Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Automation in Food Processing 60.2 Generic Considerations in Automation for Food Processing 1045
with a variety of sensor systems, e.g., checkweighers,
vision, and metal detectors to enhance the handling pro-
cess and combine this with online inspection.
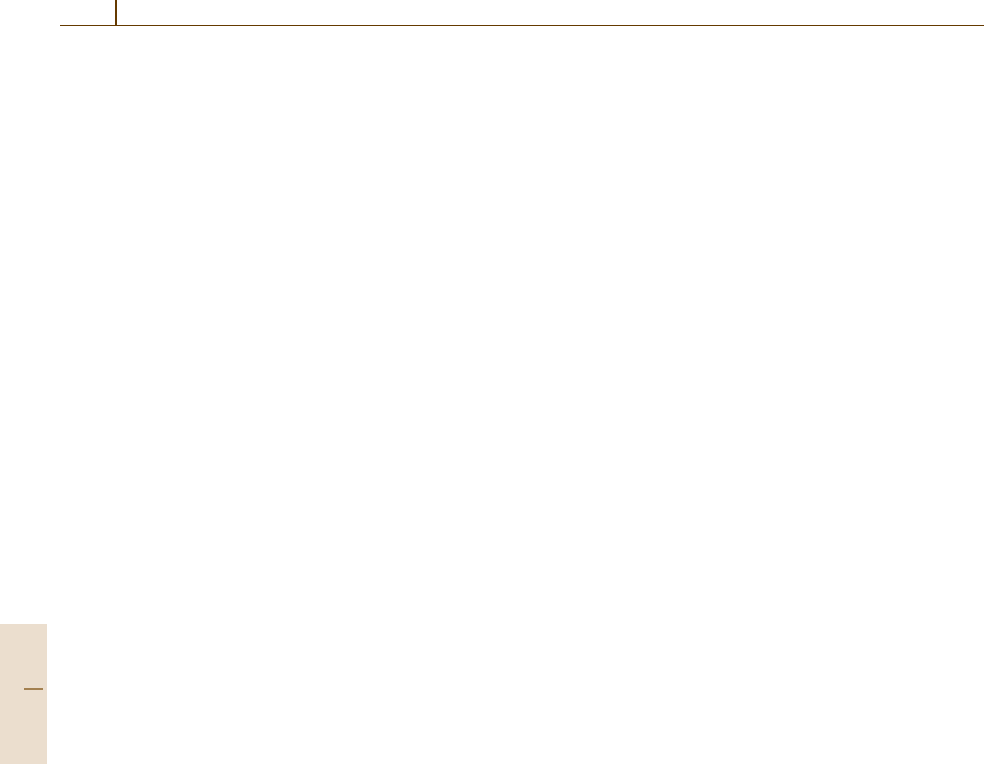
60.2.4 Joints and Seals
Careful attention should be paid to the design of joints
in automation/robotic systems to ensure that they are
both waterproof and hygienic, and avoid deep, narrow
crevices at the joints which are impossible to clean.
This is illustrated in Fig.60.2a. An improved design us-
ing a spring-energized polytetrafluoroethylene (PTFE)
face seal is shown in Fig.60.2b. Commercial seals are
available where the spring groove is filled with silicone
for use in food processing applications. Cover plates,
which provide access to the inside of food processing
machinery, are sealed using rubber gaskets. The screws
securing the cover plates should also be sealed. Small
screws can be sealed using a food-grade sealant. The
screws should have plain hexagon heads, which are eas-
ier to clean.
60.2.5 Actuators
Pneumatic cylinders are low costand commonly used in
the food industry to actuate fixed automation machin-
ery. Accurate position control of pneumatic actuators
without the use of mechanical stops is, however, diffi-
cult to achieve under either proportional or pulse width
modulation control schemes [60.13, 14]. In addition,
position control using pulse-width modulation requires
rapid cycling of the solenoid valves used to drive the ac-
tuator and this wears out the valves extremely quickly.
Hydraulic actuators are not used in the food industry, as
there is a risk that hydraulic fluid may contaminate the
product.
Electric motors are comparatively easy to control
and reliable in service. Brushless direct-current (DC)
motors, despite their higher initial cost, have a service
life many times greater than that of brushed mo-
tors, leading to increased reliability, lower maintenance
costs, and less down time. This makes brushless motors
more economical to use over the lifetime of the automa-
tion. The most significant operational issue with motors
is ensuring adequate sealing to prevent the ingress of
water/solvents during cleaning etc.
60.2.6 Orientation and Positioning
For all forms of automation knowledge of the exact po-
sition of a product is vital.This is noless truein thefood
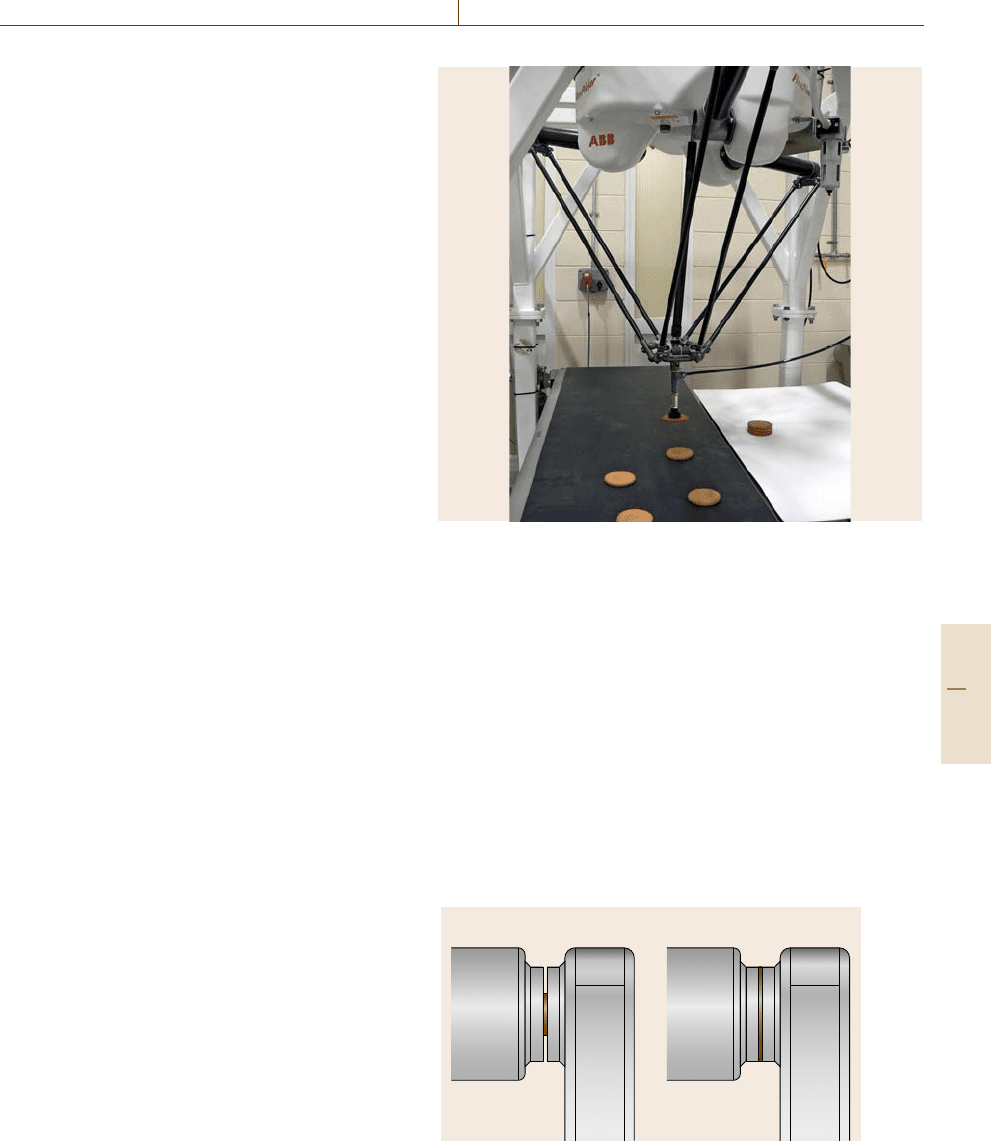
Fig. 60.1 An ABB IRB 340 used to pick and place biscuits
sector than elsewhere but in this sector a number of fac-
tors conspire to place a low value on this information.
