Mrinal K Pal. Power system stability
Подождите немного. Документ загружается.

EFFECT OF EXCITATION ON STABILITY
6-17
Evaluation of damping torque
(i) No voltage regulator action
With no voltage regulator action,
∆E
fd
= 0. Therefore, substituting (6.91) and (6.94) into (6.87),
we obtain
δ
∆
′
+
+
′
+
−=∆
sTK
KKK
sTK
KKK
KP
qodo
e
7
879
3
432
1
11
(6.101)
The third term in the above expression is due to the
q axis damper winding. K
7
is positive and the
product
K
8
K
9
is negative. Therefore, the effect of the q axis damper winding is to provide
additional damping.
From equation (6.101), for an oscillatory frequency
ω
, the damping coefficient is obtained as:
22
7
2
8
2
79o
22
3
2
4
2
32o
11
qo
qo
do
do
d
TK
TKKK
TK
TKKK
K
′
+
′
−
′
+
′
=
ω
ω
ω
ω
(6.102)
The first term in the above expression is due to the field winding and the second term is due to
the
q axis damper winding.
Substituting the expressions for
K
2
, K
3
etc. in (6.102), the damping coefficient can also be
expressed as
2222
22
o
2222
22
o
)()(
cos)(
)()(
sin)(
qoqeqe
qoqqb
dodede
doddb
d
Txxxx
TxxV
Txxxx
TxxV
K
′′
+++
′′
−
+
′′
+++
′′
−
=
ω
δω
ω
δω
(6.103)
Example
Consider the system used in the previous example, with the additional data due to the q axis
damper winding given as
5.0,5.0
=
′
=
′
qoq
Tx
K
1
through K
10
are computed from equations (6.88) through (6.100), and are obtained as:
27.0,6224.0,5726.0,4651.0,3203.0
1214.0,6071.1,3652.0,4222.1,5223.1
109876
54321
=−====
−
=
=
=
==
KKKKK
KKKKK
Using these values, the two terms of the right-hand side of equation (6.102) are computed as:
323.2
1
22
3
2
4
2
32o
=
′
+
′
do
do
TK
TKKK
ω
ω
354.3
1
22
7
2
8
2
79o
=
′
+
′
−
qo
qo
TK
TKKK
ω
ω
Therefore, the damping coefficient, obtained by adding the two terms, is:
K
d
= 5.677
Note that the contribution to damping due to the
q axis damper winding is substantial.
EFFECT OF EXCITATION ON STABILITY
6-18
(ii) Effect of voltage regulator
The linearized equation of the excitation control system is given by equation (6.45). Substituting
(6.97) into (6.45), and the result in (6.91), we obtain
[]
δδ
∆
′
+
−
′
∆+
′
∆+∆
′
+
−
=
′
∆
sTK
KK
sGeKeK
sTK
K
e
do
dq
do
q
3
43
1065
3
3
1
)(K
1
which yields, using (6.94),
δ
∆
′
+
+
′
+
++
′
+
−
=
′
∆
)(
1
1
)(
1
1
1
1
3
63
7
1087
5
4
3
43
sG
sTK
KK
sG
sTK
KKK
K
K
sTK
KK
e
do
qo
do
q
(6.104)
Comparing this expression with that given in (6.70), it is seen that the effect of the
q axis damper
winding is to add an extra term in the numerator. As before, damping coefficient is obtained
from (6.87), (6.104) and (6.94), as
′
+
+
′
+
+
′
+
++
′
+
−
=
qo
do
qo
do
d
TKj
KKK
jG
TKj
KK
jG
TKj
KKK
K
K
TKj
KKK
K
7
987
3
63
7
1087
5
4
3
432o
1
)(
1
1
)(
1
1
1
1
Im
ω
ω
ω
ω
ω
ωω
ω
(6.105)
Note that the excitation control action does not affect the damping on the q axis, although the
presence of the q axis damper winding influences the change in damping on the d axis due to
excitation control action.
