Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.


Material Handling Automation in Production and Warehouse Systems 55.2 System Architecture 965
tem (WMS), and enterprise resource planning (ERP)
system. The WMS can be substituted by the MMS
if the warehouse is composed of relatively simple
systems.
Understanding high-level decision-support systems
in SCM helps to understand the scope of control
tasks performed by the IAMHS. The advanced plan-
ning and scheduling (APS) system generally consists
of planning and scheduling modules. Sometimes the
scheduling module is again broken down into schedul-
ing and dispatching modules (SDS in Fig.55.3). The
ERP system generally includes the planning module;
however, the scheduling and dispatching modules can
be included in any other systems such as the MES and
WMS.InFig.55.3, it is assumed that the modules are
running in a stand-alone system called the SDS that
communicates with the ERP system, MES,andMMS.
The planning module makes a long-term production or
procurement plan based on customer orders, demand
forecasting results, and capacity constraints. Its time
horizon varies from weeks to months. Practically, it
hardly optimizes complex factors of resources on the
shop floor because of the long computation time, but
constructs highly aggregated planning. Its results in-
clude production quantities for each product type and
time bucket, or production due dates for each product
type or product group. Detailed resource requirement
plans are not specified by the planning module due to
the uncertainties and complexities of operations. The
scheduling module is responsible for delineating more
concrete plans for the shop floor to meet the target pro-
duction plan from the planning module. It typically tries
to optimize various resource constraints with several
objectives such as due-date satisfaction and through-
put maximization. Detailed resource requirement plans
over time buckets within a time horizon are created by
the scheduling module. It sometimes takes into account
constraints in the AMHS for more robust scheduling.
The time horizon of the scheduling module varies from
a few hours to days. Thedispatching moduledetermines
the best unit load for a machine in real time following
a trigger event from the machine or unit load. It tries
to follow up closely the scheduling results, which are
globally optimized. The MMS in the IAMHS receives
transfer commands from either the scheduling module
or dispatching module based on its system architec-
ture. These transfer commands are the result of the
scheduling, machine assignment or job sequencing on
processing machines. The MMS manages the process
of the given transfer command by creating more de-
tailed transfer commands to the AMSHs in the IAMHS.
The dispatching module is sometimes included in the
MMS, and creates the transfer commands based on the
scheduling results and its own dispatching rules for the
real-time status of the shop floor. The IAMHS takes
charge of the final execution of the SCM in an enter-
prise and also provides useful information as described
above.
The higher-level systems of the IAMHS auto-
mate information processing throughout an enterprise.
The MES in Fig.55.3 is a tracking system that col-
lects important data from processing machines and
stores them in well-structured database tables for ana-
lysis of quality and process controls; however, it has
expanded its role into many other areas based on
a powerful open architecture. It has been popularly
used in the electronic industry such as in semicon-
ductor fabs and surface-mounting technology (SMT)
lines, and has recently spread into other industries.
The warehouse management system (WMS)isgen-
erally used in mid- or large-size warehouse facilities,
similar to MES for a production shop floor; it tracks
every movement of materials and support operations
for material handling in the warehouse. Its focus is on
information processing automation. The objective of
implementing an ERP system in a company is infor-
mation sharing for rapid and correct decision-making,
and implementation throughout the enterprise by us-
ing an integrated database system [55.12]. Chapter 90
provides a more thorough discussion of ERP and re-
lated concepts. The whole procedures of order entry,
production planning, material procurement, order de-
livery, and corresponding cash flow are managed by
the system. All the data from different applications in
an enterprise or between different enterprises are ex-
changed by an electronic data interchange (EDI) server,
which allows automated exchange of data between ap-
plications. Based on the EDI technology, applications
freely exchange purchase orders, invoices, advance ship
notices, and other business documents directly from
one business system to the other without human sup-
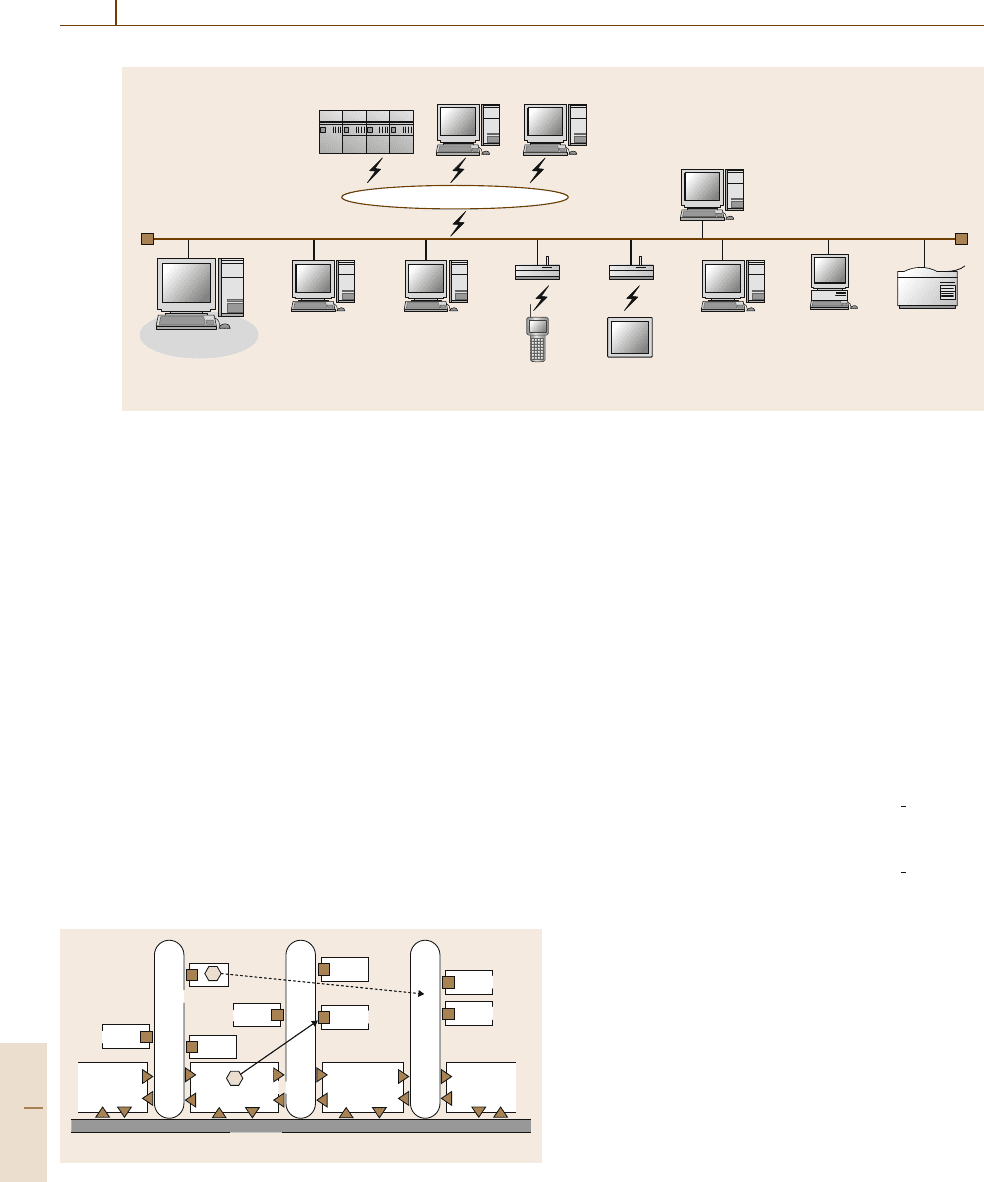
port. Figure 55.4 illustrates the connectivity of IAMHS
to other systems in SCM, which is used in an actual
industry.