Figure 60.3 shows a very common example of an
ordered layup of product that is taken from the produc-
tion line and placed in bins that have complete disorder.
To automate the process of recreating order from this
chaos is at best difficult and expensive and at worst cur-
rently technically impossible, but humans easily cope
with this disorder. In considering examples of this type
it is clear that within a food plant many processes that
are currently considered difficult or impossible could be
automated if greater attention were paid to the reten-
tion of position and orientation data. In some instances
this will involve changes to the handling process while
a) b)
Fig. 60.2a,b Unhygienic and hygienic robot joint design.
(a) Uncleanable gap, (b) PTFE face seal
Part F 60.2
1046 Part F Industrial Automation
Fig. 60.3 Food automation will often reverse traditional manufac-
turing aims that create disorder from the manufactured order
in others simple remedies such as properly adjusting
guides, transfer conveyors or feed rates will be sufficient
to create the order needed to satisfy the downstream
automation. This is a process that has already been
learned (often by hard experience) in other industries
but has yet to be fully appreciated by the food process-
ing sector.
At the same time it is possible to deal with aspects
of orientation and positional inaccuracies and the vi-
sion systems that are becoming increasingly common
in other industry sectors are finding useful outlets in
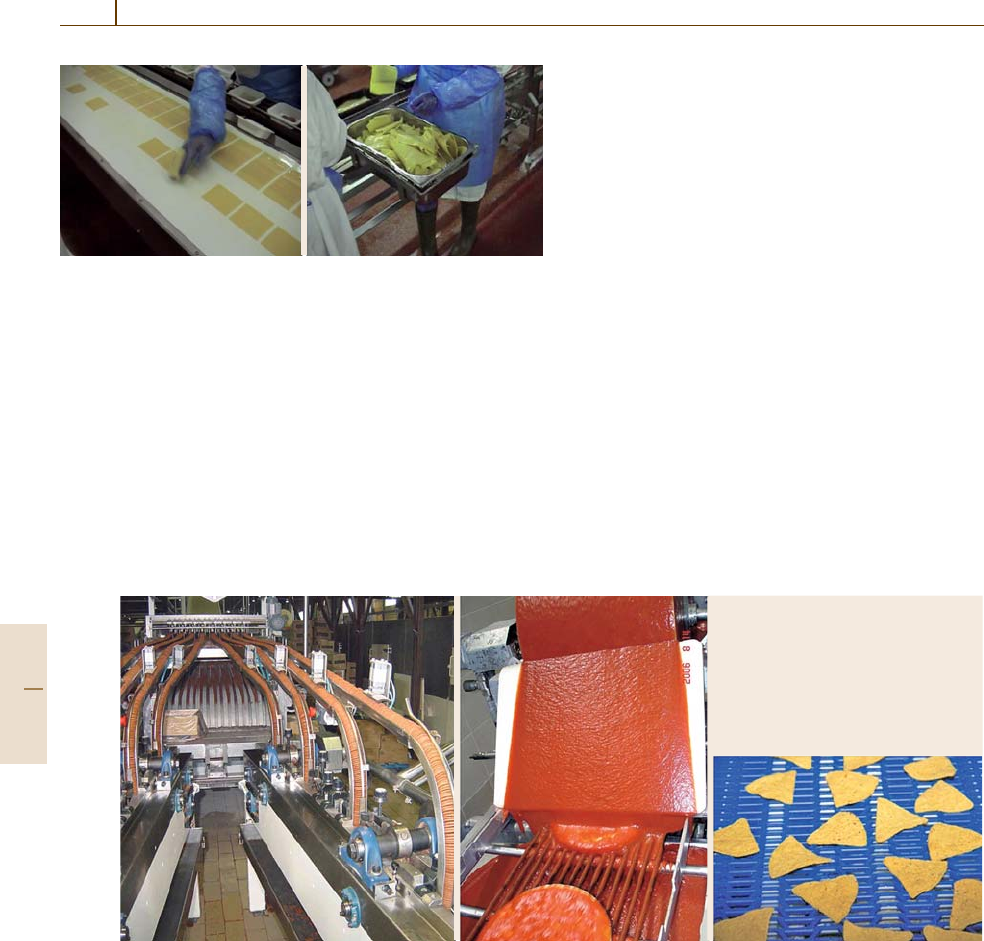
Fig. 60.4 Conveying solutions
food processing also. Indeed in the food sector the rel-
atively low tolerances (due to the product variability)
mean that vision-linked handling systems could poten-
tially be even more successful in these applications than
elsewhere.
60.2.7 Conveyors
Conveyors are typically belted transport machines
to carry products, containers, packs or packaging
along a production line or between production centers
(Fig.60.4). There are a very large number of types of
conveyor designed to operate with different products,
and selection of the correct conveyor system is essential
to good automation in the food sector [60.15]. Convey-
ors can be formed as stand-alone linear or curved units
or they can be integrated into complex transportation
networks custom-designed for each factory application.
In their simplest forms the conveyor merely moves
product from point A to B but they can be integrated
with control systems, advanced drives, programmable
logic controllers (PLCs), sensors etc. and form an inte-
gral part of good automation.
60.3 Packaging, Palletizing, and Mixed Pallet Automation
One area of food production that has seen signifi-
cant use of automation is end-of-line operations. For
many years, food manufacturers have successfully used
traditional hard automation, including wrappers, top
loaders, and side loaders, to package easy-to-handle
products, e.g., cartons, boxes, trays, bags, and bottles.
In this area of the food production cycle the product
has been changed from the highly variable food prod-
uct into a containerized unit. Within the end-of-line
packaging operations there are therefore a number of
Part F 60.3
Automation in Food Processing 60.3 Packaging, Palletizing, and Mixed Pallet Automation 1047
key areas that have wide application across the sector
(Fig.60.5).
These include aspects such as labeling, check-
weighing, inspection (visual, metal detection etc.), and
palletizing.
60.3.1 Check Weight
The checkweigher is an automatic machine for mea-
suring the weight of packaged commodities and hence
ensuring that the product is within specified limits
(Fig.60.6). Any packs that are outside the tolerance
are ejected from the line automatically and may be
reworked. Although there are many forms of check-
weigher they generally follow a fairly common format.
