Myint Tyn U., Debnath L. Linear Partial Differential Equations for Scientists and Engineers
Подождите немного. Документ загружается.

12.18 Exercises 531
52. Prove that th e Fourier sine and cosine transforms are linear.
53. If F
s
(n) is the Fourier sine transform of f (x)on0≤ x ≤ l, show that
F
s
[f
′′
(x)] =
2nπ
l
2
[f (0) − (−1)
n
f (l)] −
nπ
l
2
F
s
(n) .
54. If F
c
(n) is the Fourier cosine transform of f (x)on0≤ x ≤ l ,show
that
F
c
[f
′′
(x)] =
2
l
[(−1)
n
f
′
(l) − f
′
(0)] −
nπ
l
2
F
c
(n) .
When l = π, show that
F
c
[f
′′
(x)] =
2
π
[(−1)
n
f
′
(π) − f
′
(0)] − n
2
F
c
(n) .
55. By the transform method, solve
u
t
= u
xx
+ g (x, t) , 0 <x<π, t>0,
u (x , 0) = f (x) , 0 ≤ x ≤ π,
u (0,t)=0,u(π, t) → 0 t>0.
56. By the transform method, solve
u
t
= u
xx
+ g (x, t) , 0 <x<π, t>0,
u (x , 0) = 0, 0 <x<π,
u (0,t)=0,u
x
(π, t)+hu (π, t)=0,t>0.
57. By the transform method, solve
u
t
= u
xx
+ g (x, t) , 0 <x<π, t>0,
u (x , 0) = 0, 0 <x<π,
u (0,t)=0,u
x
(π, t)=0,t>0.
58. By the transform method, solve
u
t
= u
xx
− hu, 0 <x<π, t>0,
u (x , 0) = sin x, 0 ≤ x ≤ π,
u (0,t)=0,u(π, t)=0,t>0.
59. By the transform method, solve
u
tt
= u
xx
+ h, 0 <x<π, t>0,h= constant,
u (x , 0) = 0,u
t
(x, 0) = 0, 0 <x<π,
u
x
(0,t)=0,u
x
(π, t)=0,t>0.

532 12 Integral Transform Methods with Applications
60. By the transform method, solve
u
tt
= u
xx
+ g (x) , 0 <x<π, t>0,
u (x , 0) = 0,u
t
(x, 0) = 0, 0 <x<π,
u (0,t)=0,u(π, t)=0,t>0.
61. By the transform method, solve
u
tt
+ c
2
u
xxxx
=0, 0 <x<π, t>0,
u (x , 0) = 0,u
t
(x, 0) = 0, 0 <x<π,
u (0,t)=0,u(π, t)=0,t>0.
u
xx
(0,t)=0,u
xx
(π, t)=sint, t ≥ 0.
62. Find the temperature distribution u (r, t) in a long cylinder of radius
a when the initial temperature is constant, u
0
, and radiation occurs at
the surface into a medium with zero temperature. Here u (r, t) satisfies
the initial boundary-problem
u
t
= κ
u
rr
+
1
r
u
r
, 0 ≤ r<a, t>0,
u
r
+ αu =0 at r = a, t > 0,
u (r, 0) = u
0
for 0 ≤ r<a,
where κ and α are constants.
63. Apply the fi nite Fourier sine transform to solve the longitudinal dis-
placement field in a uniform bar of length l and cross section A sub-
jected to an external force FA ap plied at the end x = l. The governing
equation and boundary and initial conditions are
c
2
u
xx
= u
tt
,
c
2
=
E
ρ
, 0 <x<l, t>0,
u (0,t)=0 Eu(l, t)=F, t > 0,
u (x , 0) = u
t
(x, 0) = 0, 0 <x<l,
where E is the constant Young’s modulus, ρ is th e density, and F is
constant.
64. Use the finite Fourier cosine transform to solve the heat conduction
problem
u
t
= κu
xx
, 0 <x<l, t>0,
u
x
(x, t)=0 at x = 0 and x = l, t > 0,
u (x , 0) = u
0
for 0 <x<l,
where u
0
and κ are constant.
12.18 Exercises 533
65. Use the Mellin transform to find the solution of the integral equation
∞
−∞
f (x) k (xt) dx = g (t) ,t>0.
66. Use the Mellin transform to show the following results:
(a)
∞
n=1
f (n)=
1
2πi
c+i∞
c−i∞
ζ (p) F (p) dp,
(b)
∞
n=1
f (nx)=M
−1
[ζ (p) F (p)],
where ζ (s) is the Riemann zeta function defined by (6.7.13).
