty since the instrument
field of view will not always be completely cloudy or clear. There are many
different methods of detecting clouds. In this section we review some of the more
common approaches.
The simplest cloud measurement technique is the threshold method in which an
equivalent blackbody temperature or a spectral reflectance threshold is selected that
distinguishes between cloud and noncloud in infrared or visible satellite images.
Information on cloud top temperature is obtained by comparing the observed bright-
ness temperature with an atmospheric temperature profile—this approach usually
underestimates the cloud height. Using a visible or near-infrared reflectance thresh-
old works well for determining clear-sky ocean scenes that are free of sun glint.
Another straightforward approach employs two channels in combination. For
example, the split window technique makes use of observations near 11 and
12 mm to detect clouds over oceans. Cloud classification is accomplished by
considering the 11-mm blackbody temperature and the difference between 11 and
12 mm. Clear scenes have warm temperatures and brightness temperature differences
that are negative, usually less than about 1
. Another simple two-channel tech-
nique uses visible and infrared observations. In this approach observed visible
reflectance and equivalent blackbody temperature are compiled, and observations
are then classified based on their relative brightness and temperature. For example,
clear sky oceans would be warm and dark while convective clouds would be cold
and bright. Classification of the cloud is accomplished by either assigning thresholds
or by employing maximum-likelihood statistical techniques.
Once clear pixels can be determined, these obser vations can be combined with
cloudy observations to derive cloud properties. One such approach is the CO
2
slicing
technique. In this technique a cloud pressure function G(l
1
, l
2
, p) is defined as an
expression involving a pair of differences of two column radiances and [I(l
clr
) and
I(l
cld
)], one clear and one cloud contaminated with a cloud at pressu re level p
c
.If
you express the observed column radiances in terms of differences, then the implied
6 SATELLITE REMOTE SENSING 379

vertical integration need only go from the surface to the cloud top because the above
cloud components subtract; then by taking the ratio of two observed radiances, you
can remove the coefficient of cloud amount that results from expanding these terms
into clear and cloudy portions. It is necessary to make an assumption that the cloud
is infinitesimally thin, so that you need only work with a single transmittance func-
tion below the cloud. This method enables us to assign a quantitative cloud top
pressure to a given cloud element using observed radiances for the CO
2
spectral
bands. Defining the radiance from a partly cloudy scene as
I
l
¼ FI
cld
l
þð1 FÞI
clr
l
ð30Þ
where F is the fractional cloud cover. The cloud radiance is given by
I
cld
l
¼ e
l
I
bcld
l
þð1 e
l
ÞI
clr
l
ð31Þ
where e is the cloud emissivity, and I
l
bcld
is the radiance from an opaque cloud. Thus
I
clr
l
¼ B
l
ðT
ps
Þtlðp
s
Þþ
ð
0
ps
B
l
ðT
p
Þdt
l
ð32Þ
I
bcld
l
¼ B
l
ðT
pc
Þtlðp
c
Þþ
ð
0
pc
B
l
ðT
p
Þdt
l
ð33Þ
where p
c
is the cloud top pressure. Integrating by parts (e.g.,
Ð
u
_
vvdx¼ uv
Ð
v
_
uudx)
and subtracting the two terms yields
I
clr
l
I
bcld
l
¼
ð
p
s
p
c
t
l
ðpÞdB
l
ðT
p
Þð34Þ
and
I
l
I
clr
l
¼ Fe
l
ð
p
s
p
c
t
l
ðpÞdB
l
ðT
p
Þð35Þ
If two wavelengths are chosen that are close to one another, then e
l
1
e
l
1
, which
leads to
I
l
1
I
clr
l
1
I
l
2
I
clr
l
2
¼
Ð
p
s
p
c
t
l
1
ðpÞdB
l
1
ðT
p
Þ
Ð
p
s
p
c
t
l
2
ðpÞdB
l
2
ðT
p
Þ
ð36Þ
In practice, the left-hand side is determined from observations, and the right-hand
side is calculated from a known temperature profile and the profiles of atmospheric
transmittance for the spectral channels as a function of p
c
. The optimum cloud top
380 RADIATION IN THE ATMOSPHERE: OBSERVATIONS AND APPLICATIONS
pressure is determined when the difference between the right-hand and left-hand
sides of the equation are a minimum.
