Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Construction Automation 61.6 Application Examples 1075
giving the design team and the owner real-time cost
data. The use of DProfiler instead of manual-based es-
timating resulted in a 92% reduction of time used to
develop the estimate.
The team developed an initial concept design and
created a model in DProfiler with links to cost informa-
tion. The model took into consideration regional cost
factors, building type, and other components using tem-
plates that have been developed with experience from
similar projects. As the team constructed the building
mass, the cost data was updated in real time. Then, as
all components and assemblies were associated to cost
in a database, when the team included more details the
cost was automatically updated. In addition to linking
components or assemblies to the cost database, DPro-
filer also allowed the creation of relationships and rules;
for instance, it included one specific component that
was not part of the model. In this way, as the model was
developed, real-time information linked to the database
was presented. The team also used DProfiler to run
different scenarios and make informed decisions on
floor-to-floor height, square footage, location of com-
ponents, etc.
The team realized several benefits after using BIM
to aid the conceptual estimate process. They found a re-
duction of labor hours to produce an estimate. DProfiler
avoided the take-off process and also had an automatic
link to commercial cost databases. The design team was
able to produce an accurate estimate in real time, re-
ducing the time spent in verifying the accuracy of the
estimate, thereby spending more time in the financial
analysis of the different options. Also, a visual represen-
tation ofthe estimatewas created, reducing the potential
for errors.
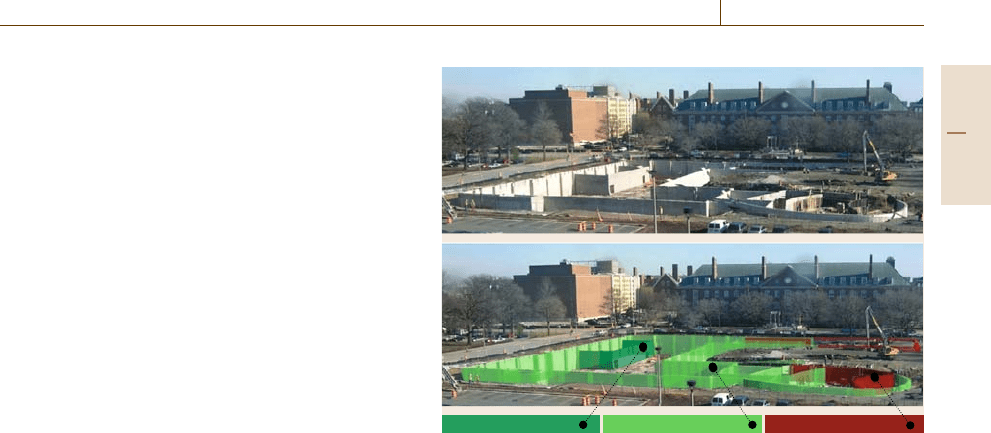
61.6.4 Construction Progress Monitoring
Automation
This example illustrates a method of automated
progress monitoring; the inputs are the as-planned 4-D
model and a sequence of on-site time-lapse photographs
that represent the as-built model. The objective of this
method is to automatically overlay the as-built images
with the as-planned model to determine and update the
progress status. It consists of putting the real-world
camera into the 4-D model; then, the image taken of the
On schedule Behind scheduleAhead of schedule
Fig. 61.6 Site photograph, superimposed photograph, and color
coding [61.59]
4-D model is overlaid with the site photograph taken
at the same time. The 4-D photograph displays the ex-
pected progress; therefore, superimposition of images
allows comparison of discrepancies between what was
intended and what was performed [61.59]. The method
uses earnedvalue analysis to present progress indicators
and uses a color code to provide a visual representation,
where a dark red colorrepresents objects that are behind
schedule/cost and dark green represents objects that are
ahead of schedule, as shown in Fig.61.6.
Future trends in this domain include implement-
ing combined progress tracking method that consists
of generating a BIM model of the project that contains
3-D geometry, schedule, and cost information with the
as-planned data. An as-built model is then generated
using the combination of two automated data collec-
tion technologies: machine vision and Wi-Fi.Togather
real-time object information, that information can be
translated using an IFC language to generate a 4-D
model with cost information on demand. Both models
can be superimposed, detecting graphically in real-time
the objects that are on time, the objects that are behind
schedule, and the objects that are ahead of schedule. In
addition, this application will allow the calculation of
earned value indicators with the information stored in
both models.
Part G 61.6

1076 Part G Infrastructure and Service Automation
61.7 Conclusions and Challenges
The cyclical nature of the construction industry, fea-
turing longer periods of reduced activity combined
with imminent shortages of skilled labor, increasing
quality expectations from costumers, tighter safety reg-
ulations, greater attention to computerized scheduling
and project control, and technological breakthroughs
led by equipment manufacturers, has once again put
construction automation on the map of researchers and
practitioners alike. In spite of challenges, such as cost,
lack of governmental incentives, regulatory barriers,
disbelief by the majority of the construction sector, or
the lack of research and development, much advance-
ment has been possible in construction automation in
the past three decades. Presently, the demand for ac-
curate, up-to-date, and timely information to manage
construction projects is growing, so automating the
construction management process presents enormous
benefits. It has been proven that the use of technolo-
gies, such as automated data collection: reduces the
time required to gather information at the job site; al-
lows the use of real-time information; decreases the
response time when corrective actions have to take
place, reducing the costs associated with late response;
and enhances the visualization and communication in-
teractions within the project team. In addition, the use of
BIM to support different project management processes
also presents several benefits. It enhances communi-
cation with and understanding of stakeholders, and
enables constructability decisions to be made during
the design phase and not only during construction. It
reduces the time spent in redesign and in answering re-
quests for information, and allows a better sense of the
time and the cost of the project, since estimates and the
schedule are more accurate and do not have delays or
overruns because of unexpected change orders.