From the main production flow line the product is trans-
ferred to an accelerating belt that spaces products that
are often closely located on the line. This means that in-
dividual products can be weighed without interference
from neighbors. The weigh station is an instrumented
conveyor belt incorporating a high-speed transducer
(typically a load cell), with user interface and often
data ports for Ethernet etc. At the outflow of the check-
weigher there is a reject conveyor to remove out-of-
tolerance packs without disrupting the normal flow. The
reject mechanism is automatic and may involve a vari-
ety of approaches such as air jets and mechanical arms.
Checkweighers can have a throughput of up to 750
products per minute. The communication ports ensure
that the checkweigher can be integrated into the whole
plant operation, communicating production data etc.
and forming part of a full SCADA (supervisory control
and data acquisition) system. By controlling and moni-
toring the throughput of the checkweigher it is possible
to detect out-of-performance upstream operations and
to dynamically change the performance of the upstream
operations by adjusting their set-points. Unfortunately
this is seldom achieved and machines often run with
poor adjustments thatincrease reject rates or overfill and
hence gives away product. In addition, by integrating
production of several linesor monitoringdata over time,
it ispossible topermit some underweight product,as the
overall average is within tolerance and the data from the
checkweigher can validate this. This can significantly
reduce wastage and has potential enormous savings.
60.3.2 Inspection Systems
Other inspection stations within the typical produc-
tion line include metal detection and also on occasion
Fig. 60.5 End-of-line automation
x-ray machines (Fig.60.6). These systems are primarily
installed as safety systems to prevent physical con-
tamination of food. In the instance of metal detectors
which operate by enclosing the whole of the production
conveyor belt, the product passes through the detector,
which is tuned to detect small metal shards that may
have become located in the food product. If the sen-
sor is triggered the product is automatically rejected
but in this instance there is no rework and indeed the
product is usually inspected closely to discover the
type of contamination and to ensure that this is elim-
inated. Metals detection is present on almost every
production line. X-ray machines, although slightly less
common, are used to check for nonmetallic contami-
nation, e.g., glass, plastics, bone, and fibres, and also
in some meat products as a quality control system to
identify gristle.
Part F 60.3
1048 Part F Industrial Automation
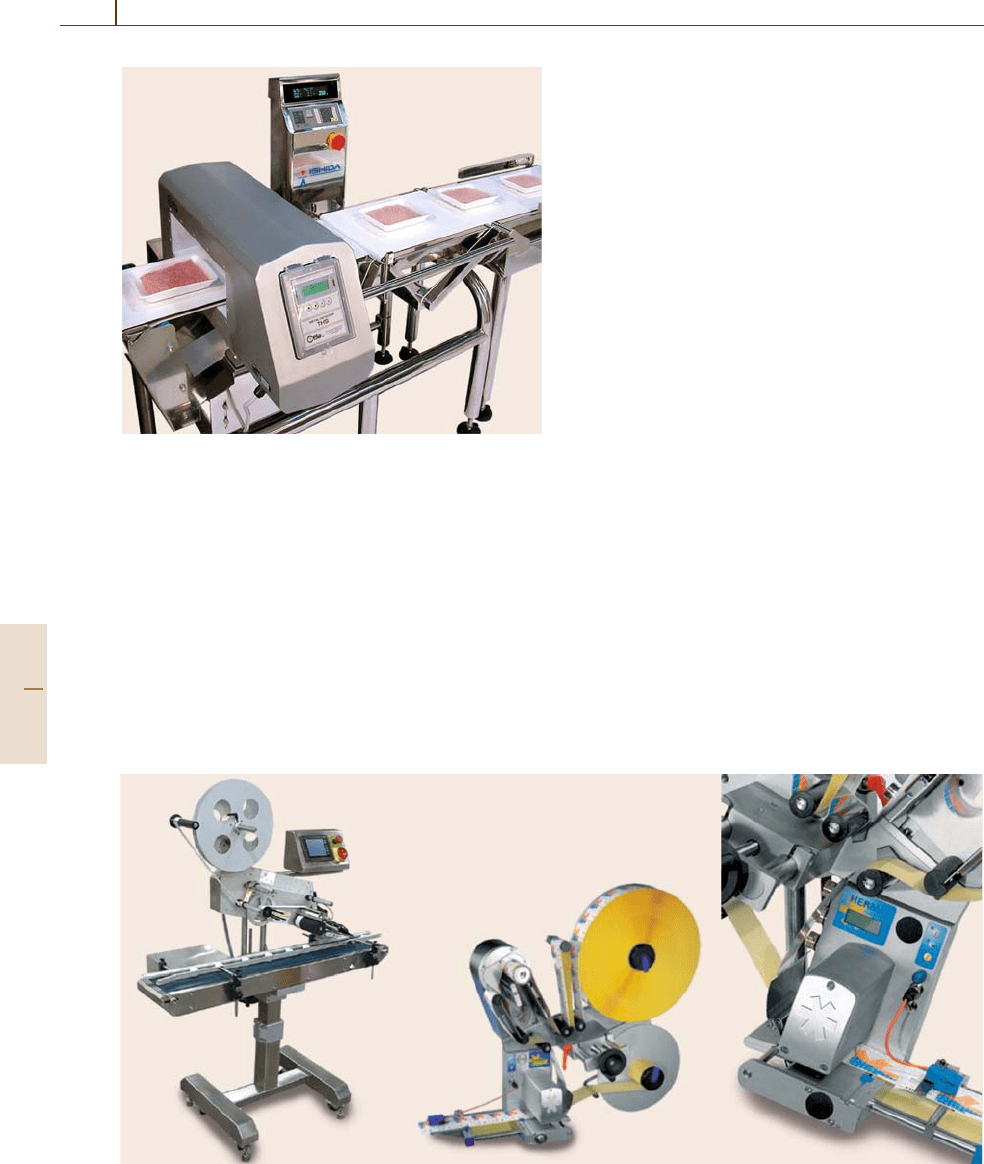
Fig. 60.6 Combined check weight and metal detectionsta-
tion
60.3.3 Labeling
Labels are used on every kind of product to brand, dec-
orate or provide information, and in the food sector
it is not uncommon that a label fulfils all three func-
tions simultaneously (Fig.60.7). Labeling is one of the
final aspects of the production process and may be in-
dependent or integrated with other systems such as the
checkweigher and inspection systems. There are two
main types of labeling machine: wet glue and self-
adhesive (pressure-sensitive) applicators. For the food
Fig. 60.7 Labeling stations
processing industry self-adhesive labelers are by far the
more common, using preglued labels that are supplied
on a reel of release paper or film. This method of ap-
plication enables labels to be applied at medium/high
speed to soft packages as well as rigid containers. This
is very suited to the food sector.
60.3.4 Palletizing
The pallet is the fundamental loading and trans-
portation unit for most food operations. As such,
automation of the warehousing and palletizing op-
erations for food companies, as in most industry
sectors, is potentially one of the most profitable ar-
eas. As with most industry sectors many features
influence the selection of automation for palletiz-
ing, including line speeds, factory layout, space at
the end of production lines, and of course cost, but
in food operations there is also the advantage that,
by the time the products reach the palletizing stage,
the packaging has usually created a fairly repeat-
able form that is missing in many other upstream
areas and this is therefore one of the easiest areas to
automate.
