Naber G.L. The Geometry of Minkowski Spacetime. An Introduction to the Mathematics of the Special Theory of Relativity
Подождите немного. Документ загружается.

204 4 Prologue and Epilogue: The de Sitter Universe
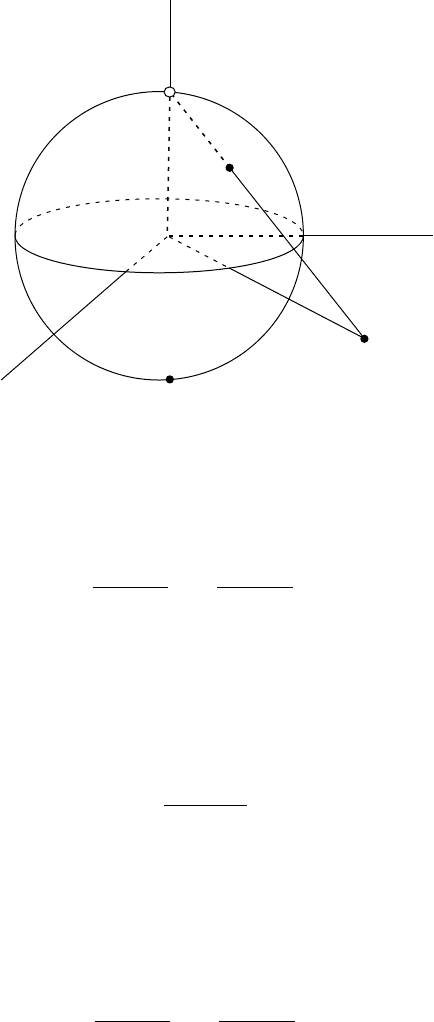
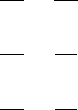
N
p
S
'
S
(p)
Fig. 4.3.1
A simple computation gives
ϕ
S
(p)=ϕ
S
(p
1
,...,p
n
,p
n+1
) (4.3.1)
=
p
1
1 − p
n+1
,...,
p
n
1 − p
n+1
=(x
1
,...,x
n
).
Notice that ϕ
S
is clearly smooth on U
S
. It is, in fact, a bijection onto R
n
since it is a simple matter to check that its inverse
ϕ
−1
S
: R
n
−→ U
S
is given by
ϕ
−1
S
(x)=ϕ
−1
S
(x
1
,...,x
n
)=
1
1+ x
2
(2x
1
,...,2x
n
, x
2
−1). (4.3.2)
Since ϕ
−1
S
is clearly also smooth we find that ϕ
S
is a diffeomorphism of U
S
onto R
n
and so ϕ
−1
S
is a diffeomorphism of R
n
onto U
S
.
Similarly, for each p ∈ U
N
,ϕ
N
(p) is the intersection with u
n+1
=0ofthe
straight line in R
n+1
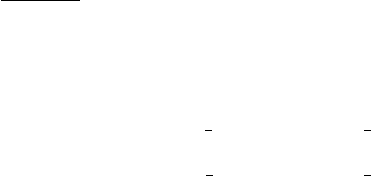
from S through p (see Figure 4.3.2). One finds that
ϕ
N
(p)=ϕ
N
(p
1
,...,p
n
,p
n+1
) (4.3.3)
=
p
1
1+p
n+1
,...,
p
n
1+p
n+1
=(y
1
,...,y
n
)
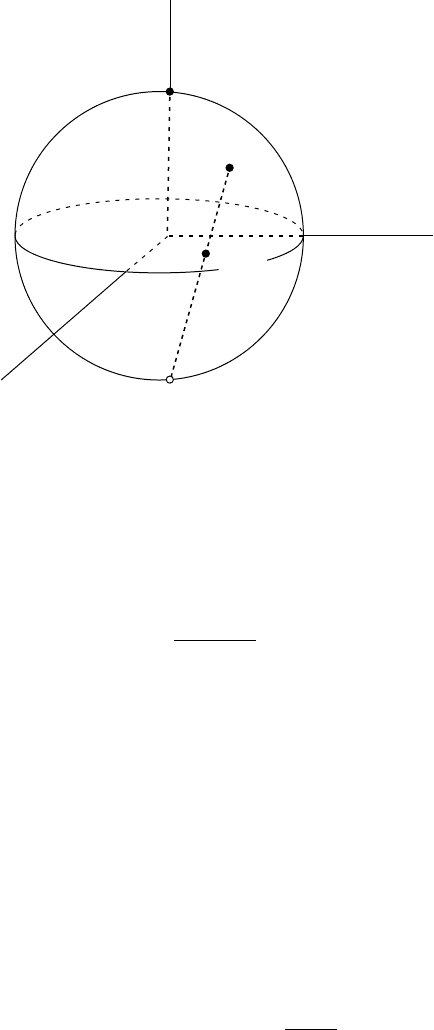
4.3 Mathematical Machinery 205
N
p
S
'
N
(p)
Fig. 4.3.2
which is a smooth bijection with inverse
ϕ
−1
N
: R
n
−→ U
N
given by
ϕ
−1
N
(y)=ϕ
−1
N
(y
1
,...,y
n
)=
1
1+ y
2
(2y
1
,...,2y
n
, 1−y
2
) (4.3.4)
and this is also smooth. Consequently, ϕ
N
: U
N
→ R
n
and ϕ
−1
N
: R
n
→ U
N
are also inverse diffeomorphisms.