Example
Consider the excitation control parameters as used in a previous example. G(j
ω
) was computed
as:
G(j
ω
) = 11.5∠−21.2
Performing the computation as indicated in (6.105), the d axis component of the damping
coefficient is
d
d
K = 0.5
Note that the reduction in damping is substantial
The q axis component of the damping coefficient is not affected by excitation control and, as
computed previously, is
q
d
K = 3.354
Therefore, the total damping is
K
d
= 3.854
Next, consider the excitation control parameters where G(j
ω
) is
G(j
ω
) = 2.5∠−71.5
EFFECT OF EXCITATION ON STABILITY
6-19
Performing the computation in (6.105),
d
d
K = 2.11
The total damping is therefore
K
d
= 2.11 + 3.354 = 5.464
The reduction in damping in this case is negligible.
(b)
One damper winding on the d axis, two damper windings on the q axis
The equations of the synchronous machine with one damper winding on the d axis and two
damper windings on the q axis are (here we use the equations in the form of equations (5.144) –
(5.146) of Chapter 5, with one additional damper winding added to the q axis.)
qdddfd
q
do
eixxE
dt
ed
T
′
−
′
−−=
′
′
)( (6.106)
qdddq
q
do
eixxe
dt
ed
T
′′
−
′′
−
′
−
′
=
′′
′′
)( (6.107)
dqqq
d
qo
eixx
dt
ed
T
′
−
′
−=
′
′
)( (6.108)
dqqqd
d
qo
eixxe
dt
ed
T
′′
−
′′
−
′
+
′
=
′′
′′
)(
(5.109)
qddqqqdde
iixxieieP )(
′
′
−
′
′
+
′
′
+
′
′
=
(6.110)
qqdqqdd
ixeixee
′
′
+
′
′
=
′
+
′
= (6.111)
ddqddqq
ixeixee
′
′
−
′
′
=
′
−
′
= (6.112)
From (6.111), (6.112) and (6.11), (6.12) we obtain
de
b
de
q
de
b
de
q
d
xx
V
xx
e
xx
V
xx
e
i
′′
+
−
′′
+
′
′
=
′
+
−
′
+
′
=
δδ
coscos
(6.113)
qe
b
qe
d
qe
b
qe
d
q
xx
V
xx
e
xx
V
xx
e
i
′′
+
+
′′
+
′
′
−
=
′
+
+
′
+
′
−
=
δδ
sinsin
(6.114)
Linearization of (6.106) through (6.114) yields
qdddfd
q
do
eixxE
dt
ed
T
′
∆−∆
′
−−∆=
′
∆
′
)( (6.115)
qdddq
q
do
eixxe
dt
ed
T
′′
∆−∆
′′
−
′
−
′
∆=
′′
∆
′′
)( (6.116)
dqqq
d
qo
eixx
dt
ed
T
′
∆−∆
′
−=
′
∆
′
)(
(6.117)
dqqqd
d
qo
eixxe
dt
ed
T
′′
∆−∆
′′
−
′
+
′
∆=
′′
∆
′′
)(
(6.118)
)()(
qdqddqqqqqdddde
iiiixxieieieieP ∆
+
∆
′
′
−
′
′
+
∆
′
′
+
′
′
∆
+
∆
′′
+
′′
∆
=∆ (6.119)
EFFECT OF EXCITATION ON STABILITY
6-20
qqdqqdd
ixeixee
∆
′
′
+
′
′
∆
=
∆
′
+
′
∆=∆ (6.120)
ddqddqq
ixeixee
∆
′
′
−
′
′
∆
=
∆
′
−
′
∆=∆
(6.121)
δ
δ
δ
δ
∆
′′
+
+
′′
∆
′′
+
=∆
′
+
+
′
∆
′
+
=∆
de
b
q
dede
b
q
de
d
xx
V
e
xxxx
V
e
xx
i
sin
1
sin
1
(6.122)
δ
δ
δ
δ
∆
′′
+
+
′′
∆
′′
+
−=∆
′
+
+
′
∆
′
+
−=∆
qe
b
d
qeqe
b
d
qe
q
xx
V
e
xxxx
V
e
xx
i
cos
1
cos
1