While it can be recognized that there are many fea-
tures in common with other industry sectors, one recent
trend that is particularly strongly driven in the food
sector is the assembly of mixed product pallets, which
reflected demand from retailers for custom pallet loads
that suit the store rather than the shipper. The mixed
load pallet is therefore emerging as one of the most ef-
Part F 60.3
Automation in Food Processing 60.4 Raw Product Handling and Assembly 1049
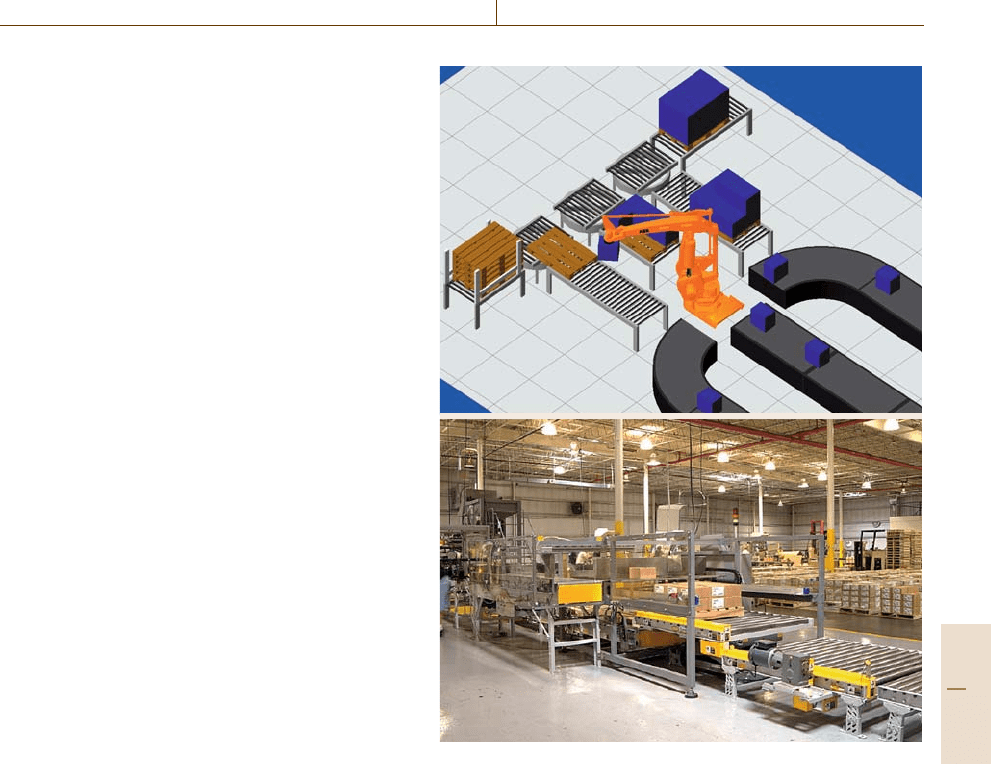
Fig. 60.8 Robotic palletizing
ficient technologies available in the food supply chain
process.
To address these demands and opportunities and the
use of multiple feeder lines and rapid pattern changes,
the automation industry has focusedon thedevelopment
of software needed to pick the product and design the
pallet, the hardware to recognize the product (sensors
which are often visual based), hardware to manipulate
the product (often robots), and the integration of the
hardware–software solutions (Fig.60.8).
Within the robotic community there have been
important developments in the software to optimize
picking, placement, and overall construction of di-
verse pallets, with many robot manufacturers, software
houses, and systems developers introducing dedicated
software that will allow online pallet preparation to
meet thedemands of the manufacturer and, more impor-
tantly, the retailer. These software systems can be fully
integrated with external systems, e.g., machine-vision
systems and image processing or other sensors to detect
the presence of the product and its position and orienta-
tion, and this information can be directly communicated
to a manipulation system, which is typically robotic,
to allow flexibility in programming and motion con-
trol. This comprehensive integration of all components
into one platform facilitates efficient communication
and guarantees reliable robot operation. These software
packages typically integrate only with one robot man-
ufacturer’s product line and it is therefore necessary to
use combined hardware and software solutions. Integra-
tion suppliers can often integrate nonstandard units but
this has a significant cost implication.
To address the increasing need for and use of robots
in the food industry a number of robot manufactur-
ers have or are developing products specifically for
these applications. However, to date very few com-
mercial robots have been developed specifically for the
food industry. Often, existing models have simply been
upgraded for use in food production and this has cre-
ated a negative impression among sections of the food
industry. Examples of industrial robots that are cur-
rently used for primary packaging and assembly of
foods include the ABB IRB 340 FlexPicker (probably
the most common robot in high-speed pick-and-place
applications and well suited to handling wrapped and
baked products) and Bosch Sigpack Delta robots, the
FANUC LRMate 200iBfood robot, Gerhard Schubert’s
TLM-F4, and more recently the FANUC M-430iA/2F,
which has a sleek profile with no food particle retention
areas.
60.4 Raw Product Handling and Assembly
While the use of robots and advanced automation for
end-of-line operations such as case packing and pal-
letizing is already well established, robotics/automation
of primary handling and assembly of foods has so far
been limited. However, since financial justification for
the installation of an automation/robotic system is typ-
ically based on the reduction of labor costs and the
bulk of manual labor in a food production line is gen-
erally concentrated in primary packaging and assembly
operations, this is the area that requires the greatest con-
centration of effort.
As already noted products handled by traditional
automation are usually homogenous in terms of size,
shape, and weight and also tend to be rigid; however,
some or all of these conditions do not prevail in food
processing. Food is very often fragile and, unless ex-
treme care is taken during handling, products can be
damaged and in the worst case this can mean they have
to be discarded.This means thatthe handlingtechniques
used in traditional automation aregenerally not suited to
the handling of raw food products and the mechanism
of grasping the food product (rather than basic motion)
is often the key to successful automation.
Taylor [60.15] classified the gripping techniques for
nonrigid materials into three separate classes defined by
the mechanism of the grasp:
Part F 60.4
1050 Part F Industrial Automation
Mechanical techniques – the product is firmly
clamped between two or more mechanical fingers and
held due to the friction contact. To minimize the grip
force the gripper jaws can be compliant or specifically
shaped to the particular object. This can only be used
where variation between products is relatively small.
Intrusive grippers – pins are fed into the surface or
body of the material to be lifted. The pins are precisely
located so that when inserted the object becomes locked
to the gripper. This technique is generally unsuitable
for food products, as it would often cause unacceptable
levels of damage.
Surface attraction – adhesives or a vacuum are used
to create a bonding force between the gripper and prod-
uct. Vacuum grippershave been successfully used in the
food industry and are well suited to objects with regular
or flat surfaces, such as biscuits. However, not all food
items can be handled with such grippers due to diffi-
culties in achieving an airtight seal, bruising, and the
inflow of particles that could lead to microbial growth
unless equipment is sterilized regularly.
As can be seen above designing mechanisms to
grasp food products is not straightforward and the
techniques used in other industries cannot be di-
rectly applied. Different types of food product present
different challenges and as a result there are numer-
ous examples of grippers that have been developed
for use in the food industry which address these
challenges.
60.4.1 Handling Products That Bruise
There are many food products that are easy to bruise.