Once the cloud height has been determined, the effective cloud amount Z ¼Fe is
determined from a window channel observation.
Fe ¼
I
w
I
clr
w
B
w
ðT
pc
ÞI
clr
w
ð37Þ
The CO
2
slicing approach is good for detecting clouds in the upper troposphere
but fails for clouds in the lower troposphere.
Remote-Sensing Atmospheric Temperature Profiles
The retrieval of the atmospheric temperature and moisture profile is often accom-
plished using spectral observations in the infrared. The appropriate equation for the
transfer of infrared radiation is
I
l
¼ B
l
ðT
sfc
ÞT
l
ð0Þþ
ð
1
z¼0
B
l
ðTÞ
dT
l
ðzÞ
dz
dz ð38Þ
where I
l
is the observed radiance at wavelength l, T
sfc
is the surface temperature, T
l
is the transmitta nce, and B
l
(T) is the Planck function containing information on the
atmospheric temperature. The term
dT
l
ðzÞ
dz
¼ W ðzÞð39Þ
is referred to as the weighting function. The intensity measured by a satellite radio-
meter due to the emission from a layer in the atmosphere at location z, is determined
from the layer blackbody emission B
l
(T) weighted by the factor W(z). The weighting
function is of fundamenta l importance to vertical sounding the atmosphere from
satellite obser vations. The weighting distribution depends on the strength and distri-
bution of the absorbing gas.
To retrieve atmospheric temperature profiles, satellite radiometers make measure-
ments in the carbon dioxide absorption bands because carbon dioxide is relatively
uniformly mixed in the atmosphere, and thus the vertical distribution is known.
Observations are made at spectral regions across the carbon dioxide absorption
band, including weak and strong absorption regions. Figure 32 shows the weighting
functions in the 12- to 15-mm spectral region of the Geostat ionary Orbiting Environ-
mental Satellite (GOES) sounder radiometer. The 14.7-mm region is a strong absorp-
tion region of carbon dioxide and so the weighting function peaks in the stratosphere.
The weighting function at 14.7 mm is near zero for pressures greater than 500 mb,
indicating that radiance observations at this wavelength receive no contribution
from the lower atmosphere and surface. The 13.4-mm spectral region is a weak
absorption region and weighting function peaks at the surface, with only small
6 SATELLITE REMOTE SENSING 381
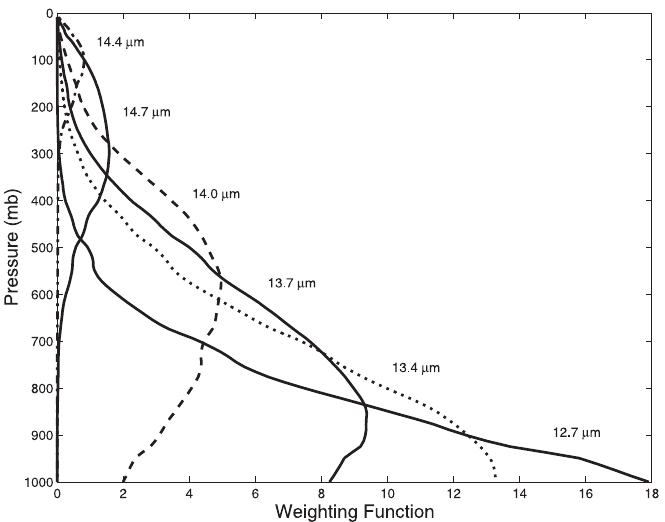
contributions in the stratosphere. The location of peak in the weighting function
indicates the region of the atm osphere that makes the largest contribution to the
radiance being measured. The width of the weighting function characterizes the
vertical resolution of the retrieval.