(6.123)
Substituting (6.122) and (6.123) into (6.119), and rearranging, we obtain
dqe
eKeKKP
′
′
∆
+
′
′
∆
+
∆
=∆
171615
δ
(6.124)
where
[][]
qe
b
ddqq
de
b
qdqd
xx
V
ixxe
xx
V
ixxeK
′′
+
′′
−
′′
+
′′
+
′′
+
′′
−
′′
+
′′
=
δδ
cos
)(
sin
)(
15
(6.125)
de
b
q
de
qe
de
d
xx
V
i
xx
xx
xx
e
K
′′
+
=
′′
+
′
′
+
+
′′
+
′′
=
δ
sin
16
(6.126)
qe
b
d
qe
de
qe
q
xx
V
i
xx
xx
xx
e
K
′′
+
−=
′′
+
′′
+
+
′′
+
′′
−=
δ
cos
17
(6.127)
Substituting (6.122) first in (6.115) and then in (6.116), and rearranging, we obtain
δ
∆
′
+
−∆
′
+
=
′
∆
sTK
KK
E
sTK
K
e
do
fd
do
q
3
43
3
3
11
(6.128)
where K
3
and K
4
are as given by (6.92) and (6.93), respectively, and
δ
∆
′′
+
−
′
∆
′′
+
=
′′
∆
sTK
KK
e
sTK
K
e
do
q
do
q
11
1211
11
11
11
(6.129)
where
de
de
xx
xx
K
′
+
′′
+
=
11
(6.130)
δ
sin
12 b
de
dd
V
xx
xx
K
′′
+
′′
−
′
= (6.131)
Substitution of (6.128) into (6.129) yields
δ
∆
′′
+
+
′′
+
′
+
−∆
′′
+
′
+
=
′′
∆
sTK
KK
sTKsTK
KKK
E
sTKsTK
KK
e
dododo
fd
dodo
q
11
1211
113
1143
113
113
1)1()1()1()1(
(6.132)
In a similar way, from (6.117), (6.118) and (6.123), we obtain
δ
∆
′′
+
+
′′
+
′
+
=
′′
∆
sTK
KK
sTKsTK
KKK
e
qoqoqo
d
13
1413
137
1387
1)1()1(
(6.133)
EFFECT OF EXCITATION ON STABILITY
6-21
where K
7
and K
8
are given by (6.95) and (6.96)
qe
qe
xx
xx
K
′
+
′′
+
=
13
(6.134)
δ
cos
14 b
qe
qq
V
xx
xx
K
′′
+
′′
−
′
=
(6.135)
Evaluation of damping torque
(i) No voltage regulator action
With no voltage regulator action, ∆E
fd
= 0. Therefore, substituting (6.132) and (6.133) into
(6.124), we obtain
′′
+
−
′′
+
′
+
−=∆
sTK
KKK
sTKsTK
KKKK
KP
dododo
e
11
161211
113
161143
15
1)1()1(
δ
∆
′′
+
+
′′
+
′
+
+
sTK
KKK
sTKsTK
KKKK
qoqoqo 13
171413
137
171387
1)1()1(
(6.136)
Since
qoqododo
TTTT
′
<<
′′′
<<
′′
and , the above expression can be approximated as
′′
+
−
′
+
−=∆
sTK
KKK
sTK
KKKK
KP
dodo
e
11
161211
3
161143
15
11
δ
∆
′′
+
+
′
+
+
sTK
KKK
sTK
KKKK
qoqo 13
171413
7
171387
11
(6.137)
Substituting the expressions for K
3
, K
4
, etc. in the above expression, the damping torque
coefficient at oscillation frequency
ω
is obtained as
δ
ωω
ω
2
22222222
2
o
sin
)()(
)(
)()(
)(
′′′′
++
′
+
′′′′
−
′
+
′′
+++
′′
−
=
dodede
dodd
dodede
dodd
bd
Txxxx
Txx
Txxxx
Txx
VK
δ
ωω
ω
2
22222222
2
o
cos
)()(
)(
)()(
)(
′′′′
++
′
+
′′′′
−
′
+
′′
+++
′′
−
+
qoqeqe
qoqq
qoqeqe
qoqq
b
Txxxx
Txx
Txxxx
Txx
V (6.138)
The first term is due to the field winding and the d axis damper winding, and the second term is
due to the q axis damper windings.
