Москвин Б.В. Теория принятия решений
Подождите немного. Документ загружается.

211
только от того, каково конкретное состояние динамической сис-
темы. Поэтому для любого допустимого состояния x(t), которое
приняла динамическая система в результате того или иного
внешнего воздействия, известно управление, позволяющее из
данного состояния x(t) достигать заданного конечного состояния
наилучшим образом. Интуитивно это и понятно, действительно,
оптимальное управление в момент t зависит от состояния систе-
мы
, а не от предыстории процесса (начального состояния и того,
каким образом происходило движение системы до момента t).
Математически задачу синтеза можно сформулировать
следующим образом. Необходимо найти функцию управления
u(t,x(t)), t ∈ T = (t
o
,t
f
], доставляющую минимум функционалу
J(t,x,u) → min , (10.1)
и удовлетворяющую ограничениям вдоль траектории
u(t,x(t)) ∈G
u
⊆ R
m
, (10.2)
и которая переводит динамическую систему
x(t))u(t,x,(t, (t)x ϕ=
) (10.3)
в конечное состояние
x(t
f
) ∈ E
f
(10.4)
из некоторого начального состояния.
Сформулированная задача похожа на задачу поиска опти-
мального программного управления (8.25)-(8.28). Существенным
отличием является то, что в задаче синтеза значения x(t
o
) и t
o
являются произвольными. Следовательно, необходимо постро-
ить управление, переводящее систему (10.3) в конечное состоя-
ние x(t
f
)∈E
f
из любого начального состояния x(t
o
) для любого
момента времени t
o
.
В общем случае задача синтеза (т.е. вопрос о существова-
нии управления в форме синтеза и способы его нахождения) не
решена.
10.2. Синтез управления в линейных динамических
системах
Наиболее простыми задачами синтеза оптимального
управления, поставленными в 10.1, являются задачи синтеза ли-
нейных (8.5) систем с линейным или квадратичным функциона-
лом. Для таких систем выполняются условия теоремы существо-
вания и единственности, т.е. для каждого x
o
=x(t
o
) существует (и
только одно) управление u(t,x
o
), переводящее систему из со-
стояния x
o
в заданное состояние x
f
= x(t
f
).
212
Для любого момента времени τ∈(t
o
,t
f
] управление u(t,x
o
),
рассматриваемое на интервале (τ,t
f
] должно быть оптимальным,
тогда можно обозначить
u(τ,x
o
)= v(x(τ)).
В этом случае (8.4) можно переписать
. v(x) B(t) x A(t) x
+
=
Решение данного уравнения с произвольно заданным x
o
позво-
ляет найти функцию v(x), которая синтезирует оптимальное
управление, переводящее систему из x
o
в x
f
. В нахождении та-
кой функции v(x) и заключается задача синтеза для линейных
систем.
Рассмотрим особенности синтеза оптимального управле-
ния для линейной системы в задаче Лагранжа с квадратичным
функционалом
() () () () ()
()
min dt u R u x Q x
2
1
u) x,J(
f
o
t
t
тт
→ττ+τττ=
∫
,
здесь Q(t) - неотрицательно-определенная симметрическая мат
рица;
R(t) - положительно определенная симметрическая матри-
ца для ∀t.
Тогда x
т
(t)Q(t)x(t) ≥ 0, u
т
(t)R(t)u(t) > 0 при ∀t ∈ (t
o
,t
f
].
В соответствии с принципом максимума Л.С. Понтрягина
оптимальное управление в любой момент времени находится,
исходя из максимизации функции Гамильтона (8.43)
B(t)u A(t)x R(t)uu
2
1
Q(t)x x
2
1
H
ттт
о
т
о
ψ+ψ+ψ+ψ= ,
или, транспонируя обе части равенства,
ψ+ψ+ψ+ψ= B(t)uA(t) x R(t)uu
2
1
x Q(t) x
2
1
H
ттт
о
т
о
Обозначим
(
)
n1,..., i ,
t
(t)p
0
i
i
=
ψ
ψ
= .
Тогда в соответствии с (8.38)
n1,..., i ,
xd
d
- p
i
iоi
=
Η
=ψ=ψ
.