55.2.1 Material Management System
The role of the MMS is very important in a complex
IAMHS for high-level automation. The main functions
of the MMS are summarized below, in increasing or-
der of importance. This summary does not discuss the
dispatching module that assigns unit loads to process-
Part F 55.2
966 Part F Industrial Automation
Production line
Genetic algorithm (GA)
palletizing system
Wireless
mobile phones
Wireless
in-vehicle terminals
Transport planning
support system
Vehicle dispatch
system
Logistics
data server
Wireless terminal
system
Terminals Printer
ERP
HOST
EDI
Fig. 55.4 Connectivity of IAMHS to other systems in SCM (courtesy of Murata Machinery)
ing machines because this involves so many topics;
however, the dispatching functions bounded to AMHSs
(i.e., dispatching unit loads while not considering pro-
cess machines) will be discussed here.
The roles of the MMS in a complex IAMHS are:
1. Determining thebest destination amongseveral pos-
sible AMHS alternatives
2. Determining the best route to get to the destination
from a source location via several AMHSs
3. Determining a proper priority for the transfer
command
4. Storing and reporting various data using a database
server
5. Transfer command management between different
AMHSs
6. Error detection and recovery for the transfer
command
7. Providing a user interface for control, monitoring,
and reporting.
Conveyor #1
Machine #9
Machine #8
AGVS #3
AS/RS #4
Machine #5
AGVS #2
AS/RS #3
Machine #4
Machine #2
Machine #1
AGVS #1
AS/RS #2
OP0201
OP0201
AS/RS #1
OP3
Fig. 55.5 Example of IAMHS
For a unit load to be transferred, its source and
destination locations are mainly determined by the dis-
patching or scheduling module; however, when the
candidate destinations are AMHSs, it is sometimes
more efficient for the MMS to determine the final des-
tination than for the scheduling or dispatching module
to do so. Consequently, the dispatching and scheduling
system provides a destination group to the MMS.Fig-
ure 55.5 illustrates the execution process of a transfer
command. In the figure, if a unit load from Machine #2
has just finished its processing and has to be trans-
ferred to an AS/RS to be processed next, on one of
the machines connected to AGVS #3 (dashed arrow in
the figure), there are two candidate AS/RSs connected
to AGVS #3: AS/RS #3 and AS/RS #4. The AS/RS
group connected to AGVS #3 is named AS
Group #3.
The MMS will receive a transfer command from the
dispatching module, specifying the source location as
Machine #2 and the final destination as AS
Group #3.
Since there are two alternative destinations, the MMS
may consider the product type of the unit load, the full
rate of each AS/RS, the load port status of each AS/RS,
the shortest distances from the unit load to the AS/RSs
considering current active jobs in each system, and so
on. It will determinethe bestAS/RS amongst thetwo al-
ternatives and trigger a transfer command to AGVS #1,
which will first move the load to AS/RS #1 from Ma-
chine #2.
The MMS is also responsible for determining
the destination subsystem in an AMHS, such as the
load/unload port (or pickup/drop-off port) in an AS/RS,
because there are generally multiple load/unload ports
with different types and numbers of buffers. The ports
Part F 55.2
Material Handling Automation in Production and Warehouse Systems 55.2 System Architecture 967
may differ, being load only, unload only or of unified
type. Assume that a unit load in AS/RS #2 in Fig.55.5
has to be moved to Machine #5, connected to AGVS #2
(solid arrow in Fig.55.5). First, the unit load has to be
moved to one of the output ports in the AS/RS. The
AS/RS controller may not know which output port will
be the best among the three possible ones in the figure
because it does not know the next destination of the unit
load. The MMS may determine a load port connected to
AGVS #2, OP0201 in Fig.55.5. In practical application,
the problems aregenerally muchmore complicatedthan
this illustration due to the increased instances in the sys-
tem. Few studies have addressed this type of problem.
Sun et al. [55.13]andJimenez et al. [55.14] stress the
importance of this problem in the literature and intro-
duce a few ideas being used in practical applications;
however, their methods leave much room for improve-
ment in that they use static approaches and consider
limited factors.