We think of the diffeomorphism ϕ
S
as identifying U
S
with R
n
and thereby
supplying the points of U
S
with n coordinates, called (x
1
,...,x
n
)above.
Similarly, ϕ
N
provides points in U
N
with n coordinates (y
1
,...,y
n
). Notice
that a point p in U
S
∩ U
N
= S
n
−{N, S} is therefore supplied with two sets of
coordinates. These are related by the coordinate transformations ϕ
N
◦ ϕ
−1
S
:
ϕ
S
(U
S
∩ U
N
) → ϕ
N
(U
S
∩ U
N
)andϕ
S
◦ ϕ
−1
N
: ϕ
N
(U
S
∩ U
N
) → ϕ
S
(U
S
∩
U
N
). But
ϕ
S
(U
S
∩ U
N
)=ϕ
N
(U
S
∩U
N
)=R
n
−{(0,...,0)}
and it is easy to check that
ϕ
N
◦ ϕ
−1
S
(x)=ϕ
N
◦ ϕ
−1
S
(x
1
,...,x
n
)=
1
x
2
(x
1
,...,x
n
) (4.3.5)

206 4 Prologue and Epilogue: The de Sitter Universe
and
ϕ
S
◦ ϕ
−1
N
(y)=ϕ
S
◦ ϕ
−1
N
(y
1
,...,y
n
)=
1
y
2
(y
1
,...,y
n
). (4.3.6)
The essential content of all this is that S
n
is “locally diffeomorphic to R
n
”
in the sense that each point of S
n
is contained in an open subset of S
n
that
is diffeomorphic to R
n
. This is the prototype for our next definition.
Let n and m be positive integers with n ≤ m. A subset M of R
m
is called
an n-dimensional smooth manifold (or smooth n-manifold) if, for each p ∈ M,
there is an open set U in M containing p and a diffeomorphism ϕ : U → ϕ(U)
of U onto an open subset ϕ(U)ofR
n
.Thus,S
n
is an n-dimensional smooth
manifold in R
n+1
.
Remark: There is a more general definition of “smooth manifold” that does
not require M to be a subset of a Euclidean space (see Chapter 5 of [N
3
]),
but this will suffice for our purposes.
Exercise 4.3.1 Show that every open ball in R
n
is diffeomorphic to R
n
and
conclude that every point in a smooth n-manifold M iscontainedinanopen
subset of M that is diffeomorphic to all of R
n
.
The pair (U, ϕ) is called a chart on M .Asmoothn-manifold is just a subset
M of some Euclidean space for which there exists a family {(U
α
,ϕ
α
):α ∈A}
of charts
ϕ
α
: U
α
−→ ϕ
α
(U
α
) ⊆ R
n
with
8
α∈A
U
α
= M .Eachϕ
α
supplies the points of U
α
with n coordinates,
namely, those of its image in ϕ
α
(U
α
). If U
α
∩U
β
= ∅,thenapointp ∈ U
α
∩U
β
is supplied with two sets of coordinates, say,
ϕ
α
(p)=(x
1
,...,x
n
)
and
ϕ
β
(p)=(y
1
,...,y
n
).