Given different spectral observations, I
l
, we wish to solve for the temperature
profile, given the distribution of absorbing gas. This solution is not straightforward
as the equation is nonlinear and the problem is underconstrained so that no unique
solution exists. To simplify the problem we consider the discrete form of the
radiative transfer equation
I
i
¼ðB
0
Þ
i
T
i
ðz ¼ 0Þþ
X
m
j¼1
B
i;j
K
i;j
T
i;j1
T
i;j
ð40Þ
where i represents a spectral channel and j is the atmospheric level. Or
I
i
¼ðB
0
Þ
iri
ðz ¼ 0Þþ
X
m
j¼1
B
i;j
K
i;j
ð41Þ
Figure 32 GOES sounder channels used in retrieval of temperature profiles.
382
RADIATION IN THE ATMOSPHERE: OBSERVATIONS AND APPLICATIONS
The vector I
l
represents our spectral channel observations, K
ij
is the discrete weight-
ing function elements and includes the surface term, and the unknowns are the vector
B
i,j
. Our problem is to invert this equation to solve for B
i,j
from which the tempera-
ture profile follows. The problem is underconstrained: Given I
l
we cannot say
anything about the individual values of B
i,j
. We require a priori constraints, for
example, by reducing the number of layers over which the profile is specified or
by specifying the representation of B
i,j
. The numerical methods used to retrieve
temperature from the radiance measurements are described elsewhere. Retrievals
often start with a first-guess profile, for example, from in situ radiosonde observa-
tions or a numerical forecast model. The first-guess profiles are then adjusted until
calculated radiances match the observed radiances within some threshold. Because
the observed radiances arise from deep and overlapping layers, as indicated in
the weighting function, the retrieved temperature profiles a re for layers of the
atmosphere and do not resolve the sharp temperature gradients sometimes observed
in radiosonde measurements. However, the satellite provides better spatial and
temporal resolution and can be very useful for forecasting.
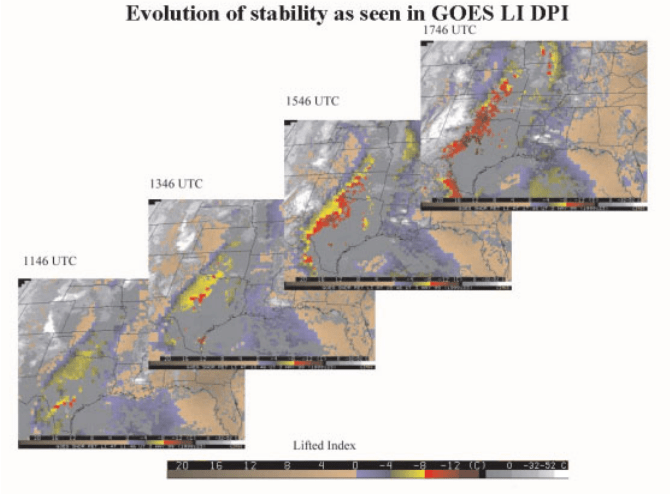
An example is monitoring the convective conditions of the atmosphere using the
lifted index. The lifted index is the temperature difference found by subtracting the
temperature of a parcel of air lifted from the surface to 500 mb from the existing
Figure 33 (see color insert) Sequence of GOES-derived lifted index on May 3, 1999. Red
regions indicate the potential areas of thunderstorm development. Strong tornadoes developed
in southwest Oklahoma before 22 UTC. The lifted index versus color code is given in the
legend. See ftp site for color image.
6 SATELLITE REMOTE SENSING 383
temperature at 500 mb. The lifted index numbers are related to thunderstorm
severity. Values less than or equal to 6 indicates conditions are very favorable
for development of thunderstorms with a high likelihood that if they occur, they
would be severe with high winds and hail. The satellite-observed lifted index on May
3, 1999, over the south central United States is shown in Figure 33. The time
sequence of the satellite-derived lifted index clearly shows (see the red region) the
region favorable for the development of severe thunderstorms.