Obtaining the best route to get to the destination
is another important task of the MMS.Inacomplex
IAMHS, there are many possible routes consisting of
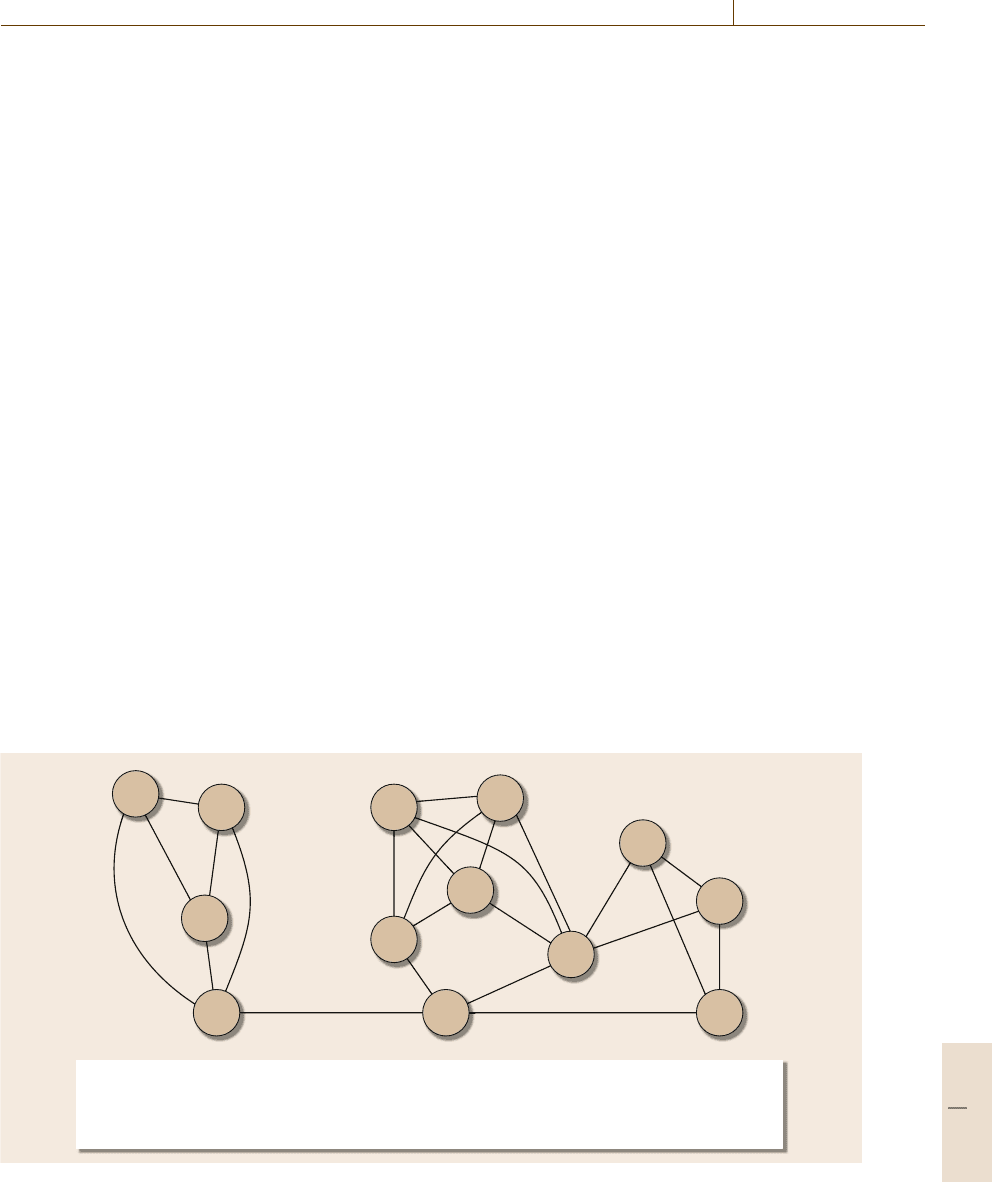
different AMHS types. The IAMHS in Fig. 55.5 is rep-
resented by the graph in Fig. 55.6. A graph can be
encoded in database tables by using an adjacency ma-
trix or incidence matrix for use by a computer program.
The adjacency matrix is a simple from–to chart be-
tween a pair of vertices, in which the value of an edge
is the distance between the vertex pair, being zero if
the pair are not connected. The incidence matrix rep-
AS
02
AS
03
M
02
M
02
M
03
M
03
M
04
M
01
CS
01
AS
01
AS
04
M
02
M
03
Naming convention of vertices in the graph:
Two-digit number in a vertex followed by alphabets represents the index number of machines or AMHS.
For example, M01 is the machine #1 connected to AGVS #1 and CS 01 is the conveyor #1. Acronyms are
as follows. M: Machine, AS: AS/RS, CS: Conveyor System
Fig. 55.6 Graphical representation of the IAMHS in Fig.55.5
resents the connectivity of vertices by edges. Using
a graphical representation of the IAMHS, many pre-
defined properties and algorithms of graph theory can
be applied to develop algorithms for the MMS;for
example, Dijkstra’s algorithm can be used to deter-
mine the shortest path from a source to destination
location.
The time intervals between the arrivals of transfer
commands are sometimes completely random in that
there are significant fluctuations in the number of ar-
rivals during different time periods. When the queue
size increases on AMHSs, use of different priorities for
transfer commands often providesa very useful solution
to improve overall system performance. It is reported
that a good priority algorithm can improve the through-
put of a production facility [55.15].
There are two types of tables in the database of
the MMS. One type of table stores parameters for con-
trol algorithms and status user interfaces (UIs). These
need a minimum number of entities to achieve a shorter
transaction time when they are queried. The other type
of table stores data for movement histories based on
communication messages between component systems
of the IAMHS. The accuracy of these historical data
have been significantly improved by material handling
automation with advanced information interface tech-
nology (IIT) by using RFID technology or barcode
systems. A large amount of information can be ex-
tracted from the historical data, including the standard
operating time of a machine, the processing routes of
Part F 55.2
968 Part F Industrial Automation
a unit load over machines in different process stages,
the lead time of the unit load from start to finish, etc.
These data provide useful information for var-
ious purposes. Most of all, without accurate data
from production and warehouse systems, it is hard to
achieve successful realization of the enterprise-level de-
cision support systems explained above. Good planning
strongly depends on accurate data. In practice, many
companieshaveinvestedinexpensiveERP systems ca-
pable of automated production planning for their shop
floors; however, many of them do not use the module
because of poor planning and scheduling quality from
the system. One of the main reasons for this poor quality
is sometimes due to the lack of good data from the ma-
terial handling system, which relies on manual jobs and
operator paperwork. Accurate data from AMHSs also
helps to achieve lean manufacturing on the shop floor
by providing precise measures. For a complicated shop
floor, it is often difficult to define a bottleneck stage or
performance measures ofthe bottleneckmachines. Lean
manufacturing starts from well-defined and accurate
performance measures. Many details of the machines
can be analyzed by data relating to material movements
from machine to machine, examples of which include
machine throughput, product lead time, and the work-
in-process (WIP) for each processing stage. Sometimes
they also provide benefits for engineering analysis for
the improvement of quality control. The performance
of the IAMHS can also be measured and improved by
using these historical data. A new algorithm under test
can be easily tracked to assess how it performs in an ac-
tual application. Since there are many data transactions,
summarized tables are sometimes used for long-term
analysis. Data-mining approaches are helpful in design-
ing these tables.