67. Show that the solution of the boundary-value problem
u
rr
+
1
r
u
r
+ u
zz
=0,r≥ 0,z>0,
u (r, 0) = u
0
for 0 ≤ r ≤ a,
u (r, z) → 0asz →∞,
is
u (r, z)=au
0
∞
0
J
1
(ak) J
0
(kr) e
−kz
dk.
68. Show that the asymptotic representation of the Bessel f un ction J
n
(kr)
for large kr is
J
n
(kr)=
1
π
π
0
cos (nθ − kr sin θ) dθ ∼
2
πkr
1
2
cos
kr −
nπ
2
−
π
4
.
69. (a) Use the Laplace transform to solve the heat condu ction problem
u
t
= κu
xx
, 0 <x<∞,t>0,
u (x , 0) = 0,x>0,
u (0,t)=f (t) ,u(x, t) → 0asx →∞,t>0.
(b) Derive Duhamel’s formula
u (x , t)=
t
0
f (t − τ )
∂u
0
∂τ
dτ,
where
∂u
0
∂t
=
x
√
4πκ
t
−3/2
exp
−
x
2
4κt
.

13
Nonlinear Partial Differential Equations with
Applications
“True Laws of Nature cannot be linear.”
Albert Einstein
“... the progress of physics will to a large extent depend on the p rogr ess
of nonlin ear mathematics, of methods to solve nonlinear equations ... and
therefore we can learn by comparing different nonlinear problems.”
Werner Heisenberg
13.1 Introduction
The three-dimensional linear wave equation
u
tt
= c
2
∇
2
u, (13.1.1)
arises in the areas of elasticity, fluid dynamics, acoustics, magnetohydrody-
namics, and electromagnetism.
The general solution of the one-dimensional equation (13.1.1) is
u (x , t)=φ (x − ct)+ψ (x + ct) , (13.1.2)
where φ and ψ are determined by the initial or boundary conditions. Phys-
ically, φ and ψ represent waves moving with constant speed c and without
change of shape, along the positive and the n egative directions of x respec-
tively.
The solutions φ and ψ correspond to the two factors when the one-
dimensional equation (13.1.1) is written in the form
∂
∂t
+ c
∂
∂x
∂
∂t
− c
∂
∂x
u =0. ( 13.1.3)
536 13 Nonlinear Partial Differential Equations with Applications
Obviously, the simplest linear wave equation is
u
t
+ cu
x
=0, (13.1.4)
and its solution u = φ (x − ct) represents a wave moving with a constant
velocity c in the positive x-direction without change of shape.
13.2 One-Dimensional Wave Equation and Method of
Characteristics
The simplest fi rst-order nonlinear wave equation is given by
u
t
+ c (u) u
x
=0, −∞ <x<∞,t>0, (13.2.1)
where c (u) is a given function of u.
We solve this nonlinear equation subject to the initial condition
u (x , 0) = f (x) , −∞ <x<∞. (13.2.2)
Before we discuss the method of solution, the following comments are
in order. First, unlike linear differential equations, the principle of super-
position cannot be applied to find the general solution of nonlinear partial
differential equations. Second, the effect of nonlinearity can change the en-
tire nature of the solution. Third, a study of the above initial-value problem
reveals most of the important ideas for nonlinear hyperbolic waves. Finally,
a large number of physical and engineering probl ems are governed by the
above nonlinear system or an extension of it.
Although the nonlinear system governed by (13.2.1)–(13.2.2) looks sim-
ple, it poses nontrivial problems in applied mathematics, and it l eads sur -
prisingly to new phenomena. We solve the system by the method of char-
acteristics.
In order to construct continuous solutions, we consider the total differ-
ential du given by
du =
∂u
∂t
dt +
∂u
∂x
dx, (13.2.3)
so that the points (x, t) are assumed to lie on a curve Γ . Then, dx/dt
represents the slope of the curve Γ at any point P on Γ . Thus, equation
(13.2.3) becomes
du
dt
= u
t
+
dx
dt
u
x
. (13.2.4)
It follows from this result that (13.2.1) can be regarded as the ordinary
differential equation
du
dt
=0, (13.2.5)
13.2 One-Dimensional Wave Equation and Method of Characteristics 537
along any member of the family of curves Γ which are the solution curves
of
dx
dt
= c (u) . (13.2.6)
These curves Γ are called the characteristic curves of the main equation
(13.2.1). Thus, the solution of (13.2.1) has been reduced to the solution of
a pair of simultaneous ordinary differential equations (13.2.5) and (13.2.6).
Clearly, both the characteristic speed and the characteristics depend on the
solution u.