However, there are still several technological gaps
that need further research and development. A signif-
icant drawback is the lack of major research in the
construction industry. The major challenges faced by
the industry in regard to construction management au-
tomation are: reduction of the technological gaps and
interoperability issues, the cost and availability of such
technologies, and the systematic education of construc-
tion practitioners on these subjects.
References
61.1 R. Tucker: High payoff areas for automation ap-
plications, Proc. 5th Int. Symp. Robotics Constr.,
Tokyo 1988 (Japan Industrial Robot Association,
Tokyo 1988)
61.2 B. Uwakweh: A framework for the management
of construction robotics and automation, Proc. 7th
Int. Symp. Robotics Constr., Bristol 1990 (Bristol
Polytechnic, Bristol 1990)
61.3 J. Hsiao: A Comparison of Construction Automa-
tion in Major Constraints and Potential Techniques
for Automation in the United States, Japan, and
Taiwan. M.Sc. Thesis (MIT, Boston 1994)
61.4 M.J. Skibniewski: Robotics in Civil Engineering (Van
Nostrand Reinhold, Southampton, Boston, New
York 1988)
61.5 R. Kangari: Advanced robotics in civil engineering
and construction, Proc. 5th Int. Conf. Adv. Robotics,
Pisa 1991 (Institute of Electrical and Electronics En-
gineers, Los Alamitos 1991)
61.6 R.Best,G.deValence(Eds.):Design and Construc-
tion:BuildinginValue(Butterworth Heinemann,
London 2002)
61.7 L. Cousineau, N. Miura: Construction Robots: The
Search for New Building Technology in Japan (ASCE,
Reston 1998)
61.8 D. Cobb: Integrating automation into construction
to achieve performance enhancements, Proc. CIB
World Build. Congr., Wellington 2001 (International
Council for Research and Innovation in Building
and Construction, Rotterdam 2001)
61.9 M. Lehto, G. Salvendy: Models of accident causa-
tion and their application: review and reappraisal,
J. Eng. Technol. Manag. 8, 173–205 (1991)
61.10 D. Castro-Lacouture, J. Irizarry, C.A. Arboleda: Ul-
tra wideband positioning system and method for
safety improvement in building construction sites,
Proc. ASCE/CIB Constr. Res. Congr., Grand Bahama
Island 2007 (American Society of Civil Engineers,
Reston 2007)
61.11 Bureau of Labor Statistics – BLS: Census of Fatal
Occupational Injuries – 2006 (BLS, Washington DC
2007), http://www.bls.gov/iif/oshcfoi1.htm#2006
(last accessed Dec 7, 2007)
61.12 T.S. Abdelhamid, J.G. Everett: Identifying root
causes of construction accidents, ASCE J. Constr.
Eng. Manag. 126(1), 52–60 (2000)
61.13 J.J. Adrian: Construction Productivity Improvement
(Elsevier, Amsterdam 1987)
61.14 C.H. Oglesby, H.W. Parker, G.A. Howell: Productiv-
ity Improvement in Construction (McGraw Hill, New
York 1989)
61.15 D. Crosthwaite: The global construction model:
a cross-sectional analysis, Constr. Manag. Econ. 18,
619–627 (2000)
Part G 61
Construction Automation References 1077
61.16 J. Lopes, L. Ruddock, L. Ribeiro: Investment in
constructionandeconomicgrowthindeveloping
countries, Build. Res. Inf. 30(3), 152–159 (2002)
61.17 K.W. Chau: Estimating industry-level productivity
trends in the building industry from building cost
and price data, Constr. Manag. Econ. 11,370–83
(1993)
61.18 D.W. Halpin: Construction Management, 3rd edn.
(Wiley, Hoboken 2006)
61.19 C. Peterson: A Methodology for Identifying Au-
tomation Opportunities in Industrial Construction.
M.Sc. Thesis (University of Texas at Austin, Austin
1990)
61.20 R.W. Nielsen: Construction field operations and
automated equipment, Autom. Constr. 1,35–46
(1992)
61.21 J.G. Everett, A.H. Slocum: CRANIUM: device for
improving crane safety and productivity, ASCE J.
Constr. Eng. Manag. 119(1), 1–17 (1994)
61.22 C. Balaguer: Open issues and future possibilities
in the EU construction automation, Proc. 17th Int.
Symp. Robotics Constr., Taipei 2000 (National Tai-
wan University, Taipei 2000)
61.23 C. Haas, K. Saidi: Construction automation in North
America, Proc. 22nd Int. Symp. Robotics Constr.,
Ferrara 2005 (University of Ferrara, Ferrara 2005)
61.24 R.D. Schraft, G. Schmierer: Service Robots: Prod-
ucts, Scenarios, Visions (A.K. Peters, Natick 2000)
61.25 F. Peyret, J. Jurasz, A. Carrel, E. Zekri, B. Gorham:
The computer integrated road construction project,
Autom. Constr. 9, 447–461 (2000)
61.26 Gomaco: Slipform Pavers (Gomaco Corporation, Ida
Grove 2008), http://www.gomaco.com/Resources/
pavers.htm(last accessed Feb 27, 2008)
61.27 Q. Ha, M. Santos, Q. Nguyen, D. Rye, H. Durrant-
Whyte: Robotic excavation in construction au-
tomation, IEEE Robotics Autom. Mag. 9(1), 20–28
(2002)
61.28 D.W. Seward: Control and Instrumentation
Research Group (Lancaster University, Lan-
caster 2008), http://www.engineering.lancs.ac.uk/
REGROUPS/ci/Files/projects/derek.html (last accessed
Feb 27, 2008)
61.29 L.E. Bernold: Control schemes for tele-robotic pipe
installation, Autom. Constr. 16,518–524(2007)
61.30 C. Maynard, R.L. Williams, P. Bosscher, L.S. Bryson,
D. Castro-Lacouture: Autonomous robot for pave-
ment construction in challenging environments,
Proc. 10th ASCE Int. Conf. Eng. Constr. Oper. Chall.