AS/RS #2 MMS AGVS #2 AS/RS #3
Move request #1
Pick-up report #1
Job completion report #2
Port status change request #2
Port status change request #3
Job completion report #3
Job assign report #1
Move request #2
Move request #3
Job completion report #1
Port status change #1
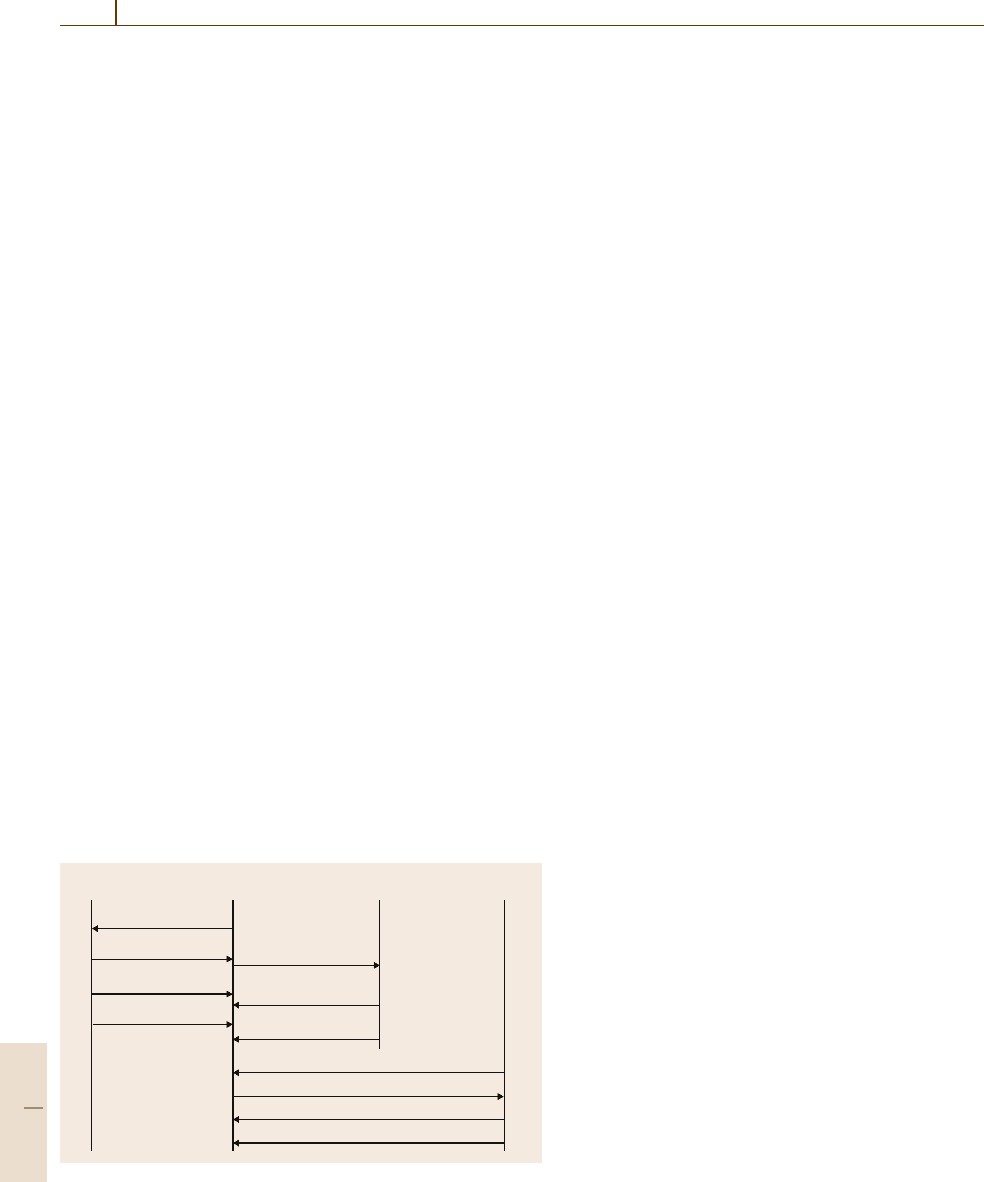
Fig. 55.7 Message sequence for a simple transfer command
Another important task of the MMS is the path
management function, which controls a sequence of
transportation jobs. Let us consider the following sim-
ple transfer request as an example. A transfer request
is sent to the MMS from the dispatching module to
move a unit load from a rack in AS/RS #2 to AS/RS #3
through AGVS #2 in Fig.55.5. Figure 55.7 shows
a message sequence illustrating communication be-
tween the MMS and AS/RS controllers involved in this
transfer, and between the MMS and AGV controller.
A few more messages might be used in actual systems.
As seen in the figure, although this is a relatively sim-
ple transferring task, more than 13 messages are used
to complete the task. First, transfer request #1 is trig-
gered by the MMS (it can be triggered by either the
dispatching module or a procedure of the MMS itself).
This request message transmits the source location as
AS/RS #2, the destination as the unload port of the
AS/RS, and the unit load identity to the AS/RS con-
troller #2. If there are other high-level systems such as
a WMS or MES,theMMS will send additional mes-
sages to these systems. In this case, the status of the
unit load possibly needs to be updated from Waiting to
Busy or Transferring for the WMS and MES.Tosend
this message to AS/RS controller #2, the MMS has to
make at least two major decisions: it has to select an
unload port among several idle ports, and to determine
to which among the many other AMHSs this message
should be sent. For the former decision, the closest idle
port to the next destination (i.e., AGVS #2) is selected
basedontheMMS algorithm. After receiving the trans-
fer request from the MMS, AS/RS controller #2 will put
the job into its queue, if it is performing other tasks. If it
is its turn, the controller will send the job assign report
to the MMS so that it triggers another transfer request
command toAGV controller #2.This transfercommand
could be sent later after the job completion message
from the AS/RS controller #2 has been received; how-
ever, by sending before the completion message, it can
synchronize the transfer activities of two systems and
thereby reduce the waiting time of the unit load for the
vehicle at the unload port of AS
/RS #2. The explanation
of the rest of the messages in the figure is omitted.
The MMS integrates not only systems but also
human operators in the system environment. A user
interface (UI) plays a major role in this integration. Op-
erators canmonitor thenumber of AMHSs using the UI.
Also, parameters to control an individual AMHS and
IAMHS are changed through the UI. Another important
function provided is reporting. Various reports can be
queried directly from the database of the MMS.
Part F 55.2
Material Handling Automation in Production and Warehouse Systems 55.3 Advanced Technologies 969
55.3 Advanced Technologies
This section surveys advanced technologies enabling
the IAMHS to achieve the high-level MHA. First, the
IIT utilizing wireless devices will be reviewed, then the
focus will move onto design and control issues of the
MHA. A wide range of methodologies across artificial
intelligence (AI) and operations research (OR) tech-
niques have been adopted to solve challengingproblems
in design and control of MHA. The design and control
issues with AMHS types will be briefly described in-
cluding different points of interest. The review focuses
on the technical issues of the MMS, which is the most
important element of the IAMHS. Finally, AI and OR
techniques are compared according to several criteria in
MHA.
55.3.1 Information Interface Technology
(IIT) with Wireless Technology
Benefits of wireless communication systems include
mobility, installation flexibility, and scalability. Ap-
plications of the wireless communication used for
MHA are radiofrequency identification (RFID), wire-
less local-area network (LAN) (i.e., Ethernet), and
wireless input/output (I/O). The wireless sensor net-
work has also great potential for many applications of
the MHA to collect data or form a closed-loop control
system.
Radiofrequency Identification (RFID)
RFID enhances information tracking with a wide va-
riety of applications for material handling [55.16]; for
example, it prevents loss of boxes and incorrect ship-
ping in a distribution center and reduces time for
reading tags in boxes or carriers on a manufactur-
ing shop floor. Its greatest advantages over barcode
systems are its long read range, flexibility of locat-
ing tags in boxes, multitasking for reading many tags
at the same time, and robustness against damage. Fi-
nally, RFID systems increase the accuracy of data from
material handling systems and reduce time for data
collection. With more reliable and faster information
tracking, more sequential operations can be automated
and integrated without affecting system performance
or requiring human interventions. It also enables the
development of higher-level MHA in production and
warehouse systems.
