Myint Tyn U., Debnath L. Linear Partial Differential Equations for Scientists and Engineers
Подождите немного. Документ загружается.

13.9 Discontinuous Solutions and Shock Waves 561
x = X (τ )+
c
0
+
γ +1
2
˙
X (τ )
(t − τ) . (13.8.46)
It is noted that the family Γ
1
represents straight lines with slope dx/dt
increasing with velocity u. Consequently, the characteristics ar e likely to
overlap on the piston, that is,
˙
X (τ ) > 0 for any τ.Ifu increases, so do c,
ρ,andp so that instability develops. It shows that sho cks will be formed in
the compressive part of the disturbance.
13.9 Discontinuous Solutions and Shock Waves
The development of a nonunique solution of a nonlinear hyperbolic equation
has already been discussed in connection with several different problems. In
real physical situations, this nonuniqueness usually manifests itself in the
formation of discontinuous solutions which propagate in the medium. Such
discontinuous solutions across some surf ace are called shock waves. These
waves are found to occur widely in high speed flows in gas dynamics.
In order to investigate the nature of discontinuous solutions, we recon-
sider the nonlinear conservation equation (13.6.5) that is,
∂ρ
∂t
+
∂q
∂x
=0. (13.9.1)
This equation has b een solved under two basic assumptions: (i) There exists
a functional relation between q and ρ,thatis,q = Q (ρ); (ii) ρ and q
are continuously differentiable. In some physical situations, the solution of
(13.9.1) leads to breaking phenomenon. When breaking occurs, questions
arise about the validity of these assumptions. To examine the formation
of discontinuities, we consider the following: (a) we assume the relation
q = Q (ρ) but allow jump discontinuity for ρ and q; (b) in addition to the
fact that ρ and q are continuously differentiable, we assume that q is a
function of ρ and ρ
x
. One of the simplest forms is
q = Q (ρ) − νρ
x
,ν>0. (13.9. 2)
In case (a), we assume the conservation equation (13.6.1) still holds and
has the form
d
dt
x
2
x
1
ρ (x, t) dx + q (x
2
,t) − q (x
1
,t)=0. (13.9.3)
We now assume that there is a discontinuity at x = s (t)wheres is a
continuously differentiable function of t,andx
1
and x
2
are chosen so that
x
2
>s(t) >x
1
,andU (t)= ˙s (t). Equation (13.9.3) can be written as
d
dt
s
−
x
1
ρdx+
x
2
s
+
ρdx
+ q (x
2
,t) − q (x
1
,t)=0,
562 13 Nonlinear Partial Differential Equations with Applications
which implies that
s
−
x
1
ρ
t
dx +˙sρ
s
−
,t
+
x
2
s
+
ρ
t
dx − ˙sρ
s
+
,t
+ q (x
2
,t) − q (x
1
,t)=0,
(13.9.4)
where ρ (s
−
,t), ρ (s
+
,t) are the values of ρ (x, t)asx → s from below and
above respectively. Since ρ
t
is bounded in each of the intervals separately,
the integrals tend to zero as x
1
→ s
−
and x
2
→ s
+
. Thus, in the limit,
q
s
+
,t
− q
s
−
,t
= U
&
ρ
s
+
,t
− ρ
s
−
,t
'
. (13.9.5)
In the conventional notation of shock dynamics, this can be written as
q
2
− q
1
= U (ρ
2
− ρ
1
) , (13.9.6)
or
−U [ρ]+[q]=0, (13.9.7)
where subscripts 1 and 2 are used to denote the values behind and ahead
of the shock respectively, and [ ] denotes the discontinuous jump in the
quantity involved. Equation (13.9.7) is called the shock condition. Thus, the
basic problem can be written as
∂ρ
∂t
+
∂q
∂x
= 0 at points of continuity, (13.9.8)
−U [ρ]+[q] = 0 at points of discontinuity. (13.9.9)
Therefore, we have a nice correspondence
∂ρ
∂t
↔−U [],
∂
∂x
↔ [], (13.9.10)
between the differential equation and the shock condition.