Environ., League City/Houston 2006 (American So-
ciety of Civil Engineers, Reston 2006)
61.31 D. Castro-Lacouture, L.S. Bryson, C. Maynard,
R.L. Williams, P. Bosscher: Concrete paving produc-
tivity improvement using a multi-task autonomous
robot, Proc. 24th Int. Symp. Robotics Constr., Cochi
2007 (Indian Institute of Technology, Madras 2007)
61.32 L.E. Bernold: Motion and path control for robotic
excavation, J. Aerosp. Eng. 6(1), 1–18 (1993)
61.33 D.V. Bradley, D.W. Seward: The development, con-
trol and operation of an autonomous robotic
excavator, J. Intell. Robotics Syst. 21, 73–97 (1998)
61.34 Shimizu: SMART System (Shimizu Corporation,
Tokyo 2008), http://www.shimz.com.sg/techserv/
tech_con1.html (last accessed Feb 27, 2008)
61.35 Obayashi: Appearance of Big Canopy (Obayashi
Corporation, Osaka 2005),
http://www.thaiobayashi.co.th/images/obacorp/
technology_automate/1n.jpg (last accessed Feb 27,
2008)
61.36 Obayashi: ABCS Construction Scene (Obayashi Cor-
poration, Osaka 2005), http://www.thaiobayashi.
co.th/images/obacorp/technology_automate/
5n.jpg(last accessed Feb 27, 2008)
61.37 M. Handa, Y. Hasegawa, H. Matsuda, K. Tamaki,
S. Kojima, K. Matsueda, T. Takakuwa, T. Onoda:
Development of interior finishing unit assembly
system with robot: WASCOR IV research project re-
port, Autom. Constr. 5(1), 31–38 (1996)
61.38 C. Eastman, P. Teicholz, R. Sacks, K. Liston: BIM
Handbook: A Guide to Building Information Mod-
eling for Owners, Managers, Designers, Engineers
and Contractors (Wiley, Hoboken 2008)
61.39 A. Kaklauskas, E.K. Zavadskas, S. Raslanas: Mul-
tivariant design and multiple criteria analysis of
building refurbishments, Eng. Build. 37,361–372
(2005)
61.40 Y. Lee, J.D. Gilleard: Collaborative design: a pro-
cess model for refurbishment, Autom. Constr. 11(5),
535–544 (2002)
61.41 J. Tulke, J. Hanff: 4-D construction sequence plan-
ning – new process and data model, Proc. CIB-W78
24th Int. Conf. Inf. Technol. Constr., Maribor 2007
(Int. Council for Research and Innovation in Build-
ing and Construction, Rotterdam 2007)
61.42 R. Navon: Research in automated measurement
of project performance indicators, Autom. Constr.
16(7), 176–188 (2006)
61.43 E. Jaselskis, T. El-Misalami: Implementing radio
frequency identification in the construction pro-
cess, ASCE J. Constr. Eng. Manag. 129(6), 680–688
(2003)
61.44 S. Kang, D. Tesar: Indoor GPS metrology system
with 3-D probe for precision applications, Proc.
ASME IMECE Int. Mech. Eng. Congr., Anaheim 2004
(American Society of Mechanical Engineers, New
York 2004)
61.45 G. Cheok, W.C. Stone, R. Lipman, C. Witzgall: Ladars
for construction assessment and update, Autom.
Constr. 9, 463–477 (2000)
61.46 C. Caldas, D. Grau, C. Haas: Using global positioning
systems to improve materials locating processes
on industrial projects, ASCE J. Constr. Eng. Manag.
132(7), 741–749 (2004)
61.47 E. Jaselskis, Z. Gao, R.C. Walters: Improving trans-
portation projects using laser scanning, ASCE J.
Constr. Eng. Manag. 131(3), 377–384 (2005)
Part G 61
1078 Part G Infrastructure and Service Automation
61.48 H. Sternberg, T. Kersten, I. Jahn, R. Kinzel: Ter-
restrial 3-D laser scanning – data acquisition and
object modelling for industrial as-built documen-
tation and architectural applications, Proc. 20th
ISPRS Congress, Istanbul 2004 (International Society
for Photogrammetry and Remote Sensing, Istanbul
2004)
61.49 M. B
¨
ohms, C. Lima, G. Storer, J. Wix: Framework
forfutureconstructionICT,Int.J.Des.Sci.Technol.
11(2), 153–162 (2004)
61.50 R.J. Fontana, E. Richley, J. Barney: Commercializa-
tion of an ultra wideband precision asset location
system, Proc. IEEE Conf. Ultra Wideband Syst.
Technol., Reston 2003 (Institute of Electrical and
Electronics Engineers, Los Alamitos 2003)
61.51 D. Castro-Lacouture, L.S. Bryson, J. Gonzalez-
Joaqui: Real-time positioning network for intel-
ligent construction, Proc. Int. Conf. Comput. Decis.