These are typically fruits and vegetables,but other prod-
ucts can also develop unsightly marks if grasped too
firmly. For this reason handling techniques that min-
imize forces and pressures must be developed. One
example of a product that is particularly susceptible to
bruising is the mushroom. Although not immediately
obvious a bruise can appear on a mushroom as long as
several days after being handled. This can mean that,
while a productmay appear acceptablewhen dispatched
from a factory/farm, it can appear damaged by the time
it reaches the retailer/customer.
Mushroom harvesting is typically performed manu-
ally and, despite the delicate capabilities of the human
hand, mushrooms do become bruised during manual
harvesting. An automated system for the harvesting
of mushrooms was produced by Reed et al. [60.16]
with the aim of reducing labor but also reducing
product damage. The design of the system paid par-
ticular attention to the delicacy of the mushroom
contact.
The mushroom harvesting process consists of four
main stages: first the position of an individual viable
mushroom is obtained, followed by picking and trim-
ming of the mushroom before placing it in a container.
The location of the mushroom is obtained from a vi-
sion system mounted vertically over the mushroom
bed. Image-processing software identifies and numbers
each mushroom and then determines how best to pick
them. Mushrooms below a certain size threshold are
disregarded and are left to be harvested another day.
An isolated mushroom is easy to pick, but this is not
typically thecase andusually mushroomstouch or over-
lap. The control software must therefore determine the
best way to extract each mushroom without disturb-
ing those around it. This is achieved by bending the
mushroom away from those that surround it before
picking.
The mushrooms are grasped using a vacuum cup
mounted through a compliant link to a rack and pin-
ion allowing the cup to be positioned on the surface of
the mushroom. The cup is then twisted about the verti-
cal axis to break the mushrooms base and allow it to be
removed. A turret mechanism was also included, which
allowed the most appropriately sized cup to be used for
the particular mushroom being grasped.
The contact between the vacuum cup and the mush-
room is the source of potential produce bruising and so
determining the optimum vacuum force is critical. Ex-
periments revealed that the force of the vacuum on the
mushroom produced a faint mark on the mushroom dur-
ing grasping but this was not considered by the industry
to be unacceptably severe. However, if slip occurred
between the mushroom and vacuum cup during rota-
tion this resulted in unacceptable shear damage on the
mushroom’s surface.
Once a mushroom has been removed from the
ground it is placed in a fingered conveyor with the stalk
pointing vertically downwards. A blade then removes
the lower section of stalk which is discarded and the
trimmed mushroom is placed in a plastic tray ready for
dispatch. The mushrooms are not dropped as this would
result in denting and bruising. Thecomplete system was
trialled at a commercial mushroom farm in The Nether-
lands and by the Horticultural Research International
in the UK. The average picking speed of the system
was nine mushrooms per minute and in both of these
trials the amount of mushroom bruising and damage
was found to be significantly lower than when manual
picking was used.
Part F 60.4
Automation in Food Processing 60.4 Raw Product Handling and Assembly 1051
60.4.2 Handling Fish and Meat
While less susceptible to bruising than fruits and veg-
etables, meat and fish present their own grasping
challenges. Due to the ease with which such products
deform a traditional parallel jaw gripper is typically un-
able to grasp them with sufficient firmness. Similarly
vacuumgrippers havehad onlylimited successgrasping
meats since the fleshy nature of meat means that un-
sightly peaks can be produced when a vacuum force is
applied. Also moisture on the surface of the meat can be
drawn into the vacuum system, causing blockages and
contamination as well as reducing the moisture content
of the product.
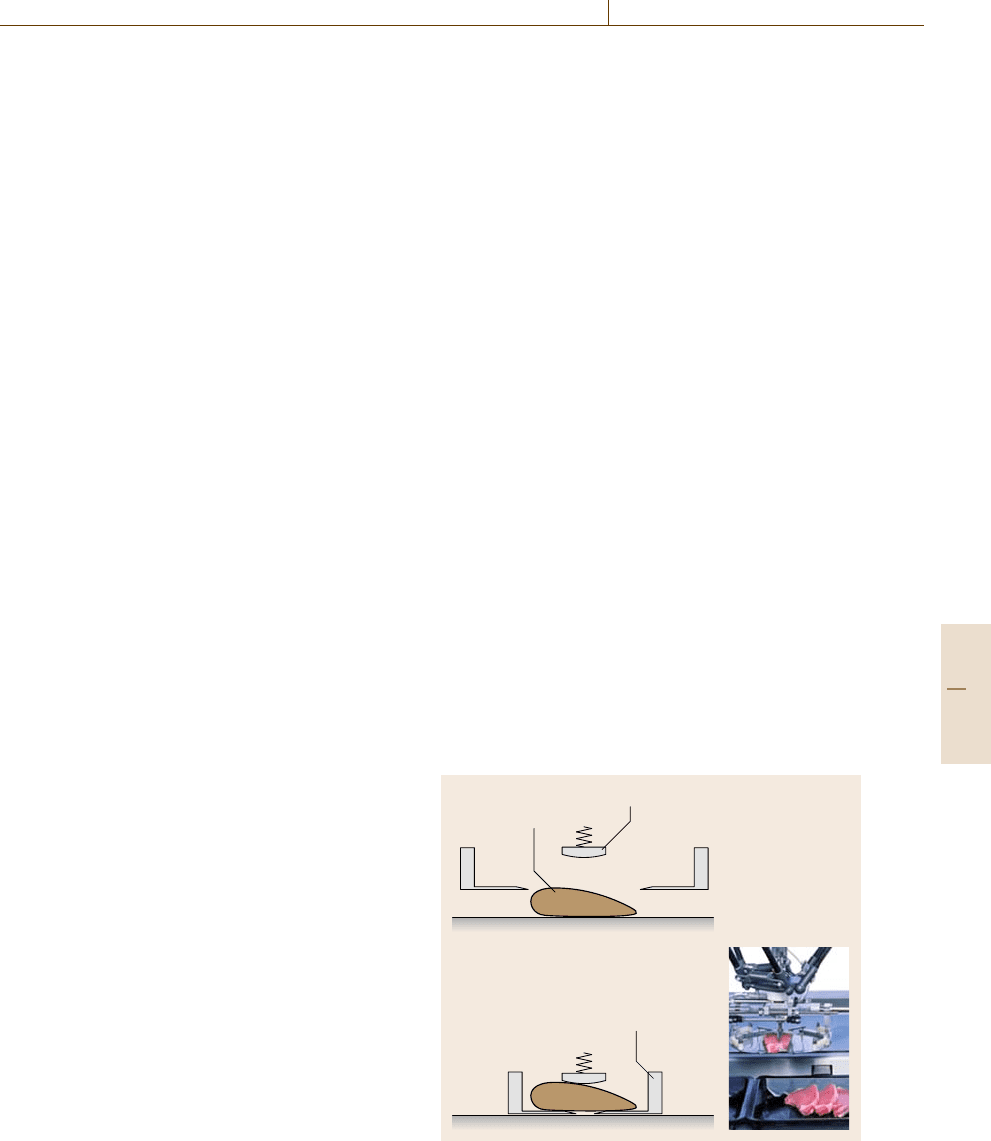
For the above reasons a number of alternative ap-
proaches have been proposed to address the problem
of handling meat. Khodabandehloo [60.17] proposed
a gripper with similar functionality to the human hand
which could use its fingers to grasp a product. A full
dexterous hand would be unnecessarily complex and
as yet no such system has been demonstrated in an
industrial environment, however the principle still ap-
peared promising and a multifingered gripper was
developed [60.17], formed from a solid piece of flexi-
ble rubber. An internal cavity was created at the finger’s
knuckle which could be pressurized by an external air
supply. As the cavity was filled with air it expanded,
causing the rear surface of the finger to elongate. Due to
the location of the cavity the front surface of the finger
remained unextended. As the finger was formed from
one solid piece of rubber this difference in extension
caused the knuckle to flex.