It i s now possible to find discontinuous solutions of (13.9.3). In any
continuous part of the solution, equation (13.9.1) is still satisfied and the
assumption q = Q (ρ) remains valid. But we have q
1
= Q (ρ
1
)andq
2
=
Q (ρ
2
) on the two sides of any shock, and the shock condition (13.9.6) has
the form
U (ρ
2
− ρ
1
)=Q (ρ
2
) − Q (ρ
1
) . (13.9.11)
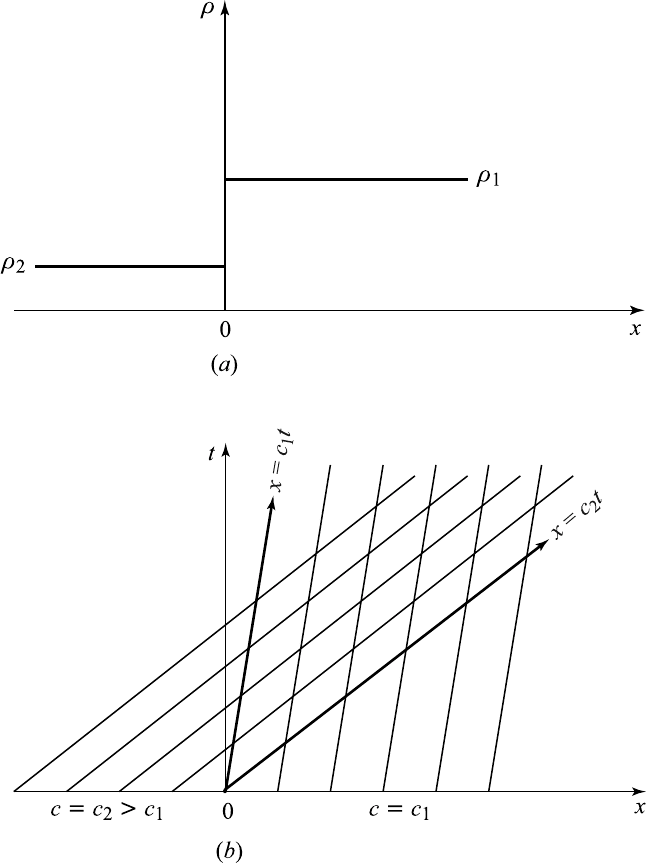
Example 13.9.1. The simplest example in which breaking occurs is
ρ
t
+ c (ρ) ρ
x
=0,
with discontinuous initial data at t =0

13.10 Structure of Shock Waves and Burgers’ Equation 563
ρ =
⎧
⎨
⎩
ρ
2
,x<0
ρ
1
,x>0
, (13.9.12)
and
F (x)=
⎧
⎨
⎩
c
2
= c
2
(ρ) ,x<0
c
1
= c
1
(ρ) ,x>0
, (13.9.13)
where
ρ
1
>ρ
2
and c
2
>c
1
.
In this case, breaking will occur immediately and this can be seen from
Figure 13.9.1ab with c
′
(ρ) > 0. The multivalu ed region b egins at the origin
ξ = 0 and is bounded by the characteristics x = c
1
t and x = c
2
t with
c
1
<c
2
. This corresponds to a centered compression wave with overlapping
characteristics in the ( x , t)-plane.
On the other hand, if the initial condition is expansive with c
2
<c
1
,
there is a continuous solution obtained from (13.2.12) in which all values
of F (x)in[c
2
,c
1
] are taken on characteristics through the origin ξ =0.
This corresponds to a centered fan of characteristics x = ct, c
2
≤ c ≤ c
1
in the (x, t)-plane so that the solu tion has the explicit form c =(x/t),
c
2
< (x/t) <c
1
. The density distribution and the expansion wave are
shown in Figure 13.9.2ab.
In this case, the complete solution is given by
c =
⎧
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎩
c
2
,x≤ c
2
t
x
t
,c
2
t<x<c
1
t
c
1
,x≥ c
1
t.
(13.9.14)
13.10 Structure of Shock Waves and Burgers’ Equation
In order to resolve b reakin g, we assumed a functional relation in ρ and q
with appropriate shock conditions. Now we investigate the case when
q = Q (ρ) − νρ
x
,ν>0. (13.10.1)
Note that near breaking where ρ
x
is large, (13.10.1) gives a better approx-
imation. With (13.10.1), the basic equation (13.9.1) becomes
ρ
t
+ c (ρ) ρ
x
= νρ
xx
, (13.10.2)
564 13 Nonlinear Partial Differential Equations with Applications
Figure 13.9.1ab Density distribution and centered compression wave with over-
lapping characteristics.