An RFID system consists of tags and readers. An
RFID tag has two components, a semiconductor chip
and antenna, and there are basically two types of RFID
tags, passive and active tags, based on the source of
the power. A passive tag does not have a battery and
is powered by the backscattered RF signal from the
reader, while an active tag has a battery and is there-
fore more reliable. Although the read range of a tag
depends strongly on its power level, antenna, and fre-
quency, and the environment in which it is used, an
active tag can have a range of up to 30m or more while
a passive tag can be read reliably over a few meters.
In between these two types, there is a semiactive tag
that is powered by RF from the reader and consumes
power from a battery while communicating with the
reader. The lifetime of the battery is about 7years or
more. Another classification of RFID tags is based on
the ability to write information to tags. Some tags are
classified as read-only and can be written only once
but read many times; these are generally passive tags.
Information can be written by both users and produc-
ers. There are also rewritable passive tags in which
the program can be rewritten by users. Most active
tags are rewritable. RFID readers send RF signals to
tags, receive signals from tags, and communicate with
a central system. Their functions varies from a simple
on/off check for data collection to control of a large
system. Popularly used tags are as large as an elec-
tronic card, being installed in a larger computer system
with network capability; however, they can be as small
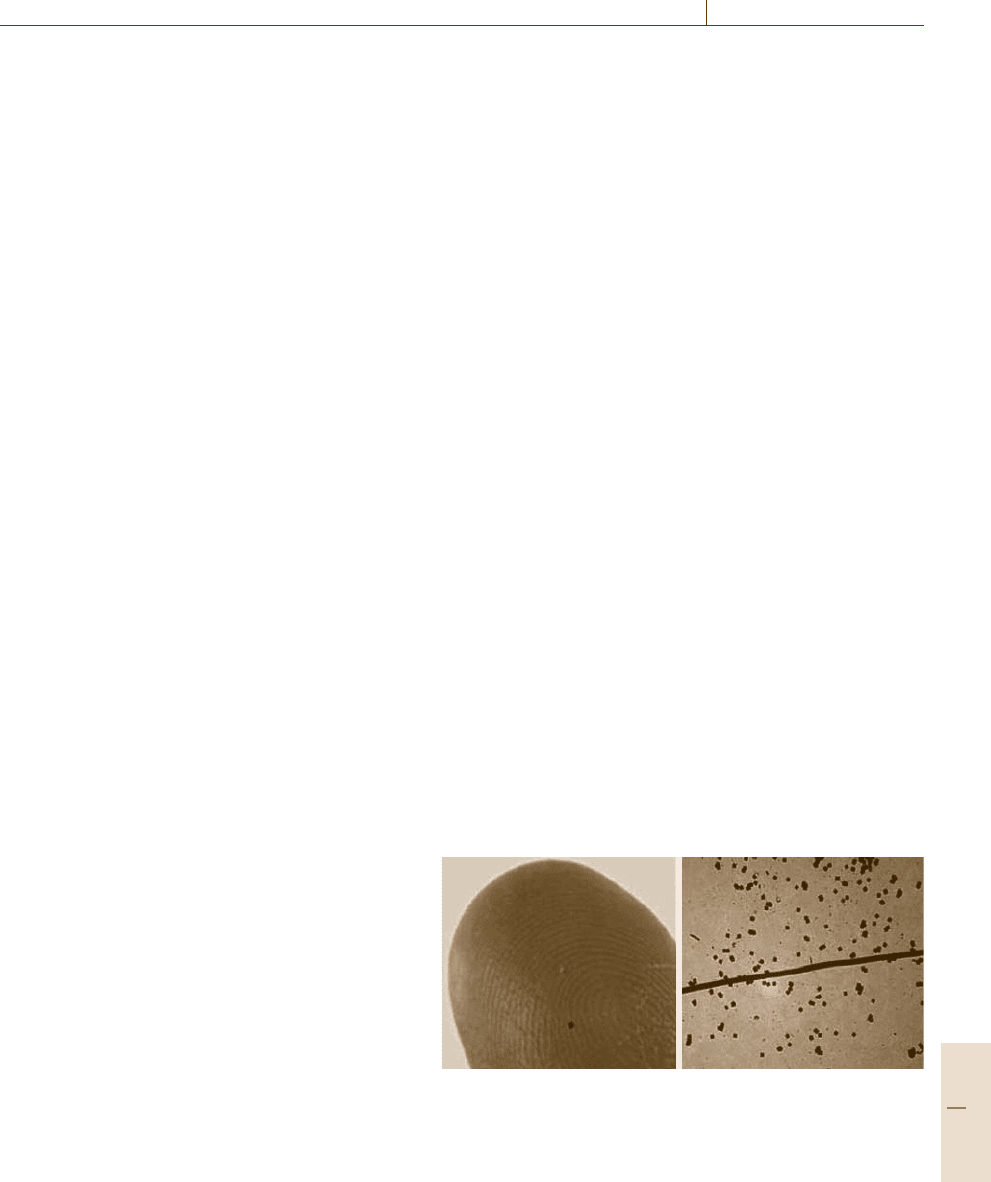
as 0.05×0.05mm
2
, as shown in Fig. 55.10.Onthe
right-hand side of Fig.55.8, powder-type RFID chips
developed by Hitachi are compared with a human hair.
Fig. 55.8 Mu-chips and powder type RFID chips (courtesy of Hi-
tachi)
Part F 55.3

970 Part F Industrial Automation
These powder-type RFID tags are 64 times smaller than
those in current use (0.4×0.4mm
2
mu-chips, on the
left, produced by the same company), which can al-
ready be embedded into paper currency, gift certificates,
and identification documents. For more information in
RFID see Chap.49.
Wireless LAN
A wireless LAN establishes a network environment by
using wireless devices instead of wired ones within
a limited space. One popular application that adopts
wireless LAN in MHA is AGV systems, which use it
for communication between vehicles and controllers.
Each vehicle has a network interface card (NIC)that
is connected to the wireless LAN. An access point is
a gateway to connect to a wired LAN and similar to
a LAN hub, connecting 25–50 vehicles within a range
of 20–150 m. The infrastructure network is always con-
nected to an access point, which connects the wired
LAN with the wireless LAN. In the infrastructure net-
work, the basic service set (BSS) is formed and acts
as a base station connecting all vehicles in the cell to
the LAN. BSSs that use nonoverlapping channels can
be part of an extended service set (ESS). The vehi-
cles within the ESS but in different BSSs are connected
through roaming. Lee and Lee [55.17] develop an in-
tegrated communication system that connects Profibus
and IEEE 802.11, which are wired and wireless LAN
communication protocols, for a container terminal auto-
matedbyanAGV system.Using thisprotocol converter,
the wirelessLAN can beconnected tothe existing wired
fieldbus for soft real-time data exchange that loses some
of its usefulness after a time limit.