Example
Consider the previous example with the following additional parameter values:
05.0,025.0,2.0,18.0
=
′
′
=
′
′
=
′′
=
′′
qodoqd
TTxx
Substituting these and the other parameter values in (6.138), we obtain the d axis component of
the damping coefficient
EFFECT OF EXCITATION ON STABILITY
6-22
d
d
K = 5.5
and the q axis component
q
d
K
= 5.42
Therefore the total damping is
K
d
=
d
d
K +
q
d
K = 10.92
Note that the contribution to damping due to the additional damper winding is substantial.
(ii)
Effect of voltage regulator
The effect of voltage regulator can be included in the analysis following the procedure described
earlier. However, in the presence of damper windings on both d and q axis, the expression for the
damping coefficient becomes extremely cumbersome. It would be more expedient to work out
the individual steps and arrive at the final value of the damping coefficient numerically. As
before, it may be noted that the voltage regulator has no effect on the q axis component of
machine damping, although the q axis damper windings will contribute to the reduction of the d
axis component of damping due to voltage regulator action. As before, it can be shown that the
presence of the q axis damper winding will result in a greater reduction in the d axis component
of damping due to voltage regulator action.
Supplementary Stabilizing Signals
As seen earlier, certain excitation and system parameter combinations under certain loading
conditions can introduce negative damping into the system. In order to offset this effect and to
improve system damping in general, artificial means of producing torques in phase with the
speed are introduced. These are called supplementary stabilizing signals and the networks used
to generate these signals are known as power system stabilizers. For example, a fast acting, high-
gain voltage regulator, although useful for improving transient stability margin, often depletes
the generators' natural damping, thus rendering the system response highly oscillatory. When the
use of such a high-response regulator-exciter system is indicated from a transient stability
consideration, the resulting system oscillations can be minimized or eliminated by employing
power system stabilizers.
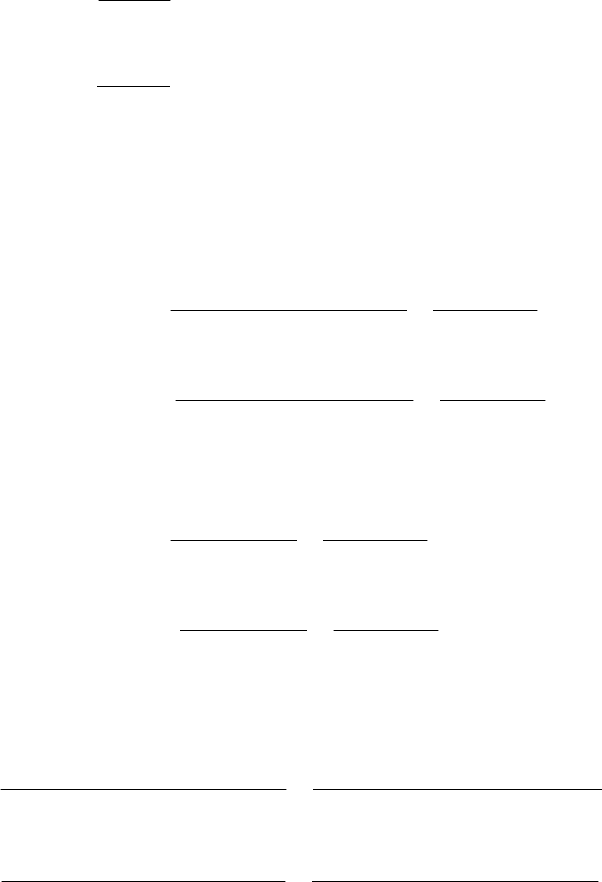
Stabilizing signals are introduced at the point where the reference voltage and the signal
proportional to the terminal voltage are compared to obtain the error signal. The signal, usually
obtained from speed, frequency or accelerating power, is processed through a suitable network to
obtain the desired phase relationship. Such an arrangement is shown schematically in Figure 6.8.