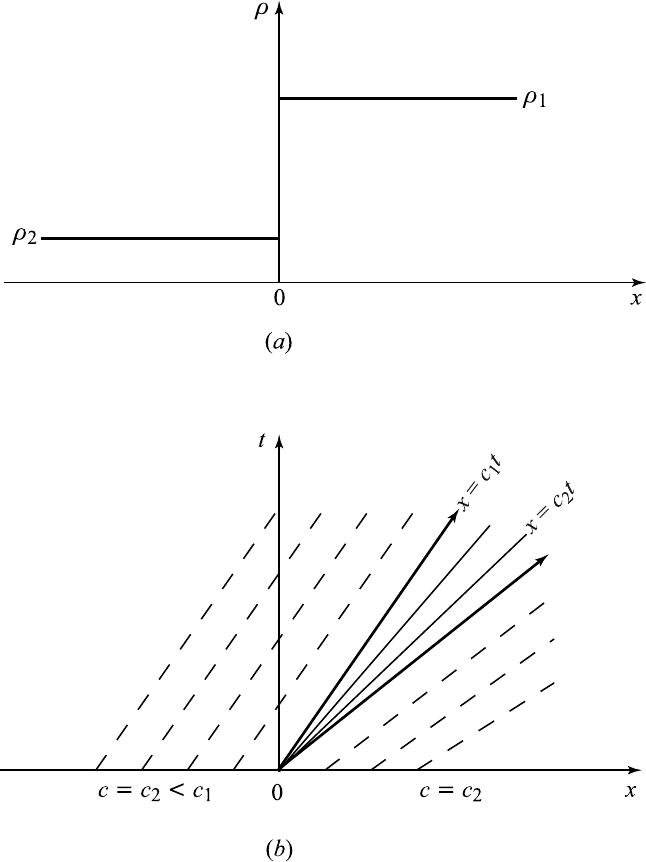
13.10 Structure of Shock Waves and Burgers’ Equation 565
Figure 13.9.2ab Density distribution and centered expansion wave.

566 13 Nonlinear Partial Differential Equations with Applications
where c (ρ)=Q
′
(ρ), the second and the third terms represent the effects
on nonlinearity and diffusion.
We first solve (13.10.2) for two simple cases: (i) c (ρ)=constant=c,
and (ii) c (ρ) ≡ 0. In the first case, equation (13.10.1) becomes linear and
we seek a plane wave solution
ρ (x, t)=a exp {i (kx − ωt)}. (13.10.3)
Substituting this solution into the lin ear equation (13.10.2), we have the
dispersion relation
ω = ck − iνk
2
, (13.10.4)
where
Im ω = −νk
2
< 0, since ν>0.
Thus, the wave profile has the form
ρ (x, t)=ae
−νk
2
t
exp [ik (x − ct)] (13.10.5)
which represents a diffusive wave (Im ω<0) with wavenumbers k and phase
velocity c whose amplitude decays exponentially with time t. The decay
time is given by t
0
=
νk
2
−1
which becomes smaller and smaller as k
increases with fixed ν. Thus, the waves of smaller wavelengths decay faster
than waves of longer wavelengths. On the other hand, for a fixed wavenum-
ber k, t
0
decreases as ν increases so that waves of a given wavelength atten-
uate faster in a medium with larger ν. The quantity ν may be regarded as
a measure of diffusion . Final ly, after a sufficiently long time (t ≫ t
0
)only
disturbances of long wavelength will survive, while all short wavelength
disturbances will decay rapidly.
In the second case, (13.10.2) reduces to the linear diffusion equation
ρ
t
= νρ
xx
. (13.10.6)
This equation with the initial data at t =0
ρ =
⎧
⎨
⎩
ρ
1
,x<0
ρ
1
,x>0,
ρ
1
>ρ
2
, (13.10.7)
can readily be solved, and the solution for t>0is
ρ (x, t)=
ρ
1
2
√
πν t
0
−∞
e
−(x−ξ)
2
/4νt
dξ +
ρ
2
2
√
πν t
∞
0
e
−(x−ξ)
2
/4νt
dξ.
(13.10.8)
After some manipulation involving changes of variables of integration
(x − ξ) /2
√
νt = η, the solution is simplified to the form
13.10 Structure of Shock Waves and Burgers’ Equation 567
u (x , t)=
1
2
(ρ
1
+ ρ
2
)+(ρ
2
− ρ
1
)
1
√
π
x/2
√
νt
0
e
−η
2
dη, (13.10.9)
=
1
2
(ρ
1
+ ρ
2
)+
1
2
(ρ
2
− ρ
1
)erf
x
2
√
νt
. (13.10.10)
This shows that the effect of the term νρ
xx
is to smooth out the initial
distribution (νt)
−
1
2
. The solution tends to values ρ
1
, ρ
2
as x →
+ ∞.The
absence of the term νρ
xx
in (13.10.2) leads to nonlinear steepening and
breaking. Indeed, equation (13.10.2) combines the two opposite effects of
breaking and diffusion. The sign of ν is important; indeed, solutions are
stable or unstable according as ν>0orν<0.