Wireless I/O
A wireless I/O device is a small circuit card with an
antenna installed in a material handling system or its
controller; it can be used for both data-acquisition and
closed-loop control applications. It receives microwave
radio data from I/O points, and sends those data to
a central processing device such as a programmable
logic controller (PLC), data loggers, supervisory con-
trol, and data-acquisition system (SCADA), or a general
PC [55.18]. Since it does not use wireless LAN or
a fieldbus, implementation is much easier than afor
wireless LAN. It can be simply regarded as removing
the necessity for wires; however, by itself, it offers many
advantages such as broader connectivity, increased mo-
bility and flexibility, reduced installation time, and
reduced points of failures. One of the disadvantages of
wireless I/O is that, since it uses a relatively narrow
range of wireless signals, a smaller number of wire-
less I/Os can be used in a certain area. Therefore, as the
number of points in an area grows, a wireless or wired
LAN will become more appropriate.
Wireless Sensor Networks
Sensor networks [55.19] are currently limited to novel
systems. Many sensors, distributed in a system or
area, can be used to build a network for monitor-
ing a space shuttle, military equipment unit or nuclear
power plant. Wireless sensor networks conceptually use
small, smart, cheap sensors that consist of a sensing
module, a data-processing module, and communica-
tion components; however, conventional sensors can
also be used. The network is mainly used for mon-
itoring systems that requires highly autonomous and
intelligent decision-making in a dynamic and uncer-
tain environment. They have a great deal of potential
to be adopted in MHA even though few researchers
have studied these applications. There are two ar-
eas of wireless sensor network applications for the
MHA.
First, reliability is oftenvery important for the MHA
because, in a highly automated system, the failure of
an AMHS causes the breakdown of multiple machines
or a whole area operated by the system. This may be
more critical than the failure of an individual process-
ing tool in production systems. Therefore, monitoring
and diagnosing the AMHS lead to some important is-
sues; for instance, vibration sensors and optical sensors
attached to the crane of an AS/RS collaborate to de-
tect a potential problem that might cause positioning
or more critical errors. By detecting the problem before
the AS/RS actually breaks down, engineers can recog-
nize the problem more precisely and prepare required
parts and tools in advance; hence, repair time can be
significantly reduced.
Second, most AMHSs use a closed feedback sys-
tem that controls the system based on feedback from
component systems or sensors. Walker et al. [55.20]
studied a method to control an industrial robot that han-
dles flexible materials such as wires and rubber hoses. It
utilizes feedback from sensor network cameras to pre-
dict the motion of the robot with the better vision. Since
the feedback can be created from many different points
such as grasps, paths, and goal points, it reduces blind
spots of unpredictable motions and greatly enhances
control precision. Chapter 20 provides additional infor-
mation on sensor networks.
Part F 55.3
Material Handling Automation in Production and Warehouse Systems 55.3 Advanced Technologies 971
Table 55.1 Design issues and related studies on MHA
Reference AMHS type Design issue Criteria Solution approach
Cho and Egbelu [55.21] IAMHS MHS equipment Qualitative factors, Fuzzy logic and
selection problem equipment variety knowledge-based rule
(minimizing)
Nadoli and IAMHS Design and Design lead time Expert system,
Rangaswami [55.22] modeling for a new computer simulation
semiconductor fab
Jimenez et al. [55.23] IAMHS Performance Delivery time, Computer simulation
evaluation of AMHS transport time,
throughput
Huang et al. [55.24] General Location of MHS Total distance, Lagrangian relaxation
MHS fixed cost of MHS and heuristic method
Jang et al. [55.25] AS/RS Estimation of AS/RS Delivery rate, Queuing network
performance in-process inventory model
Lee et al. [55.26] AS/RS Optimal design of Space utilization Modular cells,
rack structure with (lost space) heuristic
various sized cells
Ting and Tanchoco AGV Location of the Total rectilinear MIP
[55.27] central path distance
Gaskins and Tanchoco AGV Guide path design: Total flow distance Integer programming,
[55.28] direction of path heuristic
segments
Tanchoco and Sinriech AGV Guide path design: Total flow distance Integer programming
[55.29] optimal design of
a single-loop
Bozer and Srinivasan AGV Guide path design: Balanced workload Integer programming,
[55.30] tandem guide path set partition
Caricato and Grieco AGV Guide path design Flow distance, Simulated annealing
[55.31] computation time
Nazzal and McGinnis AGV Estimation of Vehicle utilization, Queuing network
[55.32] performance blocking time, model
measures empty vehicle
interarrival time
Vis et al. [55.33] AGV Estimation of the Service level Network flow
number of vehicles (waiting time)
55.3.2 Design Methodologies for MHA
MHA design studies largely deal with strategic
decision-making, which includes optimal selection of
automated material handling equipment, locating stor-
age and vehicle paths for new facility planning, rack
design for AS/RSs, flow path design for AGV sys-
tems, and capacity estimation of the system. Table 55.1
briefly summarizes studies related to design issues. The
MHA design problem is sometimes closely related to
the layout design problem in that both consider issues
at a very early stage of system implementation. Also,
they share performance measures in many areas. Pe-
ters and Yang [55.34] integrate these two methods into
Part F 55.3
972 Part F Industrial Automation
a single procedure using the space-filling curve (SFC)
method. Ting and Tanchoco [55.27] propose a new lay-
out design method for a semiconductor fab. They use
an integer programming model to determine the optimal
location of the AGV track. Chung and Jang [55.35] also
suggest a new layout alternative called integrated room
layout for better material handling in a semiconductor
fab and scrutinize the benefits of the layout compared
with existing layout alternatives in the industry using
qualitative and quantitative analysis.
One of the difficulties in design of large-scale
IAMHSs is estimation of system capacity. Although
computer simulation has been used, its feedback cycle
from modeling to results analysisis very slow for a large
problem, which is an issue as timing of the solution
is sometimes very important. Also, a simple determin-
istic analysis using from–to charts of material flows
cannot provide a precise estimation of variances in the
system. As an alternative approach studied for capac-
ity analysis, the queuing network approach shows good
performance [55.32]. Rembold and Tanchoco [55.36]
explore a framework that evaluates and improves a se-
quence of modeling tasks for material flow systems.
They aim to develop a more fundamental solution to
the problems while encountered while designing an
IAMHS. The framework addresses the following ques-
tions of designers: selection of the software application
for solving a problem, organizing the data sets required
for the design, incorporation of the design into parts
that cannot be automated, and diagnosing problems in
material flow systems. Those authors use an open archi-
tecture for the framework, since advance identification
of all factors and cases for evaluation and redesign of
the material flow processes are limited. With the open
architecture for the framework, users can easily find
their own methods by incorporating ad hoc situations
into the framework.