These are related by the transformation equations
ϕ
α
◦ ϕ
−1
β
: ϕ
β
(U
α
∩ U
β
) −→ ϕ
α
(U
α
∩ U
β
)
(x
1
,...,x
n
)=
ϕ
α
◦ ϕ
−1
β
(y
1
,...,y
n
)
and
ϕ
β
◦ ϕ
−1
α
: ϕ
α
(U
α
∩U
β
) −→ ϕ
β
(U
α
∩ U
β
)
(y
1
,...,y
n
)=
ϕ
β
◦ ϕ
−1
α
(x
1
,...,x
n
).
R
n
is itself a smooth n-manifold with a global chart (R
n
, id
R
n
). The corre-
sponding coordinates are just the standard coordinates u
1
,...,u
n
.Thesame
4.3 Mathematical Machinery 207
is true of any open subset of R
n
. To produce more interesting examples we
will need to develop a technique for manufacturing charts. One particularly
simple case is contained in the following exercise.
Exercise 4.3.2 Let V be an open set in R
n
and g : V → R asmooth
real-valued function on V . Show that the graph {(x, g(x)) : x ∈ V } of g in
R
n+1
= R
n
× R is a smooth n-manifold with a global chart.
The sphere S
n
is not the graph of a function of n variables, but it can
be covered by open sets each of which is the graph of a function, e.g., the
hemispheres with u
i
> 0andu
i
< 0fori =1,...,n+ 1. These functions
“parametrize” the hemispheres of S
n
and the projections back onto the do-
mains provide charts. There are, however, many other ways of parametrizing
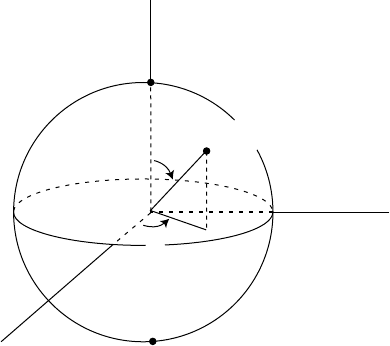
regions on the sphere. For example, the map
χ :[0,π] × [0, 2π] −→ R
3
defined by
χ(φ, θ)=(sinφ cos θ, sin φ sin θ, cos φ) (4.3.7)
maps into (in fact, onto) the 2-sphere S
2
in R
3
and parametrizes S
2
by
standard spherical coordinates. The geometrical interpretation of φ and θ is
N
f
q
( sin f cos q, sin f sin q, cos f )
S
Fig. 4.3.3
the usual one from calculus (see Figure 4.3.3). Notice that χ is one-to-one on
(0,π) × (0, 2π)andcoversallofS
2
except the north and south poles and
the longitudinal curve at θ =0(orθ =2π) joining them. On this open set
in S
2
,χhas an inverse and this has a chance of being a chart. In this case
one can actually calculate this inverse explicitly and show that it is, indeed,
smooth and therefore a chart. To obtain a chart covering the longitudinal
208 4 Prologue and Epilogue: The de Sitter Universe
curve joining the north and south poles (but not N and S themselves) one
canusethesamemapχ, but on the open set (0,π) × (−π, π). To cover N
and S themselves one simply defines an analogous map, but measuring the
angle φ from a different axis. It is customary to be a bit sloppy and refer to
all of these collectively as “spherical coordinates” on S
2
.
We would like to apply this same idea in much more generality. Given
a subset M of R
m
we will find parametrizations of regions in M and hope
to “invert” them to obtain charts. More often than not, however, such in-
verses are difficult or impossible to compute explicitly. Fortunately, there is a
remarkable result from real analysis that can often relieve one of the responsi-
bility of doing this. We will now state this result in the form most convenient
for our purposes and refer to [Sp1] for details.
If U is an open set in R
n
and F : U → R
m
is a smooth map we will write
F =(F
1
,...,F
m
) for the coordinate functions of F, D
j
F
i
for the j
th
partial
derivative of F
i
and, for each a ∈ U, the Jacobian of F at a will be written
F
(a)=(D
j
F
i
(a))
1 ≤ i ≤ m
1 ≤ j ≤ n
=
⎛
⎜
⎝
D
1
F
1
(a) ··· D
n
F
1
(a)
.
.
.
.
.
.
D
1
F
m
(a) ···D
n
F
m
(a)
⎞
⎟
⎠
.