Fig. 6.8 A schematic diagram of a stabilizing signal from speed deviation
EFFECT OF EXCITATION ON STABILITY
6-23
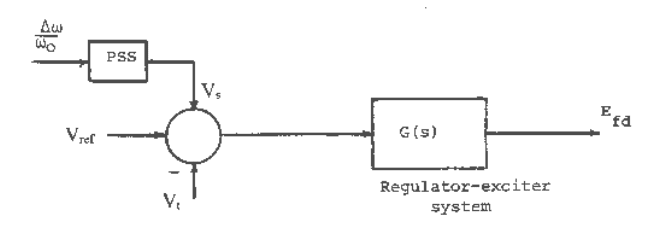
A typical power system stabilizer using speed signal is shown in Figure 6.9. A transducer
converts the signal to a voltage. The signal, depending on where in the shaft system it is
measured and picked up by the transducer, may contain, in addition to the generator swing mode,
a number of torsional modes (for a discussion on generator shaft torsionals see Chapter 9). The
high frequency filters are designed to attenuate these torsional frequencies as well as high
frequency measurement noise. The lead-lag stages (usually identical) are used to provide an
overall phase lead over the frequency range of interest to compensate for the lag produced in the
generator-excitation system. Most PSS applications use two stages of phase compensation. In
some applications three stages have been employed to obtain additional phase lead, or one stage
when less phase lead is required. The signal is then amplified and sent through a washout stage
which prevents voltage offsets during steady-state or prolonged speed or frequency change. The
output limiter prevents the stabilizer output signal from interfering with the action of the voltage
regulator during severe system disturbances.
Fig. 6.9 A typical power system stabilizer
From Figure 6.8, the linearized equation of the exciter system, including the stabilizer, can be
written as, for ∆V
ref
= 0
fdt
EsGVsF ∆=
∆−
∆
)()(
o
ω
ω
(6.139)
where F(s) is the transfer function of the stabilizer.