Откуда
213
.pt- x Q(t) - p
т
)(Α=
(10.5)
Оптимальное управление должно доставлять максимум
функции Гамильтона. Необходимым условием этого является ра-
венство нулю частной производной гамильтониана по управле-
нию, откуда
R(t) u + B
т
(t) p = 0.
Тогда
u = - R
-1
(t) B
т
(t) p.
Подставляя последнее выражение для управления в диф-
ференциальные уравнения (8.4), описывающие изменение со-
стояния, получим
pt(t)BB(t)R - A(t)x x
т-1
)(=
. (10.6)
Будем искать неизвестную функцию p(t) в виде
p(t) = K(t) x(t), (10.7)
где K(t) - неизвестная матрица размерности n×n.
Тогда (10.6) можно переписать в виде
(
)
xt(t)BB(t)R - A(t)x x
т-1
Κ=
.
Подставляя (10.7) в (10.5), с учетом последнего выражения
можно получить
(t)K(t)x. -Q(t)x -
(t)K(t)x (t)BK(t)B(t)R -K(t)A(t)x K(t)x xK(t) (t)x K
т
т-1
Α=
=+=+
Отсюда неизвестная в (10.7) матрица K(t) должна удовлетворять
матричному дифференциальному уравнению вида
(
)
).( )(Κ)Β)()(Β)(Κ + )(Κ=
−1
tQ-tt(tRtttt A- K(t)A(t) - (t)K
тт
Данное нелинейное матричное дифференциальное урав-
нение, известное как уравнение Риккати, позволяет найти матри-
цу K(t) для любого момента времени t∈(t
o
,t
f
] при начальных ус-
ловиях, вытекающих из условий трансверсальности. Тогда опти-
мальное управление u*(t) для состояния x(t) определяется как
u*(t) = - R
-1
(t) B
т
(t) K(t) x(t).

214
Для стационарной линейной динамической системы, опи-
сываемой уравнениями (8.5), дифференциальное уравнение Рик-
кати превращается в нелинейное матричное уравнение вида
KA + A
т
K - KBR
-1
B
т
K + Q = 0.
Решение уравнений Риккати базируется, как правило, на
использовании итеративных численных методов.
10.3. Синтез управления в рекуррентных системах.
Принцип оптимальности. Беллмана.
На основе поставленной в 8.7 задачи оптимального про-
граммного управления рекуррентными системами (8.56)-(8.59)
может быть сформулирована задача синтеза в следующем виде
()
min x(k)u(k,(x(k),F u)J(x,
1-N
0k
→=
∑
=
, (10.8)
x(k+1) = f(x(k),u(k),x(k)), k = 0,...,N-1, (10.9)
u(k,x(k)) ∈ G
u
⊆ R
m
, k = 0,...,N-1, (10.10)
x(N) = x
f
. (10.11)
Для поиска оптимального управления u*(k,x(k)) в рекур-
рентных системах часто используются, алгоритмы основанные на
принципе оптимальности Р.Беллмана. Принцип оптимальности,
сформулированный для непрерывных систем, представляет со-
бой развитие принципа причинности для динамических систем
(см.8.1). Приведем формулировку принципа оптимальности и не-
которые следствия, вытекающие из него и поясняющие данный
принцип.
Принцип оптимальности.
Оптимальное управление в любой момент времени t, обла-
дает тем свойством, что каково бы ни было начальное состояние
динамической системы и управления в моменты времени, пред-
шествующие t, последующие управления должны быть опти-
мальны относительно состояния динамической системы в момент
времени t.
215
Следствие 1.
Оптимальное управление в любой момент времени t не зави-
сит от предыстории системы и определяется только состоянием
системы в момент t и целью управления.
Следствие 2.
В любой момент времени t (t0≤t<t
f
) участок оптимальной траек-
тории от x(t) до (t
f
) сам по себе является оптимальной траектори-
ей.
Следствие 3.
Если в некоторый момент времени управление не опти-
мально, то последствия этого отклонения от оптимального управ-
ления нельзя исправить в будущем.