The Inverse Function Theorem applies to the special case in which m = n
and says that when the Jacobian F
(a) is nonsingular, then F is a local
diffeomorphism near a. More precisely, we have
The Inverse Function Theorem: Let U be an open subset of R
n
and
F : U → R
n
a smooth map. Suppose a ∈ U and F
(a) is nonsingular (i.e.,
detF
(a) =0). Then there exist open sets V and W in R
n
with a ∈ V ⊆ U
and F (a) ∈ W ⊆ R
n
such that the restriction of F to V
F | V : V −→ W
is a diffeomorphism onto W, i.e., a smooth bijection with a smooth inverse
(F | V )
−1
: W −→ V.
Moreover,
(F | V )
−1
(F (a)) = (F | V )
(a) .
Now let us suppose that we did not wish to go to the trouble of inverting
the spherical coordinate parametrization
χ :(0,π) × (0, 2π) −→ R
3
χ(φ, θ)=(sinφ cos θ, sin φ sin θ, cos φ)
explicitly on its image in S
2
. We would like to use the Inverse Function
Theorem to conclude nevertheless that it provides a chart at each point in
the image. Let’s write χ in more familiar notation as
4.3 Mathematical Machinery 209
x =sinφ cos θ
y =sinφ sin θ. (4.3.8)
z =cosφ
Then the Jacobian of χ is given by
χ
(φ, θ)=
⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎝
∂x
∂φ
∂x
∂θ
∂y
∂φ
∂y
∂θ
∂z
∂φ
∂z
∂θ
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
=
⎛
⎜
⎜
⎜
⎝
cos φ cos θ −sin φ sin θ
cos φ sin θ sin φ cos θ
−sin φ 0
⎞
⎟
⎟
⎟
⎠
.
We claim that, at each (φ, θ) ∈ (0,π) ×(0, 2π),χ
(φ, θ) has maximal rank
(namely, 2). To see this we compute the determinants of the various 2 × 2
submatrices.
∂x
∂φ
∂x
∂θ
∂y
∂φ
∂y
∂θ
=cosφ sin φ
∂x
∂φ
∂x
∂θ
∂z
∂φ
∂z
∂θ
= −sin
2
φ sin θ
∂y
∂φ
∂y
∂θ
∂z
∂φ
∂z
∂θ
=sin
2
φ cos θ
For φ ∈ (0,π), sin φ = 0 so, for any (φ, θ) ∈ (0,π) × (0, 2π), at least one
of these is nonzero. Let’s suppose we are at a point a =(φ
0
,θ
0
)atwhich
∂x
∂φ
(a)
∂x
∂θ
(a)
∂y
∂φ
(a)
∂y
∂θ
(a)
=0
(the other cases are treated in the same way). Define an open set
˜
U =(0,π) × (0, 2π) × R
210 4 Prologue and Epilogue: The de Sitter Universe
in R
3
and extend χ to a smooth map
˜χ :
˜
U −→ R
3
by
˜χ(φ, θ, t)=(x(φ, θ),y(φ, θ),z(φ, θ)+t)
=(sinφ cos θ, sin φ sin θ, cos φ + t).
The Jacobian of ˜χ is
⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎝
∂x
∂φ
∂x
∂θ
0
∂y
∂φ
∂y
∂θ
0
∂z
∂φ
∂z
∂θ
1
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
and this is nonsingular at (a, 0) = (φ
0
,θ
0
, 0) ∈ R
3
.Since˜χ(a, 0) = χ(a),
the Inverse Function Theorem implies that there are open sets V and W in
R
3
with (a, 0) ∈ V ⊆
˜
U and χ(a) ∈ W ⊆ R
3
such that ˜χ|V : V → W is
a diffeomorphism. The restriction of this diffeomorphism to V ∩ ((0,π) ×
(0, 2π) ×{0}) is therefore a diffeomorphism of an open set in (0,π) ×(0, 2π)
(identified with (0,π) × (0, 2π) ×{0}) containing a onto the intersection of
the image of χ :(0,π) × (0, 2π) → R
3
with W . But this intersection is an
open set in S
2
containing χ(a) so the inverse of this last diffeomorphism is a
chart for S
2
at χ(a).
The bottom line here is this. The smooth parametrization (4.3.8)has
ma
xim
al rank at each point of (0,π) × (0, 2π) and from this alone the
Inverse Function Theorem implies that it can be smoothly inverted on an
open set about any point in (0,π) × (0, 2π), thus providing a chart in S
2
near the image of that point. This is a very powerful technique that we will
use repeatedly, but one should not get carried away. Had we not known in
advance that χ :(0,π) × (0, 2π) → R
3
is one-to-one, this would in no way
follow from what we have done with the Inverse Function Theorem, which
guarantees invertibility only near a point where the Jacobian is nonsingular.