Mak. Civ. Build. Eng., Montreal 2006 (International
Society for Computing in Civil and Building Engi-
neering, Montreal 2006)
61.52 Z. Zhu, I. Brilakis: Comparison of civil infrastructure
optical-based spatial data acquisition techniques,
Proc.ASCEComput.Civ.Eng.,Pittsburgh2007
(American Society of Civil Engineers, 2007)
61.53 D. Castro-Lacouture, M. Skibniewski: Implement-
ing a B2B e-Work system to the approval process of
rebar design and estimation, ASCE J. Comput. Civ.
Eng. 20(1), 28–37 (2006)
61.54 D. Castro-Lacouture, M. Skibniewski: Imple-
mentation of e-Work models for the au-
tomation of construction materials management
systems, Prod. Plan. Control 14(8), 789–797
(2003)
61.55 S.Y. Nof: Models of e-Work, Proc. IFAC Symp.
on Manufacturing, Modelling, Management and
Control, Rio, Greece 2000 (Elsevier, Amsterdam
2000)
61.56 P. Anussornnitisarn, S.Y. Nof: e-Work: the chal-
lenge of the next generation ERP systems, Prod.
Plan. Control 14(8), 753–765 (2003)
61.57 B.Akinci,M.Fischer,R.Levitt,B.Carlson:For-
malization and automation of time-space conflict
analysis, ASCE J. Comput. Civ. Eng. 6(2), 124–135
(2002)
61.58 Caterpillar: ACCUGRADE GPS Grade Control System
(Caterpillar Inc, Peoria 2008), http://www.cat.com/
cda/layout?m=62100&x=7 (last accessed Feb 27,
2008)
61.59 M. Golparvar-Fard, F. Peña-Mora, C. Arboleda,
S.H. Lee: Visualization of construction progress
monitoring with 4-D simulation model overlaid
on time-lapsed photographs, ASCE J. Comput. Civil
Eng. (2009), Forthcoming
Part G 61
1079
The Smart Bui
62. The Smart Building
Timothy I. Salsbury
Buildings account for a large fraction of global en-
ergy use and have a correspondingly significant
impact on the environment. Buildings are also
ubiquitous in virtually every aspect of our lives
from where we work, live, learn, govern, heal,
and worship, to where we play. The application of
control and automation to buildings can lead to
significant energy savings, improved health and
safety of occupants, and enhance life quality. The
aim of this chapter is to describe what makes
buildings smart, provide examples of common
control strategies, and highlight emerging trends
and open challenges. Today, the most prevalent
use of automation in buildings is in heating, ven-
tilating, and air-conditioning (HVAC) systems. This
chapter reviews common control and automation
methods for HVAC, but also describes how automa-
tion is being extended to other building processes.
The number of controllable and interconnected
systems is increasing in modern buildings and this
is creating new opportunities for the application of
automation to coordinate and manage operation.
However, the chapter draws attention to the
62.1 Background .........................................1079
62.1.1 What is a Smart Building? ........... 1081
62.1.2 Historical Perspectives ................ 1082
62.2 Application Examples............................1083
62.2.1 Control without Feedback ........... 1083
62.2.2 Feedback Control ....................... 1083
62.2.3 Energy Management Control
Strategies.................................. 1085
62.2.4 Performance Monitoring and
Alarms ...................................... 1087
62.3 Emerging Trends ..................................1088
62.4 Open Challenges...................................1090
62.5 Conclusions ..........................................1092
References ..................................................1092
fact that the buildings industry is very large,
fragmented, and cost-oriented, with significant
economic and technical barriers that can, in
some cases, impede the adoption and wide-scale
deployment of new automation technologies.
62.1 Background
The worldwide energy used to heat, cool, ventilate,
light, and deliver basic services to buildings was, on av-
erage, approximately 2.4TW(= 2.4×10
12
W) in 2004.
Afurther5.6TW was attributed to industrial plants,
with a large fraction of these housed in buildings such
as factories, power plants, and other manufacturing fa-
cilities [62.1]. In developed countries, buildings can be
responsible for as much as 50% of total energy use.
These dramatic statistics coupled with the fact that hu-
man beings spend most of their lives inside buildings
make this application of critical importance to the well-
being of our planet and its global population.
There are many different types of buildings, rang-
ing from simple places of shelter to highly complex
ecosystems that provide a range of specialized services
to support specific functions. One common purpose
of buildings is to create a modified environment that
is comfortable for occupants even when outside con-
ditions are unfavorable. Comfortable conditions are
maintained through the operation and coordination of
mechanical and electrical systems and through the con-
version of energy from one type to another. The control
of indoor environmental conditions is the most com-
mon and widely exploited application of automation
Part G 62
1080 Part G Infrastructure and Service Automation
technologies in buildings and will be the main focus
of this chapter. Factors that affect the indoor environ-
ment are air quality, temperature, and humidity, as well
as lighting, and safety from fire and security threats.
For a building to be smart it must have some form
of automatic control system. Building control systems
vary widely in complexity from simple mechanical
feedback mechanisms to a network of microprocessor-
based digital controllers [62.2]. At the latter end of the
spectrum, the network of controllers is often known as
the building automation system (BAS). A BAS needs to
interface with physicalsystems in order to effect desired
changes on the building, and the interfacing is usually
made through means of sensorsand actuators.Buildings
can contain many types of physical systems, the most
common of which are described in more detail below.