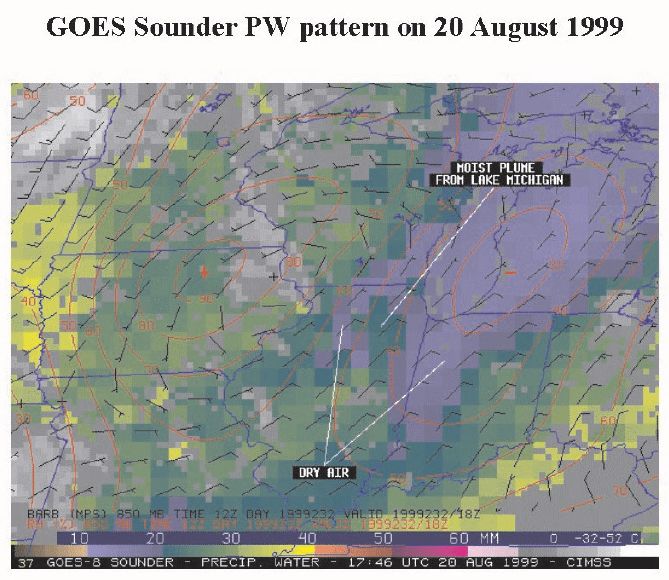
Remote-Sensing Atmospheric Moisture
Once the temperature profile of the atmosphere has been determined, infrared obser-
vations in water vapor absorption bands can be used to infer atmospheric water
content. GOES observations at water vapor absorption bands are routinely used
by the National Oceanic and Atmospheric Administration (NOAA) to derive the
vertically integrated water vapor, or precipitable water (PW). An example is shown
Figure 34 (see color insert) GOES-8-derived precipitable water on April 20, 1999. Blue
regions indicate regions of low PW and green relative high amounts of PW. The satellite
analysis clearly shows dry region south of Great Lakes. See ftp site for color image.
384
RADIATION IN THE ATMOSPHERE: OBSERVATIONS AND APPLICATIONS
in Figure 34. The GOES sequence of observations captures the large region of
relatively dry air with less than 20 mm of PW (blue enhancement) in the western
Great Lakes region on August 20, 1999. During the late morning and afternoon
hours, the GOES-derived PW shows an elongated moist region with PW greater than
20 mm (green enhancement) across Illinois.
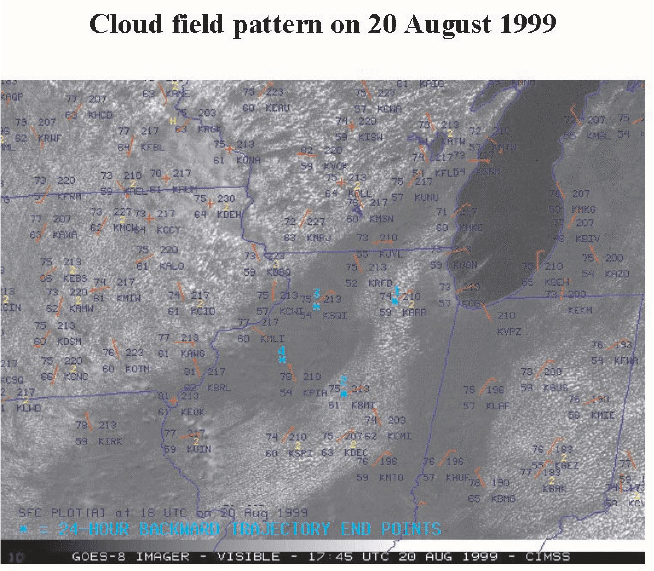
This moisture distribution impacted the cloud for mation on this day. Cumulus
formation was suppressed on either side of this moist plume, as seen in the GOES
visible image. The GOES-derived PW remained over these cloud-free areas during
the entire day (see Fig. 35).
Figure 35 GOES-8-visible image on April 20, 1999 at 1715 UTC. Cumulus clouds are
absent in the regions of low PW. See ftp site for color image.
6 SATELLITE REMOTE SENSING 385