Of course, since we do know that χ is one-to-one on (0,π)×(0, 2π) our argu-
ments show that its inverse is smooth (a map on S
2
is smooth, by definition,
if it is smooth on some open set about each point).
In order to avoid repeating the same argument over and over again we
will now prove a general result that can be applied whenever we need to
manufacture a chart. Thus, let us suppose that M is a subset of some R
m
,U
is an open set in R
n
,wheren ≤ m,and
χ : U −→ R
m

4.3 Mathematical Machinery 211
is a smooth map with χ(U ) ⊆ M .Writex
1
,...,x
n
for the standard
coordinates on R
n
and χ
1
,...,χ
n
,...,χ
m
for the coordinate functions of χ.
Suppose a ∈ U is a point at which the Jacobian χ
(a)hasrankn.Thensome
n ×n submatrix of χ
(a) is nonsingular and, by renumbering the coordinates
if necessary, we may assume that
⎛
⎜
⎝
D
1
χ
1
(a) ··· D
n
χ
1
(a)
.
.
.
.
.
.
D
1
χ
n
(a) ··· D
n
χ
n
(a)
⎞
⎟
⎠
=
∂(χ
1
,...,χ
n
)
∂(x
1
,...,x
n
)
(a)
is nonsingular. If m = n, then the Inverse Function Theorem implies that χ
gives a chart at χ(a). Now assume n<m, define
˜
U = U × R
m−n
and let
˜χ :
˜
U −→ R
m
be defined by
˜χ(x, t)= ˜χ(x
1
,...,x
n
,t
1
,...,t
m−n
)
=(χ
1
(x),...,χ
n
(x),χ
n+1
(x)+t
1
,...,χ
m
(x)+t
m−n
).
Then ˜χ is smooth and its Jacobian at (a, 0) is
⎛
⎜
⎜
⎜
⎝
∂(χ
1
,...,χ
n
)
∂(x
1
,...,x
n
)
(a)O
∂(χ
n+1
,...,χ
m
)
∂(x
1
,...,x
n
)
(a)I
⎞
⎟
⎟
⎟
⎠
,
where O is the n × (m − n) zero matrix and I is the (m − n) × (m − n)
identity matrix. This is nonsingular so the Inverse Function Theorem implies
that there exist open sets V and W in R
m
with (a, 0) ∈ V ⊆
˜
U and ˜χ(a, 0) =
χ(a) ∈ W ⊆ R
m
such that ˜χ|V : V → W is a diffeomorphism. The restriction
of this diffeomorphism to V ∩ (U ×{0}) is therefore a diffeomorphism of an
open set in U (identified with U ×{0}) containing a onto the intersection of
the image of χ : U → R
m
with W . But this intersection is an open set in M
containing χ(a) so the inverse of this last diffeomorphism is a chart for M
at χ(a). We will refer to a smooth map χ : U → M ⊆ R
m
,whereU is open
in R
n
and χ
(a) is nonsingular for each a in U,asacoordinate patch for M .
Thus, each point in the image χ(U ) ⊆ M iscontainedinanopensubsetof
M on which χ
−1
is a chart for M.
We will have occasion to use a great variety of charts (i.e., coordinate
systems) on the manifolds of interest to us so we will pause now to write out
some of these.
Example 4.3.1 We begin with a simple, but useful generalization of the
spherical coordinate parametrization of S
2
. We define a map
χ :[0,π] × [0,π] × [0, 2π] −→ R
4
212 4 Prologue and Epilogue: The de Sitter Universe
by
χ(φ
1
,φ
2
,θ)=(sin φ
1
cos φ
2
, sin φ
1
sin φ
2
cos θ, sin φ
1
sin φ
2
sin θ, cos φ
1
).
Thus,
u
1
=sinφ
1
cos φ
2
u
2
=sinφ
1
sin φ
2
cos θ
u
3
=sinφ
1
sin φ
2
sin θ (4.3.9)
u
4
=cosφ
1
.