HVAC and Plumbing. In terms of energy, the most im-
portant systems in buildingsare those used to heat, cool,
and ventilate theindoor environment. These systems are
collectively known as the heating, ventilating, and air-
conditioning (HVAC) plant. The HVAC plant is used
to condition the psychrometric properties (temperature
and humidity) of the indoor environment as well as air
quality. HVAC systems range in complexity from sim-
ple residential units that may have only heating units to
advanced systems for high-performance buildings such
as clean roomsand chemicallaboratories [62.3].Plumb-
ing systems are closely associated with the HVAC plant
but are often handled by a different group of companies
and contractors on a building project. Plumbing serves
the HVAC systems with water supplies used for heat-
ing and cooling and also handles distribution of potable
and waste water. Plumbing and waste disposal systems
are critical elements in ensuring occupant health [62.4].
Automatic control is widely used in HVAC systems
and ranges from simple feedback loops to complex
sequences of operation that manage scheduling and in-
teractions between systems.
Lighting Systems. Lighting systems are responsible for
a large fractionof building energy use,close to that used
by HVAC for the commercial sector. Most buildings
have both artificial and natural lighting and the interac-
tion between these sources is important in creating the
right level of illumination. In most buildings, both arti-
ficial and natural lighting are operated manually using
electric switches and window shades. However, auto-
mated lighting systems are available and are starting to
be used in modern buildings. For these systems, sen-
sors measure illumination levels in a space and also
whether a space is occupied and this information is used
to regulate artificial light levels and control shades on
windows.
Fire and Security. Fire systems are found in large build-
ings and include fire detection and alarming as well
as sprinkler systems for abatement. Security systems
are used to control access to buildings and internal
areas and trigger alarms when unauthorized access is
detected. Both of these systems are evolving rapidly
largely due to the availability of more advanced sen-
sor technology and imaging devices. The additional and
richer sensor information available from these systems
is creating new opportunities for intelligent responses
to particular situations. For example, having knowledge
of where people are located in the case of a fire can be
used to manage evacuation routes, improve emergency
response team planning, and also provide input to the
HVAC system to mitigate the spread of smoke.
Specialized Systems. Many buildings require special-
ist services to support specific tasks and functions. For
example, a hospital might require oxygen supply and
distribution and fume hoods for extracting dangerous
and toxic chemicals. In common with other building
services, these systems require piping or ducting for
containment and distribution, and pumps/fans, valves,
and dampers for fluid movement and control. Local-
ized power generation and combined heat and power
plants that use waste heat from electricity generation
to power heating and cooling systems are also found
in some buildings or campuses. These systems may in-
clude renewable sources of energy such as solar, wind,
and geothermal, and other power generation technolo-
gies such as fuel cells and microturbines. Specialized
systems, and in particular those that are packaged, often
have dedicated embedded controls, but in some cases
the BAS might be deployed to provide some higher-
level control and supervision.
Supporting Infrastructures. Modern buildings contain
systems powered by electricity and an increasing num-
ber powered by natural gas. Buildings therefore need to
have a distribution network for these energy supplies.
Key components include wiring, switch panels, circuit
breakers, transformers for electricity, and valves, pip-
ing, and various safety devices for gas. Another key
infrastructure in modern buildings is that associated
with information technology (IT). The IT infrastructure
in a building is usually considered to be separate from
the other systems mentioned so far because it is han-
Part G 62.1
The Smart Building 62.1 Background 1081
dled by a different group of companies outside of the
construction business. Similar to electricity distribution,
IT systems require wires, switch panels, and access
points in order to facilitate the transmission of both dig-
ital and analog data for devices such as computers and
telephones. Specialized cooling systems may also be
needed for high-powered computing devices and data
centers. Electricity, gas, and IT distribution systems in
a building will usually have some control elements, par-
ticularly for safety reasons.
The range of systems and processes in buildings is
clearly very broad and cannot be covered comprehen-
sively in the space available here. For this reason, this
chapter will focus more on the control and automation
aspects of a building rather on the systems that are under
control. The chapter will also concentrate on the soft-
ware and algorithmic aspects of control systems, which
are the source of the smartness in buildings, rather than
the hardware and supporting infrastructures. The out-
line of the chapter is as follows. The rest of this section
provides a discussion on what makes buildings smart
and concludes with a historical perspective of building
technologies. An overview of common control strate-
gies and their applications is presented in Sect.62.2,
followed by a discussion in Sect.62.3 on emerging
trends that are affecting the buildings industry. Sec-
tion 62.4 describes open challenges and, in particular,
business and technical barriers to the adoption of new
technologies. Finally, Sect. 62.5 draws conclusions and
reiterates some of the key points identified throughout
the chapter.
62.1.1 What is a Smart Building?
A building is made smart through the application
of intelligence or knowledge to automate the oper-
ation of building systems. In modern buildings, the
intelligence or smartness of building operation is en-
capsulated in algorithms, which are implemented in
software on microprocessor-based computing devices.
Many of these computing devices are part of the build-
ing automation system, which can be decomposed into
the following four main components:
•
User interface – allows exchange of information be-
tween a human operator and the computer system
•
Algorithms – methods or procedures for performing
certain tasks such as control and automation
•
Network – includes information transmission media
(e.g., wiring), routers, and appropriate encoders and
decoders for sharing information among devices
•
Sensors and actuators – these represent the inter-
faces between the computing systems and the plant.