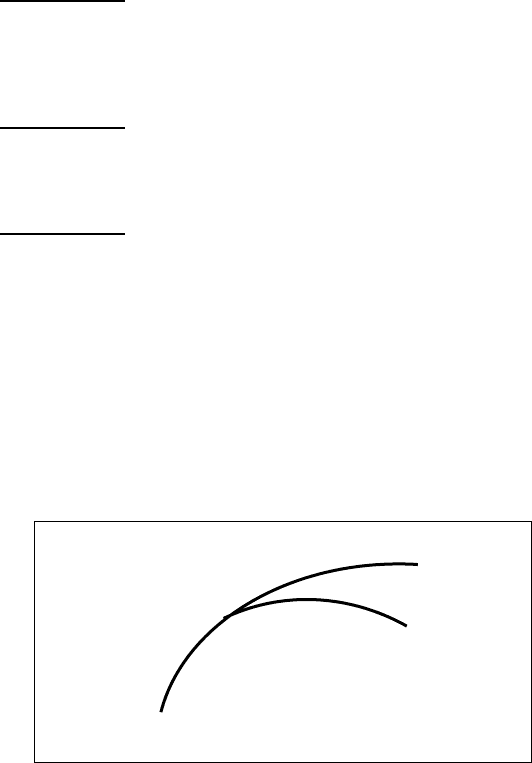
Поясним принцип оптимальности в задаче (10.8)-(10.11).
Пусть имеется (см. рис.10.1) оптимальная траектория, переводя-
щая систему из состояния x(0) в состояние x(N) и доставляющая
минимум функционалу J(x,u). Пусть точка x(s) разбивает рас-
сматриваемую траекторию на два
участка: участок 1 - x(k),
k=0,...,s-1; участок 2 - x(k), k=s,...,N. Участок 2 может рассматри-
ваться и как самостоятельная траектория. Эта траектория будет
оптимальной, если она доставляет минимум функционалу.
Рис.10.1.
В соответствии со следствием 2 принципа оптимальности -
участок 2 оптимальной траектории 1-2 сам по себе является оп-
тимальной траекторией.
Предположим противное, пусть существует другая траекто-
рия 3, отличная
от траектории 2 и доставляющая функционалу
2 x(N)
x(s) 3
1
x(0)
216
J(x,u) значение, меньшее, чем на траектории 2. Но тогда на ин-
тервале от 0 до N оптимальной будет не траектория 1-2, а траек-
тория 1-3. Последнее противоречит исходному предположению
об оптимальности траектории 1-2. Следовательно, участок 2
должен быть оптимальной траекторией, как это и следует из
принципа оптимальности.
На основе приведенного принципа оптимальности Р. Белл-
маном был разработан алгоритм
динамического программирова-
ния, показавший достаточно высокую эффективность в задачах
оптимизации рекуррентных систем и позволяющий получать оп-
тимальное управление в форме синтеза.
10.4. Алгоритм динамического программирования
Пусть состояние x(k) на любом шаге k, k=1,...,N-1 может
принимать значение из конечного множества состояний (на шаге
N в соответствии с (10.11) это множество состоит из одного эле-
мента x(N)=x
f
); обозначим множество различных состояний на
шаге k, как X
k
. Отметим, что число таких состояний может быть
достаточно велико, так, например, если x(k) - вектор, состоящий
из четырех компонент, и каждая компонента может принимать
всего 3 значения, то при любом k значение ⎜X
k
⎜ = 3
4
= 81.
Суть алгоритма динамического программирования состоит
в том, что, построение оптимального управления, как функции
состояния, производится из конца траектории к началу. Начиная с
предпоследнего (k = N -1) шага, для каждого допустимого состоя-
ния x(k) (число которых равно ⎜X
k
⎜) рассчитывается оптимальное
управление u*(k,x(k)), которое согласно принципу оптимальности
соответствует оптимальной траектории x*(k).
Итак, пусть на шаге (N-1) система находится в некотором
состоянии x(N-1), тогда оптимальное управление u*(N-1,x(N-1))
должно в соответствии с (10.9)-(10.11) переводить систему в со-
стояние x(N) = x
f
и доставлять минимум функционалу (10.8), т.е.