Equation (13.2.5) implies that u = constant along each characteristic
curve Γ ,andeachc (u) remains constant on Γ . Therefore, (13.2.6) shows
that the characteristic curves of (13.2.1) form a family of straight lines in
the (x, t)-plane with slope c (u). This in dicates that the general solution of
(13.2.1) depends on finding the family of lines. Also, each line with slope
c (u) corresponds to the value of u on it. If the initial point on the charac-
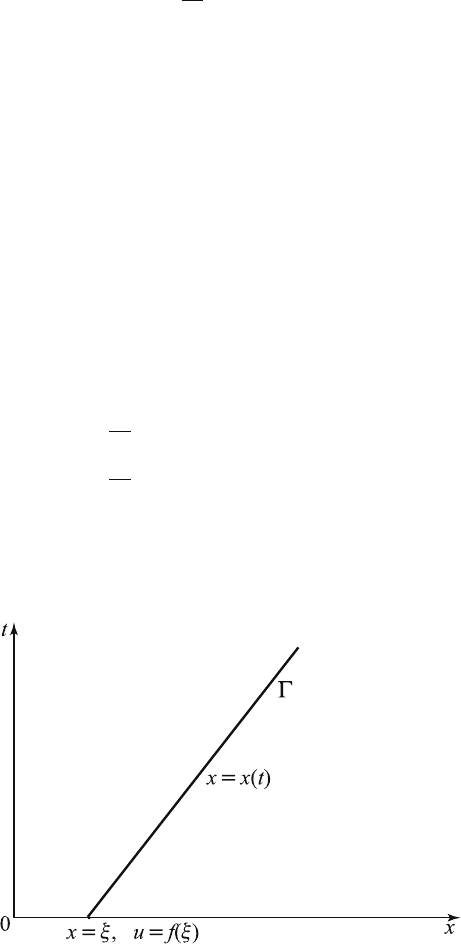
teristic curve Γ is denoted by ξ and if one of the curves Γ intersects t =0
at x = ξ,thenu (ξ, 0) = f (ξ) on the whole of that curve Γ as shown in
Figure 13.2.1.
Thus, we have the following characteristic form on Γ :
dx
dt
= c (u) ,x(0) = ξ, (13.2.7)
du
dt
=0,u(ξ, 0) = f (ξ) . (13.2.8)
These constitute a pair of coupled ordinary differential equations on Γ.
Equation (13.2.7) cannot be solved independently because c is a function
of u. However, (13.2.8) can readily be solved to obtain u = constant and
Figure 13.2.1 A characteristic curve.

538 13 Nonlinear Partial Differential Equations with Applications
hence, u = f (ξ) on the whole of Γ . Thus, (13.2.7) leads to
dx
dt
= F (ξ) ,x(0) = ξ, (13.2.9)
where
F (ξ)=c (f (ξ)) . (13.2.10)
Integrating equation (13.2.9) gives
x = tF (ξ)+ξ. (13.2.11)
This represents the characteristic curve which is a straight line whose slope
is not a constant, but depends on ξ .
Combining these results, we obtain the solution of the initial-value prob-
lem in parametric form
u (x , t)
x
=
=
f (ξ)
ξ + tF (ξ)
, (13.2.12)
where
F (ξ)=c (f (ξ)) .
We next verify that this final form represents an analytic expression of
the solution. Differentiati ng (13.2.12) with respect to x and t, we obtain
u
x
= f
′
(ξ) ξ
x
,u
t
= f
′
(ξ) ξ
t
,
1={1+tF
′
(ξ)}ξ
x
,
0=F (ξ)+{1+tF
′
(ξ)}ξ
t
.
Elimination of ξ
x
and ξ
t
gives
u
x
=
f
′
(ξ)
1+tF
′
(ξ)
,u
t
= −
F (ξ) f
′
(ξ)
1+tF
′
(ξ)
. (13.2.13)
Since F (ξ)=c (f (ξ)), equation (13.2.1) is satisfied provided 1+tF
′
(ξ) =0.
The solution (13.2.12) also satisfies the initial condition at t =0,since
ξ = x, and the solution (13.2.12) is unique.
Suppose that u (x, t)andv (x, t) are two solutions. Then, on x = ξ +
tF (ξ),
u (x , t)=u (ξ, 0) = f (ξ)=v (x, t) .
Thus, we have proved the following:

13.2 One-Dimensional Wave Equation and Method of Characteristics 539
Theorem 13.2.1. The nonlinear initial-value problem
u
t
+ c (u) u
x
=0, −∞ <x<∞,t>0,
u (x , t)=f (x) , at t =0, −∞ <x<∞,
has a unique solution provided 1+tF
′
(ξ) =0, f and c are C
1
(R) functions
where F (ξ)=c (f (ξ)).