The user interface, network, sensors, and actuators are
critical components of a BAS, but these are all en-
abling technologies that only provide the means by
which the intelligence inherent in the algorithms can
be applied. The algorithms fundamentally determine
the operational behavior of the controlled systems and
are the source of the smartness. In a typical building,
numerous objectives can be defined suitable for the ap-
plication of control methods. Examples are regulating
a room temperature to a set level, turning off systems
at a certain time, and controlling access to a room based
on information read by a card reader. Controlling a vari-
able, such as temperature, to a set level is probably
the most common control objective and is most often
carried out using feedback. Feedback is a fundamental
building block of control and automation and its ap-
plication in buildings will be discussed in more detail
in Sect.62.2.
Recent technological advances in information tech-
nology, including networking, computing power, and
sensor technology, have meant that the number of con-
trollable devices in buildings has proliferated. Not only
are there more devices to control, but information can
now be shared more easily between disparate systems.
Information is more easily accessible both within sys-
tem groups as well as across different groups. The
HVAC group of systems is particularly notable in mak-
ing information available to the BAS from multiple
types of subsystems including boilers, chillers, fans,
pumps, cooling towers, and measured by numerous
types of sensors. Opportunities abound within just the
HVAC group of systems for applying control strate-
gies that take advantage of the available data to improve
overall system performance.
The idea of combining information from different
systems to implement new and smart control and au-
tomation strategies extends easily to system groups that
traverse traditional boundaries. The example of com-
bining data from the fire and access control systems
to provide improved emergency response information
and also more effectively manage evacuation was cited
earlier. Another example is in utilizing access control
data to estimate the number of people in a building and
then using this estimate to operate the HVAC systems
more energy-efficiently. Although huge potential exists
for coordinated system operation, the reality today is
that the handling of interactions is limited and in most
cases ad hoc. However, despite the primitive nature of
Part G 62.1
1082 Part G Infrastructure and Service Automation
current automation strategies, the sharing of scheduling
databases and responses to alarms represents significant
progress toward smarter building operation.
Building operation is not the only way in which
buildings have been made smarter. The lifecycle of
a building includes its planning, design, construction,
installation and commissioning, operation, mainte-
nance, retrofit and remodeling, and destruction. Each of
these tasks not only consumes energy and resources, but
affects subsequent tasks. For example, a building will
only operate energy-efficiently if it has been correctly
designed and constructed. New and smart technologies
are being utilized at each stage in the lifecycle to im-
prove the overall process. A prime example is in being
able to simulate the performance of a design before it is
built [62.5]. This is a powerful technology that can lead
to cost and energy savings for a project. The ability to
simulate building systems is also enabling the develop-
ment of innovative algorithmic smart technologies such
as automated design and optimization [62.6].
It is also important to mention the significant en-
ergy and resources used during the construction phase
of a building. Energy is used at every step; from the
production of the building materials, to their trans-
port to site, through to the operation of machines for
excavation and assembly of the materials. The busi-
nesses devotedto this one phaseof the buildinglifecycle
are numerous, diverse, and employ various forms of
automation to enhance efficiency. The term smart is
frequently encountered in various construction tech-
nologies including prefabricated components, advanced
supply chain and project management, and on-site ma-
chinery, to name only a few examples. However, the
term smart buildings has come to mean smart operation
more than anything else, and for this reason the opera-
tion phase will be the focus of this chapter. The smart
operations, enabled by technological advances, guaran-
tees cost savings in construction and operations, and
improved functionality [62.7].
62.1.2 Historical Perspectives
Modification of the environmental conditions inside
buildings is not new, with records showing that the an-
cient Egyptians used aqueducts for cooling as long ago
as the second millennium BC [62.8]. Heating systems
were also used by the Romans in 100 AD in their north-
ern territories based on underfloor distribution of air
heated by furnaces [62.9]. From the perspective of the
building plant, evolution had been slow until the ad-
vent of commercially viable electrical air-conditioning
systems in the first decade of the 1900s. The ori-
gin of these systems can be traced to discoveries by
Michael Faraday in 1820 on how to create a cool-
ing effect by compressing and liquefying ammonia, but
it was the commercial success of the early electrical
air-conditioners that triggered a new interest in the in-
door environment and its control. Activity in this area
was probably at its height in the first half of the 20th
century. During this period, the field of heating, venti-
lating, and air-conditioning (HVAC)wouldhavebeen
considered a high-technology field that posed some
of the most interesting engineering challenges of the
time [62.10].
The application of automation technology to build-
ings has paralleled its application to other industries,
with the idea of feedback playing a central role. The
feedback concept is a fundamental element of automa-
tion and has a history of its own dating back to the
water clocks of the ancient Greeks and Arabs [62.11].
The Dutch inventor Cornelis Drebbel is credited as cre-
ating one of the first feedback temperature controllers
for a furnace in the early 1600s [62.12]. The first
thermostats for space temperature control using heat-
ing plant appeared in the late 1800s. The thermostat
feedback system is an implementation of an intelli-
gent human concept, or procedure, to solve the problem
of temperature regulation. These early applications of
automation thus led to the creation of the first smart
buildings. Implementation of feedback and other con-
trol methodsoriginally used mechanical transmission of
information, such as pneumatics. These systems were
replaced by electrical devices with controllers first be-
ing implemented using analog circuits. Today, most
analog controllers have given way to digital devices
where earlier feedback strategies are now implemented
as algorithms in software.
The feedback concept has remained central in build-
ing automation. It is the most common type of control
strategy and is used to control everything from air-
conditioning to lighting to fire and security to toilet
flushing. Although the common room thermostat prin-
ciple is still widely used, building automation systems
now encompass an evermore sophisticated array of
control algorithms that not only provide regulation
of individual variables to setpoints, but also provide
high-level coordination and management of building
assets.