оно находится в результате решения задачи
n i m 1)))-x(N1,-u(N1),-F(x(N
u
G1))-x(N1,-u(N ∈
→
Обозначим минимальное значение функционала через
S
N-1
(x(N-1)), тогда последнее выражение можно переписать в ви-
де
217
()
(
)
1))- x(N1,-u(N 1),-x(N F min 1)-x(N S
u
G1))-x(N1,-u(N
1-N
∈
=
, (10.11)
При фиксированном значении x(N-1) минимизируемая функция в
(10.11) зависит только от u(N-1,x(N-1)), откуда и находится опти-
мальное управление u*(N-1,x(N-1)).
Рассмотрим теперь предыдущий интервал, шаг (N-2). Пусть
система находится в состоянии x(N-2), тогда задачу поиска опти-
мального управления в точке (N-2), с учетом (10.11), (10.8) можно
представить в виде
()
()()
1)))- x(N1,-u(N 1),-x(N F2))- x(N2,-u(N 2),-x(N (F min
2)-x(N S
u
u
G1))-x(N1,-u(N
G2))-x(N2,-u(N
2-N
+=
=
∈
∈
Поскольку первое слагаемое под знаком минимума не зависит от
состояния и управления на шаге (N-1), то последнее выражение
можно переписать в виде
1)))).-x(N1,-u(N1),-F(x(N n i m
2)))-x(N2,-u(N2),-F(x(N ( n i m 2))-(x(NS
u
u
G1))-x(N1,-u(N
G2))-x(N2,-u(N
2-N
∈
∈
+
+=
Второе слагаемое в соответствии с (10.11) равно S
N-1
(x(N-1)), то-
гда
1)))-(x(NS2)))-x(N2,-u(N2),-(F(x(Nn i m 2))-(x(NS
1-N
G2))-x(N2,-u(N
2-N
u
+
=
∈
Тогда в целом для произвольного шага (N-h) значение функции
S
N-h
(x(N-h))
1)))h-(x(NSh)))-x(Nh,-u(Nh),-(F(x(Nn i m
h))-(x(NS
1h-N
Gh))-x(Nh,-u(N
h-N
u
++=
=
+
∈
(10.12)
или с учетом (10.9)
h))))-u(Nh),-x(N((fSh)))-x(Nh,-u(Nh),-(F(x(Nn i m
h))-(x(N S
1h-N
Gh))-x(Nh,-u(N
h-N
u
+
∈
+=
=
(10.13)
В выражении (10.13) поиск минимума функции S
N-h
(x(N-h))
выполняется по одной переменной u(N-h) = u(N-h,x(N-h)). Полу-
ченное при этом значение u(N-h) и будет искомым оптимальным
управлением, найденным, как функция состояния u*(N-h,x(N-h)).

218
Функция S
N-h
(x(N-h)) часто называется функцией Б е л л -
м а н а, а уравнение (10.13) р е к у р р е н т н ы м у р а в н е -
н и е м Б е л л м а н а.
Итак, начиная с шага N-1 (h=1) находится оптимальное
управление u*(N-h,x(N-h)),
которое вычисляется, исходя из ми-
нимизации функции Беллмана S
N-h
(x(N-h)); процесс вычислений
заканчиваются, когда h = N.
Замечание.
В ситуациях, когда задано исходное состояние x(0), можно
вычислить оптимальное программное управление, как функцию
шага k=0,..., N-1 (k=N-h). Действительно, поскольку известно оп-
тимальное управление в форме синтеза u*(N-h,x(N-h)), h=1,..,N,
то при h=N (k=0) и известном состоянии x(0) можно вычислить
оптимальное управления u*(0). Тогда из выражения (10.9) можно
определить состояние системы x(1) (при k=1 (h=N-1)). Для со-
стояния x(1) выбирается оптимальное программное управление
u*(1), уже рассчитанное ранее.
Теперь из (10.9) можно найти со-
стояние x(2) и так далее... Таким образом, формируется опти-
мальное программное управление u*(k), k=0,..., N-1.
Алгоритм.
0). Исходное состояние h = 1. Конечное состояние системы
задано x(N)=x
f
. Система находится в состоянии x(N-h) = x(N-1);
S
N-h+1
(x(N-h+1))) = S
N
(x(N)) = 0; X
N-h+1
= {x(N)}
1). Рассчитывается множество состояний X
N-h
, число которых
равно ⎜X
N-h
⎜.