55.3.3 Control Methodologies for MHA
Extensive research has been performed on the control
of the AMHS. Especially, AGV control problems have
benefited from strong research streams in academia and
the MHA industry, since AGVs have been popular for
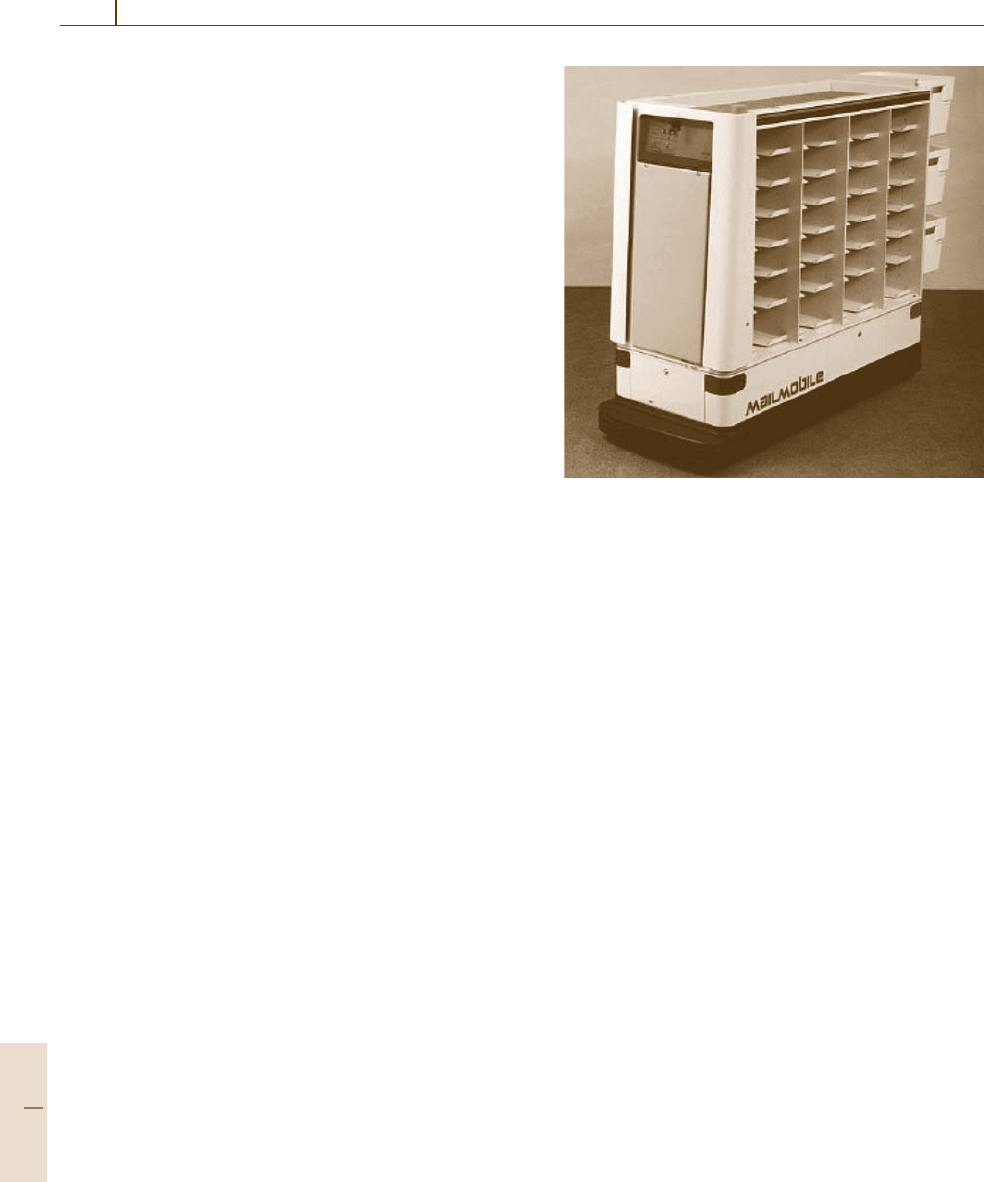
use in many industries. Figure 55.9 shows an inter-
esting AGV design with many storage racks that is
used in a hospital. Recently, two well-organized liter-
ature surveys on the AGV system were published by
Vis [55.37], and by Le-Anh and De Koster [55.38]. One
of the characteristics of control algorithms of MHA
is that minimizing flow distance in time is a dom-
Fig. 55.9 AGV used in a hospital (courtesy of Egemin)
inant criterion, among others. Other criteria such as
resource utilization, throughput, and load balance have
frequently been subgoals to achieve the minimum flow
time. Necessity for a very short response time is an-
other characteristic of control algorithms for the MHA;
for example, a vehicle dispatch algorithm for the AGV
controller should respond within a few seconds or less,
otherwise the vehicle will have to wait for a job com-
mand on the path. For a short response time, the time
horizon of the control algorithms is zero or very short,
because a longer time horizon often causes an explo-
sion of the search space. The minimum control horizon
also helps to yield a reliable solution because uncer-
tain parameters will be used less. If a control algorithm
malfunctions, the result will be more serious than just
a performance drop. It sometimes causes a detrimental
failure in the shop floor. Hence, a conservative approach
tends to be used in real applications.
A big challenge in AGV control problems is that
users want to use a larger loop with many vehicles in or-
der to reduce transportation time and investment. AGV
systems implemented earlier generally used a modular
structure to avoid heavy load on one AGV loop and had
many loops, with a maximum of about five vehicles in
a loop; however, these days, a large loop with a maxi-
mum about 40 vehicles is used. Therefore, the vehicle
dispatch, scheduling, routing, and deadlock avoidance
problems are becoming more complicated and impor-
tant. Table 55.2 summarizes control issues and their
studies in the MHA.
Part F 55.3
Material Handling Automation in Production and Warehouse Systems 55.3 Advanced Technologies 973
Table 55.2 Control issues and related studies on MHA
Researchers AMHS type Control issue Criteria Solution approach
Dotoli and Fanti [55.39] IAMHS Integrated AS/RS and Throughput, Colored Petri nets
RGV control computation time
Mahajan et al. [55.40] AS/RS Job sequencing Throughput Heuristic
(nearest neighborhood)
Lin and Tsao [55.8] AS/RS Crane scheduling for Total fulfillment time Heuristic
batch job in CIM of batch (dynamic availability
environment oriented controller)
Lee et al. [55.41] AS/RS Rack assignment for Expected travel time Heuristic (storage
cargo terminals reservation policy),
stochastic demand stochastic
Chetty and Reddy [55.42] AS/RS Job sequencing 10 criteria (mean flow Genetic algorithm
time, mean waiting
time, min/max
completion time, etc.)