Part G 62.1
The Smart Building 62.2 Application Examples 1083
62.2 Application Examples
Possibly excepting certain types of chain stores, every
building is different, having a unique mix of structure,
geometry, orientation, location, number of people, and
types of building plant. The control and automation sys-
tems mirror this bespoke nature and are usually specific
to each particular building. Finding common elements
of control logic that run across all building types is
therefore a challenge. This problem is particularly ex-
acerbated at the higher levels of control logic hierarchy
that are used to coordinate the operation of different
systems. The aim of this section is to identify and re-
view a sample of control strategies that are generic and
found in buildings of different types. Although these
strategies are outnumbered in practice by ad hoc and
rule-based logic, they usually have a better scientific
basis and are more easily adapted and scaled across
different buildings.
62.2.1 Control without Feedback
A very simple and yet effective form of building au-
tomation is to operate systems based on a time clock;
for example, a heater in a building could be turned on
at a certain time every day and turned off at another
time. These times can be determined from some ex-
pected behavior that is known to be linked to time, such
as people coming in to work, or even the sun rising and
setting. This kind of control logic can be used to con-
trol everything from building access, lights, and HVAC.
Time-based control is also a type of event-triggered
logic where the event being monitored is time of day.
The strategy does not contain feedback because time is
unaffected by the action of the systems being operated.
Time-based operational scheduling is commonplace in
modern buildings as an overriding or supervisory logic
even when more advanced control and building man-
agement strategies are employed. The logic is usually
implemented as rules such as: IF TIME = 9.00AM
TURN ON CHILLER; IF TIME = 5.00PM TURN OFF
CHILLER.
Closed-loop control is synonymous with feedback
control. Open loop refers to the case where no infor-
mation associated with the controlled variable is used
in deciding how to adjust the manipulated variable; the
loop is thus open. In the HVAC industry, reference is
sometimes made to open-loop operation. In most cases
this involves having an operator make adjustments to
a manipulated variable manually. However, if the oper-
ator is making adjustments in response to observations
of the controlled variable, this is not truly open loop
because the operator is providing the feedback mech-
anism. An example of this is when a room in a building
has a heating device that can be either on or off but only
activated by a human operator. When the room is too
cold the person will turn on the heater and when it is too
hot they will turn it off. Manual operation of this sort is
common in buildings and may be carried out by a ded-
icated building operator who oversees plant operation.
In many situations, preexisting automated feedback sys-
tems may be overridden by the operator because of
lack of confidence or trust. The operator then manu-
ally adjusts things such as control valves and dampers
to maintain comfort conditions.
62.2.2 Feedback Control
Single Loop
Feedback control is the most widely used automation
concept in buildings, with the temperature thermostat
being the vanguard of this strategy. Early examples of
these devices were based on pneumaticsand mechanical
transmission of information [62.13]. Modern buildings
use thermostats that contain a temperature sensor and
a small integrated circuit that determines when the tem-
perature is outside an acceptable range. The thermostat
triggers a switch to operate a device which is then
expected to bring the temperature back into its accept-
able range. Thermostatic temperature devices usually
require specification of a setpoint and a control band.
A device would be switched either on or off whenever
the measured temperature was outside of the control
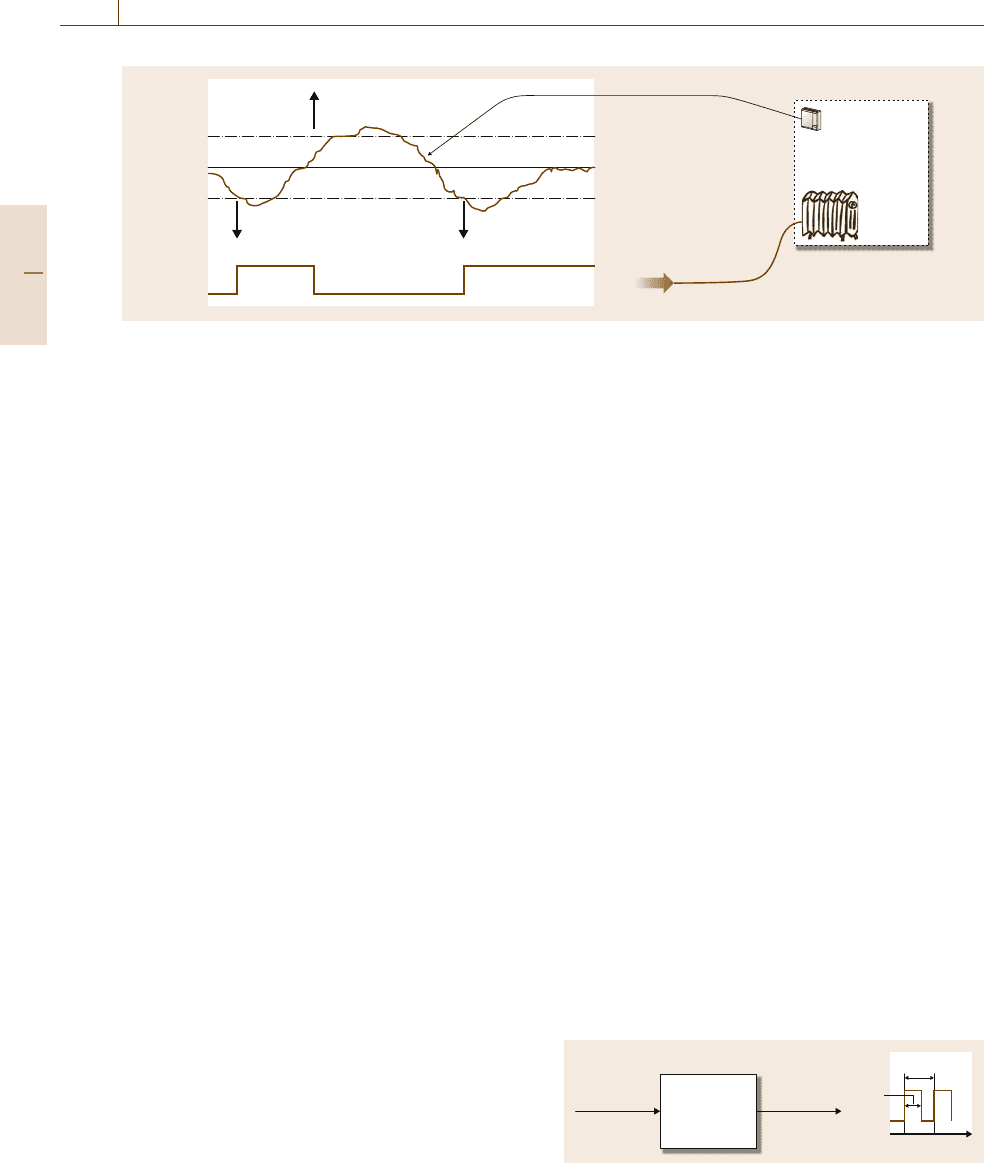
band, which surrounds the setpoint. Figure 62.1 shows
an example thermostatic control strategy for a heater
in a room with a setpoint of 20
◦
C and a control band
of 1
◦
C. There is a trade-off between the closeness of
control, determined by the control band, and the wear