A little trigonometry shows that (u
1
)
2
+(u
2
)
2
+(u
3
)
2
+(u
4
)
2
=1soχ maps
into (in fact, onto) S
3
. The Jacobian is
⎛
⎜
⎜
⎜
⎜
⎝
cos φ
1
cos φ
2
−sin φ
1
sin φ
2
0
cos φ
1
sin φ
2
cos θ sin φ
1
cos φ
2
cos θ −sin φ
1
sin φ
2
sin θ
cos φ
1
sin φ
2
sin θ sin φ
1
cos φ
2
sin θ sin φ
1
sin φ
2
cos θ
−sin φ
1
00
⎞
⎟
⎟
⎟
⎟
⎠
.
Computing the determinants of all of the 3 × 3 submatrices we obtain
sin
2
φ
1
cos φ
1
sin φ
2
− sin
3
φ
1
sin
2
φ
2
sin θ
sin
3
φ
1
sin
2
φ
2
cos θ
− sin
3
φ
1
sin φ
2
cos φ
2
.
Note that φ
1
=0givesthepointN =(0, 0, 0, 1) and φ
1
= π gives S =
(0, 0, 0, −1) and that all of the 3 × 3 determinants vanish at these points.
These determinants also vanish when φ
2
=0andφ
2
= π.For(φ
1,
,φ
2
) ∈
(0,π) ×(0,π) one of the second or third determinants above is nonzero. We
conclude, in particular, that each point of (0,π)×(0,π)×(0, 2π)iscontained
in an open set on which χ is a diffeomorphism onto an open set in S
3
and the
inverseofthisisachartonS
3
with coordinate functions (φ
1,
,φ
2
,θ). As for
S
2
one obtains charts at the remaining points of S
3
by either replacing (0, 2π)
with (−π, π) or interchanging the roles of some of the standard coordinates
on R
4
and these charts are collectively called spherical (or hyper-spherical)
coordinates on S
3
. An obvious modification provides, for any ρ>0, spherical
coordinates
u
1
= ρ sin φ
1
cos φ
2
u
2
= ρ sin φ
1
sin φ
2
cos θ
u
3
= ρ sin φ
1
sin φ
2
sin θ (4.3.10)
u
4
= ρ cos φ
1
4.3 Mathematical Machinery 213
on the sphere
(u
1
)
2
+(u
2
)
2
+(u
3
)
2
+(u
4
)
2
= ρ
2
of radius ρ in R
4
.
Exercise 4.3.3 Show that, for ρ>0andforφ
1
,φ
2
and θ exactly as in the
case of S
3
,(4.3.10) determines a chart at each point of R
4
except the origin.
Next we turn to the manifold that will occupy most of our time. It is a 4-
dimensional manifold in R
5
and upon it we will build the de Sitter universe.
Various different coordinate systems on it elucidate different aspects of its
geometrical and physical structure so we will spend some time introducing a
number of them.
We consider the subset D of R
5
given in terms of standard coordinates
u
1
,u
2
,u
3
,u
4
,u
5
by
(u
1
)
2
+(u
2
)
2
+(u
3
)
2
+(u
4
)
2
− (u
5
)
2
=1.
Notice that the intersection of D with u
5
=0isjustS
3
and, more generally,
setting u
5
equal to some constant value u
5
0
gives a slice of D that is just a
3-sphere of radius
1+(u
5
0
)
2
.
Exercise 4.3.4 Show that, in fact, D is diffeomorphic to S
3
× R. Hint:
Consider the map F : D→S
3
× R given by
F (u
1
,u
2
,u
3
,u
4
,u
5
)=
1+(u
5
)
2
−
1
2
u
1
,
1+(u
5
)
2
−
1
2
u
2
,
1+(u
5
)
2
−
1
2
u
3
,
1+(u
5
)
2
−
1
2
u
4
,u
5
.
By virtue of the analogy between D and x
2
+ y
2
−z
2
=1inR
3
we picture D
as a “hyperboloid” in R
5
whose cross-sections at constant u
5
are 3-spheres
rather than circles (see Figure 4.3.4).
Ex
a
mple 4
.3.2 Our first parametrization of D is the most natural one in
light of this picture. We view D as a family of 3-spheres, one for each −∞ <
u
5
< ∞, with radii evolving hyperbolically and each such sphere parametrized
as in (4.3.10). Specifically, we define
u
1
=cosht
G
sin φ
1
cos φ
2
u
2
=cosht
G
sin φ
1
sin φ
2
cos θ
u
3
=cosht
G
sin φ
1
sin φ
2
sin θ (4.3.11)
u
4
=cosht
G
cos φ
1
u
5
=sinht
G