In order to investigate solutions that balance between steepening and
diffusion, we seek solutions of (13.10.2) in the form
ρ = ρ (X) ,X= x − Ut, (13.10.11)
where U is a constant to be determined.
It follows from (13.10.2) that
[c (ρ) − U] ρ
X
= νρ
XX
. (13.10.12)
Integrating this equation gives
Q (ρ) − Uρ + A = νρ
X
, (13.10.13)
where A is a constant of integration.
Integrating (13.10.13) with resp ect to X gives an implicit relation for
ρ (X) in the form
X
ν
=
dρ
Q (ρ) − Uρ + A
. (13.10.14)
We would like to have a solution which tends to ρ
1
, ρ
2
as X →
+ ∞.If
such a solution exists with ρ
X
→ 0as|X|→∞, the quantities U and A
must satisfy
Q (ρ
1
) − Uρ
1
+ A = Q (ρ
2
) − Uρ
2
+ A =0, (13.10.15)
which implies that
U =
Q (ρ
1
) − Q (ρ
2
)
ρ
1
− ρ
2
. (13.10.16)
This is exactly the same as the shock velocity obtain ed before.
Result (13.10.15) shows that ρ
1
, ρ
2
are zeros of Q (ρ) − Uρ + A.In
the limit ρ → ρ
1
or ρ
2
, the integral (13.10.14) diverges an d X → +
∞.If
c
′
(ρ) > 0, then Q (ρ)−Uρ+A ≤ 0inρ
2
≤ ρ ≤ ρ
1
and then ρ
X
≤ 0 because
568 13 Nonlinear Partial Differential Equations with Applications
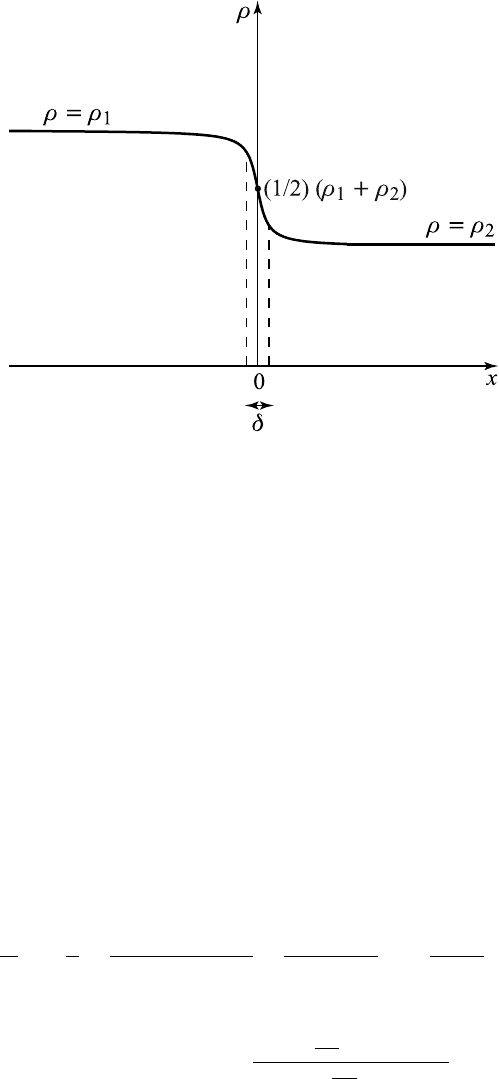
Figure 13.10.1 Shock structure and shock thickness.
of (13.10.11). Thus, ρ decreases monotonically from ρ
1
at X = −∞ to ρ
2
at X = ∞ as shown in Figure 13.10.1.
Physically, a continuous waveform carrying an increase in ρ will progres-
sively distort itself and eventually break forward and require a shock with
ρ
1
<ρ
2
provided c
′
(ρ) > 0. It will break backward and require a shock
with ρ
1
>ρ
2
and c
′
(ρ) < 0.
Example 13.10.1. Obtain the solution of (13.10.2) with the initial data
(13.10.7) and Q (ρ)=αρ
2
+ βρ + γ, α>0.
We write
Q (ρ) − Uρ + A = −α (ρ
1
− ρ)(ρ − ρ
2
) ,
where
U = β + α (ρ
1
+ ρ
2
)andA = αρ
1
ρ
2
− γ.