Sinriech and Palni [55.43] AGV Vehicle scheduling Optimality of MIP, heuristic (branch
scheduling solution and bound)
Correa et al. [55.44] AGV Vehicle scheduling Solution time, MIP and CP hybrid
job processing time method
Jang et al. [55.45] AGV Vehicle routing in AGV utilization, Heuristic, look-ahead
clean bay WIP level control procedure
Koo et al. [55.46] AGV Vehicle dispatching Production Heuristic, bottleneck-
throughput, lead time machine first
Kim et al. [55.47] AGV Vehicle dispatching Production throughput Heuristic
in floor shop (balanced work load)
Jeong and Randhawa [55.48] AGV Vehicle dispatching Vehicle travel time, Heuristics, multi-
blocking time, WIP attribute dispatching
Moorthy et al. [55.49] AGV Deadlock avoidance Number of AGVsin Heuristic,
in large-scale AGVS a loop, state prediction
(cycle deadlock) number deadlocks
Bruno et al. [55.50] AGV Empty vehicle Response time Heuristic (location
parking model (MIP)and
shortest path algorithm)
IAMHS Research
Researchers recently started to study complicated is-
sues of the IAMHS. A major concern is routing
strategies from source to destination location in a com-
plicated IAMHS, in which there are multiple routes
from one location to the others. The routes consist
of not only physical paths such as an AGV path or
conveyor track but also AMHS themselves, such as
AS/RSs, AGVSs, and buffer stations. Practical appli-
cations generally store predetermined static shortest
routes in a database for all pairs of source locations and
destinations; however, when the number of components
increases, maintenance problems for the parameters in-
volved become much more difficult since there are too
many combinations of nodes. The shortest-distance al-
gorithm using graph theory with an adjacency matrix
might be a better approach.
A new concept called flow diversion is proposed
to determine dynamic routing based on the load rate
of the routes in automated shipment handling sys-
tems by Cheung et al. [55.51]. The authors utilize the
multicommodity flow models using linear program-
ming (LP) to solve this problem. In this model, the
transfer time for a route is a function of the loads as-
signed to all pairs of unit loads in the system, which
generates a nonlinear function in the objective func-
Part F 55.3

974 Part F Industrial Automation
tion; those authors transform this nonlinear function
to a piecewise-linear function to make the problem
tractable. Lau and Zhao [55.4] study a joint job schedul-
ing problem for the automated air cargo terminal at
Hong Kong, which is mainly composed of AGV sys-
tems, AS/RSs, cargo hoists, and conveyors. In the
model, activities between different AMHSs are trig-
gered by communication between the systems. The
scheduling algorithm constructs a cooperative sequen-
tial job served by different AMHSs, employing the
maximum matching algorithm of the bipartite graph.
A task for an AGV is assigned or matched to an stacker
crane (SC) to reduce the SC delay time. A similar prob-
lem is solved by Meersmans and Wagelmans [55.5].
Their research focuses on the scheduling problem of the
IAMHS in seaport terminals employing a local beam
search algorithm. The nodes explored in the search al-
gorithm are represented by a sequence of container IDs
to be processed by different AMHSs, and the nodes in
branches are cutbased onthe beam widthdetermined by
an evaluation function. Those authors prove that there
existsan optimalsequence of tasks forone AMHS when
the sequence is assigned to the other AMHS.
Sujono and Lashkari [55.52] study another inte-
grating method allocating a part type to a processing
machine and material handling (MH) equipment type
simultaneously in a flexible manufacturing system
(FMS). In that research, there are nine different types
of the material handling systems in the experimental
model. The method improves the algorithms proposed
by Paulo et al. [55.53]andLashkari et al. [55.54]and
uses a 0/1 mixed integer programming model. Two ob-
jective functions are modeled: one minimizes operating
costs related to machine operations, setup, and MH
operations; the other maximizes the compatibility of
the part types using MH equipment types. To measure
compatibility, parameters are quantified from the sub-
jective factors defined by Ayres [55.55]. Some of the
constraints are: balance equations between parts and
process plans, machines and process plan, processing
machines, and MH equipment types. The other impor-
tant constraint sets are capacity constraints: the total
load of the allocated tasks for an MH equipment type
cannot exceed its capacity, and a machine cannot be
allocated more than its capacity. A test problem con-
sisting of 1356 constraints and 3036 binary variables
was solved in about 9.2s by using LINGO in a Pen-
tium 4 PC. Since this model considers many details of
the practical factors in the FMS, and showed a suc-
cessful calculation result, it can be used for many other
practical applications.
In addition to the examples shown above, large-
scale optimization problems such as the vehicle routing
problem (VRP), vehicle scheduling problem (VSP), and
integrated scheduling problem of IAMHS
with con-
sideration of processing machines have been modeled
to increase MHA efficiency. However, to be used for
actual applications and thereby achieve a higher-level
MHA, shorter computation times are urgently required.
In a complicated IAMHS, integrating software pack-
ages such as the MMS need sophisticated algorithms;
however, it also needs high reliability in a dynamic en-
vironment. For most tasks, real-time decision-making
that requires response times within a few seconds is
a precondition for IAMHS algorithms.
MMS-related Issues
The MMS is a key component to integrate different
AMHSsinanIAMHS. Destination allocation, routing
algorithm, and prioritizing algorithm are essential roles
of the MMS, among others. Graph theory is popularly
used to represent components and relationships in the
IAMHS.InFig.55.6, nodes represent the AMHSsand
their subcomponents, such as load/unload ports. Edges
represent the connection and distance between nodes.
As mentioned above, this graph is stored in database
tables using the adjacency and incidence matrices. The
shortest-path algorithm isthe mostimportant and funda-
mental algorithmfor an MMS since it is usedfor several
purposes in the system such as destination assignment
and best routing determination. Dijkstra’s algorithm is
popularly used [55.56]. The Bellman–Ford algorithm
can be used if there are negative weights of the edges.
To determine the final destination of a unit load,
the MMS has to evaluate various factors on the same
scale. More specifically, to determine an AS/RS as the
final destination among several alternatives, the shortest
distance is generally the most important criterion; how-
ever, the full rates of the AS/RSs are sometimes also
important to make the loads balanced between different
AS/RSs. There are two applicable ways to standard-
ize different scales of factors on the same scale. First,
different weight values can be applied for each factor
to find the best alternatives. Second, a priority and its
threshold value can be givento each factor, and the most
important alternativeis selectedif it is within the thresh-
old, otherwise the next alternative will be considered.
Determining the best route from a source to desti-
nation location via several AMHSs is relatively simple
when compared with the vehicle routing problem(VRP)
or vehicle schedulingproblem (VSP), becausethe graph
generally has a smaller number of nodes than those of
Part F 55.3