2). Для каждой пары состояний x(N-h)∈X
N-h
и x(N-h+1)∈X
N-h+1
находятся различные управления u(N-h,x(N-h))∈G
u
, позволяю-
щие перевести систему из состояния x(N-h) в состояние x(N-
h+1). Для каждого такого управления рассчитывается значение
функции
Z(x(N-h),u(N-h,x(N-h)),x(N-h+1)) =
= (F(x(N-h),u(N-h,x(N-h))) + S
N-h+1
(x(N-h+1))) .
3). Производится выбор оптимального управления из условия
1))h-x(Nh)),-x(Nh,-u(Nh),-Z(x(N n i m arg h))-x(Nh,-(N *u
h))-h,x(N-u(N
+
=
Вычисляется значение функции Беллмана
219
1))h-x(Nh)),-x(Nh,-u(Nh),-Z(x(N n i m h))-(x(NS
h))-x(Nh,-u(N
h-N
+
=
В результате выполнения данного шага для каждого допустимого
в момент (N-h) состояния x(N-h) вычисляется оптимальное
управление u*(N-h,x(N-h)), состояние x(N-h+1), в которое перей-
дет система под воздействием данного управления, и значение
функции Беллмана S
N-h
(x(N-h)).
4). h = h + 1. Если (N - h) < 0 - процесс счета заканчивается; в
противном случае производится переход на шаг 1.
Рассмотренный алгоритм динамического программирова-
ния может быть распространен на задачи синтеза оптимального
управления для непрерывных динамических систем, описывае-
мых дифференциальными уравнениями (доказательство этого
было проведено В.Г.Болтянским). При этом рекуррентное урав-
нение (10.13) преобразуется в нелинейное дифференциальное
уравнение в
частных производных. При выполнении определен-
ных требований непрерывности частных производных по всем
своим аргументам (что, кстати, довольно часто не выполняется,
даже для простых задач) может быть найдено оптимальное
управление в форме синтеза.
Контрольные вопросы
1. В каком виде ищется оптимальное решение в задачах син-
теза оптимального управления ?
2. В чем заключаются достоинства практического использова-
ния управления в виде синтеза ?
3. В чем состоят трудности нахождения оптимального решения
в форме синтеза управления ?
4. Каким образом найти оптимальное управление в форме
синтеза, если изменение состояния динамической системы опи-
сывается
линейными дифференциальными уравнениями, а
функционал является квадратичным ?
5. В чем состоит суть принципа оптимальности ?
6. В чем заключаются основные особенности поиска опти-
мального решения с использованием алгоритма динамического
программирования ?
220
11. ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ ОПТИМАЛЬНОГО
УПРАВЛЕНИЯ
11.1. Оптимальное управление сближением КА
В 8.4.1. рассматривалась постановка задачи оптимального
управления сближением КА. Первым вопросом, который возника-
ет при формализации задачи принятия решения с использовани-
ем динамических моделей, является определение понятия со-
стояния динамической системы. В зависимости от того, какой со-
став характеристик выбран в качестве состояния, определяется
вид дифференциальных уравнений, описывающих изменение
данного состояния во
времени. Так в 8.4.1 состояние описыва-
лось вектором x(t), состоящим из двух компонент x(t) =
║x
1
(t)
x
2
(t)║
т
= ║r(t) v(t)║
т
, где r(t) - скалярная функция времени, описы-
вающая изменение относительной дальности между КА; v(t) -
функция, описывающая изменение относительной скорости. В
этом случае дифференциальные уравнения, описывающие изме-
нение состояния, имеют вид
x x
2 1
=
,
u x
2
=
.
Отметим, что, если бы в качестве состояния были выбраны па-
раметры положения КА и его скорости в абсолютной геоцентри-
ческой системе координат (ортогональная система, центр которой
соответствует центру Земли), то движение того же самого объек-
та описывалось бы шестью дифференциальными уравнениями.
Величина прикладываемого импульса u(t) в любой момент
времени ограничивается техническими
характеристиками двига-
тельной установки
u(t) ∈ [-U
o
,+U
o
] .