Integral (13.10.14) becomes
X
ν
= −
1
α
dρ
(ρ − ρ
2
)(ρ
1
− ρ)
=
1
α (ρ
1
− ρ
2
)
log
ρ
1
− ρ
ρ − ρ
2
,
which gives the solution
ρ (X)=ρ
2
+(ρ
1
− ρ
2
)
exp
αX
ν
(ρ
2
− ρ
1
)
!
1+exp
αX
ν
(ρ
2
− ρ
1
)
!
. (13.10.17)
13.10 Structure of Shock Waves and Burgers’ Equation 569
The exponential factor in the solution indicates the existence of a tran-
sition layer of thickness δ of the order of ν/[α (ρ
1
− ρ
2
)]. This can also be
referred to as the shock thickness. The thickness δ increases as ρ
1
→ ρ
2
for
afixedν. It tends to zero as ν → 0forafixedρ
1
and ρ
2
.
In this case, the shock velocity (13.10.16) becomes
U = α (ρ
1
− ρ
2
)+β =
1
2
(c
1
+ c
2
) , (13.10.18)
where c (ρ)=Q
′
(ρ), c
1
= c (ρ
1
), and c
2
= c (ρ
2
).
We multiply (13.10.2) by c
′
(ρ) and simplify to obtain
c
t
+ cc
x
= νc
xx
− νc
′′
(ρ) ρ
2
x
. (13.10.19)
Since Q (ρ) is a quadratic expression in ρ,thenc (ρ)=Q
′
(ρ) becomes
linear in ρ and c
′′
(ρ) = 0. Thus, (13.10.19) leads to Burgers’ equation
replacing c with u
u
t
+ uu
x
= νu
xx
. (13.10.20)
This equation incorporates the combined opposite effects of nonlinearity
and diffusion . It is the simplest nonlinear model equation for diffusive waves
in fluid dynamics. Using the Cole–Hopf transformation
u = −2ν
φ
x
φ
. (13.10.21)
Burgers’ equation can be solved exactly, and th e opposite effects of nonlin-
earity and diffusion can be investigated in some detail.
We introduce the transformation in two steps. First, we write u = ψ
x
so that (13.10.20) can readily be integrated to obtai n
ψ
t
+
1
2
ψ
2
x
= νψ
xx
. (13.10.22)
Thenextstepistointroduceψ = −2ν log φ and to transform this
equation into the so called diffusion equation
φ
t
= νφ
xx
. (13.10.23)
This equation was solved in earlier chapters. We simply quote the solu-
tion of the initial-value problem of (13.10.23) with the initial data
φ (x, 0) = Φ (x) , −∞ <x<∞. (13.10.24)
The solution for φ is
φ (x, t)=
1
2
√
πν t
∞
−∞
Φ (ζ)exp
−
(x − ζ)
2
4νt
dζ, (13.10.25)
570 13 Nonlinear Partial Differential Equations with Applications
where Φ (ζ) can be written in terms of the initial value u (x, 0) = F (x)by
using (13.10.21). It turns out that, at t =0,
φ (x, t)=Φ (x)=exp
−
1
2ν
x
0
F (α) dα
. (13.10.26)
It is then convenient to write down φ (x, t) in the form
φ (x, t)=
1
2
√
πν t
∞
−∞
exp
−
f
2ν
dζ, (13.10.27)
where
f (ζ,x, t)=
ζ
0
F (α) dα +
(x − ζ)
2
2t
. (13.10.28)
Consequently,
φ
x
(x, t)=−
1
4ν
√
πν t
∞
−∞
(x − ζ)
t
exp
−
f
2ν
dζ. (13.10.29)
Therefore, the solution for u follows from (13.10.21) and has the form
u (x , t)=
*
∞
−∞
x−ζ
t
exp
−
f
2ν
dζ
*
∞
−∞
exp
−
f
2ν
dζ
. (13.10.30)
Although this is the exact solution of Burgers’ equation, p hysical inter-
pretation can hardly be given unless a suitably simple form of F (x) is sp ec-
ified. Even then, finding an exact evaluation of the integrals in (13.10.30)
is a formidable task. It is then necessary to resort to asymptotic methods.
Before we deal with asymptotic analysis, the following example may be
considered for an investigation of shock formation.
Example 13.10.2. Find the solution of Burgers’ equation with physical sig-
nificance for the case
F (x)=
⎧
⎨
⎩
Aδ(x) ,x<0
0,x>0.
We first find
f (ζ,x, t)=A
ζ
0+
δ (α) dα +
(x − ζ)
2
t
=
⎧
⎪
⎨
⎪
⎩
(x−ζ)
2
2t
− A, ζ < 0
(x−ζ)
2
2t
,ζ>0.