Here we will use synchronous machine model 3 for the purpose of illustration. Substituting
(6.139) into (6.29) and using (6.30), we obtain
δδ
ω
ω
∆
′
+
−
′
∆−∆−
∆
′
+
=
′
∆
sTK
KK
sGeKKsF
sTK
K
e
do
q
do
q
3
43
65
o3
3
1
)()(
1
(6.140)
Obtaining the expression for
q
e
′
∆
from (6.140) and substituting into (6.24), we obtain the
component of torque due to the stabilizing signal as
o
3
63
3
32
)(
1
)(
1)1(
)(
ω
ω
∆
′
+
+
′
+
=∆ sF
sTK
sGKK
sTK
sGKK
P
do
do
s
e
(6.141)

EFFECT OF EXCITATION ON STABILITY
6-24
The above can also be written as
o
)()(
ω
ω
∆
′
=∆ sFsGP
s
e
(6.142)
where
′
+
+
′
+
=
′
sTK
sGKK
sTK
sGKK
sG
do
do
3
63
3
32
1
)(
1)1(
)(
)( (6.143)
At oscillation frequency
ω
, equation (6.142) becomes
o
)()(
ω
ω
ωω
∆
′
=∆ jFjGP
s
e
(6.144)
Therefore, the damping component due to the stabilizer action is given by
[
]
)()(Re
ωω
jFjGK
s
d
′
= (6.145)
which can also be written as
[
]
s
s
d
FK
θθ
∠
′
∠
′
= GRe (6.146)
Therefore, for maximum damping effect due to the stabilizer, the stabilizer parameters should be
adjusted so as to have
θ
s
= –
θ′
. Since
θ′
is negative, the stabilizer network should ideally advance
the signal by –
θ′
. It should be noted that a selection of parameter values which provide
insufficient lead or introduce a lag in the stabilizer can either render the stabilizer ineffective or
contribute negative damping. The stabilizer must be tuned to provide the desired system
performance under the conditions which require stabilization, typically weak systems under
heavy power transfer. When there is only one frequency that exhibits poor or negative damping,
it is a relatively simple matter to select the appropriate phase lead. However, in an interconnected
system there may by multiple frequencies, that change with system and loading conditions, that
need to be stabilized. The actual phase lead selected would therefore be a compromise to produce
satisfactory performance at all these frequencies.
The amount of damping that can be provided by a PSS can be seen to be directly proportional to
the gain. However, the gain cannot be selected arbitrarily. Above a certain value of the gain
control loop instability sets in. (Note that, in the analysis above, only the rotor angle mode was
considered in an idealized single machine-infinite bus system.) The measurement noise and
torsional frequencies that are not completely filtered out can also produce undesirable effects
unless the gain is limited. There is also the question of interactions among PSSs in a large
interconnected system. The effect of the PSS on all modes of oscillation as well as the
interactions among PSSs can be studied using a detailed system model as discussed in Chapter 8.
It is generally recommended that the final selection of phase lead and gain be done in a field test.
It is customary to select a gain about one-third of the value at which small rapid oscillation is just
sustained.
Note that for normal values of
ω
, )(
ω
jG
′
, from (6.143), can approximately be written as
o
90)(
2
−∠
′
≈
′
θ
ω
ω
G
T
K
jG
do
(6.147)

EFFECT OF EXCITATION ON STABILITY
6-25
since 1
1
)(
1
3
63
≈
′
+
+
do
TKj
jGKK
ω
ω
Therefore, a quick estimate of the required phase advance by the stabilizer network can easily be
made.
It can also be seen from equation (6.147) that, due to the large combined lag in the machine and
the regulator-exciter, it would be more convenient to employ accelerating power instead of speed
as the stabilizing signal. This would then necessitate only a moderate amount of lead in the
stabilizer network. Also, the power signal is generally free from shaft torsional modes.
References
1. C. Concordia, "Steady-State Stability of Synchronous Machines as Affected by Voltage Regulator
Characteristics," AIEE Trans., PAS - 63, pp.215-220, 1944.
2. F.P. De Mello and C. Concordia, "Concepts of Synchronous Machine Stability as Affected by Excitation
Control," IEEE Trans., PAS - 88, pp.316-329, 1969.
3. P.G. Brown, F.P. De Mello, E.H. Lenfest and R.J. Mills "Effects of Excitation, Turbine Energy Control and
Transmission on Transient Stability," IEEE Trans., PAS - 89, pp.1247-1253, 1970.
4. IEEE Committee Report, "Computer Representation of Excitation System," IEEE Trans., PAS - 87, pp.1460-
1464, 1968.
5. IEEE Committee Report, "Excitation System Models for Power System Stability Studies," IEEE Trans., PAS
- 100, pp.494-509, 1981.
6. Power Technologies, Inc. Course Notes, “Electrical Machine Dynamics – II,” 1976.
7. IEEE Tutorial Course, “Power System Stabilization via Excitation Control,” 81 EHO175-0 PWR, 1981.