A hand consisting of four such fingers was devel-
oped and tested at the University of Bristol, UK. It was
positioned so that two fingers were located on each side
of the piece of meat to be lifted. When activated, the
fingers curled around the meat, creating a grasp. Due to
the compliant nature of the fingers they did not create
damage to the surface of the meat as there was no hard
contact. Due to the low number of mechanical parts and
lack ofmoving linkagesthe gripperwas very wellsuited
to the hygiene requirements of the food industry as the
gripper could be washed or hosed down without risk of
damage.
Whilst proving effective at handling some cuts of
meat the Bristol University gripper was unsuited to
grasping steaks or thin slices of meat as they deform
too much for the fingers to produce a secure grasp.
An alternative approach is the Intelligent Portion
Loading Robot produced by AEW Delford Systems
Ltd. [60.18]. This system is robot based and is able
to handle and manipulate a broad range of meat types
including both bone-in and boneless portions, fish,
cheese, and sliced products. Meat is fed to the system
on a conveyor where a vision system determines the po-
sition and orientation of the product to be handled. An
ABB IRB 340 FlexPicker robot fitted with a novel end-
effector developedby AEW Delford is then used to pick
each product and transfer it to packaging or a further
processing machine.
The end-effector’s design is simple with a low num-
ber of parts, making it well suited to the needs of the
food industry. The end-effector is essentially a high-
speed paralleljawed gripper. Each jaw consists of a very
thin plate which, when the gripper activates, is forced
under the product as can be seen in Fig.60.9a,b. The
low profile of the jaws means they can be inserted under
the product without damaging it. Although the lateral
force applied to the product as the jaws are closed is rel-
atively low it is still possible that this might dislodge the
product slightly.In order to prevent this, a spring-loaded
guide plate rests on the upper surface of the product
being lifted whilst the jaws close.
Fish pieces can be particularly difficult to handle as,
due to their structure, they can crumble when handled,
breaking into many pieces. Gjersted [60.19] developed
a needle gripper for the picking and packing of pieces
of fresh, cooked and uncooked fish.
The gripper operates using a surface hooking prin-
ciple [60.19] and uses numerous pins which enter the
product simultaneously from opposite sides. The pins
are angled slightly towards the center of the product
Chicken
portion
a)
b)
Guide plate
Jaw
Fig. 60.9a,b AEW Delford gripper raised (a) and lowered
with jaw closed
(b)
Part F 60.4
1052 Part F Industrial Automation
and as a result when inserted they physically lock the
fish firmly in place, which means it can be handled and
accelerated rapidly without fear of being dropped. The
only way thatthe product can be dropped whilst the pins
are still inserted is if the product breaks apart, but this
is unlikely to happen as, whilst the pins are in the prod-
uct, they form an internal support structure which helps
keep the product in one piece.
The gripper was developed according to European
Hygienic Engineering and Design Group (EHEDG)
principles for hygienic design, meaning it meets with
the stringent requirements of the food industry. The
gripper has been tested successfully with both salmon
and cod and demonstrates excellent holding capability
with minimal impact on the product surface and the
overall product quality. In fact the impact on product
appearance and quality was judged to be less than when
conventional human handling was used.
60.4.3 Handling Moist Food Products
Within the food manufacturing industry it is extremely
common that the materials to be handled are moist. This
can be a result of washing, cooking or cutting or in-
deed just due to the nature of the product. This moisture
can often make traditional grippers ineffective and so
a number of novel techniques have been developed.
Sliced tomatoes and cucumbers used in a wide
varietyof products,e.g., saladsand sandwiches, are typ-
ically washed and sliced in a secondary part of a factory
using large-scale slicing machines capable of process-
ing many kilos per minute. Once sliced the product is
deposited into trays and delivered to production lines.
The high water content of most vegetables and the
nature of the cutting process means that slices have
a high residual moisture on their surfaces and cannot
be placed directly into the product, which would be-
come soggy reducing customer appeal, although it has
no significant hygiene issues. To reduce this sogginess
and improve shelf life the sliced vegetable trays are left
to drain, for at least 2h, before being used. The ef-
fectiveness of this method is highly variable, with the
upper layers of ingredients draining more thoroughly
than those towards the middle or bottom of the tray.
After draining, the trays are delivered to the assem-
bly lines, where operators pick individual slices from
the trays and place them in the assembled product, e.g.,
sandwiches. It is extremely difficult to do this without
further damaging the slices and as a result it is not un-
common for the center of tomatoes to become detached.
Furthermore the moisture causes the slices to stick to-
gether and the operators have to separate them, slowing
the overall process. For this reason a production line
working at 50 sandwiches per minute can typically have
four operators just placing tomato slices and a similar
number handling cucumber.
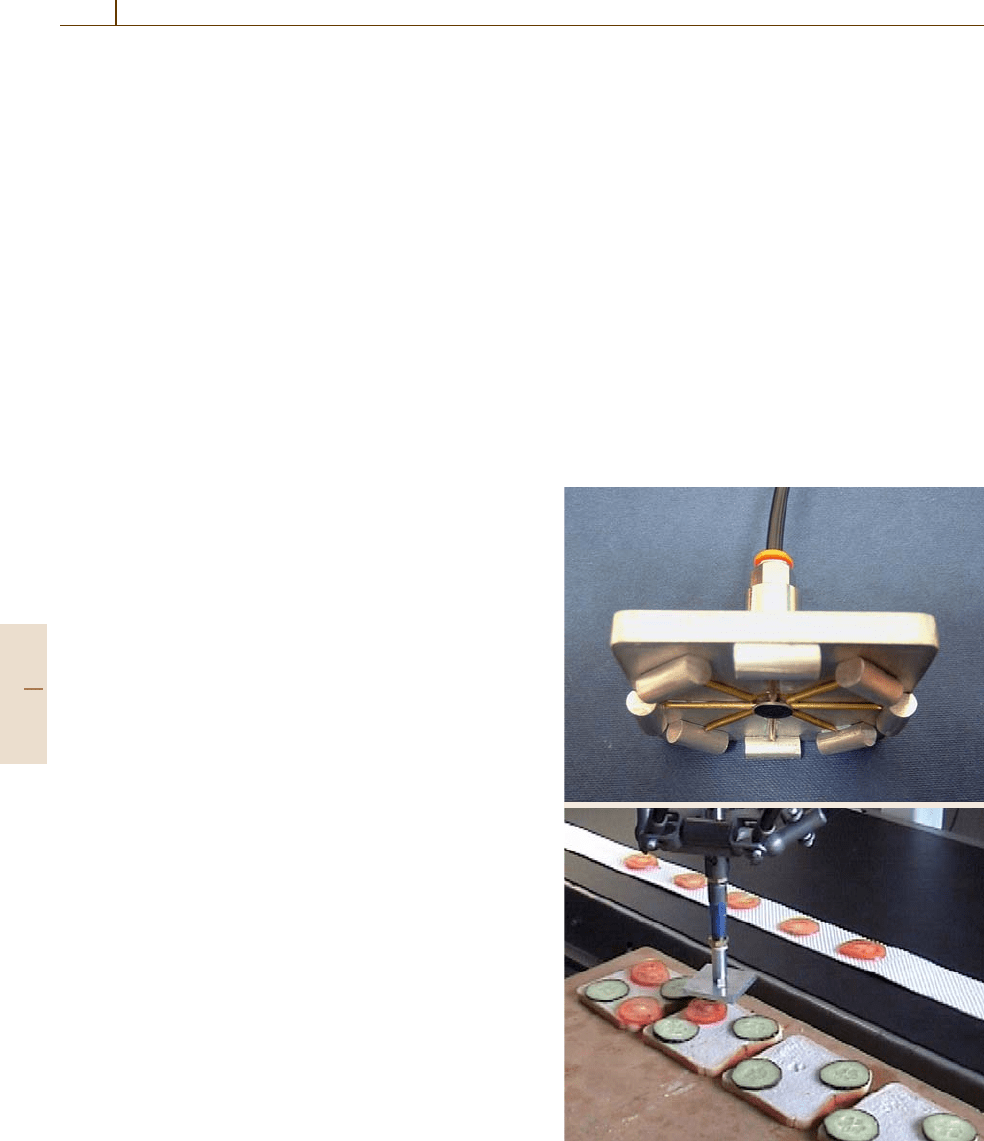
Davis et al. [60.20] proposed an automated sys-
tem for the handling of sliced tomato and cucumber
based on a novel end-effector. The solution involves
cutting slices on the actual assembly line for imme-
diate use. A slice would only be cut when required
and thus the need to pick an individual slice from
a tray is removed. Once cut, each slice is grasped us-
ing a noncontact Bernoulli gripper and a robot places it
as required (Fig.60.10).