and tear on the equipment resulting from cycling be-
tween on and off states. Some equipment types may
also have constraints on how long they can remain
in an on or off state and these are called minimum
on and off times. The maximum cycle frequency is
the reciprocal of the sum of the minimum on and off
times.
Thermostatic control is an example of single-loop
feedback control where the controller is a switch or
relay-type device that has infinite gain. Theswitching of
the controlled device causes oscillations to occur in the
controlled variable around its setpoint. These oscilla-
Part G 62.2
1084 Part G Infrastructure and Service Automation
Control actions (On/Off)
Room
Measurements
Off
20.5°C
19.5°C
Setpoint = 20°C
On
Off
On On
Fig. 62.1 Thermostatic temperature control of a heater
tions areusually undesirable,especially if the amplitude
is large due to minimum on and off times being large
relative to the dominant time constant of the controlled
device.One wayto avoidoscillations isto usea physical
device whose output can be modulated. Instead of being
only on or off, the device output can be modulated by
manipulating an input between 0 and 100% of its range.
Having a manipulated variable that can be varied opens
the way forfinite-gain controllersto be usedin feedback
loops. Modulated systems make up about two-thirds of
controlled devices in buildings, with switched systems
representing the other third.
Proportional, integral, and derivative (PID) action
controllers are the most common type of finite-gain
controllers used in building feedback loops. These
controllers modulate the input to the controlled de-
vice based on the difference between the setpoint and
the controlled variable, and the theory behind the al-
gorithm is well established [62.14]. Proportional-only
(P) controllers are still common in buildings where
control exactly to setpoint is not critical. As is well
known, these controllers yield a steady-state offset from
setpoint and, when this is not desirable, proportional–
integral (PI) controllers are used. This complexity of
feedback control works well for most building control
loops that are dominated by one time constant.The inte-
gral action of the controller ensures that the error signal
can be maintained at zero and propertuning allows good
control without oscillations for most loops. Adding the
derivate action can yield better results for common ap-
plications such as room temperature control, but the
drawback is that tuning is more difficult.
PI(D) controllers can also be used in buildings to
control switched devices. This is achieved by using an
element in the control loop that converts the output sig-
nal from the controller (usually between 0 and 100%)
to a pulse train (either 0 or 1). Pulse-width-modulation
(PWM) logic can be used to provide this conversion,
as illustrated in Fig.62.2. PWM and other variants have
been appliedto HVAC systemapplications withpromis-
ing results [62.15].
Although the PI algorithm is well established and
almost ubiquitously deployed for building control, it
has been recognized for some time that control perfor-
mance is often poor in practice. One reason for this is
that many plant items in buildings are nonlinear. When
a PI controller is used to control a nonlinear system, its
performance will vary with operating point. In severe
cases, the control might be too aggressive, causing os-
cillations at one point and yet be too slow at another.
These kinds of performance problems can jeopardize
comfort and energy use and also wear out equipment.
There are several methods for counteracting nonlin-
earity that are used in nonbuilding applications, such
as gain scheduling and model-based control [62.16].
The research community has investigated using some
of these methods in buildings including generalized
minimum-variance control [62.17] and model-based
control [62.18]. However, the industry has been reluc-
tant to adopt these methods because of the extra time
(and money) required for setup and tuning. More suc-
cessful approaches in the building industry have been
those that are self-tuning or automatically adaptive to
changes; examples include neural networks [62.19]and
pattern-recognition adaptive control [62.20]. The lat-
ter method of Seem has been commercialized and is
PWM
algorithm
Analog
input
Pulse
train
Cycle
Time
On
time
Fig. 62.2 PWM conversion of analog to switched signal
Part G 62.2