The solution is given in the parametric form:
u (x , t)=f (ξ) ,
x = ξ + tF (ξ) .
Remark: When c (u)=constant=c>0, equation (13.2.1) becomes the
linear wave equation (13.1.4). The characteristic curves are x = ct + ξ and
the solution u is given by
u (x , t)=f (ξ)=f (x − ct) .
Physical Significance of (13.2.12).
We assume c (u) > 0. The graph of u at t = 0 is the graph of f. In view of
the fact
u (x , t)=u (ξ + tF (ξ) ,t)=f (ξ
)
the point (ξ,f (ξ)) moves parallel to the x-axis in the positive direction
through a distance tF (ξ)=ct, and the distance moved (x = ξ + ct)de-
pends on ξ. This is a typical nonlinear phenomenon. In the linear case, the
curve moves parallel to the x-axis with constant velocity c, and the solu-
tion r epresents waves travelling without change of shape. Thus, there is a
striking difference between the linear and the nonlinear solution.
Theorem 13.2.1 asserts that the solution of the nonlinear initial-value
problem exists provided
1+tF
′
(ξ) =0,x= ξ + tF
′
(ξ) . (13.2.14)
However, the former condition is always satisfied for sufficiently small time
t. By a solution of the problem, we mean a differentiable function u (x, t).
It follows from results (13.2.13) that both u
x
and u
t
tend to infinity as
1+tF
′
(ξ) → 0. This means that the solution develops a singularity (dis-
continuity) when 1 + tF
′
(ξ) = 0. We consider a point (x, t)=(ξ,0) so that
this condition is satisfied on the characteristics through the point (ξ,0) at
atimet such that
t = −
1
F
′
(ξ)
(13.2.15)

540 13 Nonlinear Partial Differential Equations with Applications
which is positive provided F
′
(ξ)=c
′
(f) f
′
(ξ) < 0. If we assume c
′
(f) > 0,
the above inequality implies that f
′
(ξ) < 0. Hence, the solution (13.2.12)
ceases t o exist for all time if the initial data is such that f
′
(ξ) < 0forsome
value of ξ. Suppose t = τ is the time when the solution first develops a
singularity (discontinuity) for some value of ξ.Then
τ = −
1
min
−∞<ξ<∞
{c
′
(f) f
′
(ξ)}
> 0.
We draw the graphs of the nonlinear solution u (x, t)=f (ξ)belowfor
different values of t =0,τ,2τ, .... The shape of the initial curve for u (x, t)
changes with increasing values of t, and the solution becomes multiple-
valued for t ≥ τ . Therefore, the solution breaks down when F
′
(ξ) < 0for
some ξ, and such breaking is a typical nonlinear phenomenon. In linear
theory, such breaking will never occur.
More precisely, the development of a singularity in the solution for t ≥ τ
can be seen by the following consideration. If f
′
(ξ) < 0, we can find two
values of ξ = ξ
1
, ξ
2
(ξ
1
<ξ
2
) on the initial line such that the characteristics
through them have different slopes 1/c (u
1
)and1/c (u
2
)whereu
1
= f (ξ
1
)
and u
2
= f (ξ
2
)andc (u
2
) <c(u
1
). Thus, these two characteristics will
intersect at a point in the (x, t)-plane for some t>0. Since the character-
istics carry constant values of u, the solution ceases to be single-valued at
their point of intersection. Figure 13.2.2 shows that th e wave profile pro-
gressively distorts itself, and at any instant of time there exists an interval
on the x-axis, where u assumes three values for a given x. The end result
is the development of a nonunique solution, and this leads to breaking.
Therefore, when conditions (13.2.14) are violated the solu tion develops
a discontinuity known as a shock. The analysis of shock involves extension
of a solution to allow for discontinuities. Also, it is necessary to impose on
the solution certain restrictions to b e satisfied across its discontinuity. This
point will be discussed further in a subsequent section.
13.3 Linear Dispersive Waves
We consider a single linear partial differential equation with constant coef-
ficients in the form
P
∂
∂t
,
∂
∂x
,
∂
∂y
,
∂
∂z
u (x,t)=0, (13.3.1)
where P is a polynomial in partial derivatives and x =(x, y, z).
We seek an elementary plane wave solution of (13.3.1) in the form
u (x,t)=ae
i(κ
κ
κ·x−ωt)
, (13.3.2)
where a is the amplitude, κ
κ
κ =(k, l, m) is the wavenumber vector, ω is
the frequency and a, κ
κ
κ, ω are constants. When this plane wave solution is