A Bernoulli gripper operates using compressed air
and a flat gripping face. Deflectors on the surface of the
gripper direct the supplied air so that it radiates from the
center of the gripper across the surface. When the grip-
a)
b)
Fig. 60.10 (a) Noncontact Bernoulli gripper. (b) Gripper
handling tomato
Part F 60.4
Automation in Food Processing 60.4 Raw Product Handling and Assembly 1053
ping surface is brought close to an object to be grasped
the gap through which the air travels becomes reduced.
To maintain the volumetric air flow through the gripper
this results in an increase in air velocity. The rapid flow
of air between the object and gripper generates an at-
tractive force in line with Bernoulli’s principle. It is this
force which allows the object to be grasped.
As well as lifting the products the gripper is also
able to remove moisture from the object being handled
using the air-knife principle where moisture is atomized
by the air and blown off the surface.
Another technique developed for lifting moist
products is the cryogenic gripper. Stephan and
Seliger [60.21] developed a freezing gripper for use
in the textile industry which created a bond between
the gripper and products by freezing moisture on the
surface of the product using a Peltier element. The re-
ported grip forces were as high as 3.5N/cm
2
after 3s
of freezing with release after 1s.
Although this gripper was developed for use in the
textile industry the technique appeared to have potential
in the food industry. To assess this, the Food Refriger-
ation and Process Engineering Research Center at the
University of Bristol, UK [60.22] carried out tests on
cryogenic grippers for the food industry. They were
particularly interested to determine whether such tech-
niques could be used to lift sheet-like food materials
such as lasagne, sliced fish, cheese, and ham. Similar
results to the work of Stephan et al. [60.21] regarding
grasp times were obtained, however, unforced release
times were found to be poor and mechanical release
methods were found to produce unacceptable damage
to the products’ surface. Nonetheless it is suggested
that with further development work a viable gripper can
probably be developed that has the potential to be very
useful in some sectors of the food industry, e.g., frozen
foods.
60.4.4 Handling Sticky Products
Many food products are sticky and, whilst there is
usually no problem developing automated systems for
grasping such objects, releasing them can often present
a challenge. The glacé cherry is an example of one such
product. When handled with a traditional two-jaw grip-
per the cherry is found to stick to one of the jaws when
released [60.23]. This meant that the cherry could not
be positioned accurately. Reed et al. [60.23] developed
a unique gripper for the production of Bakewell tarts.
These small cakes require a decorative cherry to be
place at the center of each cake and therefore a method
of picking and reliably releasing a single cherry was
developed.
The gripper developed is a two-fingered parallel jaw
mechanism as shown in Fig.60.11a. As with a standard
gripper the jaws are closed and an object is held by
a frictional grasp. However, the unique feature of this
gripper is that the contact surface of each jaw is covered
in a polyester film. This film takes the form of a narrow
tape which is wound onto spools (Fig.60.11). When the
gripper releases an object a length of tape is wound off
the inner spools and onto the outer spools as shown in
Fig.60.11.
To release anobject thespools arerotated and there-
sultant motion of the polyester tape on each jaw causes
the object being grasped to be transported downwards.
At the tips of the jaws the tape doubles back on itself
and this causes it to peel away from the object being
held and therefore release it. The sharpness with which
the tape doubles back on itself is vital. If insufficiently
sharp it would be possible for the object to remain stuck
to one of the tapes and be transported along the out-
side of the jaw. An appropriately tight turn ensures that
the contact area between the tape and object is so small
that the resulting adhesive force is not large enough to
support the weight of the object.
In addition to its ability to handle sticky objects
this gripper can be used to position objects in con-
fined spaces as the jaws of the gripper do not need
to be opened during product release. This makes the
gripper particularly well suited to placing objects into
boxes. Reed et al. demonstrated how the gripper could
be used to place petits fours and fondants into presenta-
tion boxes [60.23].
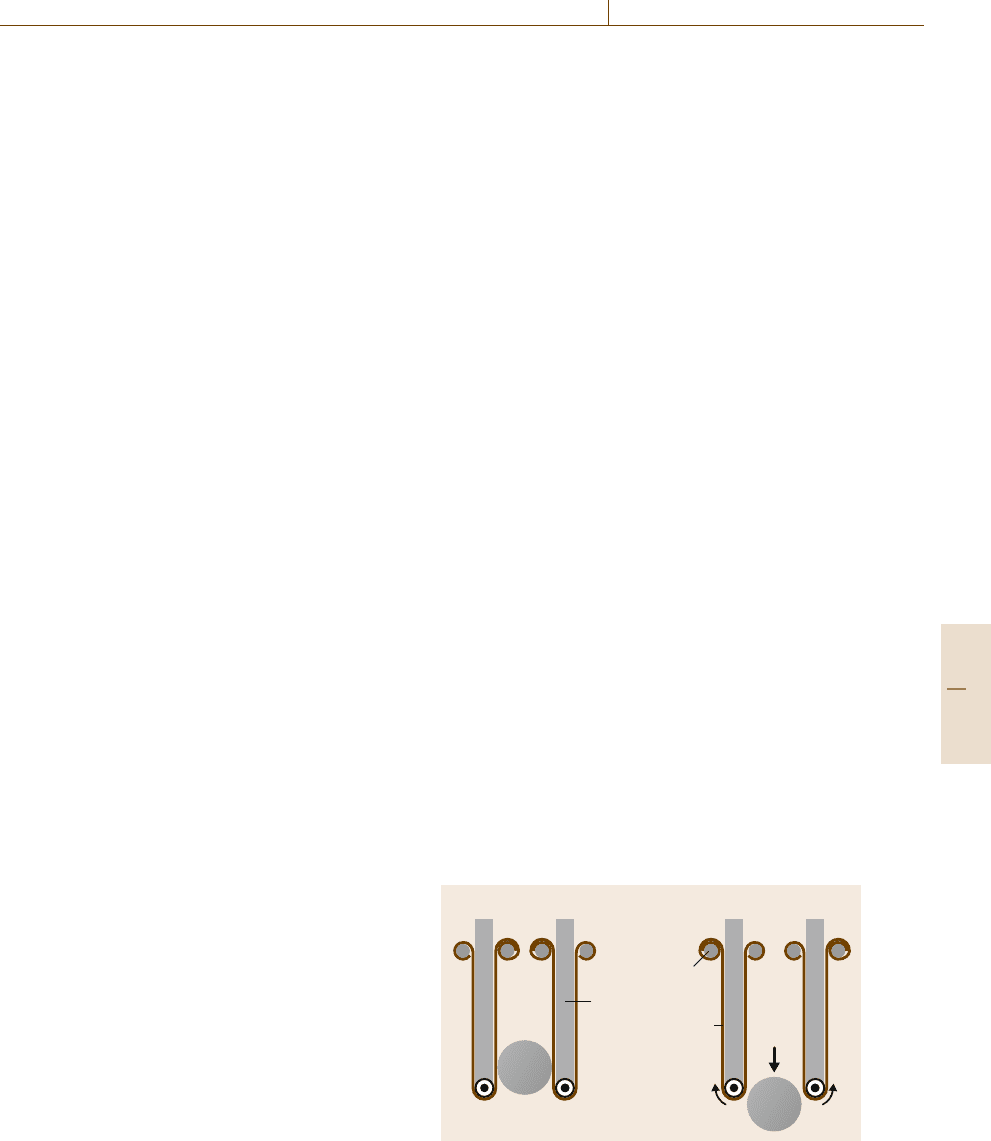
Another sticky product that has a reputation of be-
ing particularly difficult to handle is fresh sheets of
lasagne. Clamping-type end-effectors cannot be used as
Jaws
Spools
a) b)
Polyester
tape
Fig. 60.11a,b Parallel jaw gripper grasping (a) and releas-
ing
(b) a sticky object
Part F 60.4
1054 Part F Industrial Automation
Roller
Pasta
Conveyor
Blade
1.
1.
1.
2.
2.
3.
3.
4.
4.
2.
3.
v
c
v
r
ω
r
4.
a) b)
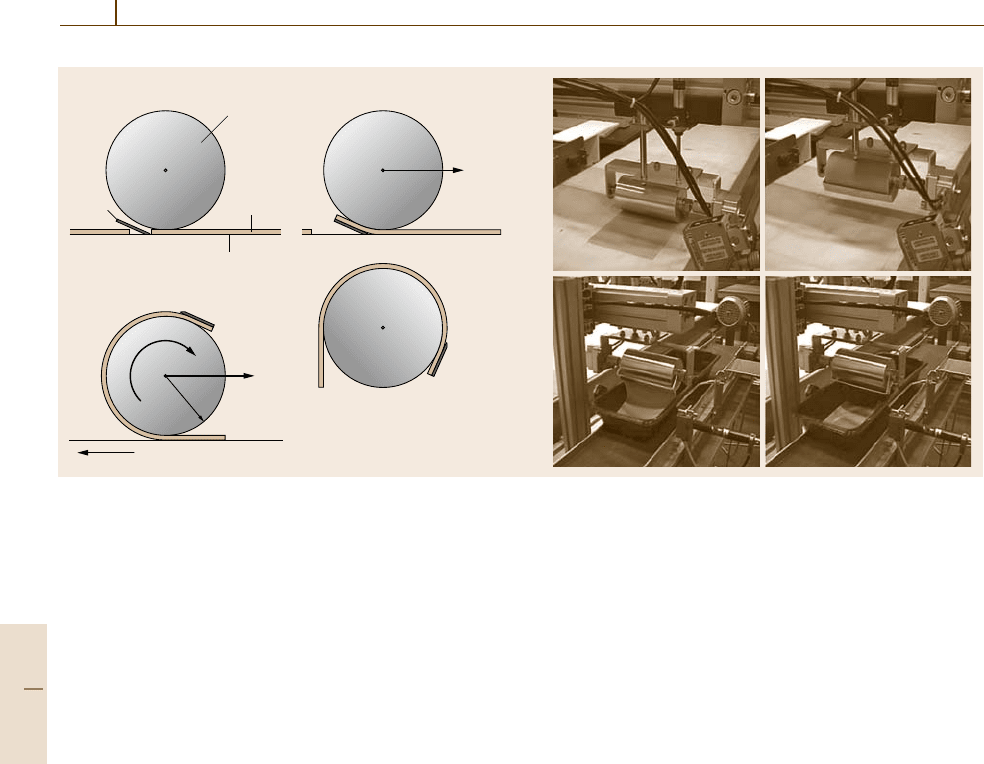
Fig. 60.12 (a) Lasagne lifting. (b) Motions in the automated handling of a lasagne pasta sheet
they would damage the surface of the pasta, and for
similar reasons vacuum cups are also unsuitable.
Moreno-Masey et al. investigated the possibility
of automating the manufacture of lasagne ready (mi-
crowave) meals and developed a method based on the
rolling action common in making pastry [60.24]. By
rolling a sheet of lasagne onto a roller and then grad-
ually unrolling it above a product it was shown that
the sheet could be positioned accurately and with lit-
tle damage. The conceptual design with the envisaged
sequence of operations is shown in Fig.60.12a, with the
automation system shown in Fig.60.12b.
The gripper is initially positioned so that the spat-
ula arm, needed to lift the front edge of the pasta, is
located close to the pasta sheet. The gripper then moves
horizontally a short distance towards the pasta, forcing
the spatula under the leading edge of the sheet. The
gripper continues moving in the horizontal direction
and simultaneously rotates the roller. By coordinating
the two motions the pasta is rolled onto the gripper
in a controlled manner. To release the pasta and de-
posit it into a tray the roller is simply rotated in the
opposite direction. The weight of the sheet causes the
lasagne to peel free of the roller in an equally con-
trolled manner. The machine constructed based on this
design is shown in Fig.60.12b. The motion of all actu-
ators are pneumatically powered with PLC control over
the joints using input sensing on the position of the
lasagne sheets. The machine is sufficiently simple and
low cost that nine identical machines could be used to
produce ready meals at a typical production rate of 60
per minute.
60.5 Decorative Product Finishing
Many food products include components or features
which add nothing to the taste or quality of the prod-
uct but are purely decorative. Cake manufacture is an
example of a production process where the product’s
appearance is as (perhaps even more) important as its
flavor. There are many decorative features used, rang-
ing from discrete components which are place on the
surface of the cake to intricate patterns or text produced
using icing.
Park Cakes in the UK is a large bakery produc-
ing cakes for special occasions which often include
hand-written messages on their upper surface such as
“Happy Birthday” or “Congratulations”. These mes-
sages are produced by skilled staff using icing-filled
pastry bags. The operators apply pressure to the bags
in order to produce a constant flow of icing with which
to write the messages. In order to be able to undertake
this task to the required high standard requires both ex-
Part F 60.5